Изобретение относится к акустике, конкретно к акустическим измерениям и методам обработки акустических сигналов, и может быть использовано в приборах и технических системах, основанных на анализе амплитудно-временных характеристик импульсных акустических сигналов, распространяющихся в неоднородных средах, в частности в акустической томографии параметров водной среды и дна, акустическом мониторинге динамических процессов в водных акваториях, подводной навигации и позиционировании, неразрушающем акустическом контроле и диагностике.
Акустические системы и приборы, использующие для измерений импульсные амплитудно-временные методы, широко применяются в подводной и атмосферной акустике, медицине для неразрушающего контроля в условиях неоднородных сред.
Основные погрешности измерений с помощью указанных методов определяются точностью определения времен прихода акустических импульсов. Точность определения времен прихода акустических импульсов зависит от применяемых технических схем измерений и алгоритмов обработки полученных результатов. Так, в случае использования амплитудного компаратора для определения момента времени прихода акустического импульса за счет сложной формы импульса время срабатывания компаратора не совпадает со временем начала импульса. Также в большинстве практических ситуаций в процессе распространения импульсного акустического сигнала за счет пространственного расхождения и потерь в среде уменьшается его амплитуда. Использование при приеме сигналов систем автоматической регулировки усиления (АРУ) позволяет поддерживать амплитуду сигнала постоянной. Но если в процессе распространения сигнала меняется его форма, что особенно сильно проявляется при распространении в ограниченных средах, то применение АРУ или амплитудных компараторов с заданными порогами не позволяет с требуемой достоверностью выделять и идентифицировать анализируемые импульсы, что делает невозможным точное определение их времен прихода. Использование измерительных схем, в которых проводится идентификация импульсов по очередности прихода во времени, имеет ограниченное применение и может использоваться только для функций отклика в средах с небольшим числом стабильных во времени приходов. Как правило, регистрируемое число приходов импульсов в реальных условиях велико и их число в течение времени измерений может изменяться. Фундаментальной основой данного явления служит неравенство фазовых скоростей различных мод и наличие отражающих границ в области распространения импульсных акустических сигналов. В процессе распространения импульса в неоднородных и ограниченных средах происходит затягивание импульсных сигналов во времени, изменяется их форма, а также появляются реплики сигнала, связанные с отражениями от границ. Еще более сложной задачей является проведение амплитудно-импульсных измерений в неоднородных средах с зависящими от времени параметрами распространения. В этом случае времена приходов акустических импульсов не являются постоянными и могут изменяться - как случайным образом, так и в соответствии с закономерностями процессов, определяющих условия распространения акустических импульсных сигналов в среде. Для указанных условий измерения необходимо выполнять с учетом наблюдаемой динамики приходов во времени, а повышение точности измерений возможно путем применения различных способов обработки эхо-сигналов.
Известен способ, в котором для повышения точности измерений времен прихода импульсных сигналов используют метод аппроксимации огибающей эхо-сигнала кривой, описываемой полиномом второй степени, и задают два уровня амплитуды для амплитудных компараторов сигнала, по которым определяют разность времен между излученным импульсным сигналом и отраженным от границы сред импульсным сигналом (п. РФ №2358243). Ограничением указанного способа являются его использование в условиях безграничной среды и возможность измерений времени прихода для случая одного отраженного сигнала, требование наличия высокого соотношения сигнал-шум при приеме и высокой точности измерения уровня ΔH, зависящей от длины волны λ (частоты заполнения) импульсного сигнала (ΔH≤λ/2).
В методе, описанном в п. США №6160758, времена распространения импульсного сигнала до приемников сигнала определяют по лагам автокорреляционных и взаимно корреляционных функций по данным, полученным с нескольких входных каналов. Способ определения местоположения источника первичного сигнала включает в себя этапы сбора многолучевых сигналов с нескольких входных каналов; фильтрацию указанных многолучевых сигналов с целью определения первичного сигнала; определение общего количества указанных многолучевых сигналов в каждом входном канале; определение множества задержек в указанных многолучевых сигналах; оценку амплитуд и относительных времен распространения первичного сигнала для всех входных каналов. Указанный способ реализует возможность однократного определения положения источника звука на основании анализа приходов многолучевых сигналов от нескольких приемников, но не может отслеживать изменение структуры приходов (положения источника) во времени и требует значительный объем математических вычислений.
