Изобретение относится к медицинской технике, в частности к элементам устройств содействия ходьбе в заранее предопределенных режимах движения пользователей с нарушением функций опорно-двигательного аппарата, с ограниченной подвижностью или полной неподвижностью нижних конечностей при нормальном функционировании верхних конечностей и верхней части корпуса. Изобретение обеспечивает возможность ходьбы пользователя с нарушением функций опорно-двигательного аппарата по горизонтальной и наклонной опорной поверхности, а также по лестничным маршам и переход через препятствия, а также может применяться при проведении реабилитационно-восстановительных процедур.
Известен аппарат для передвижения человека с нарушением опорно-двигательных функций, содержащий левую и правую ручные опоры в виде костылей и активный экзоскелет нижних конечностей, выполненный с возможностью крепления его к ножным конечностям и корпусу тела человека. Ручные опоры снабжены органами управления, обеспечивающими управление приводами звеньев экзоскелета и коленными тормозами [US 7998096 В1, опубл. 16.08.2011].
В данном устройстве ручные опоры - костыли соединены с экзоскелетом проводными каналами обмена данными. В нем невозможно обеспечить согласованное движение всех приводов, а само оно может обеспечить движение пользователя только в пошаговом режиме и не может обеспечить ходьбу пользователя, близкую к естественной. Указанные факторы отрицательно влияют на эргономические характеристики устройства в целом.
Наиболее близким к предлагаемому изобретению является комплект костылей пользователя моторизованного экзоскелета, содержащих опорные корпусы, выполненные с возможностью регулирования их продольных размеров и снабженные опорными рукоятками, при этом первый костыль содержит микроконтроллер и первый аккумулятор, соединенные между собой, а также приемопередатчик и кнопки «Вкл/Выкл», «Старт/Стоп» и «Режим движения», подключенные к первому, второму, третьему и, соответственно, четвертому портам микроконтроллера, причем кнопки «Вкл/Выкл», «Старт/Стоп» и «Режим движения» смонтированы в опорной рукоятке первого костыля, экзоскелет выполнен с возможностью прикрепления к пользователю и включает корпус и ножные опоры, содержит второй аккумулятор, смонтированный в корпусе или в ножных опорах экзоскелета, первую часть распределенной вычислительной сети, включающую в том числе головной контроллер, смонтированный в корпусе или в ножных опорах экзоскелета, при этом вторая часть распределенной вычислительной сети включает микроконтроллер, при этом обе части бортовой вычислительной сети соединены между собой беспроводным каналом связи, а сам экзоскелет выполнен с возможностью передвижения в сагиттальной плоскости в заранее предопределенных режимах движения [заявка на изобретение № US 2013/0158445 А1, опубл. 20.06.2013].
Данное изобретение имеет следующие недостатки:
- отсутствует возможность контроля заряда аккумуляторов и возможность инструментального подтверждения заданного режима движения, что негативно отражается на безопасности движения пользователя;
- отсутствует проверка начального положения пользователя в момент начала движения, что может привести к потере равновесия и падению пользователя;
- отсутствует возможность аварийного отключения экзоскелета при падении костыля или пользователя;
- отсутствует возможность блокировки кнопок костыля в горизонтальном положении, что исключает ложное срабатывание, например, при падении костыля.
Указанные недостатки отрицательно влияют на безопасность пользователя, функциональные возможности и эргономические характеристики устройства содействия ходьбе в целом.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является улучшение эргономических характеристик и расширение функциональных возможностей устройства и повышение безопасности пользователя.
