Изобретение относится к области числового программного управления и может быть использовано в системах управления координатными перемещения - ми исполнительных органов станков со следящими приводами, у которых управляющим сигналом является рассогла - сование между задающим сигналом с интерполятора и сигналом датчика положения.
Цель изобретения - повышение быстродействия, точности и надежности устройства за счет обеспечения возможности определения момента действительной остановки исполнительного органа после отработки кадра программы.
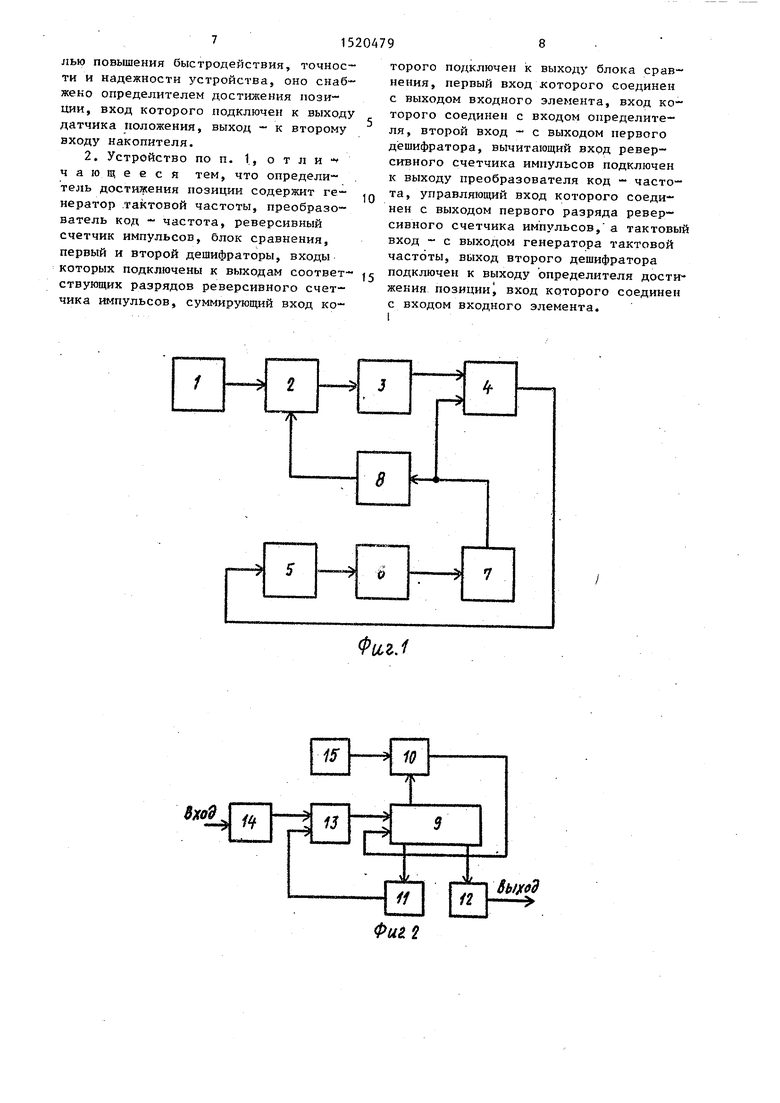
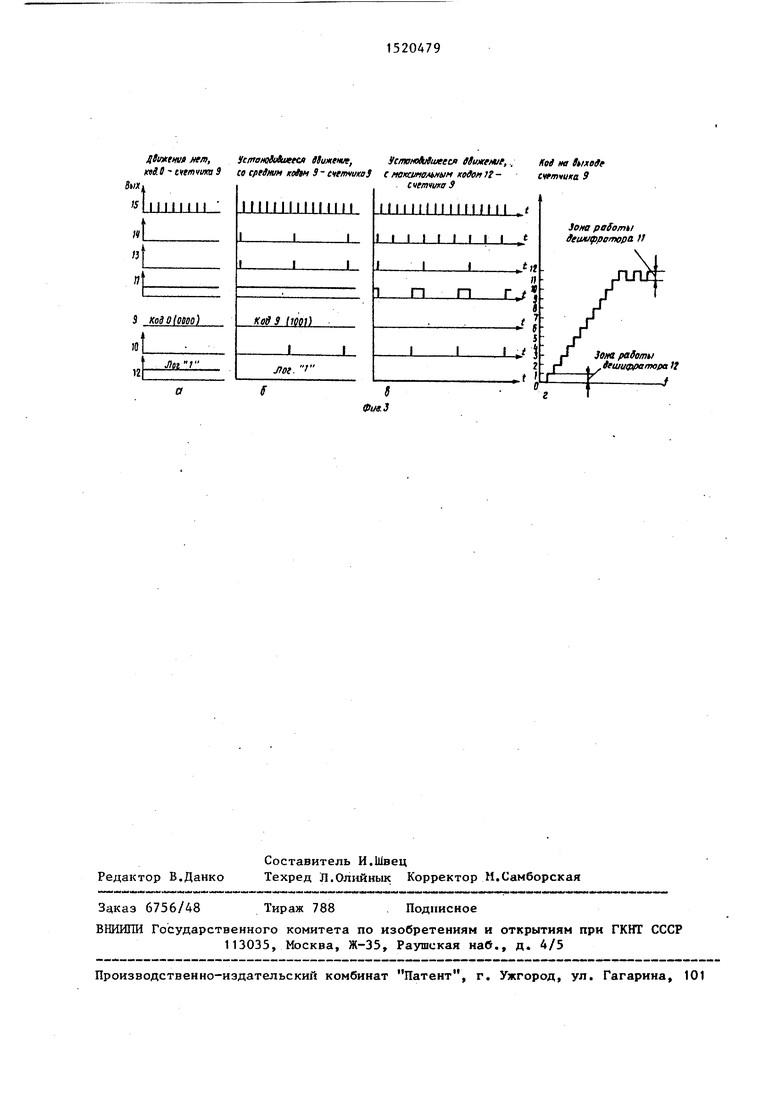
На фиг. 1 изображена структурная схема устройства для программного уп- равления объектом; на фиг. 2 - структурная схема определителя достижения позиции; на фиг. 3 - диаграммы, поясняющие работу устройства.
Устройство содержит фотосчитываю- щий блок 1, накопитель 2 информации, интерполятор 3, счетчик 4 рассогласования, усилитель 5, исполнительный орган 6, датчик 7 положения, определитель 8 достижения позиции.
Определитель достижения позиции содержит реверсивный счетчик 9, преобразователь 10 код - частота, первый дешифратор 11, второй дешифратор 12,
блок 13 сравнения, входной элемент 14 генератор 15 тактовой частоты.
Принцип работы онределителя достижения позиции заключается в отработке отрицательной обратной связи, приходя щей на второй вход реверсивного счетчика 9 частоты, которая приходит от датчика 7 положения через входной элемент 14 и элемент 13 сравнения на первый вход реверсивного счетчика 9 и в кодовом виде подается с выхода реверсивного счетчика 9 на вход преобразователя 10 код - частота.
