Изобретение относится к области цифровых автоматических систем комбинированного регулирования и может быть использовано в следящих системах радиотелескопов, оптических телескопов, радиолокационных станций, а также в следящих приводах наведения и стабилизации с источником питания ограниченной мощности.
Известны автоматические системы комбинированного регулирования [1, стр. 233] , [2, стр. 714]. Их недостатком является ухудшение качества переходного процесса при увеличении добротности системы вследствие уменьшения запасов устойчивости, что приводит к увеличению времени перехода в режим слежения с высокой точностью.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является цифровая автоматическая система комбинированного регулирования [3] , принятая за прототип. Недостатком этого устройства является то, что при отработке входных воздействий привод кратковременно развивает большую мощность, вследствие чего снижается надежность системы, работающей от источника питания ограниченной мощности.
Изобретение направлено на повышение надежности системы.
Сущность изобретения заключается в следующем. При работе системы на вход привода через аналоговый сумматор поступают два сигнала - компенсирующий сигнал по первой производной, вырабатываемый дифференциатором, и откорректированный сигнал ошибки. При отработке скачкообразного входного воздействия на вход привода поступает откорректированный сигнал ошибки большой величины, вследствие чего привод при разгоне нагрузки развивает большое ускорение, что, в свою очередь, вызывает пиковое увеличение мощности, потребляемой от источника питания. Превышение допустимой потребляемой мощности может вызвать потерю работоспособности системы.
При отработке входного воздействия, изменяющегося с большой скоростью (например, гармонического входного воздействия или сигнала, изменяющегося с постоянной скоростью), на вход привода поступает сигнал большой величины с выхода дифференциатора, вследствие чего привод при переходе в режим слежения также развивает большую мощность. Для повышения надежности системы необходимо ограничение мощности, потребляемой от источника питания.
Указанный технический результат при осуществлении изобретения достигается тем, что в цифровую автоматическую систему комбинированного регулирования, содержащую цифровой сумматор, дифференциатор, вход которого соединен с первым входом цифрового сумматора, первый логический блок, вход которого соединен с выходом цифрового сумматора, первый блок ключей, первый вход которого соединен с выходом первого логического блока, первый и второй преобразователи код - напряжение, аналоговый сумматор, второй вход которого соединен с выходом второго преобразователя код - напряжение, а выход через привод и преобразователь вал - код соединен с вторым входом цифрового сумматора, включены первый задатчик интенсивности, выход которого соединен с первым входом цифрового сумматора, второй задатчик интенсивности, вход которого соединен с выходом дифференциатора, второй логический блок, вход которого соединен с выходом цифрового сумматора, и второй блок ключей, первый вход которого соединен с выходом второго логического блока, второй и третий входы соединены с выходами дифференциатора и второго задатчика интенсивности, а выход подключен к входу второго преобразователя код - напряжение, причем первый блок ключей соединен вторым входом с выходом цифрового сумматора, а выходом с входом первого преобразователя код - напряжение, выход которого соединен с первым входом аналогового сумматора.
В заявленном устройстве входное воздействие системы поступает на первый вход цифрового сумматора через первый задатчик интенсивности, что обеспечивает ограничение скорости изменения сигнала управления системой и плавность нарастания сигнала на первом входе аналогового сумматора. Уровень ограничения выбирается равным максимальной скорости изменения входного воздействия в режиме слежения.
При переходных процессах, возникающих при подаче на вход системы произвольных входных воздействий (гармонического, скачкообразного, сигнала, изменяющегося с постоянной скоростью), когда рассогласование системы имеет большую величину, сигнал с выхода дифференциатора подается на аналоговый сумматор через второй задатчик интенсивности, что обеспечивает ограничение скорости изменения сигнала, поступающего на второй вход аналогового сумматора. Следовательно, включение первого и второго задатчиков интенсивности обеспечивает ограничение скорости изменения сигнала управления приводом и тем самым ограничение развиваемого при разгонах ускорения и пиковой потребляемой мощности. Однако для эффективного уменьшения пиковой потребляемой мощности уровень ограничения скорости изменения выходного сигнала задатчика интенсивности в компенсирующем канале должен быть меньше максимального ускорения изменения входного воздействия в режиме слежения, что снижает динамическую точность и, следовательно, надежность работы системы. Поэтому в режиме слежения, когда рассогласование, вычисляемое цифровым сумматором, имеет малую величину, сигнал с выхода дифференциатора поступает на вход аналогового сумматора, минуя задатчик интенсивности, что обеспечивает высокую динамическую точность. Переключение цепей прохождения компенсирующего сигнала осуществляется вторым логическим блоком и вторым блоком ключей. Таким образом, совокупность включенных элементов обеспечивает повышение надежности системы.