Для достижения указанных технических результатов в известное изобретение, содержащее Комплект костылей пользователя моторизованного экзоскелета, содержащих опорные корпусы, выполненные с возможностью регулирования их продольных размеров и снабженные опорными рукоятками, при этом первый костыль содержит микроконтроллер и первый аккумулятор, соединенные между собой, а также приемопередатчик и кнопки «Вкл/Выкл», «Старт/Стоп» и «Режим движения», подключенные к первому, второму, третьему и, соответственно, четвертому портам микроконтроллера, причем кнопки «Вкл/Выкл», «Старт/Стоп» и «Режим движения» смонтированы в опорной рукоятке первого костыля, экзоскелет выполнен с возможностью прикрепления к пользователю и включает корпус и ножные опоры, содержит второй аккумулятор, смонтированный в корпусе или в ножных опорах экзоскелета, первую часть распределенной вычислительной сети, включающую в том числе головной контроллер, смонтированный в корпусе или в ножных опорах экзоскелета, при этом вторая часть распределенной вычислительной сети включает микроконтроллер, при этом обе части бортовой вычислительной сети соединены между собой беспроводным каналом связи, а сам экзоскелет выполнен с возможностью передвижения в сагиттальной плоскости в заранее предопределенных режимах движения, при этом в первый костыль комплекта дополнительно введены датчик силы реакции опоры, трехосевой акселерометр и дисплей, подключенные к пятому, шестому и, соответственно, седьмому портам микроконтроллера.