В известной методике томографического восстановления вертикального профиля скорости звука и вектора течения в мелком море (Гончаров В.В., Иванов В.Н., Кочетов О.Ю., Курьянов Б.Ф., Серебряный А.Н. К локальной акустической томографии на морском шельфе. Доклады XXII сессия Российского акустического общества и Сессия Научного совета по акустике РАН, М., 2010, с. 225-229) используют результаты измерений времен прихода акустических импульсов между установленными на дне двумя ресиверами (обратимыми источником и приемником звука) с точной временной синхронизацией сигналами системы GPS. Запись принимаемых сигналов и первичная обработка проводится с помощью компьютера в донном блоке. Реализация метода включает последовательное излучение одиночных импульсных псевдослучайных акустических сигналов, регистрацию сигналов единого времени и прием серии импульсных сигналов, сформированных в области измерения, проведение осреднения по нескольким сериям импульсных сигналов, сформированных в области измерения путем их суммирования, измерение времен между излученным сигналом и каждым импульсом в осредненной серии сигналов, идентификацию каждого зарегистрированного импульса по максимуму корреляции измеренных и рассчитанных времен прихода. Указанная процедура повторяется для каждого последующего измерения.
Недостатками известного метода является невозможность оперативного (в реальном времени) получения данных измерения времен прихода импульсных сигналов, так как они определяются, после подъема станций и переноса данных с одноплатных компьютеров на обычные ПК. К снижению точности измерений также приводит то, что значения времен приходов отдельных импульсов усредняются, а расчет динамики во времени структуры приходов выполняется путем численного моделирования распространения акустических сигналов в соответствии со средними по пространству значениями параметров среды.
Известны системы для амплитудно-временных акустических измерений, обработки полученных данных и акустического контроля физических процессов в реальном масштабе времени, например система Smaart v.7 компании Rational Acoustics LLC (http://www.rationalacoustics.com). С помощью данной системы осуществляют, в том числе, измерение и отображение амплитудно-временных функций отклика для различных процессов. Однако измерения времен приходов отдельных импульсов можно проводить только однократно, а сопровождение во времени структуры приходов импульсов осуществляется в режиме амплитудно-временной дискриминации с отображением результатов во времени в виде спектрограммы. Система не позволяет автоматизировать сопровождение импульсных приходов во времени, выявлять и исправлять ошибочные данные и измерять структуру приходов для изменяющихся во времени функций отклика.
Известна система ScanIR для многоканального измерения амплитудно-импульсных характеристик сигналов в физике и акустике, работающая в объектно-ориентированной среде программирования Matlab (Braxton Boren, Agnieszka Roginska. Multichannel Impulse Response Measurement in Matlab / AES 131st Convention, New York, NY, USA, 2011 October 20-23, http://www.aes.org/e-lib/browse.cfm.elib=16061). Система обеспечивает несколько режимов ввода данных и позволяет измерять импульсные характеристики с помощью м-последовательностей, кодов Галлея или ЛЧМ сигналов. Визуализация результатов импульсных характеристик выполняется во временной и частотной областях. В частности, техническое применение ScanIR, реализованное для исследований функций отклика в нейрофизике, с вводом аудиосигналов через интерфейс Portaudio API в Psychtoolbox-3 (http://psychtoolbox.org) позволяет выполнять измерения времен прихода импульсных сигналов. Недостатком данной системы является отсутствие возможности автоматически выделять и измерять времена приходов отдельных максимумов в измеряемых временных импульсных характеристиках, а также отсутствие функции контроля целостности и возможности коррекции ошибочных данных.
