2.Рулевое управление по п. 1, отличающееся тем, что механизм дистанционного управления представляет собой электродвигатель, соединенный через орган управления с источником энергии и кинематически связанный с управляемыми колесами заднего звена.,
3.Рулевое управление по п. 1, отличающееся тем, что горизонтальный шарнир расположен в месте соединения сцепных элементов соседних звеньев транспортного средства.
4.Рулевое управление по п. 1, отличающееся тем, что дифференциальный механизм выполнен планетарным.
5.Рулевое управление по п. 1, отличающееся тем, что дифференциальный механизм выполнен рычажным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| Пропашной самоходный агрегат | 1979 |
|
SU858598A1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1989 |
|
SU1740229A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2608786C2 |
| Стабилизирующее буксирное устройство одноосного прицепа с регулируемым наклоном шкворня | 2021 |
|
RU2771088C1 |
| Привод ведущего моста прицепа | 1986 |
|
SU1369977A1 |
| Рулевое управление прицепного звена транспортного средства | 1987 |
|
SU1425124A1 |
1. РУЛЕВОЕ УПРАВЛЕНИЕ МНОГОЗВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА, содержащее рулевой механизм-, соединенный с органом управления и управляемыми колесами первого звена и через механизм изменения передаточного отношрния с управляемыми колесами последующих звеньев, механически связанных друг с другом посредством сцепных устройств. отличающееся тем, что, с целью обеспечения возможности движения многозвенного транспортного средства как передним. fo так и задним ходом и повышения курсовой устойчивости движения последующих звеньев, оно снабжено механизмом дистанционного управления колесами заднего звена, установленным на заднем звене и связанным с органом управления и кинематически -гс управляемыми колесами предыдущих звеньев, каждое из сцепных устройств выполнено в виде жесткого элемента с горизонтальным шарниром, а каждый механизм изменения передаточного отношения выполнен в виде дифференциального механизма, один из двух входов которого кинематически связан с рулевым механизмом, а дру-. гой - с механизмом дистанционного управления колесами заднего звена, а выход дифференциального механизма кинематически связан с управляемыми колесами звена, на котором расположен дифферен(Л циальный механизм. ел со 4
Изобретение относится к автомобилестроению и может быть использовано при создании управления многозвенными транспортными средствами, в том числе автопоездами с большим количеством звеньев.
Известно рулевое управление многозвенного транспортного средства, содержащее рулевой механизм, соединенный с органом управления и управляемыми колесами первого звена и через механизм изменения передаточного отношения с управляемыми колесами последующих звеньев, механически связанных друг с другом посредством сцепных устройств .
Недостатком рулевого управления является то, что оно не обеспечивает возможности многозвенному транспортному средству управляемо двигается задним ходом. Это происходит потому, что известная схема рулевого управления предусматривает использование рулевого управления первого звена для обеспечения управляемого движения при заднем ходе многозвенного транспортного средства.
Другим недостатком устройства является то, что рулевое управление последующих звеньев кинематически связано лишь с рулевым .механизмом, расположенным на первом звене, поэтому при движении задним ходом рулевой привод последующих звеньев оказывается расположенным позади управляемых колес. Поэтому невозможно отслеживать угол складывания соседнего, впереди движущегося звена и обеспечивать следование управляемых колес последующих звеньев по колее впереди движущегося звена.
Недостатком.известного рулевого управления является также то, что рулевое управление прицепных звеньев - как прицепов, так и полуприцепов, состоящее из тяг, или тросов, или цепей, имеет большую длину общей кинематической цепи, большое количество элементов ее образующих и большое количество шарниров. Шарниры
склонны к оброванию люфтов в процессе эксплуатации. Это является причиной плохой курсовой устойчивости прицепных звеньев, которая тем хуже, чем больше шарниров и чем выше скорость движения. При этом тяги, рычаги, троса и цепи при паразитных нагрузках, порождаемых неровностями дороги, подвержены возможным деформациям.
Цель изобретения - обеспечение возможности движения многозвенного транспортного средства как передним, так и задним ходом и повышение курсовой устойчивости движения прицепных звеньев.