Кроме того, в качестве заранее предопределенных режимов движения экзоскелета использованы режимы «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
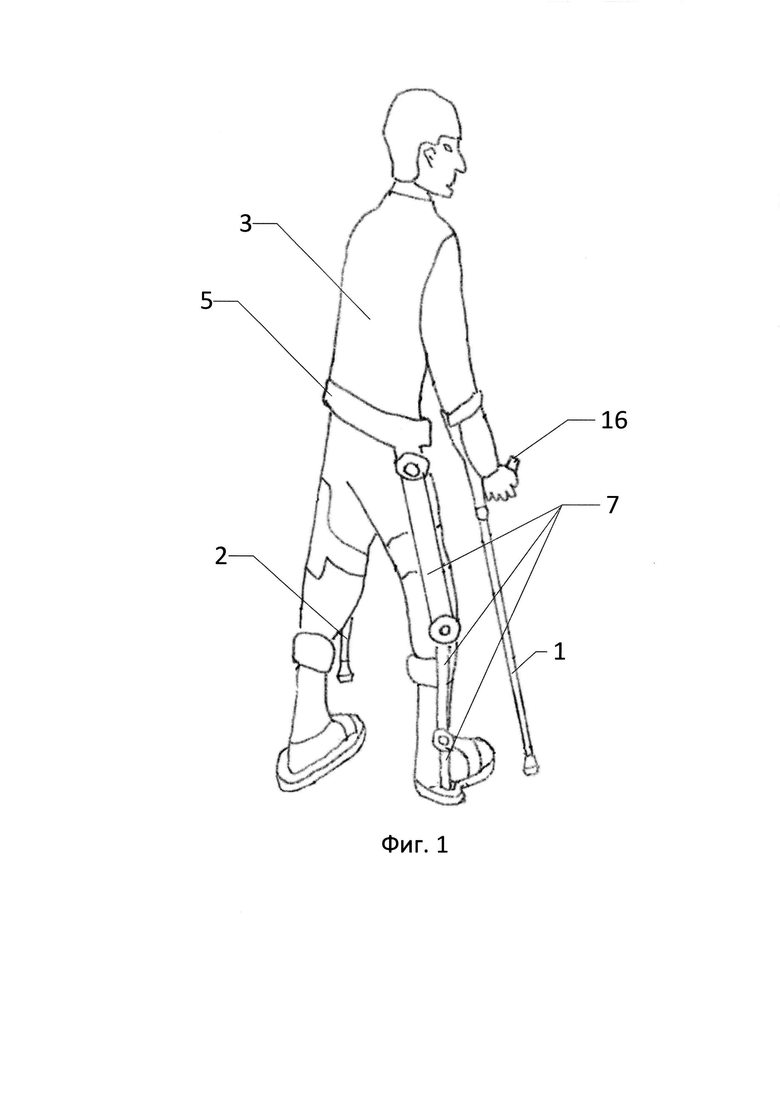
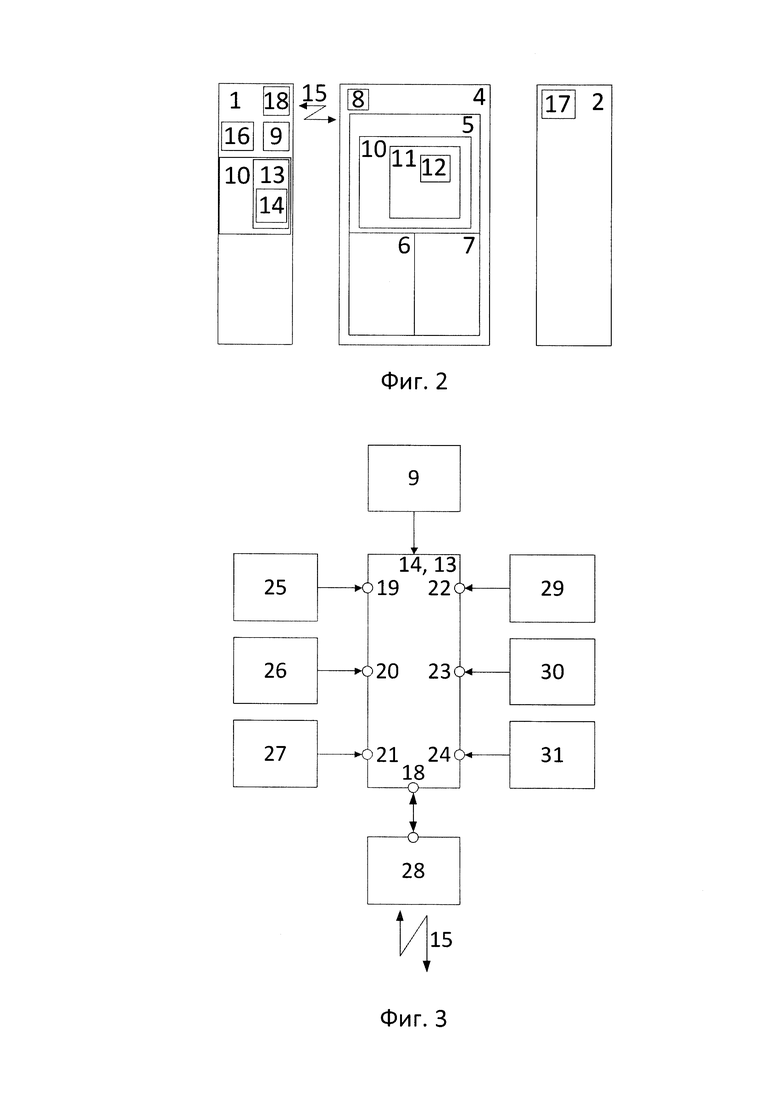
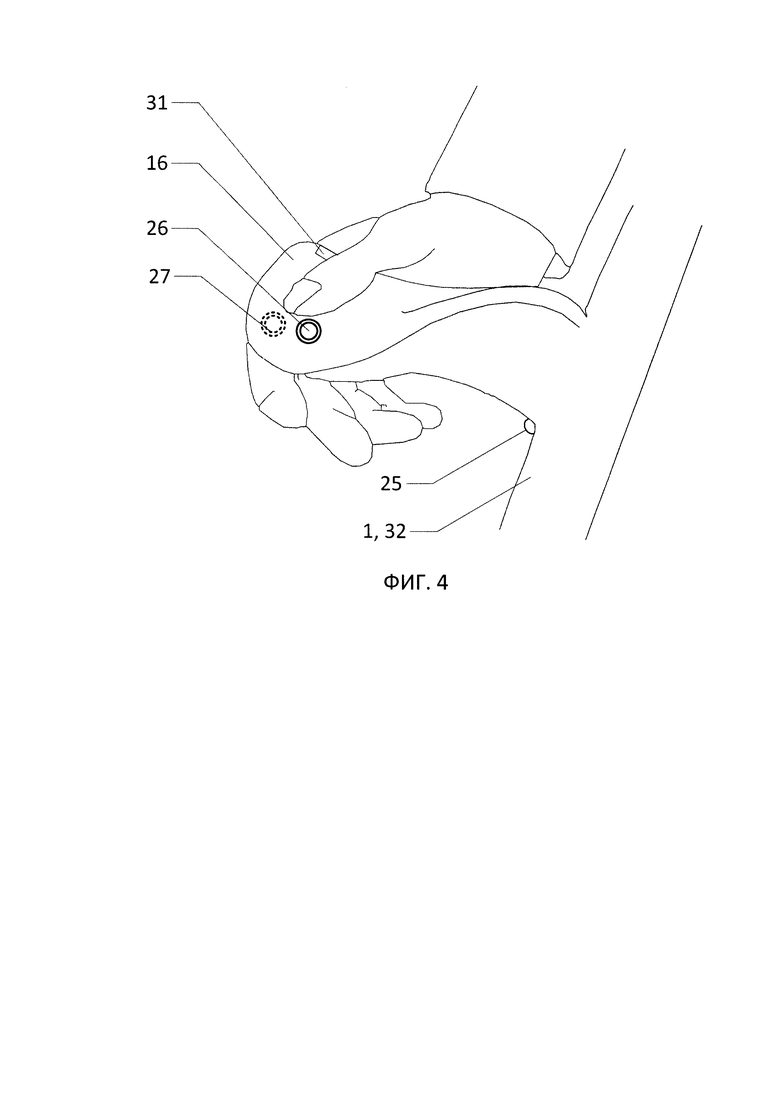
На фиг. 1 приведен общий вид пользователя с надетым на него экзоскелетом. На фиг. 2 схематически показаны элементы экзоскелета и «интеллектуального» костыля, связанные беспроводным каналом связи. На фиг. 3 приведена структурная схема второй части распределенной бортовой вычислительной сети, разнесенной на «интеллектуальном» костыле. На фиг. 4 приведен общий вид рукоятки костыля, с размещенными на ней кнопками управления и дисплеем.
На фигурах 1, 2, 3 и 4 обозначены:
1, 2 - первый и, соответственно, второй костыли;
3 - пользователь;
4 - моторизованный экзоскелет;
5 - корпус экзоскелета;
6, 7 - левая и соответственно правая ножные опоры экзоскелета;
8 - второй аккумулятор;
9 - первый аккумулятор;
10 - распределенная бортовая вычислительная сеть;
11 - первая часть распределенной бортовой вычислительной сети;
12 - головной контроллер экзоскелета;
13 - вторая часть распределенной бортовой вычислительной сети;
14 - микроконтроллер;
15 - беспроводной канал связи;