На чертеже изображена схема заявляемого устройства.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем.
Цифровая автоматическая система комбинированного регулирования содержит последовательно соединенные первый задатчик интенсивности 1 и цифровой сумматор 2, второй вход которого соединен с выходом преобразователя вал - код 3. Выход цифрового сумматора 2 соединен с входами первого логического блока 4, второго логического блока 5 и вторым входом первого блока ключей 6, выход которого через первый преобразователь код - напряжение 7 соединен с первым входом аналогового сумматора 8. Выход аналогового сумматора 8 через привод 9 соединен с входом преобразователя вал - код 3. Первый вход первого блока ключей 6 соединен с выходом первого логического блока 4 К выходу первого задатчика интенсивности 1 подключен дифференциатор 10, выход которого соединен с входом второго задатчика интенсивности 11 и вторым входом второго блока ключей 12. Первый и третий входы второго блока ключей 12 соединены соответственно с выходом второго логического блока 5 и выходом второго задатчика интенсивности 11, а выход через второй преобразователь код - напряжение 13 соединен со вторым входом аналогового сумматора 8.
Цифровая автоматическая система комбинированного регулирования работает следующим образом.
Входное воздействие θ1, изменяющееся по любому закону, поступает на задатчик интенсивности 1, ограничивающий скорость изменения сигнала на входе дифференциатора 10 и первом входе цифрового сумматора 2, что обеспечивает ограничение скорости нарастания сигнала управления приводом по цепи ошибки при отработке скачкообразного входного воздействия. В цифровом сумматоре 2 по сигналу с выхода задатчика интенсивности 1 и сигналу главной обратной связи с преобразователя вал - код 3 вырабатывается сигнал рассогласования, который через блок ключей 6 и преобразователь код - напряжение 7 поступает на аналоговый сумматор 8. Логический блок 4, анализируя сигнал рассогласования, выдает команду на блок ключей 6 на установку коэффициента передачи, исходя из требуемых динамической точности и качества переходного процесса.
При подаче на вход системы, находящейся в неподвижном состоянии, входного воздействия (гармонического, скачкообразного или изменяющегося с постоянной скоростью) возникает кратковременный выброс рассогласования большой величины. Логический блок 5 вырабатывает команду, по которой блок ключей 12 пропускает на вход преобразователя код - напряжение 13 сигнал с задатчика интенсивности 11, что ограничивает скорость нарастания сигнала, поступающего с выхода преобразователя код - напряжение 13 на аналоговый сумматор 8 и далее на привод 9. Ограничение скорости изменения сигнала управления по компенсирующему каналу и по цепи ошибки обеспечивает ограничение мощности, потребляемой от источника питания на допустимом уровне.
При уменьшении рассогласования до 2-3o логический блок 5 вырабатывает команду, по которой блок ключей 12 пропускает на вход преобразователя код - напряжение 13 сигнал непосредственно с дифференциатора 10, что обеспечивает переход системы в режим слежения с высокой точностью.
Использование предлагаемого устройства в конкретной автоматической системе позволило уменьшить пиковую потребляемую мощность со 120 до 60 кВт.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации задатчика интенсивности, логического блока и блока ключей.
Источники информации
1. Ахметжанов А. А., Кочемасов А.В. Следящие системы и регуляторы. М.: Энергоатомиздат, 1986, - 288 с.
2. Бесекерский В. А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1975. - 768 с.
3. А.с. СССР N 488186 от 01.04.74. MПK6 G 05 B 11/01.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ПРИЕМНИК ШИРОКОПОЛОСНОГО СИГНАЛА | 1999 |
|
RU2157052C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ УЗКОПОЛОСНЫХ ПОМЕХ | 2002 |
|
RU2227369C2 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| Цифровая автоматическая система комбинированного регулирования | 1974 |
|
SU488186A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ДОПЛЕРОВСКОЙ ЧАСТОТЫ | 1990 |
|
RU2231085C2 |
| ЛИНИЯ РАДИОСВЯЗИ С ПОВТОРНЫМ ИСПОЛЬЗОВАНИЕМ ЧАСТОТЫ | 1999 |
|
RU2164726C2 |
Изобретение относится к области цифровых автоматических систем комбинированного регулирования и может быть использовано в следящих системах радиотелескопов, оптических телескопов, радиолокационных станций, а также в следящих приводах наведения и стабилизации с источником питания ограниченной мощности. Технический результат - повышение надежности системы. Результат достигается включением на вход системы первого задатчика интенсивности, а также включением в компенсирующий канал по первой производной от входного воздействия последовательно с дифференциатором второго задатчика интенсивности и блока ключей, пропускающего по компенсирующему каналу либо сигнал с задатчика интенсивности, либо сигнал непосредственно с дифференциатора. Управление блоком ключей осуществляется логическим блоком, анализирующим текущую величину рассогласования. 1 ил.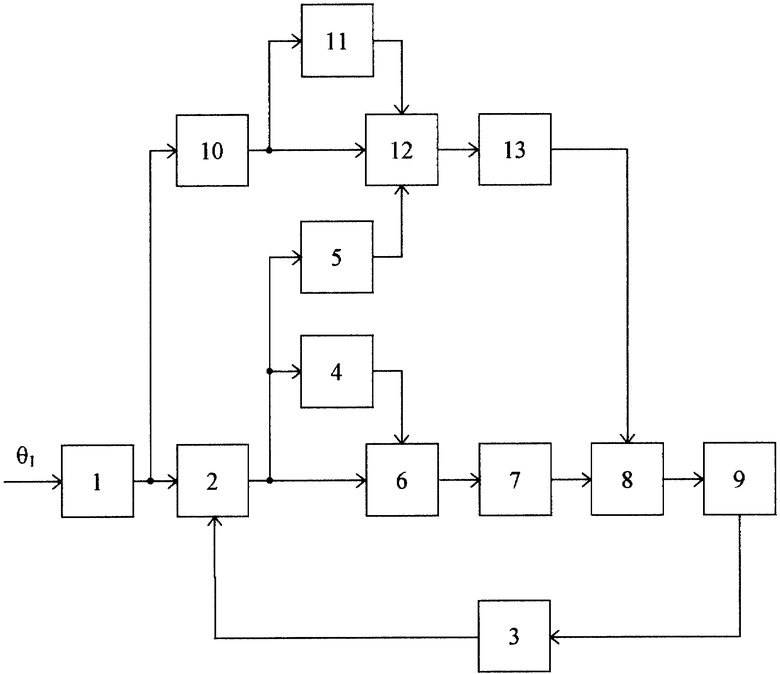
Цифровая автоматическая система комбинированного регулирования, содержащая цифровой сумматор, дифференциатор, вход которого соединен с первым входом цифрового сумматора, первый блок ключей с устанавливаемым коэффициентом передачи, первый логический блок, предназначенный для управления первым блоком ключей в зависимости от величины рассогласования, вход которого соединен с выходом цифрового сумматора, первый и второй преобразователи код - напряжение, аналоговый сумматор, второй вход которого соединен с выходом второго преобразователя код - напряжение, а выход через привод и преобразователь вал - код соединен с вторым входом цифрового сумматора, отличающаяся тем, что в нее введены первый задатчик интенсивности, выход которого соединен с первым входом цифрового сумматора, второй задатчик интенсивности, вход которого соединен с выходом дифференциатора, второй блок ключей, предназначенный для подключения к входу второго преобразователя код - напряжение либо сигнала с выхода дифференциатора, либо сигнала с выхода второго задатчика интенсивности, и второй логический блок, предназначенный для управления вторым блоком ключей в зависимости от сигнала рассогласования, вход которого соединен с выходом цифрового сумматора, причем первый блок ключей соединен вторым входом с выходом цифрового сумматора, а выходом - с входом первого преобразователя код - напряжение, выход которого соединен с первым входом аналогового сумматора.
| Цифровая автоматическая система комбинированного регулирования | 1974 |
|
SU488186A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ЦИФРОВОГО ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНОГО РЕГУЛЯТОРА | 1989 |
|
RU2012033C1 |

