Изобретение относится к строительству подводных аппаратов и может быть использовано при выполнении подводных буровых работ.
Известна функциональная структура подводного аппарата (см. Патент UA №26179), включающая крепкие корпуса, расположенные на раме легкого корпуса, в которой размещены главные балластные цистерны и рулевой корпус, установленный в корме, которая имеет гребные винты с приводами, связанные с энергетической установкой. На раме закреплены носовые телекамеры, светильники, манипуляторы, носовое грузозахватное устройство, в виде грейфера с лапами, размещенными на оси, соединенной через подшипники с рамой и установленной в носовой части подводного аппарата, рычагами, соединенными с рабочими понтонами, расположенными по правому и левому бортам подводного аппарата. Рабочие понтоны разделены упругой мембраной на верхнюю и нижнюю полости, причем в верхней полости, выполненной в виде лейки, размещены элементы позитивной плавучести, а нижние полости соединены через кингстоны забортной водой и гибкими шлангами через ресивер - между собой. Верхние полости понтонов связаны гибкими шлангами с верхней полостью контейнера, который содержит элементы позитивной плавучести, причем контейнер оборудован упругой мембраной, а нижняя полость через насос и кингстон соединена с забортной водой, причем гибкие шланги поставлены с управляемыми клапанами. Подводный аппарат дополнительно поставлен с кормовым грузозахватным устройством в виде грейфера с лапами, размещенными на оси, соединенной через подшипники с рамой и установленной в кормовой части подводного аппарата, рычагами, соединенными с рабочими понтонами, расположенными по правому и левому бортам подводного аппарата. Рабочие понтоны носового и кормового грузозахватных устройств, соединенные между собой, имеют общую внутреннюю полость, а также дополнительно установлены кормовые телекамеры, светильники и манипуляторы (прототип).
Известное устройство имеет технологические возможности, которые заключаются в том, что подводный аппарат для выполнения над донной поверхностью морей и океанов может быть опущен на конкретную глубину водного пространства.
Недостатком известного технологического решения является то, что, с одной стороны, для опускания на конкретную глубину водного пространства используют забортную воду, которой заполняют рабочие понтоны, и такая процедура не позволяет существенно увеличить глубину погружения в морях и океанах. С другой стороны, в подводном аппарате отсутствуют технологические устройства длительной фиксации подводного аппарата на донной поверхности для выполнения различных технологических действий, как на донной поверхности, так и на ее глубине.
Технологическим результатом предложенного изобретения является существенное увеличение глубины погружения в морях и океанах и возможность фиксации подводного аппарата на донной поверхности.
Указанный технологический результат достигается следующим способом.
Способ удержания подводных буровых систем над донной поверхностью морей и океанов, включающий изготовление общего корпуса с различными робототехническими устройствами и отдельных элементов полых сосудов сферической формы, гребных финтов, который функционально соединяют с приводом для формирования движущей силы, при этом общий корпус с различными робототехническими устройствами выполняют тороидальной формы, в нижней боковой части которого равномерно по кругу фиксируют полые сосуды сферической формы, при этом гребные винты выполняют спиралевидной формы, один конец которых с возможностью разворота в вертикальной плоскости функционально соединяют с редуктором привода, который герметично фиксируют внутри полых сосудов сферической формы, которые выполняют с отверстием в нижней части, соосно которым позиционно располагают верхнюю часть оси штопора и ее функционально соединяют с редуктором дополнительного привода, который закрепляют также внутри полых сосудов сферической формы и после погружения в воду их заполняют маслом.