Задача изобретения - повышение точности и автоматизация измерений амплитудно-временной функции отклика акустического канала во времени в неоднородной среде.
Техническим результатом является повышение точности измерений времен прихода импульсных сигналов за счет селективного измерения амплитудно-временных параметров импульсных сигналов во времени в неоднородной среде и автоматизация измерений путем обнаружения и исправления ошибок в принимаемых блоках данных.
Поставленная задача решается способом измерения структуры импульсной функции отклика во времени в неоднородной среде, включающим получение оцифрованных значений импульсных функций отклика hi(k) в виде потока блоков данных, расчет максимального значения функции взаимной корреляции Kcorr между соседними блоками данных в соответствии с выражением

где i - номер блока, N и k - соответственно общее количество значений и номер отсчета функции отклика канала, j - значение лага при расчете функции взаимной корреляции, поиск ошибочных блоков соответствующих критерию Kcorr<ρ, где ρ - заданный уровень статистической корреляции данных в соседних блоках, замена их на ближайшие не содержащие ошибок блоки данных, нормировку данных путем деления всех значений на максимальное значение в блоке, измерение времен прихода и амплитуд импульсных сигналов в блоках путем нахождения положения локальных максимумов в текущем блоке информации, с одновременной заменой дискретной функции отклика канала hi(k) ограниченным набором ее максимальных значений Mi(m,del)=max[hi(k)], где m - номер максимума в блоке, del - положение максимума в блоке (время прихода импульса), и сжатием объема данных в блоках, расчет двумерного евклидового расстояния Si,i+1,m по временам приходов между всеми максимумами Am,i в следующих друг за другом блоках данных согласно