Указанная цель достигается тем, что рулевое управление многозвенного транспортного средства, содержащее рулевой механизм, соединенный с органом управления и управляемыми колесами первого звена и через механизм изменения передаточного отношения с управляемыми колесами последующих звеньев, механически связанных друг с другом посредством сцепных устройств, снабжено механизмом дистанционного управления колесами заднего звена, установленным на заднем звене и связанным с органом управления и кинематически - с управляемыми колесами предыдущих звеньев, каждое из сцепных устройств выполнено в виде жесткого элемента с горизонтальным шарниром; а каждый механизм изменения передаточного отношения выполнен в.виде дифференциального механизма, один из двух - входов которого кинематически связан с рулевым механизмом, а другой - с механизмом дистанционного управления колесами заднего звена, а выход дифференциального механизма кинематически связан с управляемыми олесами звена, на котором расположен дифференциальный механизм.
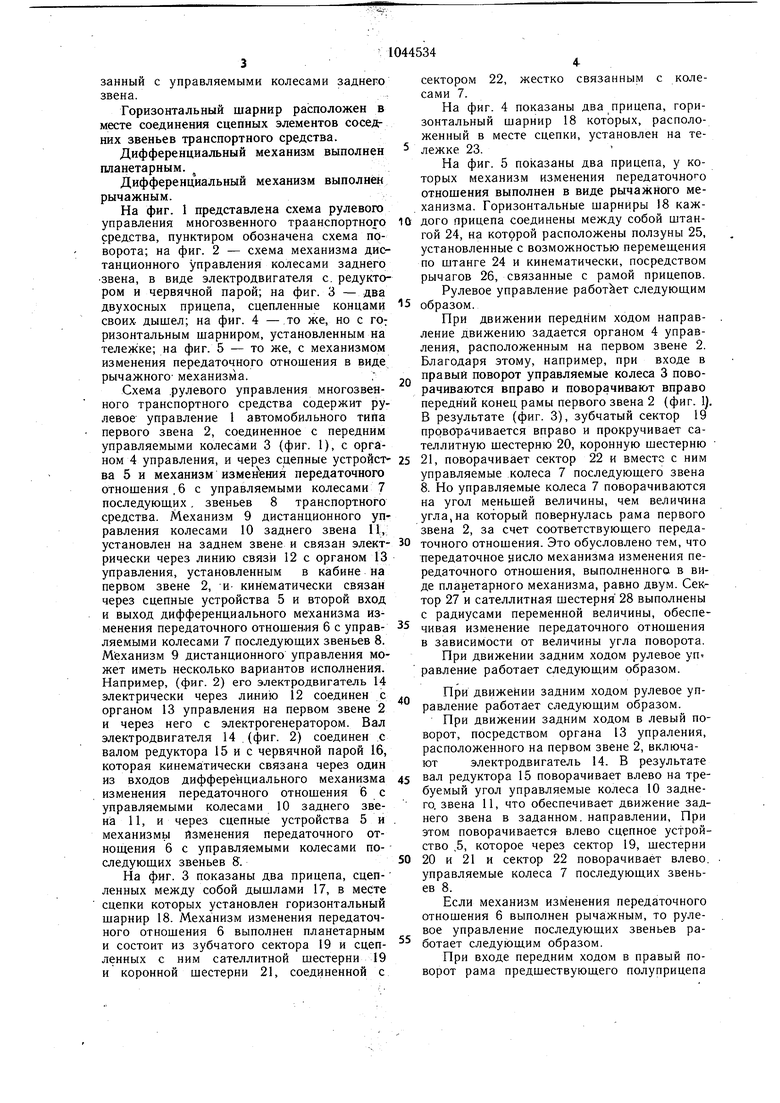
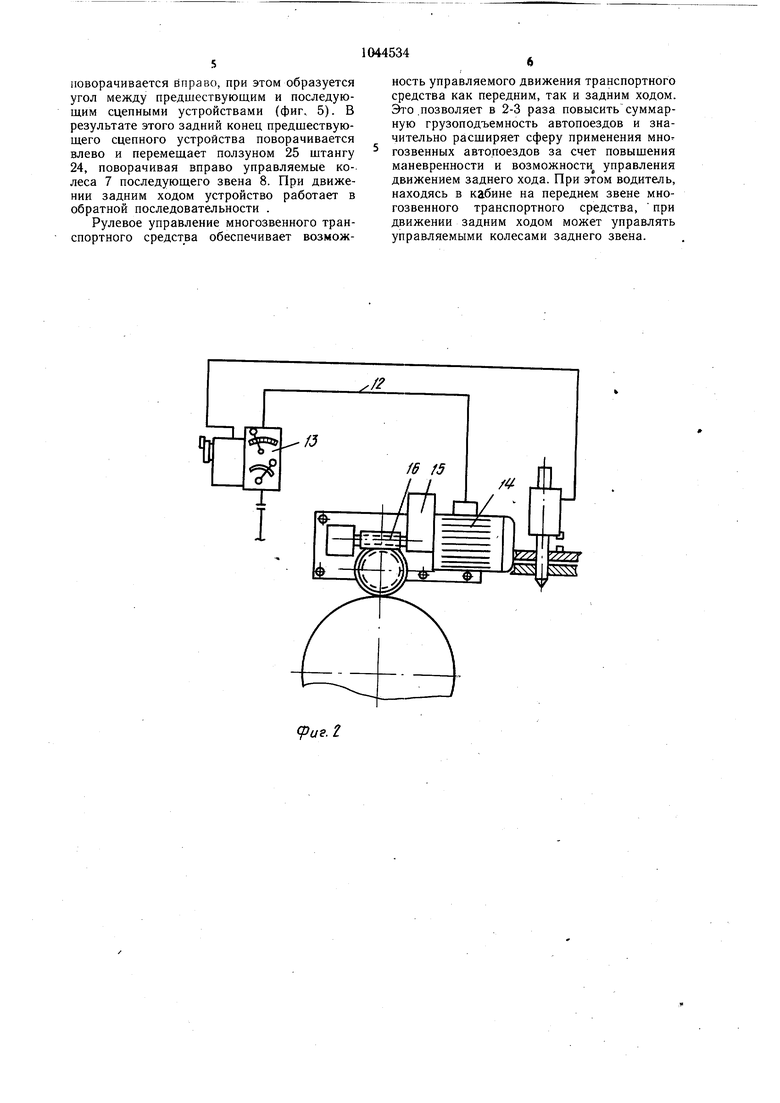
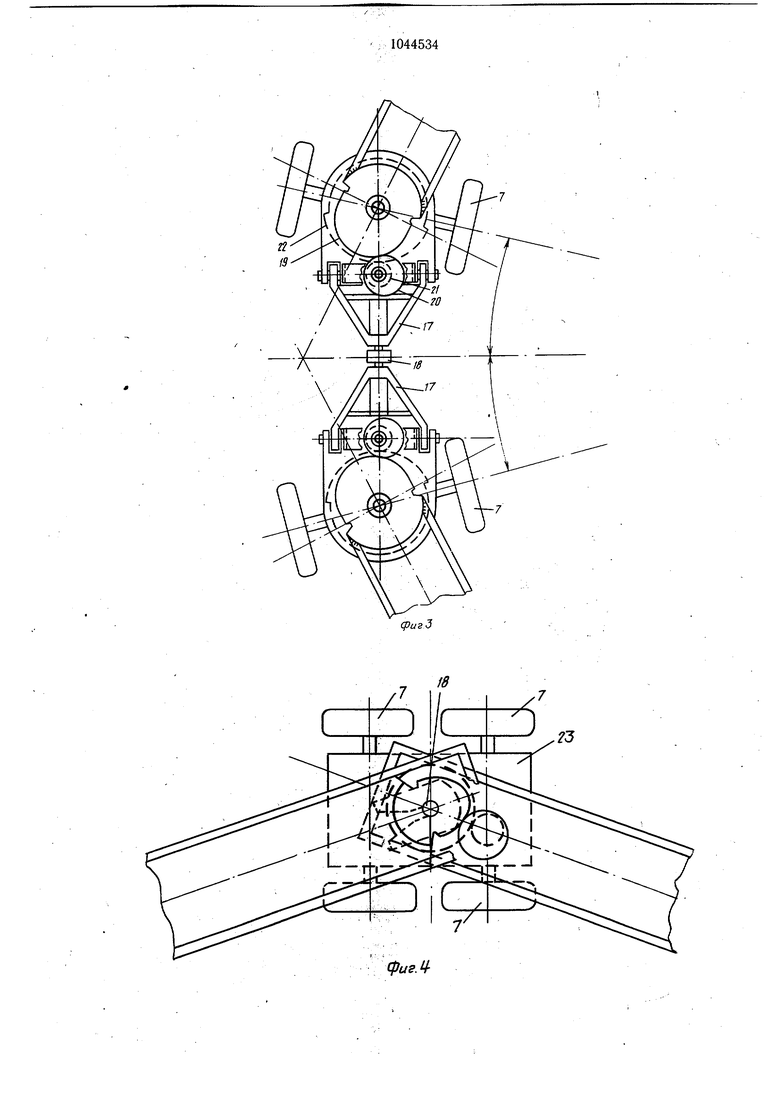
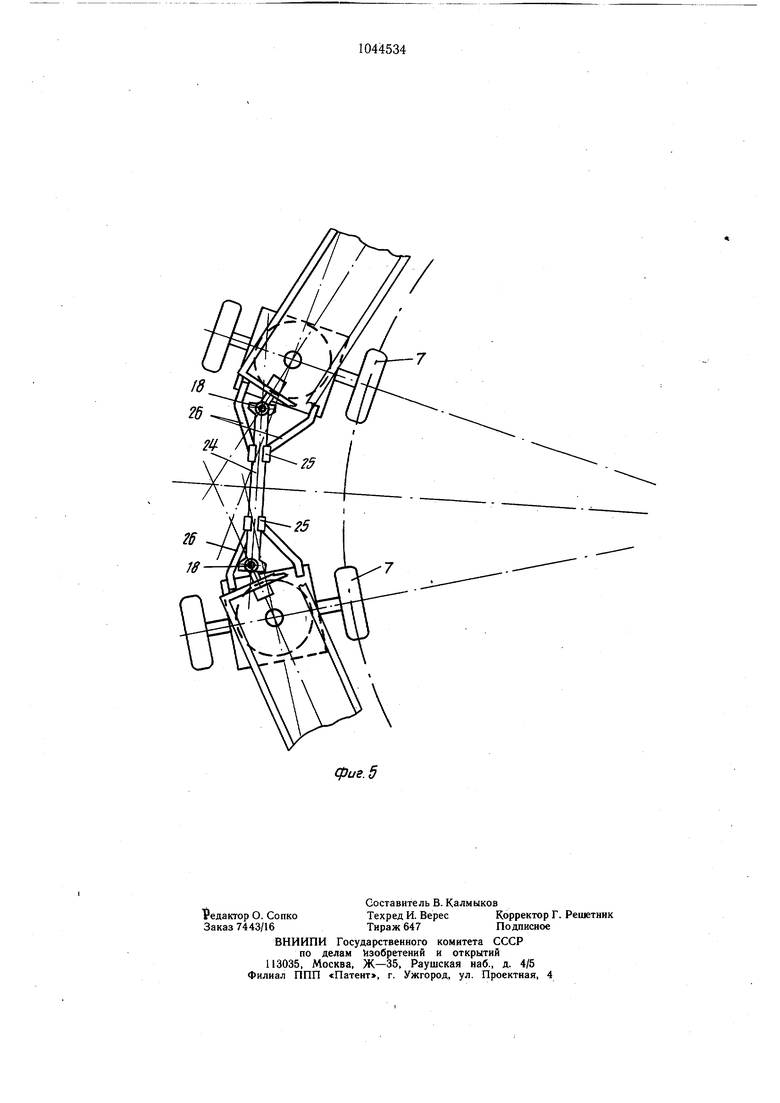
Кроме того, механизм дистанционного управления представляет собой электродвигатель, соединенный через орган управления с источником энергии и кинематически связанный с управляемыми колесами заднепо звена. Горизонтальный шарнир расположен в месте соединения сцепных элементов соседних звеньев транспортного средства. Дифференциальный механизм выполнен планетарным. Дифференциальный механизм выполнен рычажным. На фиг. 1 представлена схема рулевого управления многозвенного траанспортного средства, пунктиром обозначена схема прворота; на фиг. 2 - схема механизма днетанционного управления колесами заднего звена, в виде электродвигателя с. редуктором и червячной парой; на фиг. 3 - два двухосных прицепа, сцепленные концами своих дышел; на фиг. 4 - то же, но с го: ризонтальным шарниром, установленным на тележке; на фиг. 5 - то же, с механизмом изменения передаточного отношения в виде рычажного механизма. Схема .рулевого управления многозвенного транспортного средства содержит рулевое управление 1 автомобильного типа первого звена 2, соединенное с передним управляемыми колесами 3 (фиг. 1), с органом 4 управления, и через сцепные устройства 5 и механизм изменения передаточного отношения,6 с управляемыми колесами 7 последующих, звеньев 8 транспортного средства. Механизм 9 дистанционного управления колесами 10 заднего звена 11, установлен на заднем звене и связан электрически через линию связи 12 с органом 13 управления, установленным в кабине на первом звене 2, -и- кинематически связан через сцепные устройства 5 и второй вход и выход дифференциального механизма изменения передаточного отношен.ия 6 с управляемыми колесами 7 последующих звеньев 8. Механизм 9 дистанционного управления может иметь несколько вариантов исполнения. Например, (фиг. 2) его электродвигатель 14 электрически через линию 12 соединен с органом 13 управления на первом звене 2 и через него с электрогенератором. Вал электродвигателя 14 .(фиг. 2) соединен с валом редуктора 15 и с червячной парой 16, которая кинематически связана через один из входов дифференциального механизма изменения передаточного отношения 6 с управляемыми колесами 10 заднего звени 11, и через сцепные устройства 5 и механизмь изменения передаточного отнощения 6 с управляемыми колесами последующих звеньев 8. На фиг. 3 показаны два прицепа, сцепленных между собой дышлами 17, в месте сцепки которых установлен горизонтальный шарнир 18. Механизм изменения передаточного отношения 6 выполнен планетарным и