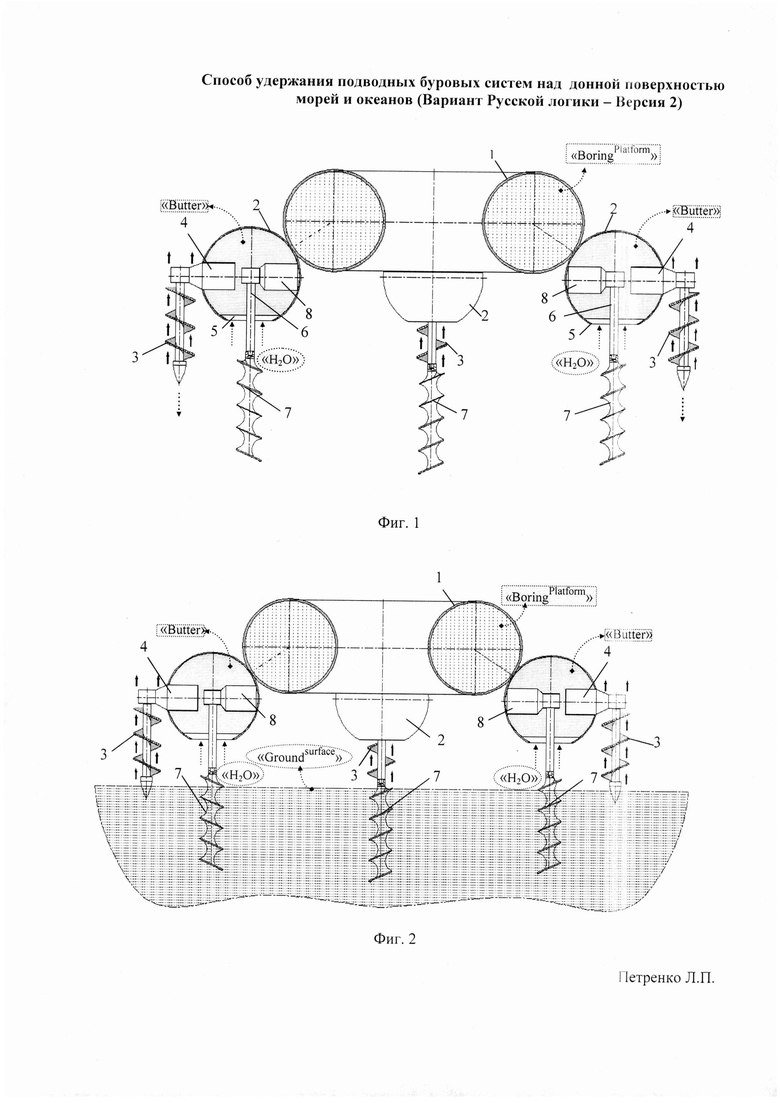
На фиг. 1 и 2 изображена схемная реализация предложенного способа удержания подводных буровых систем над донной поверхностью «Groundsurface» морей и океанов, и она включает общий корпус 1 с различными робототехническими устройствами тороидальной формы, который выполняет функцию буровой платформы «BoringPlatform», в нижней боковой части которого равномерно по кругу зафиксированы полые сосуды сферической формы 2, при этом гребные винты 3 выполняют спиралевидной формы и при перемещении подводной буровой системы в направлении донной поверхностью «Groundsurface» морей и океанов ориентированы вертикально вниз для компенсации положительной плавучести общего корпуса 1 и полых сосудов сферической формы 2. При этом один конец гребных винтов спиралевидной формы 3 с возможностью разворота в вертикальной плоскости функционально соединяют с редуктором привода 4, который герметично фиксируют внутри полых сосудов сферической формы 2, которые выполняют с отверстием 5 в нижней части, соосно которым позиционно располагают верхнюю часть оси 6 штопора 7 и ее функционально соединяют с редуктором дополнительного привода 8, который закрепляют также внутри полых сосудов сферической формы 2 и после погружения в воду «H2O» их заполняют маслом «Butter» для исключения попадания воды с минимизированной проводимостью в энергетические системы приводов 4 и 8 на больших глубинах морей и океанов.
Реализуют способ удержания подводных буровых систем над донной поверхностью морей и океанов.
После изготовления подводной буровой системы с общим корпусом 1 тороидальной формы с различными робототехническими устройствами для выполнения буровых работ и с полыми сосудами сферической формы 2, внутри которых герметично зафиксированы привод 4 с редуктором, который функционально соединен со спиралевидным винтом 3, а также дополнительный привод 8 с редуктором, который функционально соединен со штопором 7 для последующей фиксацией с донной поверхностью «Groundsurface». Всю буровую систему опускают в воду «H2O», после чего общий корпус 1 и полые сосуды 2 заполняют маслом «Butter», нижняя поверхность которого посредством отверстия 5 и соответствующих отверстий в нижней части общего корпуса 1 непосредственно контактирует с водной поверхностью «H2O» и это необходимо, для того чтобы на больших глубинах морей и океанов, с одной стороны, вода с низкой проводимостью не могла попасть в позиционное положение энергетических устройств различных приводов 4 и 8. С другой стороны, функциональная связь масла «Butter» и воды «H2O» позволяет существенно снизить требования к жесткости общего корпуса 1 и полых сосудов 2 на больших глубинах, поскольку с внутренней и внешней сторон их поверхности давление соизмеримо. А если учесть, что масло «Butter» по сравнению с водой «H2O» имеет положительную плавучесть, то для ее компенсации спиралевидные винты 3 разворачивают вертикально вниз и посредством приводов 4 компенсируют ее. В результате подводная буровая система с общим корпусом 1 может быть опущена на достаточно большую глубину, а если учесть, что штопоры 7 ввинчиваются в донную поверхность «Groundsurface» морей и океанов, то подводная буровая система может находиться над донной поверхностью длительное время для выполнения конкретной задачи. При этом следует отметить, что буровая система с общим корпусом 1 может быть перемещена в другое позиционное положение над донной поверхностью «Groundsurface» морей и океанов и для этого выполняют вывинчивание штопоров 7. И часть спиралевидных винтов 3 разворачивают в горизонтальном направлении и выполняют изменение позиционного положения буровой системы над донной поверхностью «Groundsurface» морей и океанов для последующего выполнения буровых работ.
Использование изобретения позволяет путем спиралевидных гребных винтов компенсировать положительную плавучесть подводной буровой системы, и появляется возможность опустить ее на значительную глубину и зафиксировать ее посредством штопоров над донной поверхностью на длительное время для выполнения конкретной задачи бурения над донной поверхностью «Groundsurface» морей и океанов.
Изобретение относится к области судостроения и может быть использовано при выполнении подводных буровых работ. Предложен способ удержания подводных буровых систем над донной поверхностью морей и океанов, согласно которому общий корпус с различными робототехническими устройствами выполняют тороидальной формы, в нижней боковой части которого равномерно по кругу фиксируют полые сосуды сферической формы, при этом гребные винты выполняют спиралевидной формы, один конец которых с возможностью разворота в вертикальной плоскости функционально соединяют с редуктором привода, который герметично фиксируют внутри полых сосудов сферической формы, которые выполняют с отверстием в нижней части, соосно которому позиционно располагают верхнюю часть оси штопора и ее функционально соединяют с редуктором дополнительного привода, который закрепляют также внутри полых сосудов сферической формы и после погружения в воду их заполняют маслом. Технический результат заключается в улучшении эксплуатационных характеристик подводной системы. 2 ил.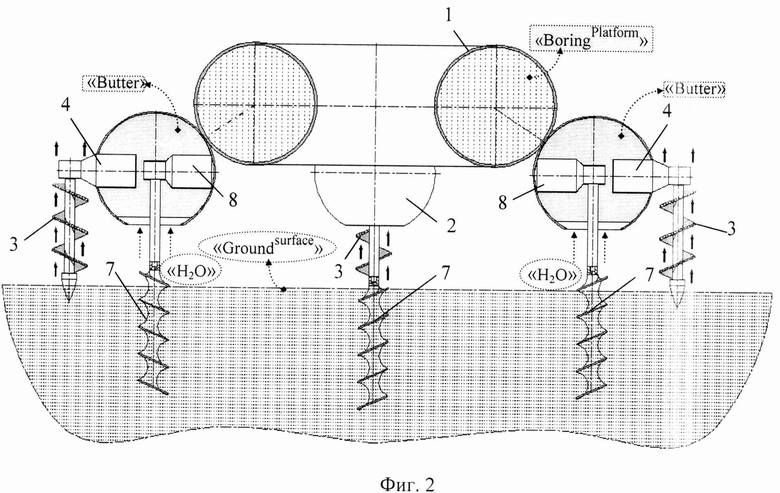
Способ удержания подводных буровых систем над донной поверхностью морей и океанов, включающий изготовление общего корпуса с различными робототехническими устройствами и отдельных элементов полых сосудов сферической формы, гребных винтов, которые функционально соединяют с приводом для формирования движущей силы, отличающийся тем, что общий корпус с различными робототехническими устройствами выполняют тороидальной формы, в нижней боковой части которого равномерно по кругу фиксируют полые сосуды сферической формы, при этом гребные винты выполняют спиралевидной формы, один конец которых с возможностью разворота в вертикальной плоскости функционально соединяют с редуктором привода, который герметично фиксируют внутри полых сосудов сферической формы, которые выполняют с отверстием в нижней части, соосно которому позиционно располагают верхнюю часть оси штопора и ее функционально соединяют с редуктором дополнительного привода, который закрепляют также внутри полых сосудов сферической формы, и после погружения в воду их заполняют маслом.
| US 2013223938 A1, 29.08.2013 | |||
| ПОДВОДНАЯ ПЛАТФОРМА | 2000 |
|
RU2182212C2 |
| ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2356780C1 |
| WO 2013140421 A1, 26.09.2013 | |||
| WO 8601556 A1, 13.03.1986. | |||

