Способ определения местоположения наземного подвижного объекта относится к способам автономной навигации с использованием инерциальных датчиков и может применяться для навигационного определения при пропадании сигналов спутниковых навигационных систем (СНС).
Известен способ [1], заключающийся в измерении трехосевым магнитометром проекций горизонтальной и вертикальной составляющих магнитного поля Земли (МПЗ) с последующим вычислением по ним и углам тангажа и крена, определяемым по показаниям трехосевых датчика угловой скорости (ДУС) и акселерометра, магнитного курса подвижного объекта. Недостатками способа являются невысокая точность определения курса из-за влияния аномалий МПЗ различного происхождения и, главное, отсутствие функции измерения линейной скорости объекта. Последнее исключает возможность получения его текущих географических координат.
Известен способ определения истинного курса подвижного объекта [2] по показаниям трехосевых ДУС и акселерометра без привлечения магнитометрических данных. Обладая более высокой точностью определения курса, этот способ также не предусматривает проведение линейных скоростных измерений и, как следствие, не обеспечивает текущее местоопределение объекта.
Известен способ определения местоположения подвижных наземных объектов, в частности автотранспортных средств [3], заключающийся в измерении угловой скорости и модуля линейной скорости объекта с помощью гироскопа и датчика скорости, работа которого основана на счислении оборотов колеса. Недостатками способа являются невысокая точность определения местоположения в силу низкой точности используемого датчика линейной скорости и неучет угла места объекта. Последнее не позволяет рассчитывать его текущую высоту, что ограничивает применение способа только равнинной местностью.
Наиболее близким к заявляемому способу является способ определения местоположения наземного подвижного объекта [4] в автономном режиме, при котором в отсчете от последних известных координат, полученных путем обработки сигналов спутниковых навигационных систем, измеряют параметры движения объекта и рассчитывают его географические координаты. Измерения параметров движения проводят измерителем угла поворота для определения дирекционного угла, доплеровским радиолокационным измерителем для определения радиальной скорости и акселерометром для определения угла места. По результатам измерений осуществляют расчет прямоугольных координат объекта и путем их последующего пересчета определяют местоположение наземного подвижного объекта в географической системе координат.
Недостатком способа-прототипа [4] является низкая точность определения географических координат объекта. Основными причинами этого являются:
1. Для определения текущих географических координат наземного объекта требуется знание его полной линейной (путевой) скорости. Измеряемая доплеровским радиолокатором радиальная скорость, будучи одной из ее составляющих, является грубой оценкой линейной скорости.
2. Согласно описанию прототипа, объект движется с переменной линейной скоростью (в обозначениях и по терминологии описания переменными являются отсчеты Vi-1, Vi радиальной скорости). В этом случае акселерометр, используемый в качестве инклинометра, дает низкую точность измерения угла места объекта.
Техническим результатом заявляемого способа является повышение точности определения географических координат наземного подвижного объекта.
Для получения указанного технического результата в способе определения местоположения наземного подвижного объекта в автономном режиме, при котором в отсчете от последних известных координат, полученных путем обработки сигналов спутниковых навигационных систем, измеряют параметры движения объекта и рассчитывают его географические координаты, для измерения параметров движения объекта используют трехосевой датчик угловой скорости, по данным которого определяют углы курса, места и крена, а также трехосевой акселерометр, по данным которого определяют проекции вектора путевой скорости на оси географической системы координат, полученные углы и проекции используют для определения местоположения наземного подвижного объекта.
