Изобретение относится к радиолокации, в частности к способам определения параметров положения цели при прямолинейном равномерном движения в окрестности двухкоординатной РЛС, и может быть использовано для получения дополнительных данных по перемещению объектов в пространстве.
Двухкоординатные РЛС при сканировании пространства, согласно своим характеристикам, могут определять дальность до цели и пеленг, без возможности определения высоты.
Для определения высоты широко известны и описаны способы определения высоты цели по угловому положению антенны [1]. Недостатком известных способов является использование специальных трехкоординатных РЛС либо многопозиционной системы двухкоординатных РЛС. При этом наблюдается снижение потенциально достижимой точности определения координат вследствие наложения погрешностей измерения координат либо возникает необходимость большого взаимного удаления позиций для достижения требуемой точности. В работе [2] описан способ амплитудной пеленгации путем анализа огибающей сигнала по максимуму, связанной с применением высоконаправленных антенн, обеспечивающих высокую разрешающую способность по углу и необходимую дальность действия. Анализ огибающей позволяет зафиксировать максимум амплитуды сигнала и определить соответствующее ему направление на цель. Если диаграмма направленности симметрична, цель точечная и сигнал не флуктуирует, то для определения максимума достаточно найти направление середины отметки цели. Недостатком метода является малая инструментальная точность из-за слабого изменения амплитуды сигнала в окрестности максимума.
Наиболее близким является способ определения угломестной координаты низколетящей цели [3], в котором выполняется прием суммарного сигнала, отраженного от цели и подстилающей поверхности, на выходах четырех антенн, формирование дискриминационных характеристик измерителя координат в двух ортогональных плоскостях Sx и Sy и позиционирование максимума главного лепестка суммарной диаграммы направленности антенной системы измерителя координат в направлении точки проекции цели на подстилающую поверхность, при этом центры четырех антенн измерителя координат располагаются попарно симметрично в горизонтальной и вертикальной плоскостях, на одном из выходов измерителя координат формируется дополнительный сигнал. Однако необходимым условием определения угломестной координаты низколетящей цели является наличие четырех антенн.
Техническим результатом предлагаемого изобретения является расширение функциональных возможностей существующих двухкоординатных РЛС.
Технический результат достигается за счет того, что в предлагаемом способе определения высоты цели двухкоординатной РЛС, включающей блоки первичной, вторичной обработки информации и блок индикации информации, с учетом того, что в зоне действия двухкоординатной РЛС низколетящая цель, движущаяся без изменения высоты прямолинейно с равномерной скоростью, и наличия у двухкоординатных РЛС вертикальной диаграммы направленности, отличной от нуля, а координаты замеров положения цели в разные моменты времени, поступающие в блок первичной обработки информации, имеют отклонения, дополнительно в двухкоординатную РЛС между блоком вторичной обработки информации и блоком индикации информации вводят блок постобработки данных траектории цели, состоящий из вычислителя, вычитателя и компаратора, на вход блока постобработки данных траектории цели из блока вторичной обработки информации поступают отфильтрованные координаты замеров цели, из которых отбирают три последовательных замера, обрабатывают их в вычислителе и при решении
(4-L2)H4+(L2⋅(AB3)2-4K+L⋅(AB1)2)H2+(K2-L2⋅(AB1)2(AB3)2)=0,
где Н - высота цели;
АВ1, АВ2, АВ3 - известные наклонные дальности до цели трех последовательных замеров положения цели;
K=-(AB1)2+4⋅(АВ2)2-(АВ3)2;
L=2cosα;
α - разность азимутов для первого и третьего замеров положения цели,
выбирают и сохраняют в вычитателе одно достоверное значение предполагаемой высоты цели при прямолинейной траектории, затем при проведении первой итерации переходят на обработку в вычислителе следующих замеров положения цели, а при проведении второй и последующих итераций в вычитателе определяют отклонение вновь полученной предполагаемой высоты от ранее вычисленной, в компараторе фиксируют отклонение, проводят оценку правильности гипотезы прямолинейности и равномерности, принимают вычисленное значение высоты, которое передают в блок индикации информации и далее переходят на обработку следующих замеров, поступивших в блок постобработки данных траектории цели.
Изобретение поясняется чертежами.