состоит из зубчатого сектора 19 и сцепленных с ним сателлитной шестерни 19 и коронной шестерни 21, соединенной с сектором 22, жестко связанным с колесами 7. На фиг. 4 показаны два прицепа, горизонтальный шарнир 18 которых, расположенный в месте сцепки, установлен на тележке 23. На фиг. 5 показаны два прицепа, у которых механизм изменения передаточного отношения выполнен в виде рычажного механизма. Горизонтальные шарниры 18 каждого прицепа соединены между собой штангой 24, на которой расположены ползуны 25, установленные с возможностью перемеш,ения по штанге 24 и кинематически, посредством рычагов 26, связанные с рамой прицепов, Рулевое управление работает следующим образом. При движении передним ходом направление движению задается органом 4 управления, расположенным на первом звене 2. Благодаря этому, например, при входе в правый поворот управляемые колеса 3 поворачиваются вправо и поворачивают вправо передний конец рамы первого звена 2 (фиг. 1). В результате (фиг. 3), зубчатый сектор 19 проворачивается вправо и прокручивает сателлитную шестерню 20, коронную шестерню 21, поворачивает сектор 22 и вместе с ним управляемые колеса 7 последующего звена 8. Но управляемые колеса 7 поворачиваются на угол меньшей величины, чем веЛичина угла,на который повернулась рама первого звена 2, за счет соответствующего передаточного отношения. Это обусловлено тем, что передаточное нисло механизма изменения передаточного отношения, выполненного в виде планетарного механизма, равно двум. Сектор 27 и сателлитная шестерня28 выполнены с радиусами переменной величины, обеспечцвая изменение передаточного отношения в зависимости от величины угла поворота. При движении задним ходом рулевое уп равление работает следующим образом. При движении задним ходом рулевое управление работает следующим образом. При движении задним ходом