Основными отличительными признаками заявляемого способа по сравнению с прототипом являются:
1. Использование трехосевого ДУС обеспечивает определение истинного курса, углов места и крена, дающих полное описание угловой ориентации объекта в пространстве.
В прототипе используется одноосевой измеритель угла поворота, определяющий один дирекционный (курсовой) угол объекта в горизонтальной плоскости.
2. Угол места объекта определяют по значениям элементов матрицы направляющих косинусов между географической и связанной системами координат, рассчитываемой с помощью высокоточной рекуррентной процедуры по данным ДУС. При этом точность расчета не зависит от того, с какой линейной скоростью (постоянной или переменной) движется объект.
В прототипе для определения угла места используется акселерометр, дающий низкую точность при движении объекта с переменной линейной скоростью.
3. Определяют угол крена объекта, используя рекуррентную процедуру расчета по данным ДУС, аналогичную указанной в п. 2.
В прототипе угол крена не определяют.
4. Проекции вектора путевой скорости объекта на оси географической системы координат определяют по данным трехосевого акселерометра. При этом используется процедура накапливающего суммирования значений модуля вектора линейного ускорения.
В прототипе используется грубая оценка путевой скорости в виде радиальной скорости объекта, измеряемой доплеровским радиолокатором. Дополнительными отличительными признаками являются:
1. Для снижения случайных погрешностей в проекциях модуля путевой скорости на оси географической системы координат используют процедуру «оконного» усреднения. При размере «окна» (количестве усредняемых отсчетов) М среднеквадратическое отклонение (СКО) ошибки усредненной оценки в  раз меньше СКО исходных измерительных (усредняемых) отсчетов. Так, при М=100 повышение точности составляет 10 раз.
раз меньше СКО исходных измерительных (усредняемых) отсчетов. Так, при М=100 повышение точности составляет 10 раз.
В прототипе усреднение проводится по двум соседним измерительным отсчетам (в обозначениях описания прототипа |Vi-1+Vi|/2), что соответствует повышению точности всего в  раз, что практически не существенно.
раз, что практически не существенно.
2. Реализуют одноэтапную процедуру перехода от усредненных проекций модуля путевой скорости к приращениям широты, долготы и высоты объекта.
В прототипе используется промежуточный этап расчета прямоугольных координат объекта, сопровождающийся дополнительными вычислительными ошибками.
3. В качестве модели геоида используют референц-эллипсоид.
В прототипе используется грубая модель в виде сферы.
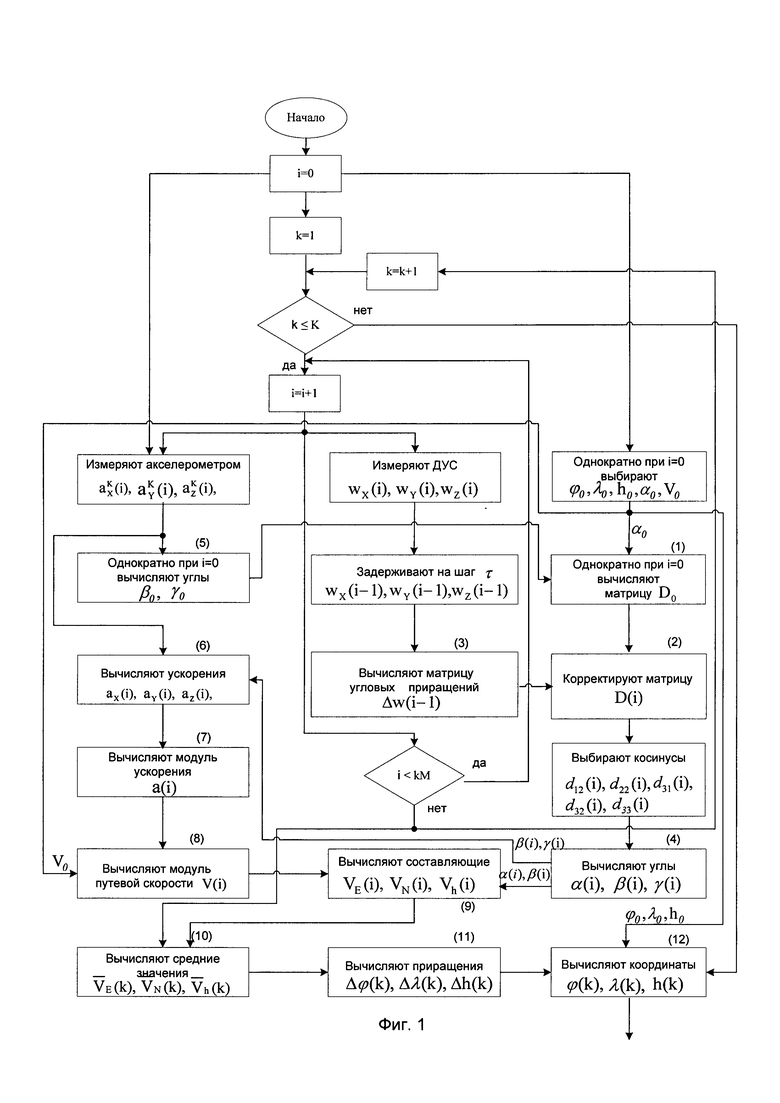
Заявляемый способ иллюстрирует Фиг. 1 - Алгоритм работы способа, где в операторах алгоритма в круглых скобках указаны номера формул, приведенных ниже.
Заявляемый способ заключается в следующем.
В момент пропадания сигналов спутниковых навигационных систем запоминают последние полученные модулем СНС объекта географические координаты: широту ϕ0, долготу λ0, высоту h0, а также путевой (курсовой) угол α0 и путевую скорость V0. Дальнейшие действия выполняют с использованием двух систем координат:
а) Географическая система координат (СК) OENh с началом в центре масс объекта. Оси ОЕ, ON лежат в плоскости местного горизонта (ПМГ), ось ОЕ направлена на географический восток, ось ON - на географический север (полюс). Ось Oh совпадает с местной вертикалью и направлена вверх.
б) Связанная СК OXYZ с тем же началом. Оси OX, OY совпадают с поперечной и продольной строительными осями объекта. Ось OZ перпендикулярна этим осям (вертикальная ось). При нулевых углах места (тангажа) β и крена γ объекта оси OX, OY лежат в ПМГ, ось OZ перпендикулярна ей и направлена вверх. Ось OY совпадает с направлением движения объекта. Ориентация оси OY относительно СК OENh определяет истинный курс подвижного объекта α и его угол места β. Оси чувствительности соосных акселерометра и ДУС совпадают с осями СК OXYZ.
Взаимная ориентация систем координат определяется матрицей направляющих косинусов:

