Изобретение относится к радиолокации и может быть применено для измерения пространственных координат цели, включая высоту цели, при использовании двухкоординатных радиолокационных станций (РЛС), определяющих пеленг и дистанцию до цели, объединенных в многопозиционную систему РЛС.
Известны способы определения координат цели с применением трехкоординатных обзорных РЛС [1]. В данном типе РЛС обзор пространства обеспечивается механическим вращением антенной системы, которая образует V-образную диаграмму направленности, состоящую из двух лучей, один из которых расположен в вертикальной плоскости, а другой - в плоскости, расположенной под углом 45° к вертикальной. Каждая диаграмма направленности, в свою очередь, формируется двумя лучами, образованными на разных несущих частотах и имеющими ортогональную поляризацию. В многолучевых трехкоординатных РЛС трехмерный обзор пространства выполняется с помощью расположенного в вертикальной плоскости под фиксированными углами места пучка иглообразных лучей, непрерывно совместно вращающихся по азимуту.
Известен также интерферометрический фазовый метод измерения угла места в каждом разрешаемом по дальности и азимуту элементе [2, с. 349-353]. Однако он требует специальной антенной системы - интерферометра. Известны также амплитудный и амплитудно-фазовый моноимпульсный методы измерения угла места с помощью пеленгационной характеристики [3, с. 424-428], получаемой при смещении луча РЛС. Однако все эти способы предполагают использование сложных трехкоординатных РЛС либо наличие фазированных антенных решеток.
Наиболее близким по технической сущности способ определения пространственных координат цели описан в [4]. Этот способ, выбранный в качестве прототипа, описывает определение угла места цели, основанный на использовании двух антенн в вертикальной плоскости, расположенных на разной высоте. Обе антенны имеют идентичные диаграммы направленности и одинаковую ориентацию по углу места. Сущность способа заключается в том, что расстояние между антеннами в процессе пеленгации низколетящих целей регулируется так, чтобы, с одной стороны, разность фаз между сигналами от антипода, принимаемыми двумя антеннами, равнялась π, а с другой - разность фаз между сигналами, отраженными от цели, была отлична от π. В зависимости от амплитуды и фазы сигналов (от цели и антипода), принятых антеннами, формируются сигналы управления сдвигом фазы сигнала (от цели и антипода) и разнесением антенн по высоте. Рассмотренный способ достаточно сложен в конструктивном отношении.