В системах ЧПУ ввод информации из накопителя в счетчик отработки интерполятора осуществляется но команде Ко- нец отработки кадра (КОК), которая формируется по нулевому состоянию счетчика отработки. При этом ко- манда КОК вырабатывается счетчиком отработки раньше отработки кад ра исполнительным органом, что приводит к контурной ошибке на детали.
Для исключения подобных ошибок необходимо вводить дополнительные кадры с задержкой времени. Данное решение позволяет определять действительный конец отработки кадра исполнительным органом по команде КОК, которая в данном случае формируется при возникновении сигнала Позиция достигнута, что дает возможность производить работу без использования кадров задержки времени и поэтом существенно увеличить производительность.
Определитель достижения позиции работает следующим образом.
В исходном состоянии информация, поступившая с накопителя 2 в интерполятор 3 (не использованные выходы условно не показаны), отработана следящим приводом (счетчиком 4 рассогласования, усилителем 3, исполнительным органом 6, датчиком 7 положения на выходе) счетчика 4 рассогла- сования сигнал равен нулю и перемещение исполнительного органа 6 и датчика 7 положения отсутствует. При этом на выходе датчика 7 положения импульсы отсутствуют, на первом выходе реверсивного счетчика 9 импульсов код равен нулю, следовательно и на выходе и на преобразователе 10 код - частота импульсы (частота) отсутствзмот, а на выходе дешифратора 11 - сигнал разрешения на прохождение частоты датчика 7 положения через первый вход блока 13 сравнения, на выходе
определителя 8 достижения позиции (на выходе дешифратора 12)- сигнал разрешения на введение следующего кадра из накопителя 2 информации в интерполятор 3.
При отработке нового кадра, поступившего из накопителя 2 информации в интерполятор 3, на его выходе по- явится команда в виде частоты унитарного кода fy, , поступающая на первы11
вход счетчика 4 рассогласования. На выходе счетчика 4 рассогласования появится сигнал, который, усиливаясь в усилителе 5, приводит в движение исполнительный орган 6, а следовательно, датчик 7 положения. На выходе появятся импульсы (частота fAaT(), которые
подаются на второй вход счетчика 4 рассогласования, являясь отрицательной обратной связью по положению, а также через входной (согласующий) элемент 14 и первый вход блока 13 подаются на первый вход реверсивного счетчика 9 импульсов. При этом на первом выходе реверсивного счетчика 9 импульсов появится код К1. Этот код приведет к появлению на выходе преобразователя 10 код - частота частоты, которая приходит на второй вычитающий вход реверсивного счетчика 9 импуль- сов. Сигнал запрета появится на выхо-. де дешифратора 12 на прохождение информации с накопителя 2 информации в интерполятор 3, причем код К1 на выходе преобразователя 10 будет соответствовать частоте на преобразователе 10, которая равна Еддт,
При задании интерполятором 3 частоты унитарного кода fu,j7fu, на выходе
счетчика 4 рассогласования увеличивается сигнал, и исполнительный орган 6, а следовательно, и датчик 7 положения, увеличивают скорость. На выходе датчика 7 увеличивается частота f , что
приводит к увеличению сигнала отрицательной обратной связи, приходящей на
второй вход счетчика 4 рассогласования, а также к появлению кода на выходе реверсивного счетчика 9 импульсов. Это в свою очередь вызовет увеличение частоты на выходе преобразователя 10, которая приходит на второй вычитающий вход реверсивного счетчика 9 импульсов, таким образом, что эта частота будет равна fдате
51520А79
Так, во всех установившихся режимах
Для исключения переполнения реверсивного счетчика импульсов 9 при .коде Кп на больших скоростях следящего привода при частоте датчика 7 положения, равной дятп на выходе дешифратора 11 формируется сиграл запрета, что приводит к закрытию блока 13 сравнения и исчезновению импульсов jQ на первом входе реверсивного счетЧи- ка 9 импульсов. При этом первый же импульс частоты, приходящий на второй, вычитающий вход реверсивного счетчика 9 импз льсов, .изменит код 15 на выходе с К на Кп-4 . На выходе
дешифратора 11 появится сигнал разрешения. Блок 13 откроется, разрешая проходить частоте с датчика 7 положения на первый вход реверсивного 20 счетчика 9 импульсов. Если частота датчика 7 положения равна предьщущей или выше, то на выходе реверсивного счетчика 9 импульсов появится код К и процесс повторится. 25
При торможении исполнительного привода, равном Dp, граничную частоту органа 6 количество импульсов с датчи- на выходе преобразователя 10 код - ка 7 положения считывается отрица- частота (при коде на выходе ре- тельной обратной связью и при нулевом версивного счетчика 9 импульсов)выби- о состоянии реверсивного счетчика 9,
с постоянной скоростью следящего привода код на выходе преобразователя 10 будет таким, что частота на втором входе реверсивного счетчика 9 импульсов будет всегда равна частоте на первом входе реверсивного счетчика 9, т.е. д,ат ьы,о P этом частота интерполятора 3, приходящая на первый вход счетчика 4 рассогласования, всегда будет равна частоте датчика 7 положения на его втором входе, а на выходе счетчика 4 рассогласования будет всегда устанавливаться постоянный сигнал (пропорциональный ошибке по положению), величина которого будет зависеть от добротности следящего привода 1 и частоты интерполятора f(4 (ошибка по положению А
f U ч -г,
г). В зависимости от цены импульса Uw,
в следящей системе будет изменяться максимальная частота интерполятора fy и РИ диапазоне регулирования
рают равной
г fuwaKc
I быу о «нн 1 гр
Для определения величины тактовой частоты т с генератора 15 тактовой частоты следует в каждом случае исходить из объема реверсивного счетчика 9 импульсов. Тогда , где N - число разрядов реверсивного счетчика 9 импульсов. I
При дйтгр код К;, возникающий на выходе преобразователя 10 и счетчика 9, вырабатывает частоту ftp датгр на выходе преобразователя 10 код - частота, что приводит к установлению кода, равного нулю, после чего с приходом следующего импульса с датчика 7 положения опять возникает код K|m и все повторяется. Определитель 8 достижения позиции будет работать в этом случае в шаговом режиме и на выходе дешифратора 12 при обработке импульсов датчика 7 положения при будет возникать сигнал разрешения на прохождение информации с накопителя 2 информации на вход интерполятора 3, соответствующий определению - позиция достигнута.
35
40
т.е. при остановке датчика 7 положения и нулевой частоте на первом и втором входах реверсивного счетчика 9 импульсов, на выходе второго дешифратора 12 и втором входе накопителя появится сигнал разрешения на введение информации с фотосчитывающего блока в накопитель информации, тем самым достигается максимальное быстродействие, точность и надежность устройства.
Формула изобретения
1. Устройство для программного уп- с равления положением объекта, содержащее фотосчитывающий блок, накопитель информации, счетчик рассогласования, усилитель, исполнительный орган, датчик положения, подключенный к вычитаю- 5Q щему входу счетчика рассогласования, к суммирующему входу которого подключен выход интерполятора, выход счетчика рассогласования через усилитель соединен с входом исполнительного органа, первый вход накопителя соединен с выходом фотосчитывающего блока, а выход накопителя соединен с информационным входом интерполятора, отличающееся тем, что, с це35
40
т.е. при остановке датчика 7 положения и нулевой частоте на первом и втором входах реверсивного счетчика 9 импульсов, на выходе второго дешифратора 12 и втором входе накопителя появится сигнал разрешения на введение информации с фотосчитывающего блока в накопитель информации, тем самым достигается максимальное быстродействие, точность и надежность устройства.
Формула изобретения
1. Устройство для программного уп- с равления положением объекта, содержащее фотосчитывающий блок, накопитель информации, счетчик рассогласования, усилитель, исполнительный орган, датчик положения, подключенный к вычитаю- Q щему входу счетчика рассогласования, к суммирующему входу которого подключен выход интерполятора, выход счетчика рассогласования через усилитель соединен с входом исполнительного органа, первый вход накопителя соединен с выходом фотосчитывающего блока, а выход накопителя соединен с информационным входом интерполятора, отличающееся тем, что, с целью повышения быстродействия, точности и надежности устройства, оно снабжено определителем достижения позиции, вход которого подключен к выходу датчика положения, выход - к второму входу накопителя.
2. Устройство по п. 1, о т л и чающееся тем, что определитель достижения позиции содержит генератор тактовой частоты, преобразователь код - частота, реверсивный счетчик импульсов, блок сравнения, первый и второй дешифраторы, входы которых подключены к выходам соответ- ствующих разрядов реверсивного счетчика импульсов, суммирующий вход ко
торого подключен к выходу блока сравнения, первый вход которого соединен с выходом входного элемента, вход которого соединен с входом определителя, второй вход - с выходом первого дешифратора, вычитающий вход реверсивного счетчика импульсов подключен к выходу преобразователя код - частота, управляющий вход которого соединен с выходом первого разряда реверсивного счетчика импульсов, а тактовый вход - с выходом генератора тактовой частоты, выход второго дешифратора подключен к выходу определителя достижения позицииi вход которого соединен с входом входного элемента. I
| название | год | авторы | номер документа |
|---|---|---|---|
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Круговой интерполятор | 1988 |
|
SU1566321A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Программное задающее устройство для токарного станка с программным управлением | 1981 |
|
SU1012688A1 |
| Устройство для контроля систем программного управления станком | 1988 |
|
SU1580320A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для задания программы | 1979 |
|
SU862118A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
Изобретение относится к области числового программного управления и может быть использовано в системах управления координатными перемещениями исполнительных органов станков. Цель изобретения - повышение быстродействия, точности и надежности работы устройства. Устройство обеспечивает возможность определения момента действительной остановки исполнительного органа после отработки программы за счет введения определителя достижения позиции, состоящего из реверсивного счетчика импульсов, преобразователя код-частота, двух дешифраторов, элемента сравнения, входного элемента и генератора тактовой частоты. Принцип работы определителя достижения позиции заключается в обработке отрицательной обратной связи, что позволяет определить действительный конец отработки кадра исполнительным органом по команде "кок", которая в данном случае формируется при возникновении сигнала "Позиция достигнута", что дает возможность работать без использования кадров задержки времени. 1 з.п. ф-лы, 3 ил.
Вход
./
(0d
Фиг 2
Двтиети мт, Ус/пандМи/ееся Пимение,Уст/юМшееся Нижениг,.. куд на htxeie
аЛЙ eifmvuni 9 асргйтм 9-счгтчикаЗ с мохато/ Ы1Ы хввон ti -cvfrnuira 9
«
«L
L
;;
I III 11II
5 KoSOlOMO)
12
| Цифровая система позиционного регулирования | 1976 |
|
SU557353A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Вопросы программного управления металлорежущими станками | |||
| М.: Ино- страпная литература, 1959, с | |||
| . | |||