При угловом движении (вращении) объекта значения матрицы D в соседние дискретные моменты времени связаны рекуррентным уравнением:

где матрица угловых парциальных приращений Δw(i) равна:
Здесь wX(i), wY(i), wZ(i) - фиксируемые измерительными осями ДУС проекции вектора угловой скорости объекта; τ - шаг по времени, определяемый частотой F выдачи данных измерительными датчиками (в данном случае ДУС). (В (2) принято допущение о пренебрежимо малом влиянии угловой скорости вращения Земли).
Последовательно решая уравнение (2), по текущим значениям элементов матрицы D(i) определяют угловые параметры движения объекта:

Начальное значение матрицы D0 в (2) рассчитывают по курсовому углу α0 в момент t0 пропадания сигналов СНС и значениям углов тангажа и крена объекта:

где аX0, aY0, aZ0 - проекции вектора ускорения силы тяжести g, фиксируемые измерительными осями акселерометра в этот момент времени. Соотношения (5) строго справедливы, если в момент t0 объект неподвижен или движется равномерно. В противном случае (5) дают приближенную оценку углов β0, γ0.
Одновременно по измеряемым акселерометром проекциям 

 вектора кажущегося линейного ускорения объекта с использованием углов β(i), γ(i) формируют истинные ускорения:
вектора кажущегося линейного ускорения объекта с использованием углов β(i), γ(i) формируют истинные ускорения:

с помощью которых рассчитывают модуль истинного линейного ускорения:

Это значение поступает в процедуру накапливающего суммирования:

где V0 - путевая скорость в момент t0.
В результате формируется последовательность текущих значений модуля путевой скорости объекта V(i), которая раскладывается на восточную VE, северную VN и высотную Vh составляющие:

Для снижения случайных погрешностей составляющих, вызванных ошибками определения скорости V(i) и углов α(i), β(i), предусмотрена процедура «оконного» усреднения и сжатия последовательностей VE(i), VN(i),Vh(i):

k=1,2, …, K,
где  - средние в k-м «окне» значения составляющих.
- средние в k-м «окне» значения составляющих.
Размер «окна» (количество усредняемых отсчетов) М определяется временным интервалом усреднения Т, задаваемым исходя из динамики движения наземного объекта. При этом М=Т/τ, где τ - шаг выдачи данных измерительными датчиками. Значение k=K соответствует окончанию маршрута движения объекта.
Одновременно этим решают задачу уменьшения темпа поступления результатов потребителю (наземному подвижному объекту), для которого частота F выдачи данных датчиками в большинстве случаев избыточна.
По средним значениям составляющих рассчитывают приращения широты Δϕ(k), долготы Δλ (k) и высоты Δh (k) объекта:

где ϕ(k-1) - широта объекта на предыдущем шаге; е - полярное сжатие референц-эллипсоида, принятого в качестве модели геоида; R - расстояние от центра референц-эллипсоида до точки, в которой находится объект (вычисляется по принятой модели).
В результате текущие географические координаты наземного подвижного объекта рассчитывают по формулам:

Рассмотрим возможность технической реализации заявляемого способа.
В качестве соосных трехосевых ДУС и акселерометра может использоваться инерциальный МЭМС-датчик ADIS 16495 BLMZ-1 производства компании Analog Device. Он также содержит встроенный датчик температуры, необходимый для реализованной в инерциальном датчике температурной самокалибровки. Этим обеспечивается высокая точность измерения угловых скоростей и линейных ускорений объекта установки инерциального датчика.
Вычислитель, реализующий алгоритм работы способа (см. Фиг. 1), может строиться с использованием СнК (системы-на кристалле) SmartFusion2, включающей энергонезависимую матрицу ПЛИС, выполненную по Flash-технологии, и полноценную процессорную подсистему на базе процессора ARM Cortex М3.
В качестве модуля СНС, формирующего начальные (для заявляемого способа) географические координаты (ϕ0, λ0, h0, а также путевые угол α0 и скорость V0 объекта, может использоваться многоканальный навигационный приемник МНП-М7 производства АО «Ижевский радиозавод».
Таким образом, заявляемый способ может быть реализован и обеспечивает повышение точности определения местоположения наземного подвижного объекта в автономном режиме.
Источники информации
1. Патент RU 2629539. Способ измерения магнитного курса подвижного объекта. - Опубликовано: 29.08.2017. Бюл. №25.
2. Заявка на изобретение RU 2017136344 от 13.10.2017. Способ определения истинного курса подвижного объекта.
3. Ашимихин А.В., Козьмин В.А., Крыжко И.Б. Интегрированная навигационная система для мобильной станции радиоконтроля// Специальная техника. 2008. №5-6.
4. Патент RU 2445576. Способ определения местоположения наземных подвижных объектов. - Опубликовано: 20.03.2012. Бюл. №8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2744772C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2017 |
|
RU2671937C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
Изобретение относится к способам автономной навигации с использованием инерциальных датчиков, обеспечивающим непрерывное навигационное определение при пропадании сигналов спутниковых навигационных систем (СНС). Технический результат - повышение точности определения географических координат наземного подвижного объекта. Для этого в способе, при котором осуществляют отсчет от последних координат, полученных путем обработки сигналов СНС, измеряют параметры движения объекта и рассчитывают его географические координаты. Измерения проводят с использованием трехосевого датчика угловой скорости, по данным которого определяют углы курса, места и крена, а также трехосевого акселерометра, по данным которого определяют проекции вектора путевой скорости на оси географической системы координат. Полученные углы и проекции используют для определения местоположения наземного подвижного объекта. 1 ил.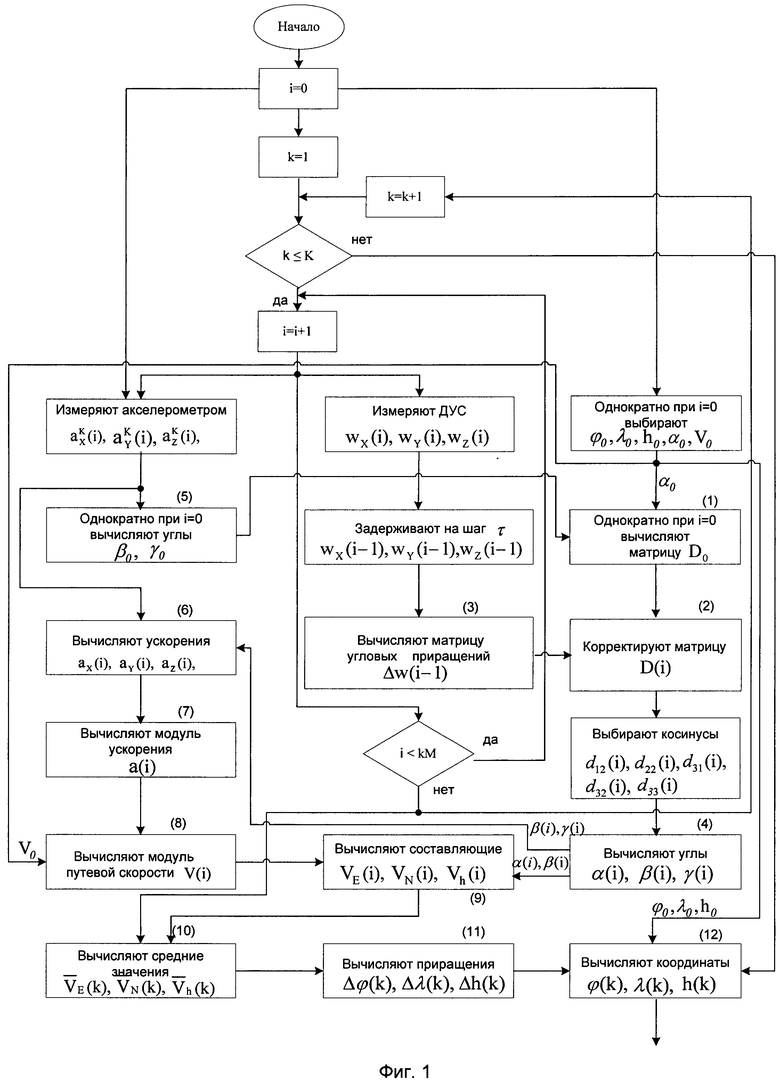
Способ определения местоположения наземного подвижного объекта в автономном режиме, при котором в отсчете от последних известных координат, полученных путем обработки сигналов спутниковых навигационных систем, измеряют параметры движения объекта и рассчитывают его географические координаты, отличающийся тем, что для измерения параметров движения объекта используют трехосевой датчик угловой скорости, по данным которого определяют углы курса, места и крена, а также трехосевой акселерометр, по данным которого и полученным углам курса и места определяют проекции вектора путевой скорости на оси географической системы координат, полученные проекции используют для определения местоположения наземного подвижного объекта, при этом по измеряемым акселерометром проекциям  ,