Цель изобретения - возможность применения существующих двухкоординатных РЛС, входящих в состав многопозиционной системы РЛС, в качестве источника трехмерных координат. Технический результат направлен на увеличение точности измерения пространственных координат цели при использовании двухкоординатных РЛС, объединенных в систему.
Предлагается способ измерения пространственных координат цели в многопозиционной системе двухкоординатных РЛС при известных взаимных координатах РЛС, при этом РЛС могут находиться на одной или разных взаимных высотах.
Технический результат предлагаемого технического решения достигается тем, что способ измерения пространственных координат цели заключается в оценивании рассогласований принимаемых плоскостных координат целей от нескольких РЛС, вызванных ненулевой высотой расположения цели.
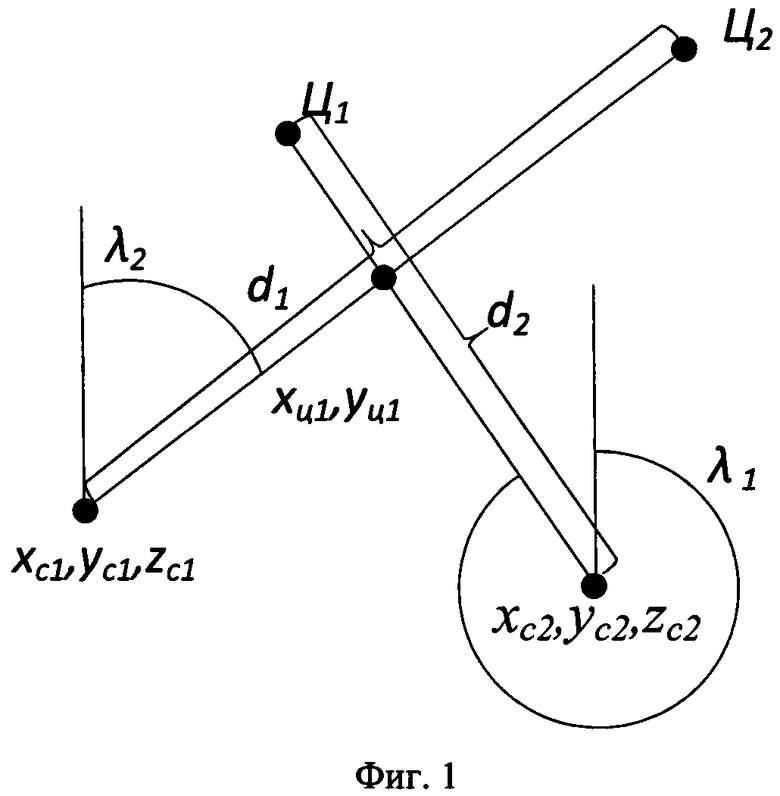
Допустим, известны N станций с координатами (хс1,yс1), (хс2,yс2),…,(xcN,ycN). По обнаруженным целям с известными пеленгами λ1,λ2,…,λN и действительными дальностями от проекции цели до каждой РЛС dg1,dg2,…,dgN определяем координаты точки пересечения линий проекции для каждой пары станций.
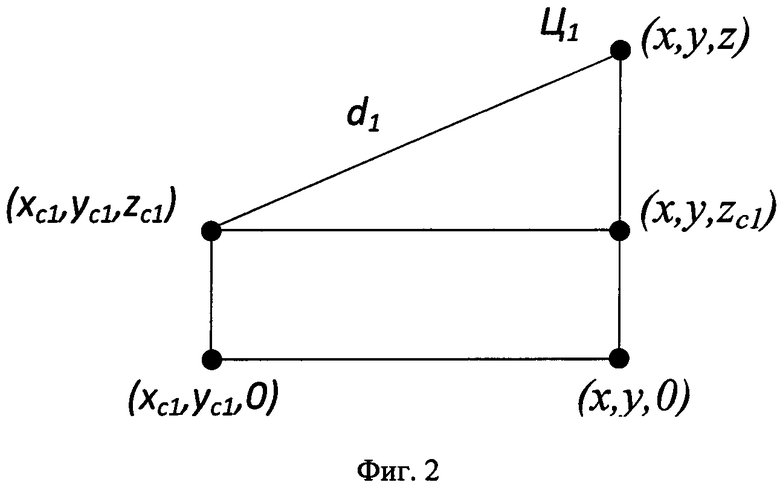
Пусть для двух станций, расположенных на разных высотах (например, над уровнем моря) zc1 и zc2, известны координаты станций (xc1,ycl,zc1), (xc2,yc2,zc2). Пусть цель имеет координаты x, y, z, где z - высота над уровнем моря, которые необходимо определить с помощью измерений дистанций и пеленгов. Тогда для двухкоординатных станций совмещенные на плоскости отметки цели будут иметь вид, показанный на фиг. 1, в виде отметок Ц1 и Ц2 от одной и той же цели на индикаторах кругового обзора двух станций.
Заметим, что отметки от цели Ц1 и Ц2 изображены в плоскостях, расположенных на уровнях zc1 и zс2 соответственно. Рассогласование координат этих отметок объясняется ненулевой высотой z≠0 цели. Действительно,


где d1 и d2 - дистанции от каждой из РЛС до точек с координатами (х, y, zc1) и (х, y, zc2) соответственно. Для пояснения этих формул на фиг. 2 показано сечение пространства вдоль линии визирования первой РЛС и цели.
Связь координат цели с измеряемыми РЛС и пеленгами λ1 и λ2 и дистанциями dg1 и dg2 задается уравнениями:


Вычитая их друг из друга, получаем систему линейных уравнений относительно dg1 и dg2:

Единственное решение существует, если определитель

то есть, если цель находится в общей зоне действия двух РЛС. Тогда
 ,
,
где  ,
,  .
.
После этих вычислений, находим из уравнений (1), (2) два значения высоты цели:


При абсолютно точных измерениях пеленгов и дистанций значения совпадают z1=z2=z. В реальных условиях каждая из РЛС имеет погрешности измерения дальности δd1 δd2 и пеленга δα1 и δα2, которые могут быть пересечены в среднеквадратические погрешности δz1 и δz2 измерения высот z1 и z2 соответственно. Тогда наилучшая оценка высоты с учетом этих погрешностей будет иметь вид:

При этом дисперсия ошибки такого оценивания

Объединяя попарно все данные от нескольких РЛС и усредняя с учетом погрешностей оценивания, получим объединенную оценку трех координат цели по данным любого, большего или равного двум, числа двухкоординатных РЛС.
Источники информации
1. Справочник по радилокации. Под ред. М. Сколника. Нью-Йорк, 1970. Пер. с англ. (в четырех томах) под общей ред. К.Н. Трофимова. Том 4. Радиолокационные станции и системы. Под ред. М.М. Вейсбейна, М., «Сов. радио», 1978, с. 68-87.
2. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для вузов. / Под ред. Г.С. Кондратенкова. - М.: “Радиотехника”, 2005, 368 с.
3. Финкельштейн М.И. Основы радиолокации: Учебник для вузов. - М.: Радио и связь, 1983, 536 с.
4. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М., Радио и связь, 1984, с. 121-124.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, располагаемых на качающемся носителе | 2023 |
|
RU2816259C1 |
| СПОСОБ РАСПОЗНАВАНИЯ УДАЛЕННЫХ ВОЗДУШНЫХ ОБЪЕКТОВ | 2001 |
|
RU2206104C2 |
| Способ многопозиционной радиолокации | 2021 |
|
RU2770827C1 |
| Способ определения высоты цели двухкоординатной РЛС | 2016 |
|
RU2624467C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ ПО КУРСУ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2308093C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| ОДНОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНЫХ КООРДИНАТ, ЭЛЕМЕНТОВ ДВИЖЕНИЯ ЦЕЛИ И КОЭФФИЦИЕНТА КИЛОМЕТРИЧЕСКОГО ЗАТУХАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ЦЕЛИ | 2014 |
|
RU2586078C2 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| Способ определения параметров движения и траекторий воздушных объектов при полуактивной бистатической радиолокации | 2018 |
|
RU2687240C1 |
| Способ построения системы IoT для организации мониторинга и контроля воздушного пространства | 2024 |
|
RU2835361C1 |
Изобретение относится к радиолокации и может быть применено для измерения пространственных координат цели, включая высоту цели, при использовании двухкоординатных радиолокационных станций (РЛС), определяющих пеленг и дистанцию до цели, объединенных в многопозиционную систему РЛС. Достигаемый технический результат - увеличение точности измерения пространственных координат цели при использовании двухкоординатных РЛС, объединенных в систему. Способ заключается в определении рассогласований между координатами цели, спроецированными на плоскость, вызванными ненулевой высотой ее нахождения и вычисленными с помощью каждой из двухкоординатных РЛС, и определении высоты нахождения цели, наилучшим образом соответствующей всем имеющимся рассогласованиям координат на плоскости. 2 ил.
Способ измерения пространственных координат цели в многопозиционной системе двухкоординатных РЛС на основе наблюдений нескольких двухкоординатных РЛС с известными позициями, заключающийся в определении рассогласований между координатами цели, спроецированными на плоскость, вызванными ненулевой высотой ее нахождения и вычисленными с помощью каждой из двухкоординатных РЛС, и определении высоты нахождения цели, наилучшим образом соответствующей всем имеющимся рассогласованиям координат на плоскости.
| ЛЕОНОВ А.И., ФОМИЧЕВ К.И | |||
| Моноимпульсная радиолокация | |||
| Москва | |||
| Радио и связь, 1984, с.121-124 | |||
| Сушильное устройство камерного типа для сушки, например, переплетных крышек | 1959 |
|
SU126474A1 |
| СПОСОБ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2263927C2 |
| Полуавтоматический станок для полирования кромок пера лопатки газовой турбины | 1959 |
|
SU128727A1 |
| US 6950057 B1, 27.09.2005 | |||
| US 5568394 A, 22.10.1996 | |||
| US 7071868 B2, 04.07.2006. | |||