и определение структуры импульсной функции отклика, путем выбора траекторий Li,i+1,m, соединяющих максимумы в соответствии с критерием минимальных значений двумерного евклидового расстояния Si,i+1,m между максимумами в соседних блоках данных

и последующим измерением времен прихода конкретных импульсных сигналов путем выборки значений времен прихода для соответствующих траекторий.
Сущность заявляемого способа иллюстрируется представленными чертежами, где на
Фиг. 1. Схема реализации предлагаемого способа;
Фиг. 2. а - графический вид отдельных блоков данных (функций отклика акустического канала h(k)), б - поток блоков данных во времени;
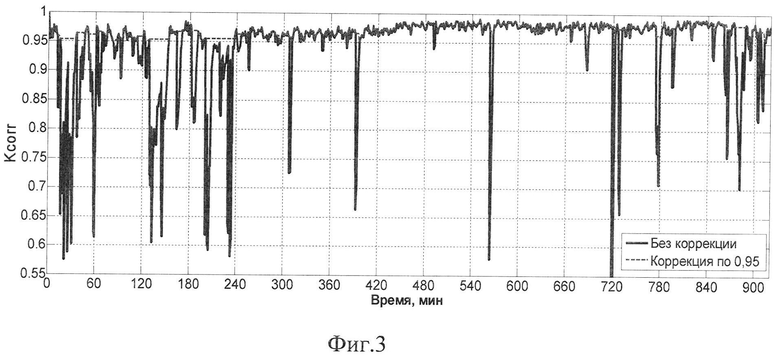
Фиг. 3. Вид зависимости коэффициента корреляции между предыдущим и последующим блоками данных для всех блоков в потоке при Kcorr>0.95;
Фиг. 4. Графический вид потока блока данных после контроля целостности и коррекции ошибок в режиме замены;
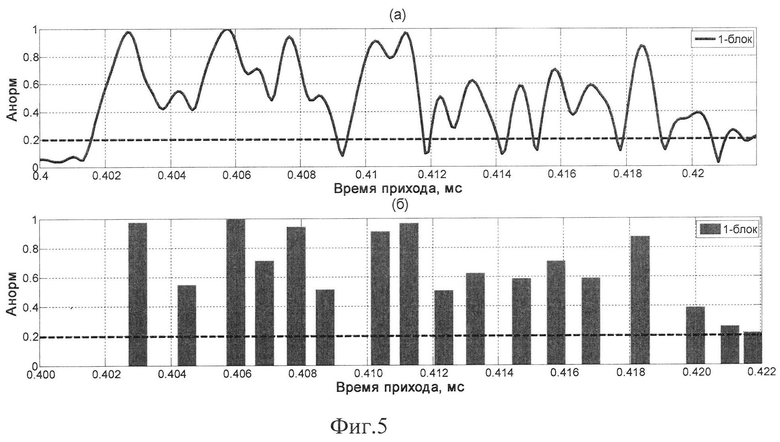
Фиг. 5. а - графическое представление данных и поиск локальных максимумов в блоке данных с заданным уровнем амплитуды; б - результат поиска локальных максимумов с заменой дискретной функции отклика канала hi(k) ограниченным набором параметров ее максимальных значений;
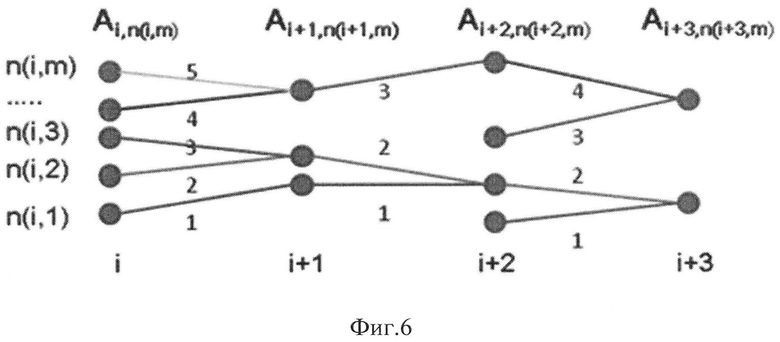
Фиг.6. Схема структуры импульсных приходов во времени в виде траекторий, соединяющих локальные максимумы амплитуд в блоках данных, по критерию минимума евклидового расстояния;
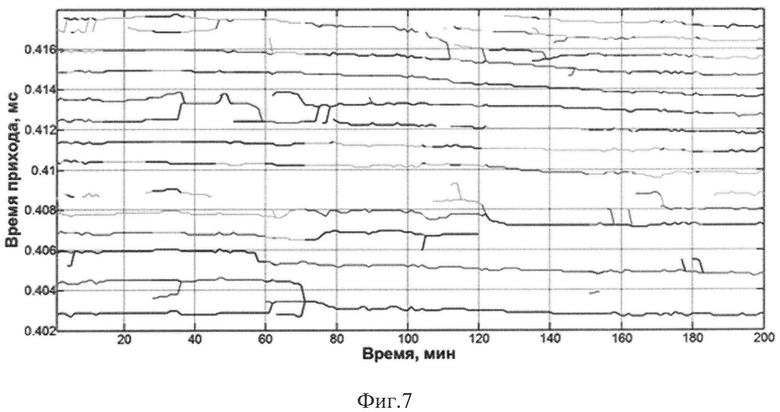
Фиг. 7. Визуализация зависимости структуры импульсных приходов во времени для потока данных в виде траекторий, соединяющих локальные максимумы амплитуд в блоках, в соответствии с критерием минимума евклидового расстояния.
Предлагаемый способ реализуется следующим образом (фиг. 1):
- последовательно получают оцифрованные значения импульсных функций отклика акустического канала hi(k) в виде потока блоков данных;
- определяют максимальные значения функции взаимной корреляции Kcorr между соседними блоками данных в соответствии с
где i - номер блока, N и k - соответственно общее количество значений и номер отсчета функции отклика канала, j - значение лага при расчете функции взаимной корреляции,
- осуществляют поиск ошибочных блоков, соответствующих критерию Kcorr<ρ, где ρ - заданный уровень корреляции данных в соседних блоках;
- заменяют ошибочные блоки на ближайшие не содержащие ошибки блоки данных - 
- нормируют цифровые значения в блоке путем деления всех значений на максимальное значение в блоке, 
- измеряют времена прихода и амплитуды импульсных сигналов в блоках путем нахождения положения локальных максимумов в текущем блоке сигнальной информации с одновременной заменой дискретной функции отклика канала 

- определяют двумерное евклидовое расстояния Si,i+1,m по временам приходов между всеми максимумами Am,i в следующих друг за другом блоках данных согласно
- выполняют выбор траекторий Li,i+1,m, соединяющих максимумы, в соответствии с критерием минимальных значений двумерного евклидового расстояния Si,i+1,m между максимумами в соседних блоках данных, причем указанный критерий обусловлен более высокой стабильностью структуры приходов акустических импульсов во времени по сравнению с высокой изменчивостью во времени их амплитуд или порядковых номеров
- и затем точно измеряют времена прихода импульсных сигналов путем выбора значений, соответствующих траекториям конкретных импульсов.
Заявляемый способ может быть реализован в приборах и технических системах, основанных на анализе амплитудно-временных характеристик импульсных акустических сигналов, распространяющихся в неоднородных средах, в частности в акустической томографии параметров водной среды и дна, акустическом мониторинге динамических процессов в водных акваториях, подводной навигации и позиционировании, неразрушающем акустическом контроле и диагностике.
Далее приведено описание реализации способа применительно к гидроакустике, конкретно, при использовании импульсного акустического зондирования для томографии водной среды и мониторинга динамических процессов в мелководных акваториях.
На фиг. 1. приведена последовательность основных действий и схема реализации способа. На первом этапе осуществляют получение данных в виде потока блока данных, выполняют поиск ошибочных блоков и коррекцию ошибочных блоков в потоке. Получение корректных первичных данных позволяет автоматизировать процесс измерений и получать значения требуемых в конкретных задачах физических величин с заданной точностью.
На фиг. 2 приведены результаты измерений амплитудно-временных характеристик принимаемых импульсных акустических сигналов, полученные при проведении эксперимента по тестированию методик томографии и мониторинга процессов в водной среде. На фиг. 2а представлены в графическом виде 1-й, 450-й и 920 цифровые блоки акустических данных, полученные соответственно в 1-ю 450-ю и 920-ю минуты эксперимента. На фиг. 2б, также в графическом виде, представлен цифровой поток данных с 1-й по 920-ю минуты эксперимента. Из вида представленных на фиг. 2 графиков следует, что имеет место как изменчивость амплитуд регистрируемых импульсов, так и вариации времен приходов различных импульсов в течение времени эксперимента. Наряду с плавными изменениями функции отклика акустического канала во времени, наблюдаются временные интервалы, на которых происходят значительные искажения функции отклика акустического канала (ФОК). Это связано с особенностью распространения импульсных сигналов в мелководных акваториях, где имеет место большое число отражений акустических волн от границ раздела фаз и присутствуют гидродинамические возмущения водной среды как природного, так и техногенного происхождения.
Для оценки степени искажения информации между соседними блоками данных рассчитывают коэффициенты корреляции Kcorr между ними по формуле (1) и определяют временные интервалы проведения коррекции в соответствии с условием Kcorr<0.95 (фиг. 3). Численное значение Kcorr, в соответствии с которым выполняют коррекцию блоков акустической информации, зависит от характеристик параметров звукового канала, гидрофизических условий окружающей среды, параметров зондирующих сигналов и специфики решаемых технических задач. На фиг. 4 представлены результаты коррекции первичных данных, приведенных на фиг. 2, по критерию 95%-й корреляции ФОК. Замена ошибочных, не соответствующих критерию блоков, проводилась на предыдущие, соответствующие критерию блоки данных, что дает возможность использовать данную методику коррекции потоковых данных акустического зондирования в режиме реального времени.
Контроль наличия ошибочных информационных блоков и их восстановление в потоке первичных данных акустического зондирования унифицирует структуру и обеспечивает непрерывность процесса получения информации о временах приходов и амплитудах импульсных сигналов в функциях отклика акустического канала и обеспечивает возможность автоматизации дальнейших измерений.
На втором этапе реализации способа измеряют времена прихода и амплитуды импульсных сигналов в блоках, путем нахождения положения локальных максимумов в текущем блоке данных (фиг. 5а) с одновременной заменой дискретной функции отклика канала hi(k) ограниченным набором ее максимальных значений Mi(m,del)=max[hi(k)], где m - номер максимума в блоке, del - положение максимума в блоке (время прихода импульса), и одновременным сжатием объема данных в блоках (фиг. 5б), причем для поиска максимумов используется алгоритм расчета с возможностью задания уровней амплитуд и количества локальных максимумов. При поиске локальных максимумов используется также ограничение на минимальные значения амплитуд. Указанное ограничение имеет физический смысл задания уровня шума в системе. Сигналы с амплитудами ниже этого уровня не рассматриваются (фиг. 5).
Применяя описанную выше процедуру к прошедшим коррекцию (фиг. 4) блокам данных, можно получить зависимости времен приходов del для амплитуд {М} и для номеров максимумов в блоках {m} в течение времени эксперимента. Однако такое представление результатов измерений не позволяет отследить изменчивость структуры распределения максимумов в виде плавных, без скачкообразных изменений по временам приходов, кривых. Амплитудная дискриминация показывает относительно стабильную и плавную структуру изменчивости во времени только одного прихода (в диапазоне 0.41-0.412 мс) и еще пяти приходов с такой же амплитудой на различных периодах времени измерений. При использовании методики «привязки» следящих фильтров к номерам максимумов в блоках для выделения и сопровождения во времени максимумов по их номерам структура приходов сохраняется на всем периоде времени измерений (за исключением одного скачка в середине второго часа измерений) для первого и второго приходов. Применение методики идентификации и сопровождения локальных максимумов амплитуд ФОК во времени по их номерам также ограничено тем, что общее количество регистрируемых локальных максимумов в ФОК значительно варьируется за время наблюдений. В рассматриваемом случае количество локальных максимумов варьируется в пределах от 9 до 20 в течение времени эксперимента.
В то же время в задачах акустической навигации и дальнометрии, томографии и мониторинга во времени процессов в неоднородных средах, при выполнении непрерывного акустического неразрушающего контроля в неоднородных средах требуется идентификация и сопровождение во времени как можно большего числа импульсов с возможностью отслеживать структурные процессы появления, объединения и исчезновения импульсов в функциях отклика в течение времени наблюдений.
Поэтому на третьем этапе реализации способа для определения траекторий, соединяющих положения локальных максимумов, рассчитывают евклидово расстояние, в соответствии с выражением (2) и используют критерий минимума этого расстояния согласно выражению (3) между максимумами в соседних по времени функциях отклика (или следующих друг за другом блоках данных). Типовая схема расчета представлена на фиг. 6. Здесь в качестве начала процесса используется i-й блок данных, в котором имеется 5 локальных максимумов. В следующем i+1 блоке имеется три локальных максимума. Расчет по выражению (2) с учетом критерия (3) позволяет определить, что 2-й и 3-й, а также 4-й и 5-й максимумы объединяются между собой, а первый локальный максимум сохраняется. При переходе к блоку данных i+2, который имеется четыре локальных максимума, происходит объединение 1-го и 2-го максимумов, 3-й максимум сохраняется. Между блоками i+2 и i+3 появляется две новых траектории 1 и 3, которые объединяются 1-я со 2-й, а 3-я с 4-ой на двух максимумах блока i+3. Непрерывность структуры приходов для рассмотренных блоков сохраняется вдоль траекторий (1, 1, 2), (2, 2, 2), (3, 2, 2), (4, 3, 4) и (5, 3, 4).