в левый поворот, посредством органа 13 упраления, расположенного на первом звене 2, включают электродвигатель 14. В результате редуктора 15 поворачивает влево на требуемый угол управляемые колеса 10 заднего, звена 11, что обеспечивает движение заднего звена в заданном, направлении. При этом поворачивается влево сцепное устройство ,5, которое через сектор 19, шестерни 20 и 21 и сектор 22 поворачивает влево. управляемые колеса 7 последуюших звеньев 8. Если механизм изменения передаточного отношения 6 выполнен рычажным, то рулевое управление последующих звеньев работает следующим образом. При входе передним ходом в правый поворот рама предшествующего полуприцепа
поворачивается йправо, при этом образуется угол между предшествующим и последующим сцепными устройствами (фиг. Ь). ь результате этого задний конец предшествующего сцепного устройства поворачивается влево и перемещает ползуном 25 штангу 24 поворачивая вправо управляемые колеса 7 последующего звена 8. При движении задним ходом устройство работает в обратной последовательности .
Рулевое управление многозвенного транспортного средства обеспечивает возможность управляемого движения транспортного средства как передним, так и задним ходом. Э1-0 позволяет в 2-3 раза повысить суммарную грузоподъемность автопоездов и значительно расширяет сферу применения мно. гозвенных автопоездов за счет повышения маневренности и возможности управления движением заднего хода. При этом водитель, находясь в кабине на переднем звене многозвенного транспортного средства, при движении задним ходом может управлять управляемыми колесами заднего звена.
(рае. 2
Cffue.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Закин Я | |||
| X | |||
| Конструкция и расчет автомобильных поездов | |||
| Л., «Машиностроение | |||
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |