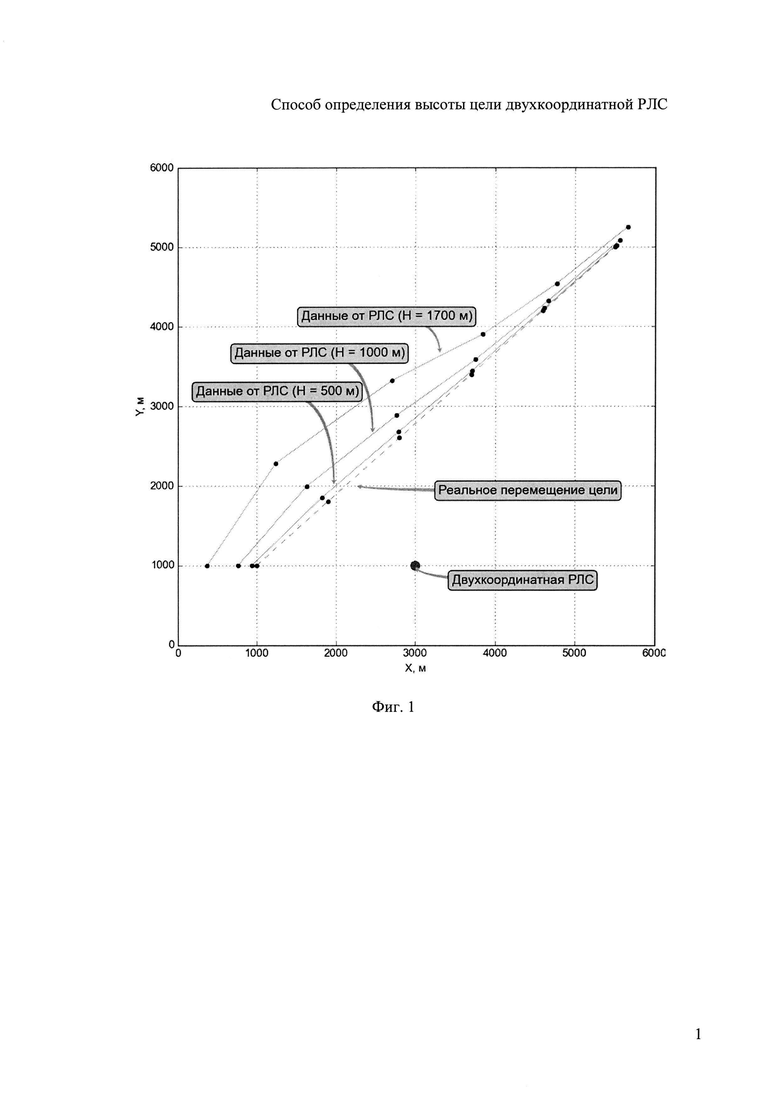
На фиг. 1 представлен пример траекторных отклонений для низколетящей цели для разных высот в зоне видимости двухкоординатной РЛС.
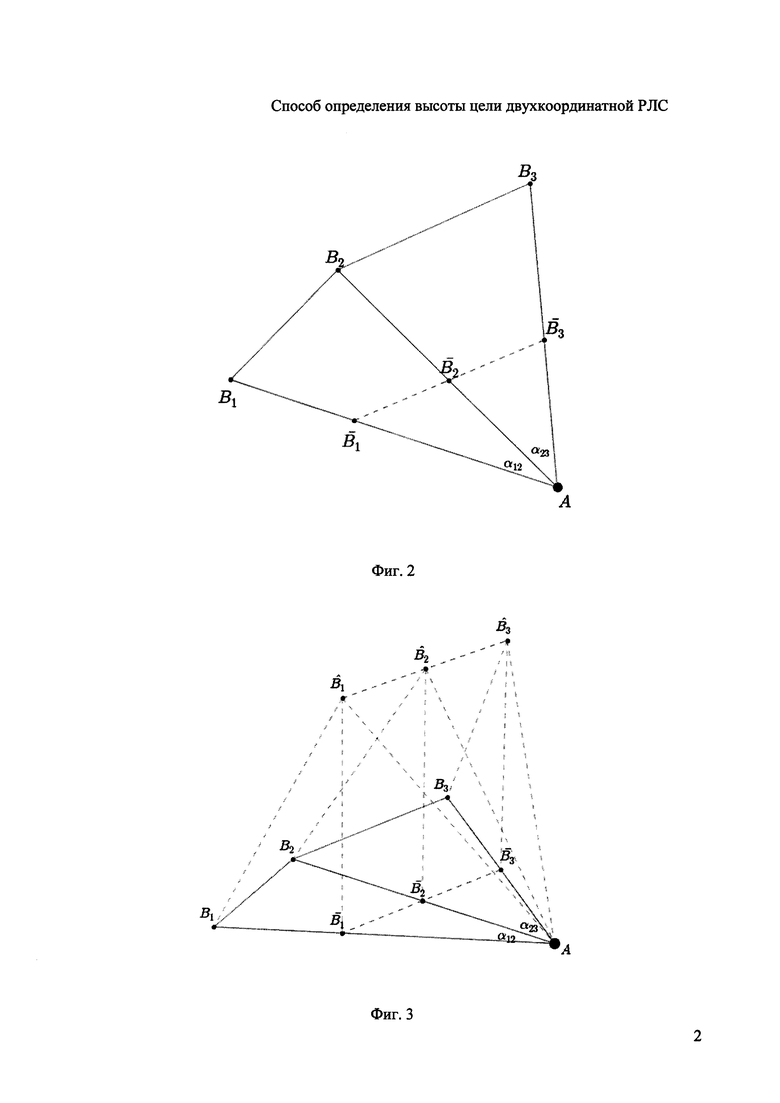
На фиг. 2 представлены позиция двухкоординатной РЛС и проекция на плоскость трех последовательных замеров положений цели.
На фиг. 3 представлены позиция двухкоординатной РЛС и пространственная позиция трех последовательных замеров положений цели.
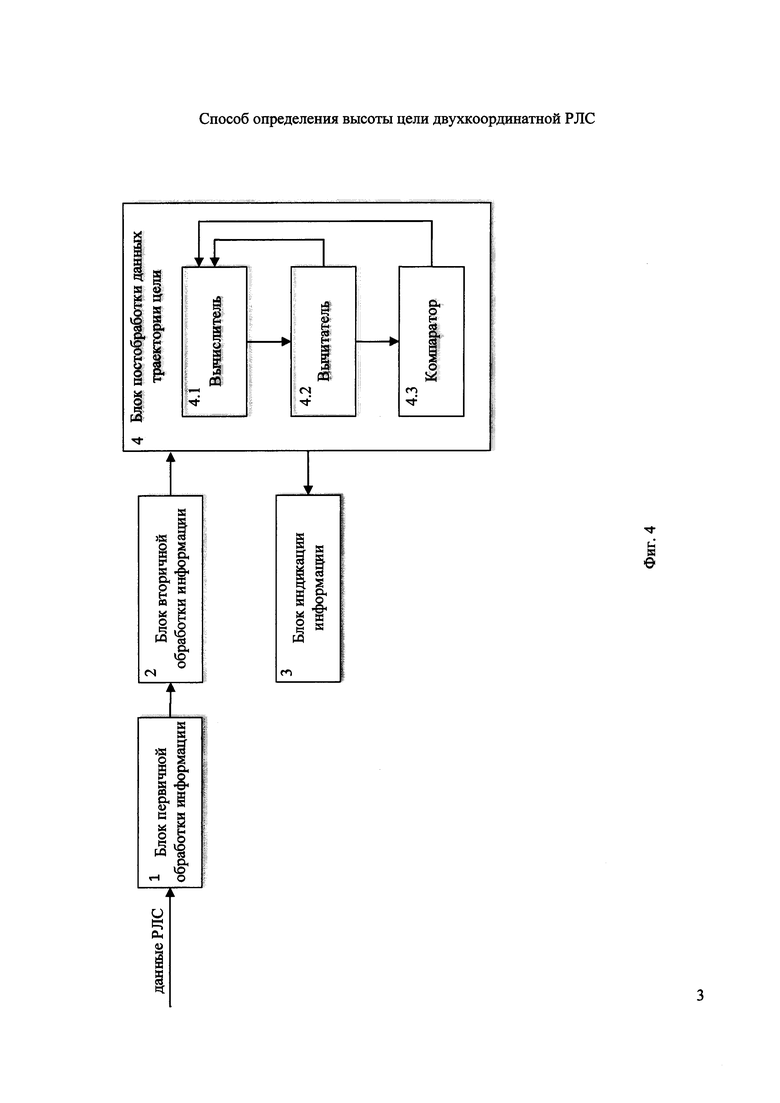
На фиг. 4 представлена схема реализации способа определения высоты цели двухкоординатной РЛС, где 1 - блок первичной обработки информации, 2 - блок вторичной обработки информации, 3 - блок индикации информации, 4 - блок постобработки данных траектории цели, 4.1 - вычислитель, 4.2 - вычитатель, 4.3 - компаратор.
Реализуется способ определения высоты цели двухкоординатной РЛС следующим образом. Эхо-сигналы от приемника РЛС поступают в блок первичной обработки информации 1 на пороговую обработку и выделения целей на фоне шумов, далее замеры положений целей поступают в блок вторичной обработки информации 2 для фильтрации замеров положений цели и определения ее траектории. Между блоком вторичной обработки информации 2 и блоком индикации информации 3 устанавливают блок постобработки данных траектории цели 4. На вход блока постобработки данных траектории цели 4 от блока вторичной обработки информации 2 поступают отфильтрованные замеры положений цели. Блок постобработки данных траектории цели 4 состоит из вычислителя 4.1, вычитателя 4.2 и компаратора 4.3.
Строится предположение, что цель движется без изменения высоты прямолинейно и равномерно, находится в горизонтальной и вертикальной зоне видимости двухкоординатной РЛС. Выдаваемые замеры располагаются в плоскости РЛС в декартовой системе координат (х,у). Также известно, что кривизна поверхности Земли влияет на прямолинейность распространяемой пространственной электромагнитной волны излучаемой РЛС. Так, угол места положения цели с учетом кривизны поверхности Земли находится из выражения:
где Н - высота цели над поверхностью Земли;
hA - высота РЛС над поверхностью Земли;
r - дальность до цели в горизонтальной плоскости нахождения РЛС;
а 3 - эквивалентный радиус Земли с учетом рефракции радиоволн в атмосфере равный 8500 км.
Тем не менее, ввиду малой дальности от цели до РЛС, влиянием эквивалентного радиуса Земли на искомый угол места цели можно пренебречь, так как вычитаемое  стремится к нулю. Исходя из этого, угол места положения цели геометрически зависит только от взаимного расположения цели и РЛС.
стремится к нулю. Исходя из этого, угол места положения цели геометрически зависит только от взаимного расположения цели и РЛС.
В вычислителе 4.1 отбирают три последовательных замера положения цели. Предполагается, что траектория имеет отклонения, которые являются следствием того, что в двухкоординатных РЛС вертикальная диаграмма направленности отлична от нуля и двухкоординатная РЛС выдает наклонную дальность, что поясняется фиг. 1-3.
На фиг. 1 представлены выдаваемые замеры положения цели для низколетящей цели для разных высот в зоне видимости двухкоординатной РЛС с траекторными отклонениями, возникающими при проецировании наклонной дальности на плоскость. Как следует из рисунка, замеры положения прямолинейно движущейся цели, наблюдаемой двухкоординатной РЛС, формируют траекторию с отклонениями относительно реального перемещения цели.
Замеры положения и траекторию цели в окрестности РЛС можно представить в геометрическом виде с учетом того, что дальность до замера положения цели есть ее наклонная дальность.
На фиг. 2 представлены позиция двухкоординатной РЛС и проекция на плоскость трех последовательных замеров положения цели.
На фиг. 3 представлены позиция двухкоординатной РЛС и пространственная позиция трех последовательных замеров положения цели.
Согласно фиг. 2 и 3 взаимное расположение позиции РЛС и трех замеров положения цели представляют треугольники ΔАВ1В2 и ΔАВ2В3 с общей стороной АВ2, где AB1, АВ2 и АВ3 - известные наклонные дальности до цели трех последовательных замеров положения цели. Траектория цели  образует два треугольника
образует два треугольника  и
и  . Эти треугольники имеют одну общую сторону
. Эти треугольники имеют одну общую сторону  и имеют две другие отличные стороны. При этом отрезок есть медиана для треугольника
и имеют две другие отличные стороны. При этом отрезок есть медиана для треугольника  . Для того, чтобы найти углы α12 и α23, образуемые этой медианой, необходимо найти расстояние между замерами положения цели В1В2 и В2В3. Это можно выполнить с помощью нахождения разности составляющих координат (х,у) замеров положения цели и последующего применения теоремы Пифагора.
. Для того, чтобы найти углы α12 и α23, образуемые этой медианой, необходимо найти расстояние между замерами положения цели В1В2 и В2В3. Это можно выполнить с помощью нахождения разности составляющих координат (х,у) замеров положения цели и последующего применения теоремы Пифагора.
Далее, воспользовавшись теоремой косинусов, находят углы α12 и α23:
После этого находят длину медианы  через две стороны
через две стороны  и
и  и известный азимут между первым и третьим замерами положения цели α, вычисляемый как:
и известный азимут между первым и третьим замерами положения цели α, вычисляемый как:
α=α12+α23.
Отсюда квадрат медианы равен:
 .
.
Исходя из предположения, что цель движется прямолинейно и равномерно на одной высоте (фиг. 3)  на всех трех замерах, составляют следующую систему из четырех уравнений:
на всех трех замерах, составляют следующую систему из четырех уравнений:
 .
.
Выражают первое уравнение системы через три других:

Дальнейшее упрощение дает выражение:

Для упрощения выражения выделяют известные переменные через коэффициенты K и L:
K=-(AB1)2+4⋅(АВ2)2-(АВ3)2,
L=2cosα.
Дальнейшее последовательное упрощение уравнений дает:
 ,
,
(K-2⋅H2)2=L2⋅((AB1)2-Н2)⋅((АВ3)2-H2),
K2-4KН2+4H4=L2⋅((АВ1)2(AB3)2-(АВ3)2Н2-(AB1)2H2+H4),
K2-4KН2+4H4=L2⋅(AВ1)2(AВ3)2-L2⋅(АВ3)2Н2-L2⋅(АВ1)2Н2+L2⋅H4,
K2-4KH2+4H4-L2⋅H4-L2⋅(AB1)2(AB3)2+L2⋅(AB3)2H2+L2⋅(АВ1)2H2=0.
Для определения искомой высоты нахождения прямолинейно перемещающейся с равномерной скоростью цели в зоне видимости РЛС получают биквадратное уравнение четвертой степени вида:
(4-L2)H4+(L2⋅(AB3)2-4K+L2⋅(AB1)2)H2+(K2-L2⋅(AB1)2(AB3)2)=0.
Биквадратное уравнение четвертой степени имеет два решения, одно из которых является достоверным. Выбирают и сохраняют в вычитателе одно достоверное значение предполагаемой высоты цели при прямолинейной траектории.
При этом ввиду флуктуации передаваемых замеров положения цели в блок постобработки данных траектории цели, найденные значения высоты цели также могут флуктуировать около определенной величины. Для сглаживания флуктуаций высоты используют, например, известный фильтр Калмана.
Затем, в случае проведения первой итерации переходят на обработку в вычислителе следующих замеров положения цели, а при проведении второй и последующих итераций в вычитателе определяют отклонение вновь полученной предполагаемой высоты от ранее вычисленной. Далее, в компараторе фиксируют отклонение, проводят оценку правильности гипотезы прямолинейности и равномерности, принимают вычисленное значение высоты, которое передают в блок индикации информации и далее переходят на обработку следующих замеров, поступивших в блок постобработки данных траектории цели.
По известной высоте цели и наклонной дальности от РЛС до цели находят координаты проекции цели на горизонтальную плоскость нахождения РЛС.
Данный способ применим также для цели, находящейся в плоскости нахождения РЛС либо ниже ее уровня. Кроме того, косвенно данный способ также дает возможность судить об отсутствии или наличии маневра для наземных и надводных целей с достаточно высокой точностью.
Предлагаемый способ расширяет функциональные возможности существующих двухкоординатных РЛС и может быть осуществлен при добавлении в схему РЛС блока постобработки данных траектории цели, состоящего из вычислителя, вычитателя и компаратора.
Литература
1. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М., Сов. Радио, 1974. 432 с.
2. Финкельштейн М.И. Основы радиолокации: Учебник для вузов. - М.: Радио и связь, 1983. 536 с.
3. Пат. 2444750 С2 Российская Федерация, МПК G01S 5/08. Способ определения угломестной координаты низколетящей цели / Балагуровский В.А., Кондратьев А.С., Полищук Н.П.; заявитель и патентообладатель Открытое акционерное общество «Головное системное конструкторское бюро Концерна ПВО «Алмаз-Антей» им. академика А.А. Расплетина» (ОАО «ГСКБ «Алмаз-Антей») (RU) - №2010123966/07; заявл. 11.06.2010; опубл. 10.03.2012.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения траектории маневрирующего воздушно-космического объекта | 2022 |
|
RU2818964C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307375C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И МОНОИМПУЛЬСНАЯ РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2802886C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ, КУРСА И СКОРОСТИ ВОЗДУШНОГО СУДНА | 2012 |
|
RU2506541C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА С ПРОГНОЗОМ ПРОПАДАНИЯ ЦЕЛЕЙ В ЗОНАХ ДОПЛЕРОВСКОЙ РЕЗЕКЦИИ | 2009 |
|
RU2408030C2 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 1993 |
|
RU2048684C1 |
| СИСТЕМА КОНТРОЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2092887C1 |
Изобретение относится к радиолокации, в частности к способам определения параметров положения цели при прямолинейном равномерном движения в окрестности радиолокационной станции (РЛС), и может быть использовано для получения дополнительных данных по перемещению объектов в пространстве, в том числе высоты, при использовании двухкоординатных РЛС, осуществляющих круговой или секторный обзор пространства. Технический результат - расширение функциональных возможностей существующих двухкоординатных РЛС. Указанный результат достигается за счет того, что в двухкоординатную РЛС между блоком вторичной обработки информации и блоком индикации информации вводят блок постобработки данных траектории цели, состоящий из вычислителя, вычитателя и компаратора, на вход блока постобработки данных траектории цели из блока вторичной обработки информации поступают отфильтрованные замеры положения цели, из которых отбирают три последовательных замера, обрабатывают их в вычислителе, выбирают и сохраняют в вычитателе одно достоверное значение предполагаемой высоты цели при прямолинейной траектории, затем в случае проведения первой итерации переходят на обработку в вычислителе следующих замеров положения цели, а при проведении второй и последующих итераций в вычитателе определяют отклонение вновь полученной предполагаемой высоты от ранее вычисленной, в компараторе фиксируют отклонение, проводят оценку правильности гипотезы прямолинейности и равномерности, принимают вычисленное значение высоты, которое передают в блок индикации информации и далее переходят на обработку следующих замеров, поступивших в блок постобработки данных траектории цели. 4 ил.
Способ определения высоты цели двухкоординатной РЛС, включающей блоки первичной, вторичной обработки и блок индикации информации, с учетом того, что в зоне действия двухкоординатной РЛС низколетящая цель, движущаяся без изменения высоты прямолинейно с равномерной скоростью, и наличия у двухкоординатных РЛС вертикальной диаграммы направленности, отличной от нуля, а координаты замеров положения цели в разные моменты времени, поступающие в блок первичной обработки двухкоординатной РЛС, имеют отклонения, отличающийся тем, что в двухкоординатную РЛС между блоком вторичной обработки информации и блоком индикации информации вводят блок постобработки данных траектории цели, состоящий из вычислителя, вычитателя и компаратора, на вход блока постобработки данных траектории цели из блока вторичной обработки информации поступают отфильтрованные замеры положения цели и ее траектория, из которых отбирают три последовательных замера, обрабатывают их в вычислителе и при решении
(4-L2)H4+(L2⋅(AB3)2-4K+L2⋅(AB1)2)H2+(K2-L2⋅(АВ1)2(АВ3)2)=0,
где Н - высота цели;
АВ1, АВ2, АВ3 - известные наклонные дальности до цели трех последовательных замеров положения цели;
K=-(AB1)2+4⋅(АВ2)2-(AB3)2;
L=2cosα;
α - разность азимутов для первого и третьего замеров положения цели,
выбирают и сохраняют в вычитателе одно достоверное значение предполагаемой высоты цели при прямолинейной траектории, затем в случае проведения первой итерации переходят на обработку в вычислителе следующих замеров положения цели, а при проведении второй и последующих итераций в вычитателе определяют отклонение вновь полученной предполагаемой высоты от ранее вычисленной, в компараторе фиксируют отклонение, проводят оценку правильности гипотезы прямолинейности и равномерности, принимают вычисленное значение высоты, которое передают в блок индикации информации и далее переходят на обработку следующих замеров, поступивших в блок постобработки данных траектории цели.
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОМЕСТНОЙ КООРДИНАТЫ НИЗКОЛЕТЯЩЕЙ ЦЕЛИ | 2010 |
|
RU2444750C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ В МНОГОПОЗИЦИОННОЙ СИСТЕМЕ ДВУХКООРДИНАТНЫХ РЛС | 2014 |
|
RU2581706C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2588105C2 |
| JP 2009014655 A, 22.01.2009 | |||
| WO 2012085868 A1, 28.06.2012 | |||
| US 8044842 B2, 25.10.2011 | |||
| US 8698669 B1, 15.04.2014. | |||