На фиг. 7 приведены результаты использования метода для структурного представления данных акустического эксперимента, результаты которого приведены на фиг. 2. Структура импульсных приходов представлена в виде непрерывных траекторий в осях, время прихода импульсов - текущее время измерений. Измерение времена приходов импульсов включает в себя идентификацию максимумов функции отклика канала и сопоставление выбранным максимумам значений времен приходов вдоль соответствующих траекторий в течение времени наблюдений.
Таким образом, предлагаемый способ измерения структуры импульсной функции отклика в неоднородных средах за счет обнаружения и исправления ошибок в принимаемых блоках данных и селективного измерения амплитудно-временных параметров импульсных сигналов позволяет в автоматическом режиме отслеживать структурные процессы появления, объединения и исчезновения импульсных приходов в функции отклика акустических каналов во времени и ввиду более высокой стабильности, непрерывности и отсутствия скачкообразных изменений более надежно и точно, чем известные способы, проводить селективные измерения амплитуд и времен приходов импульсов во времени. Способ обеспечивает непрерывность и отсутствие скачкообразных изменений в результатах измерений амплитудно-временных параметров сигналов и может применяться в автоматизированных акустических комплексах, использующих амплитудно-временные методики импульсного зондирования применительно к неоднородным средам с зависящими от времени условиями распространения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроакустическая дальномерная система навигации | 2016 |
|
RU2624980C1 |
| Устройство и способ акустических измерений множества громкоговорителей и системы направленных микрофонов | 2011 |
|
RU2616345C2 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИЗНАКОВ ИДЕНТИФИКАЦИИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СВЕРХРАЗРЕШЕНИЯ | 2015 |
|
RU2589737C1 |
| УСТРОЙСТВО, СИСТЕМА (ВАРИАНТЫ), СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О НАПРАВЛЕНИИ И КОМПЬЮТЕРНЫЙ ПРОГРАММНЫЙ ПРОДУКТ | 2011 |
|
RU2555188C2 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| МНОГОЧАСТОТНЫЙ КОРРЕЛЯЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЙ | 2022 |
|
RU2795577C1 |
| СПОСОБ ПРОСВЕТНОГО АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ ЛЕГКИХ | 2014 |
|
RU2559420C1 |
| Устройство ультразвукового контроля состояния изделий | 2016 |
|
RU2640956C1 |
| Способ оценки пространственного размера воздушной цели по частотной протяженности доплеровского портрета | 2018 |
|
RU2679396C2 |
| Корреляционный способ измерения параметров тонкой структуры водной среды | 2022 |
|
RU2799974C1 |


Использование: изобретение относится к акустике, конкретно к акустическим измерениям и цифровой обработке сигналов, и может быть использовано для измерений амплитудно-временных характеристик импульсных акустических сигналов, распространяющихся в неоднородных средах. Сущность: способ заключается в том, что результаты измерений функций отклика акустического канала, поступающие в виде потока блоков данных, последовательно в режиме реального времени проверяются по заданному критерию взаимной корреляции, определяются и заменяются ошибочные блоки данных на ближайшие проверенные блоки, определяются времена приходов импульсов в блоках путем поиска локальных максимумов, причем для поиска максимумов используется алгоритм расчета с возможностью задания уровней амплитуд и количества локальных максимумов, одновременно производится сжатие информации путем замены всех цифровых отсчетов функции отклика на значения максимумов амплитуд и их положения (времен прихода) в блоках данных, производится расчет двумерного евклидового расстояния по временам приходов между всеми максимумами в следующих друг за другом блоках данных и выбор траекторий, соединяющих максимумы в соответствии с критерием минимальных значений двумерного евклидового расстояния между максимумами в соседних блоках данных с последующим измерением времен прихода импульсных сигналов во времени путем выбора, соответствующих этим траекториям, значений времен прихода импульсов. Технический результат: повышение точности измерений времен прихода импульсных сигналов за счет обнаружения и исправления ошибок в принимаемых данных и селективного измерения амплитудно-временных параметров импульсных сигналов во времени и автоматизация способа. 7 ил.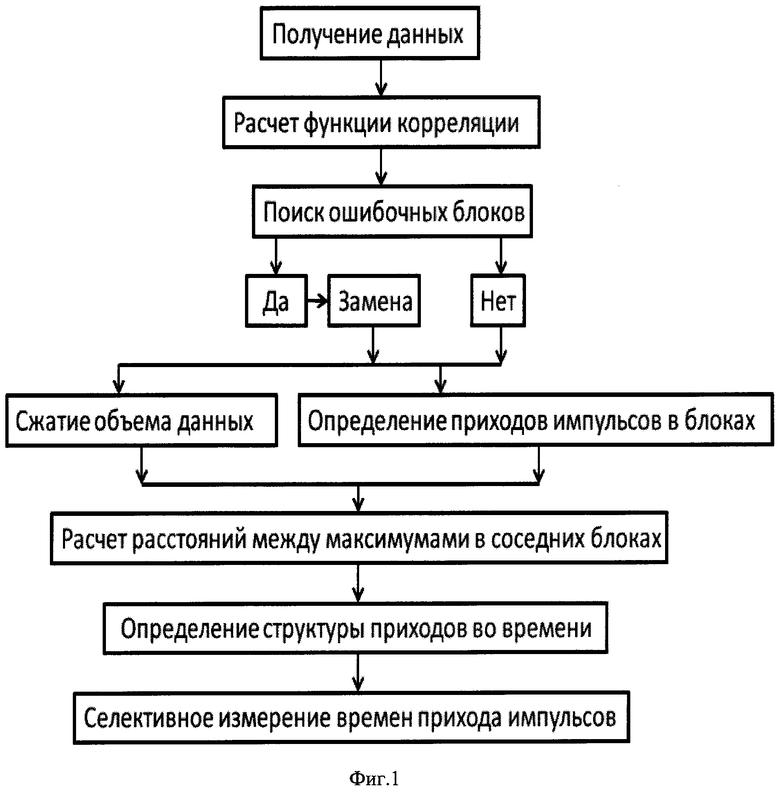
Способ измерения структуры импульсной функции отклика во времени в неоднородной среде, включающий получение оцифрованных значений импульсных функций отклика hi(k) в виде потока блоков данных, расчет максимального значения функции взаимной корреляции Kcorr между соседними блоками данных в соответствии с выражением

где i - номер блока, N и k - соответственно общее количество значений и номер отсчета функции отклика канала, j - значение лага при расчете функции взаимной корреляции, поиск ошибочных блоков, соответствующих критерию Kcorr<ρ, где ρ - заданный уровень статистической корреляции данных в соседних блоках, замена их на ближайшие, не содержащие ошибок блоки данных, нормировку путем деления всех значений на максимальное значение в блоке, измерение времен прихода и амплитуд импульсных сигналов в блоках путем нахождения положения локальных максимумов в текущем блоке сигнальной информации с одновременной заменой дискретной функции отклика канала hi(k) ограниченным набором ее максимальных значений Mi(m,del)=max[hi(k)], где m - номер максимума в блоке, del - положение максимума в блоке (время прихода импульса), и сжатием объема данных в блоках, расчет двумерного евклидового расстояния Si,i+1,m по временам приходов между всеми максимумами Am,i в следующих друг за другом блоках данных согласно

и определение структуры импульсной функции отклика путем выбора траекторий Li,i+1,m, соединяющих максимумы в соответствии с критерием минимальных значений двумерного евклидового расстояния Si,i+1,m между максимумами в соседних блоках данных

и последующее измерение времен прихода конкретных импульсных сигналов путем выборки значений времен прихода для соответствующих траекторий.
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО СЧЕТА ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU224930A1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА ЭХОСИГНАЛА (ВАРИАНТЫ) | 2001 |
|
RU2219563C2 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| US5359575 A1, 25.10.1994 | |||
| US5142507 A1, 25.08.1992 | |||
| Ферритовое свч устройство | 1972 |
|
SU447783A1 |

