Изобретение относится к сельскому хозяйству, в частности к фермам, может быть использовано для транспортировки и заливки воды на фермы.
Известна четырехосная железнодорожная цистерна для перевозки воды, модель 15-1639-01 (http://www.fraht-vagon.ru) производства ОАО «МЗТМ» (http://www.metallurgmash.ru/). Год постановки на серийное производство 1996. Полный объем котла составляет 30,52 м3. Используется верхний способ налива, нижний способ слива самотеком, стояночный тормоз, теплоизоляция цистерны, конструкционная скорость вагона 120 км/ч.
Недостатком указанного вагона-цистерны является невозможность автономного передвижения по заданным маршрутам с выполнением автоматической заливки.
Наиболее близким по технической сущности к предлагаемому изобретению является автоцистерна для питьевой воды НГФА3-66064-62, предназначенная для транспортировки и кратковременного хранения питьевой воды (http://www.nefaz.ru/production_detail-55.html)
Недостатками прототипа является меньший объем транспортируемой воды, отсутствие возможности перемещения по железной дороге, автоматической работы, удаленного управления.
Задачей изобретения является создание электроробота-водовоза и автоматизированной системы управления данным роботом.
Предлагаемый электроробот-водовоз для заливки воды в баки на фермах содержит цистерну, двигатель, люк с автоматическим люкозатворным механизмом, насос, датчик уровня воды в баке, электрифицированную платформу, кабину, пантограф для питания электроробота-водовоза по контактной сети постоянного тока, манипулятор со шлангом для слива воды в бак, две веб-камеры внешнего вида с адаптером, две веб-камеры для контроля работы манипулятора, wi-fi передатчик для связи с центром управления, систему управления с микроконтроллером, блоком синхронизации для контроля места остановки электроробота-водовоза, регулятором скорости и блоком диагностики электрических и механических узлов, при этом первый вход микроконтроллера соединен через wi-fi передатчиком, две веб-камеры внешнего вида через адаптер соединены со вторым входом микроконтроллера, две веб-камеры слежения за работой манипулятора соединены с третьим входом микроконтроллера, блок синхронизации соединен с четвертым входом микроконтроллера, двигатель через регулятор скорости связан с пятым входом микроконтроллера, манипулятор соединен с шестым входом микроконтроллера, насос соединен с седьмым входом микроконтроллера робота, датчик уровня воды в баке соединен с восьмым входом микроконтроллера, блок диагностики соединен с девятым входом микроконтроллера.
Сущность предлагаемого изобретения поясняется чертежами.
На фиг. 1 представлена общая схема электроробота водовоза.
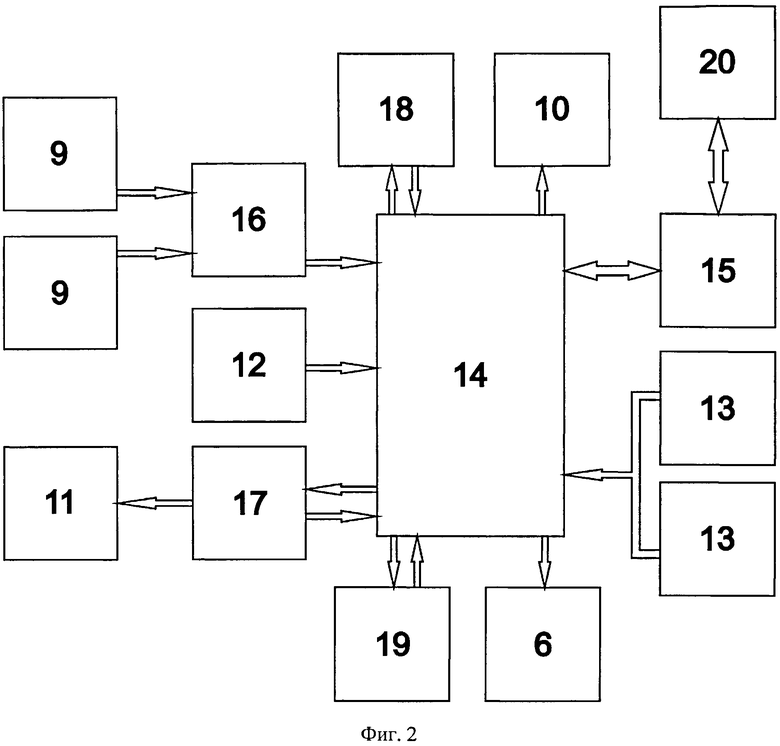
На фиг. 2 представлена система управления электророботом-водовозом.
Электроробот-водовоз содержит панель управления 1, кабину 2, пантограф 3, люк 4, люкозатворный механизм 5, манипулятор 6, цистерну 7, ж/д платформу 8, веб-камеры внешнего вида 9, насос 10, электродвигатель водовоза 11, датчик уровня воды 12, веб-камеры контроля работы манипулятора 13, микроконтроллер робота 14, wi-fi передатчик 15, адаптер 16, регулятор скорости 17, блок диагностики 18, блок синхронизации 19, ЦУП 20.
Первый вход микроконтроллера робота 14 соединен через wi-fi передатчик 15 с ЦУПом 20, две веб-камеры внешнего вида 9 через адаптер 16 соединены со вторым входом микроконтроллера 14, две веб-камеры слежения за работой манипулятора 13 соединены с третьим входом микроконтроллера 14, блок синхронизации 19 соединен с четвертым входом микроконтроллера 14, двигатель 11 через регулятор скорости 17 связан с пятым входом микроконтроллера 14, манипулятор 6 соединен с шестым входом микроконтроллера 14, насос 10 соединен с седьмым входом микроконтроллера робота, датчик уровня воды 12 соединен с восьмым входом микроконтроллера 14, блок диагностики 18 соединен с девятым входом микроконтроллера 14.
Работает электроробот-водовоз следующим образом.
Питание электроробота-водовоза происходит по контрактной сети постоянного тока при помощи пантографа 3. На микроконтроллер робота 14 через wi-fi передатчик 15 приходит команда из ЦУПа 20, подается сигнал на блок диагностики 18 для проверки всех механических и электрических узлов; поступает сигнал о местонахождении фермы; из микроконтроллера робота 14 подается сигнал на регулятор скорости 17, затем на электродвигатель 11, начинается движение до фермы; скорость движения робота контролируется и изменяется с помощью регулятора скорости 17; сигнал, поступающий с передней веб-камеры 9, преобразуется в адаптере 16, затем поступает на микроконтроллер 14; при приближении к ферме передняя веб-камера 9 считывает метки, и на регулятор скорости 17 подается сигнал о замедлении скорости и остановке возле отмеченного места, которое определяется при помощи передней веб-камеры 9 и контролируется блоком синхронизации 19, происходит стыковка с фермой; на манипулятор 6 из микроконтроллера 14 приходит сигнал о начале работы; после того, как манипулятор 6 принял рабочее положение, с датчика уровня воды 12 на микроконтроллер 14 приходит сигнал о наличии в баке воды; при отсутствии в баке воды из микроконтроллера 14 подается сигнал на насос 10; с датчика уровня воды 12 приходит сигнал о заполнении бака, насос 10 прекращает работу; из микроконтроллера на манипулятор 6 приходит сигнал о завершении работы и принятии первичного положения; робот начинает движение к следующей ферме. При отключении автоматического режима управление переходит оператору в ЦУП. Информацию о передвижении робота оператор получает с помощью двух веб-камер внешнего вида 9; информацию о работе манипулятора получает с помощью двух веб-камер контроля работы манипулятора 13.
Изобретение относится к сельскому хозяйству и может быть использовано для транспортировки и заливки воды в баки на фермы. Технический результат - повышение скорости доставки воды на фермы. Электроробот-водовоз содержит цистерну, двигатель, люк с автоматическим люкозатворным механизмом, насос, датчик уровня воды в баке, электрифицированную платформу, кабину. Также он содержит пантограф для питания электроробота-водовоза по контактной сети постоянного тока, манипулятор со шлангом для слива воды в бак, две веб-камеры внешнего вида с адаптером, две веб-камеры для контроля работы манипулятора, wi-fi передатчик для связи с центром управления и систему управления. Система управления содержит микроконтроллер, блок синхронизации для контроля места остановки электроробота-водовоза, регулятор скорости и блок диагностики электрических и механических узлов. 2 ил.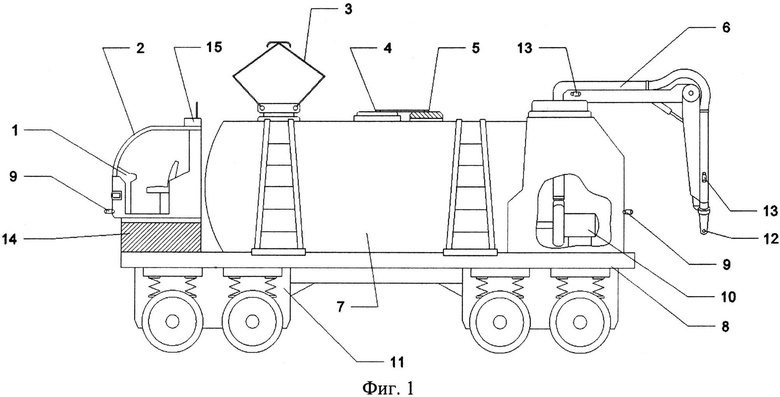
Электроробот-водовоз для заливки воды в баки на фермах, содержащий цистерну, двигатель, люк с автоматическим люкозатворным механизмом, насос, датчик уровня воды в баке, электрифицированную платформу, кабину, пантограф для питания электроробота-водовоза по контактной сети постоянного тока, манипулятор со шлангом для слива воды в бак, две веб-камеры внешнего вида с адаптером, две веб-камеры для контроля работы манипулятора, wi-fi передатчик для связи с центром управления, систему управления с микроконтроллером, блоком синхронизации для контроля места остановки электроробота-водовоза, регулятором скорости и блоком диагностики электрических и механических узлов, при этом первый вход микроконтроллера соединен с wi-fi передатчиком, две веб-камеры внешнего вида через адаптер соединены со вторым входом микроконтроллера, две веб-камеры слежения за работой манипулятора соединены с третьим входом микроконтроллера, блок синхронизации соединен с четвертым входом микроконтроллера, двигатель через регулятор скорости связан с пятым входом микроконтроллера, манипулятор соединен с шестым входом микроконтроллера, насос соединен с седьмым входом микроконтроллера робота, датчик уровня воды в баке соединен с восьмым входом микроконтроллера, блок диагностики соединен с девятым входом микроконтроллера.
| МОБИЛЬНЫЙ РОБОТ С ЗАПРАВОЧНОЙ СТАНЦИЕЙ ДЛЯ ЗАПРАВКИ ЖИДКОСТЬЮ И СПОСОБ ЗАПРАВКИ ЖИДКОСТЬЮ | 2006 |
|
RU2344030C2 |
| Автомобильная цистерна | 1983 |
|
SU1087382A1 |
| US5219264 A, 15.06.1993 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