,  ,
,  , i=1, 2… вектора кажущегося линейного ускорения объекта с использованием углов места β(i) и крена объекта γ(i) формируют истинные ускорения:
, i=1, 2… вектора кажущегося линейного ускорения объекта с использованием углов места β(i) и крена объекта γ(i) формируют истинные ускорения:
 ,
,  ,
,
 ,
,
где g - ускорение силы тяжести, с помощью которых рассчитывают модуль истинного линейного ускорения  , по значениям указанного модуля при помощи процедуры накапливающего суммирования
, по значениям указанного модуля при помощи процедуры накапливающего суммирования  , где V0 - путевая скорость в момент пропадания сигналов спутниковых навигационных систем; τ - временной шаг выдачи данных акселерометром, рассчитывают последовательность текущих значений модуля путевой скорости V(i), которую с использованием углов курса α(i) и места раскладывают на восточную VE(i)=V(i)sinα(i)cosβ(i), северную VN(i)=V(i)cosα(i)cosβ(i) и высотную Vh(i)=V(i)sinβ(i) составляющие (проекции), для снижения случайных погрешностей указанных составляющих используют процедуру «оконного» усреднения последовательностей VE(i), VN(i),Vh(i):
, где V0 - путевая скорость в момент пропадания сигналов спутниковых навигационных систем; τ - временной шаг выдачи данных акселерометром, рассчитывают последовательность текущих значений модуля путевой скорости V(i), которую с использованием углов курса α(i) и места раскладывают на восточную VE(i)=V(i)sinα(i)cosβ(i), северную VN(i)=V(i)cosα(i)cosβ(i) и высотную Vh(i)=V(i)sinβ(i) составляющие (проекции), для снижения случайных погрешностей указанных составляющих используют процедуру «оконного» усреднения последовательностей VE(i), VN(i),Vh(i):
 ,
,  ,
,  ,
,
k=1, 2, …, K,
где  ,
,  ,
,  - средние в k-м «окне» значения составляющих; М - размер «окна» (количество усредняемых отсчетов), определяемый временным интервалом усреднения Т, задаваемый исходя из динамики движения наземного объекта; K - количество «окон» на момент окончания маршрута движения объекта, по средним значениям составляющих рассчитывают приращения широты Δϕ(k), долготы Δλ(k) и высоты Δh(k) объекта:
- средние в k-м «окне» значения составляющих; М - размер «окна» (количество усредняемых отсчетов), определяемый временным интервалом усреднения Т, задаваемый исходя из динамики движения наземного объекта; K - количество «окон» на момент окончания маршрута движения объекта, по средним значениям составляющих рассчитывают приращения широты Δϕ(k), долготы Δλ(k) и высоты Δh(k) объекта:
 ,
,  ,
,
 ,
,
где ϕ(k-1) - широта объекта на предыдущем шаге; е - полярное сжатие референц-эллипсоида, принятого в качестве модели геоида; R - расстояние от центра референц-эллипсоида до точки нахождения объекта, по значениям указанных приращений текущие географические координаты наземного подвижного объекта рассчитывают по формулам:
где ϕ0, λ0, h0 - соответственно широта, долгота и высота объекта в момент пропадания сигналов спутниковых навигационных систем.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2445576C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| US 5237952 A, 24.08.1993 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2202102C2 |
| ЯЦЕНКОВ В.С | |||
| ОСНОВЫ СПУТНИКОВОЙ НАВИГАЦИИ | |||
| СИСТЕМЫ GPS NAVSTAR И ГЛОНАСС | |||
| - М., 2005 | |||
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |

