Текст описания приведен в факсимильном виде.
















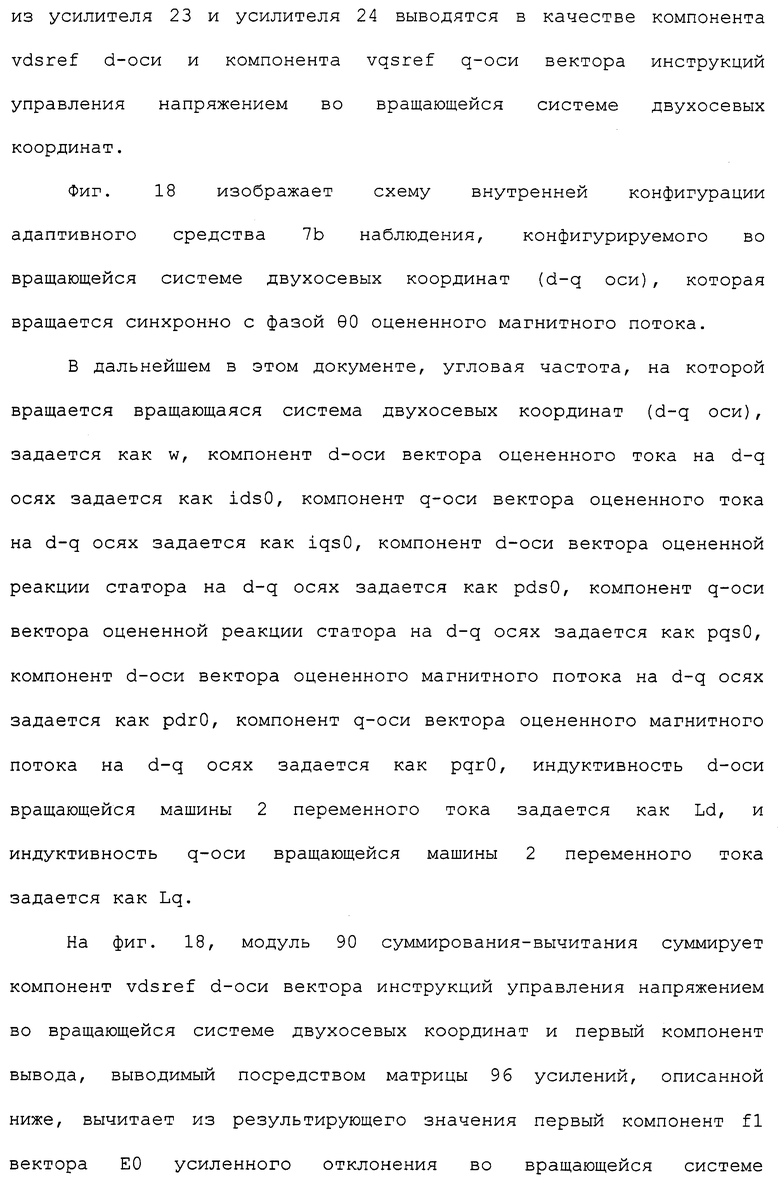


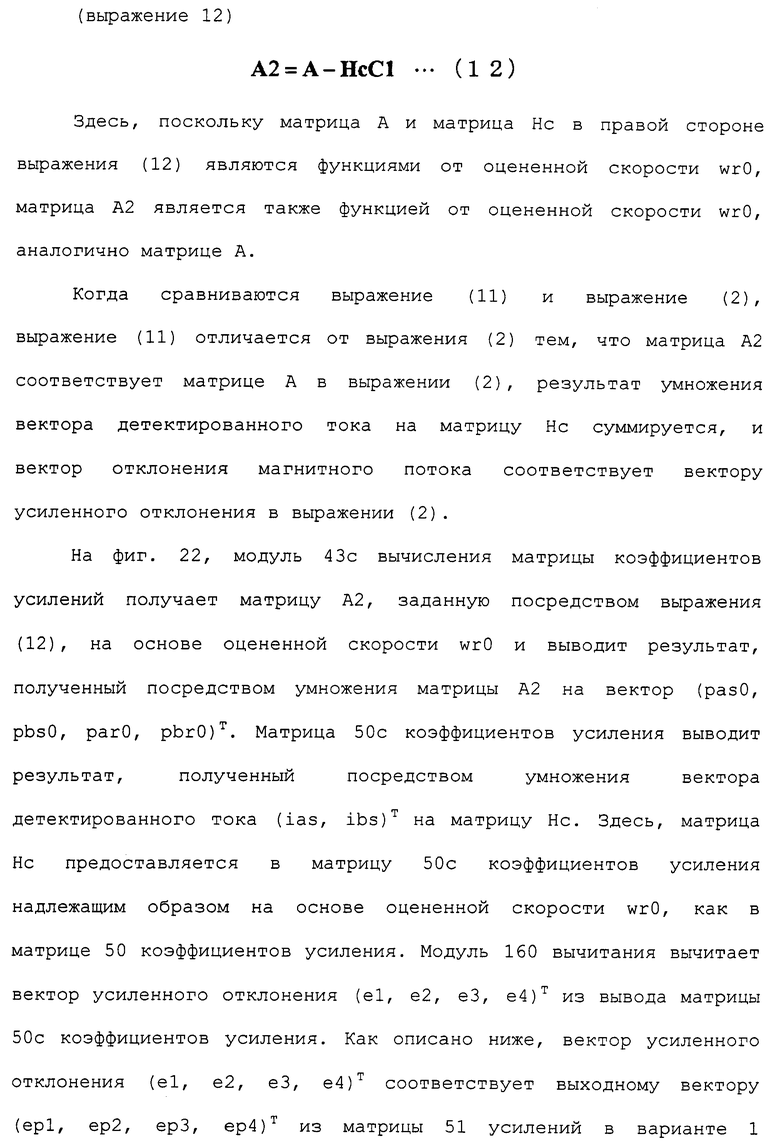
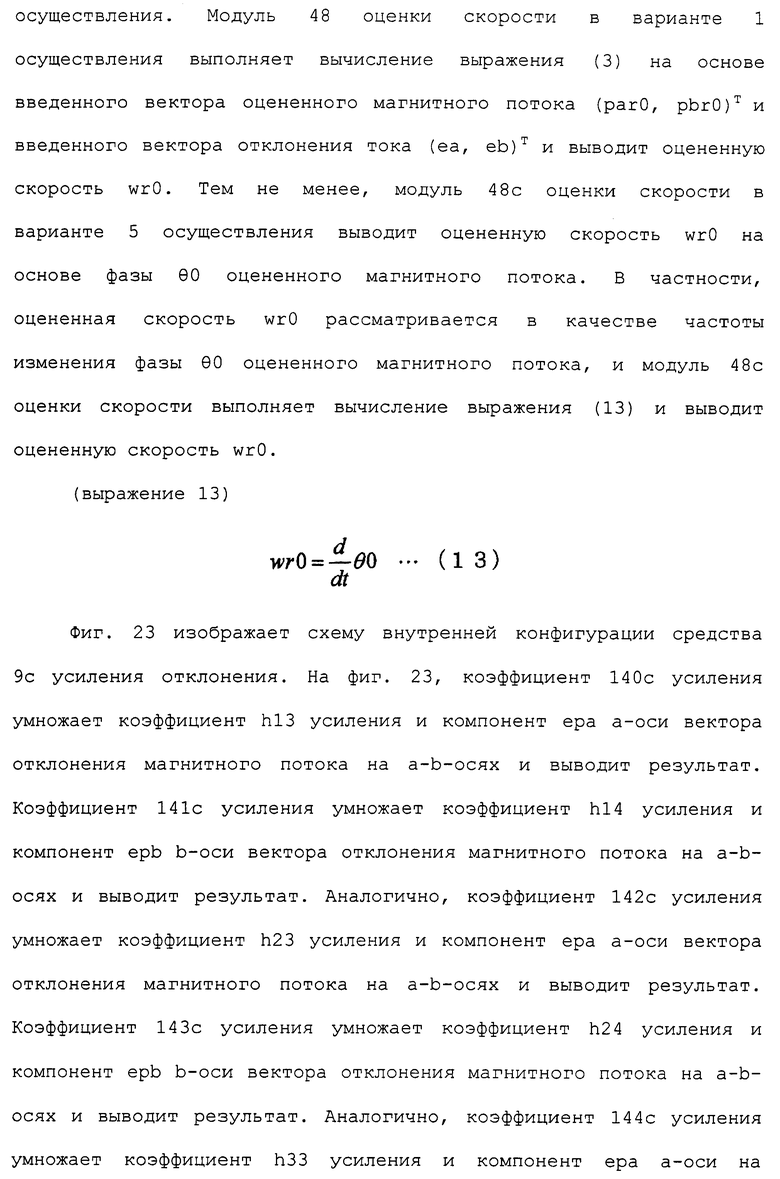







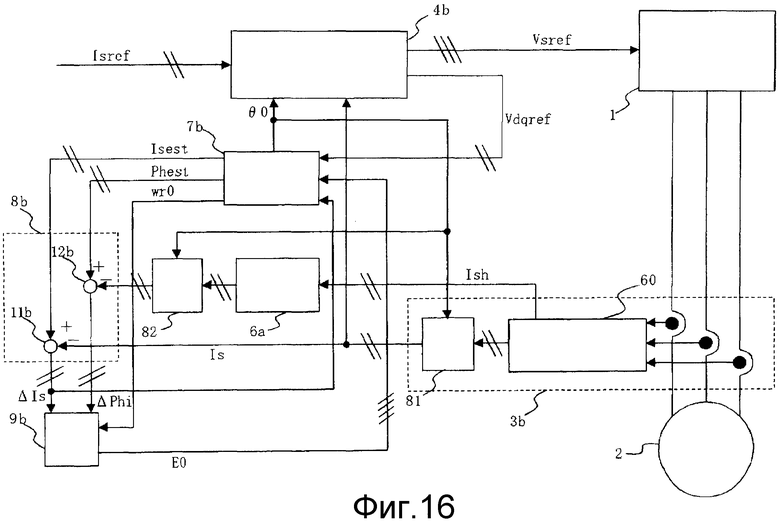




Изобретение относится к области электротехники и может быть использовано для управления возбуждением вращающейся машины переменного тока. Техническим результатом является обеспечение плавного приведения в действие от области низкой скорости, включающей в себя нулевую скорость, до области высокой скорости. Контроллер для вращающейся машины переменного тока содержит адаптивное средство (7) наблюдения для вывода фазы θ0 оцененного магнитного потока, вектора Isest оцененного тока, вектора Phest оцененного магнитного потока и оцененной скорости wr0 на основе вектора Vsref инструкций управления напряжением, вектора ΔIs отклонения тока и вектора Е0 усиленного отклонения; средство (8) вычисления вектора отклонения тока ΔIs между вектором Isest оцененного тока и вектором Is детектированного тока из средства (3) детектирования вектора тока и вектора ΔPhi отклонения магнитного потока между вектором Phest оцененного магнитного потока и вектором Phi детектированного магнитного потока из средства (6) детектирования вектора магнитного потока; и средство (9) усиления отклонения для усиления вектора ΔIs отклонения тока и вектора ΔPhi отклонения магнитного потока и вывода результата в качестве вектора Е0 усиленного отклонения. 2 н. и 10 з.п. ф-лы, 23 ил.
1. Контроллер для вращающейся машины переменного тока, содержащий
средство детектирования вектора тока для детектирования вектора тока вращающейся машины переменного тока и вывода вектора тока в качестве вектора детектированного тока;
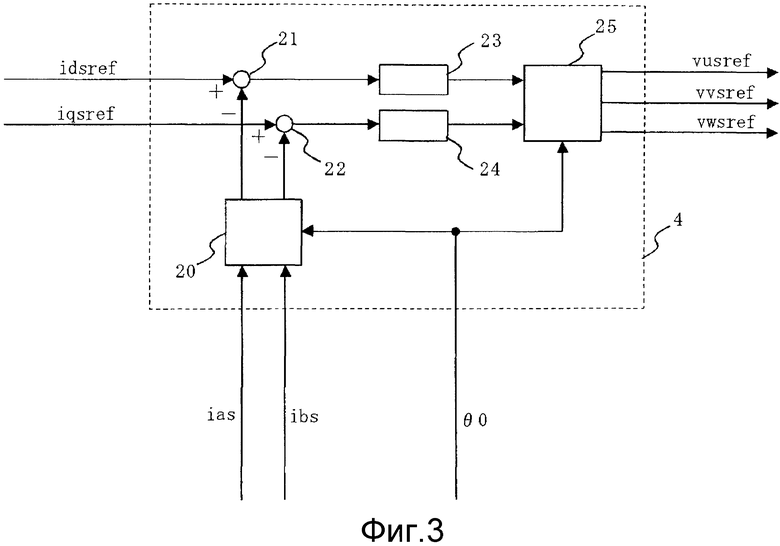
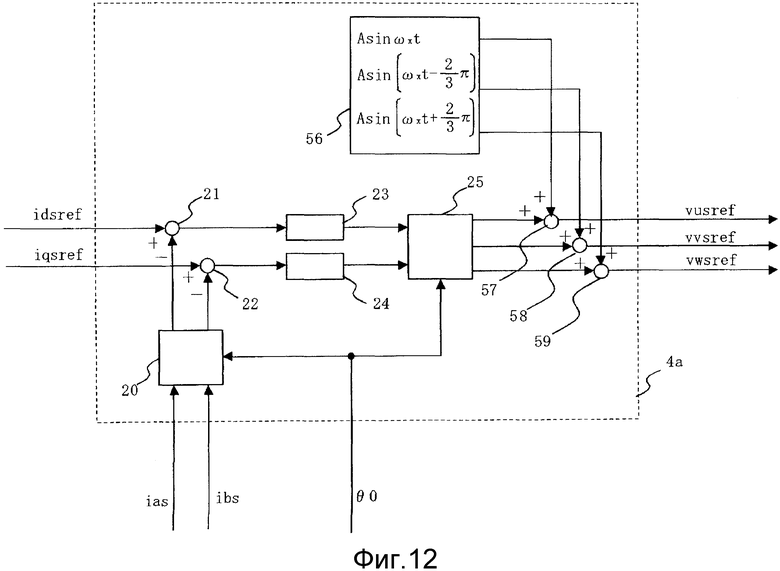
средство управления вращающейся машиной переменного тока для обращения к фазе оцененного магнитного потока и вывода вектора инструкций управления напряжением так, что вектор детектированного тока совпадает с вектором инструкций управления током;
средство приложения напряжения для приложения напряжения к вращающейся машине переменного тока на основе вектора инструкций управления напряжением;
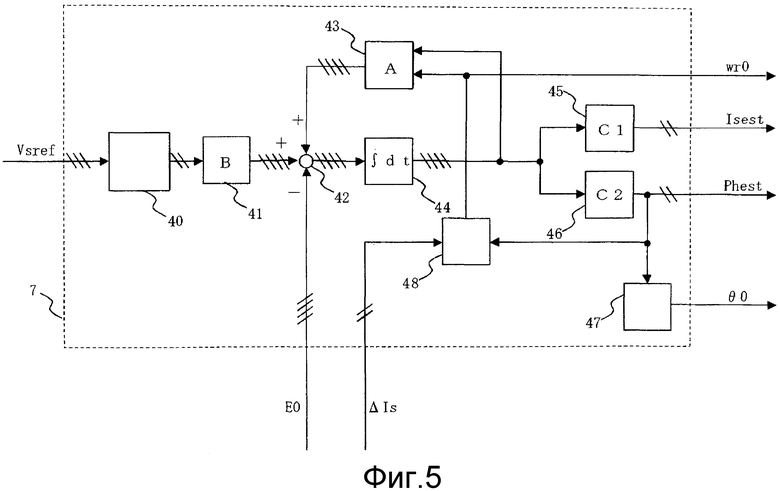
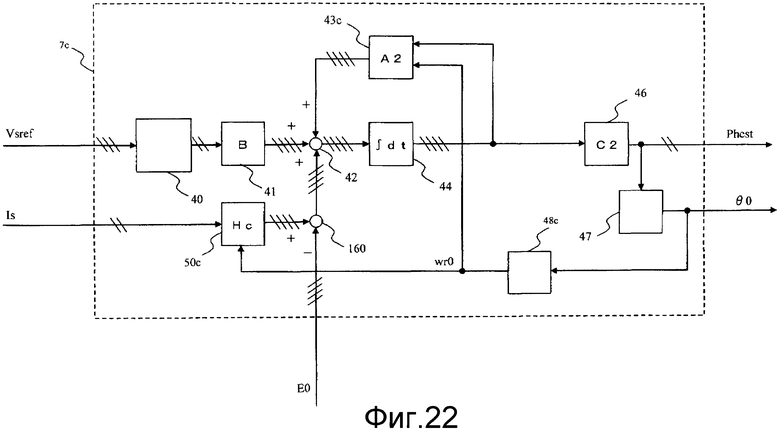
адаптивное средство наблюдения для вывода фазы оцененного магнитного потока на основе вектора инструкций управления напряжением; и
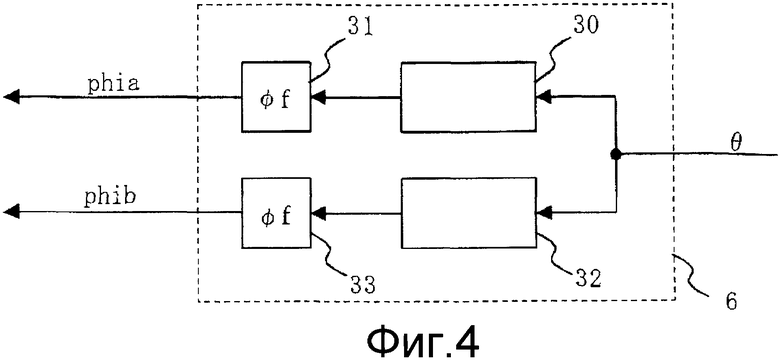
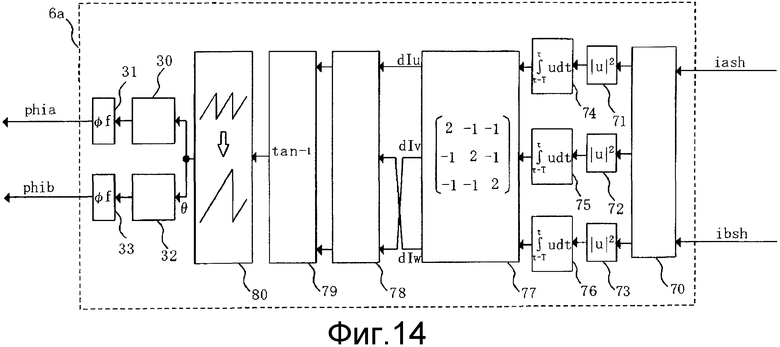
средство детектирования вектора магнитного потока для детектирования вектора магнитного потока и вывода вектора магнитного потока в качестве вектора детектированного магнитного потока, при этом
адаптивное средство наблюдения выводит вектор оцененного тока и вектор оцененного магнитного потока в дополнение к фазе оцененного магнитного потока на основе вектора отклонения тока, и вектор усиленного отклонения в дополнение к вектору инструкций управления напряжением,
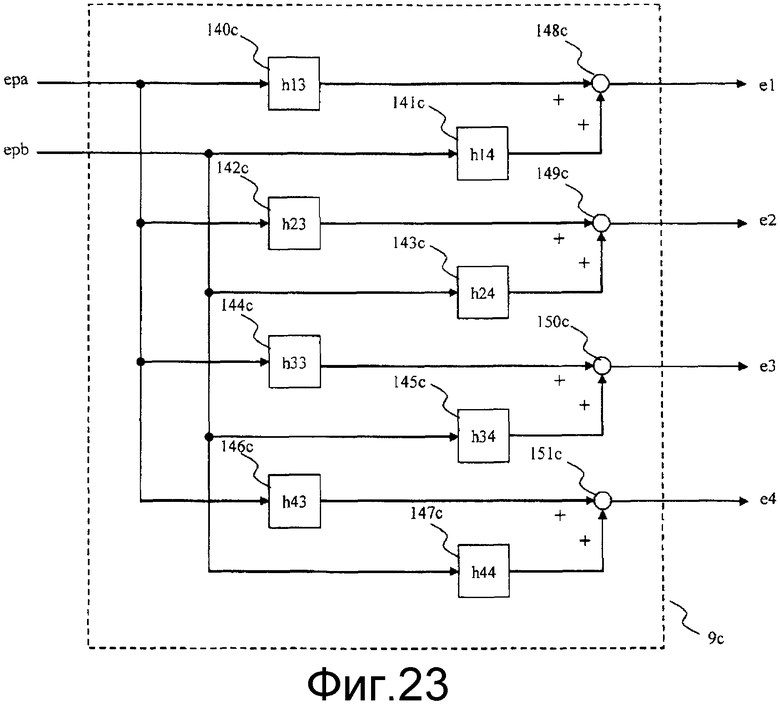
при этом контроллер дополнительно содержит средство вычисления вектора отклонения для вычисления вектора отклонения тока, который является отклонением между вектором оцененного тока и вектором детектированного тока, и вектора отклонения магнитного потока, который является отклонением между вектором оцененного магнитного потока и вектором детектированного магнитного потока, и для вывода вычисленного вектора отклонения тока и вычисленного вектора отклонения магнитного потока в качестве вектора усиленного отклонения.
2. Контроллер для вращающейся машины переменного тока, содержащий:
средство детектирования вектора тока для детектирования вектора тока вращающейся машины переменного тока и вывода вектора тока в качестве вектора детектированного тока;
средство управления вращающейся машиной переменного тока для обращения к фазе оцененного магнитного потока и вывода вектора инструкций управления напряжением так, что вектор детектированного тока совпадает с вектором инструкций управления током;
средство приложения напряжения для приложения напряжения к вращающейся машине переменного тока на основе вектора инструкций управления напряжением;
адаптивное средство наблюдения для вывода фазы оцененного магнитного потока на основе вектора инструкций управления напряжением; и
средство детектирования вектора магнитного потока для детектирования вектора магнитного потока и вывода вектора магнитного потока в качестве вектора детектированного магнитного потока, при этом
адаптивное средство наблюдения выводит вектор оцененного магнитного потока в дополнение к фазе оцененного магнитного потока на основе вектора усиленного отклонения в дополнение к вектору инструкций управления напряжением, и
контроллер дополнительно содержит средство вычисления вектора отклонения для вычисления вектора отклонения магнитного потока, который является отклонением между вектором оцененного магнитного потока и вектором детектированного магнитного потока, и для вывода вычисленного вектора отклонения магнитного потока в качестве вектора усиленного отклонения.
3. Контроллер для вращающейся машины переменного тока по п.1, в котором
адаптивное средство наблюдения дополнительно выводит оцененную скорость,
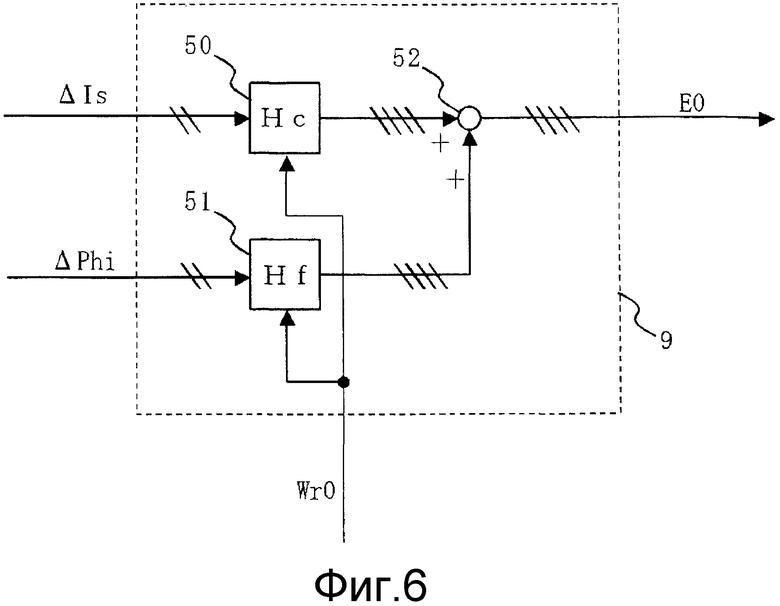
контроллер дополнительно включает в себя средство усиления отклонения, которое обеспечено между средством вычисления вектора отклонения и адаптивным средством наблюдения, которое усиливает выходной сигнал из средства вычисления вектора отклонения посредством предварительно определенного коэффициента усиления с использованием оцененной скорости в качестве параметра и которое выводит усиленный выходной сигнал в качестве вектора усиленного отклонения в адаптивное средство наблюдения, и
усилитель, посредством которого вектор отклонения магнитного потока усиливается в средстве усиления отклонения, устанавливается так, что имеет значение усиления, которое меньше в момент, когда оцененная скорость является высокой, чем значение в момент, когда оцененная скорость является низкой.
4. Контроллер для вращающейся машины переменного тока по п.1, в котором
средство детектирования вектора магнитного потока выводит вектор детектированного магнитного потока на основе положения вращения, которое выводится из средства детектирования положения вращения для детектирования положения вращения вращающейся машины переменного тока.
5. Контроллер для вращающейся машины переменного тока по п.1, в котором
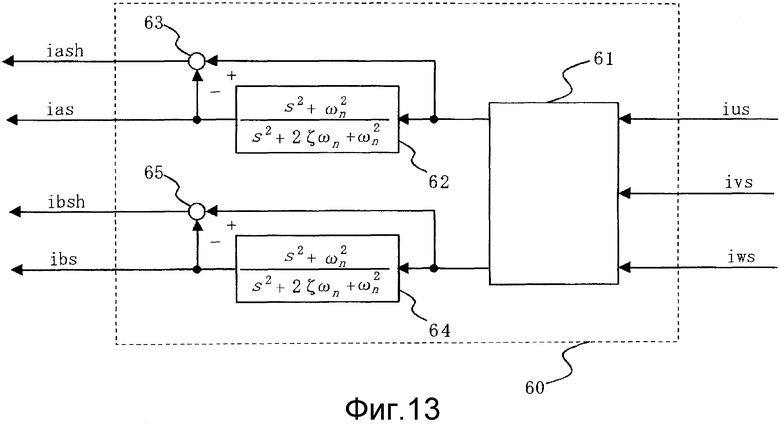
контроллер дополнительно включает в себя средство наложения напряжения для наложения высокочастотного напряжения, которое имеет более высокую частоту, чем основная частота для возбуждения вращающейся машины переменного тока, во вращающейся машине переменного тока, и
средство детектирования вектора магнитного потока выводит вектор детектированного магнитного потока на основе вектора высокочастотного тока вследствие высокочастотного напряжения, извлеченного средством детектирования вектора тока.
6. Контроллер для вращающейся машины переменного тока по п.5, в котором
амплитуда высокочастотного напряжения, которое должно быть наложено в средстве наложения напряжения, задана так, что она имеет значение, которое меньше в момент, когда скорость вращения вращающейся машины переменного тока является высокой, чем значение в момент, когда скорость вращения вращающейся машины переменного тока является низкой.
7. Контроллер для вращающейся машины переменного тока по п.1, в котором
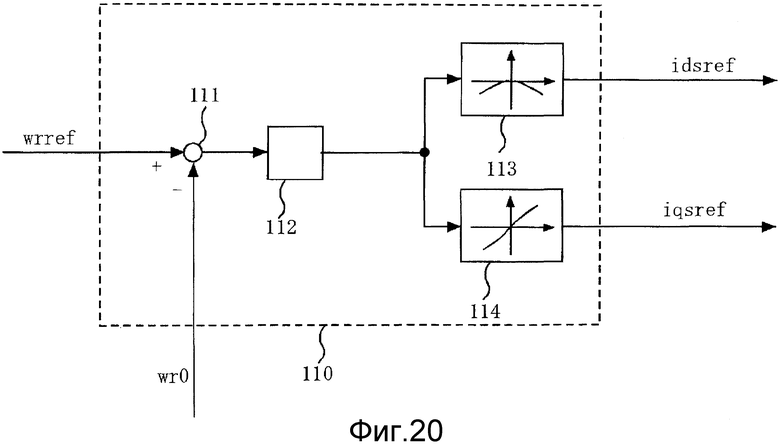
контроллер дополнительно включает в себя средство управления скоростью для формирования вектора инструкций управления током так, что оцененная скорость из адаптивного средства наблюдения совпадает с инструкцией управления угловой скоростью, и для вывода сформированного вектора инструкций управления током в средство управления вращающейся машиной переменного тока.
8. Контроллер для вращающейся машины переменного тока по п.2, в котором
адаптивное средство наблюдения дополнительно выводит оцененную скорость,
контроллер дополнительно включает в себя средство усиления отклонения, которое обеспечено между средством вычисления вектора отклонения и адаптивным средством наблюдения, которое усиливает выходной сигнал из средства вычисления вектора отклонения посредством предварительно определенного коэффициента усиления с использованием оцененной скорости в качестве параметра и которое выводит усиленный выходной сигнал в качестве вектора усиленного отклонения в адаптивное средство наблюдения, и усилитель, посредством которого вектор отклонения магнитного потока усиливается в средстве усиления отклонения, устанавливается так, что имеет значение усиления, которое меньше в момент, когда оцененная скорость является высокой, чем значение в момент, когда оцененная скорость является низкой.
9. Контроллер для вращающейся машины переменного тока по п.2, в котором
средство детектирования вектора магнитного потока выводит вектор детектированного магнитного потока на основе положения вращения, которое выводится из средства детектирования положения вращения для детектирования положения вращения вращающейся машины переменного тока.
10. Контроллер для вращающейся машины переменного тока по п.2, в котором
контроллер дополнительно включает в себя средство наложения напряжения для наложения высокочастотного напряжения, которое имеет более высокую частоту, чем основная частота для возбуждения вращающейся машины переменного тока, во вращающейся машине переменного тока, и
средство детектирования вектора магнитного потока выводит вектор детектированного магнитного потока на основе вектора высокочастотного тока вследствие высокочастотного напряжения, извлеченного средством детектирования вектора тока.
11. Контроллер для вращающейся машины переменного тока по п.10, в котором
амплитуда высокочастотного напряжения, которое должно быть наложено в средстве наложения напряжения, задана так, что она имеет значение, которое меньше в момент, когда скорость вращения вращающейся машины переменного тока является высокой, чем значение в момент, когда скорость вращения вращающейся машины переменного тока является низкой.
12. Контроллер для вращающейся машины переменного тока по п.2, в котором
контроллер дополнительно включает в себя средство управления скоростью для формирования вектора инструкций управления током так, что оцененная скорость из адаптивного средства наблюдения совпадает с инструкцией управления угловой скоростью, и для вывода сформированного вектора инструкций управления током в средство управления вращающейся машиной переменного тока.
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1983 |
|
SU1128361A1 |
| US 7411370 B2, 12.08.2008 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ЕР 1852967 A1, 07.11.2007 | |||
| WO 2002091558 A1, 14.11.2002. | |||