16, 17 - опорные рукоятки левого и, соответственно, правого костыля;
18, 19, 20 и 21 - первый, второй, третий и, соответственно четвертый порты микроконтроллера;
22, 23 и 24 - пятый, шестой и, соответственно, седьмой порты микроконтроллера;
25 - кнопка «Вкл/Выкл»;
26 - кнопка «Старт/Стоп» (управляющая кнопка);
27 - кнопка «Режим движения» (управляющая кнопка);
28 - приемопередатчик;
29- датчик силы реакции опоры;
30 - трехосевой акселерометр;
31 - дисплей;
32 и 33 - опорные корпусы первого и, соответственно, второго костылей.
Комплект костылей 1 и 2 пользователя 3 моторизованного экзоскелета 4 содержит опорные корпусы 32 и 33, выполненные с возможностью регулирования их продольных размеров и снабженные опорными рукоятками 16 и 17, при этом первый костыль 1 содержит микроконтроллер 14 и первый аккумулятор 9, соединенные между собой, а также приемопередатчик 28 и кнопки «Вкл/Выкл» 25, «Старт/Стоп» 26 и «Режим движения» 27, подключенные к первому 18, второму 19, третьему 20 и, соответственно, четвертому 21 портам микроконтроллера 14, причем кнопки «Вкл/Выкл» 25, «Старт/Стоп» 26 и «Режим движения» 27 смонтированы в опорной рукоятке 16 первого костыля 1, при этом экзоскелет 4 выполнен с возможностью прикрепления к пользователю 3 и включает корпус 5 и ножные опоры 6 и 7, второй аккумулятор 8, смонтированный в корпусе 5 или в ножных опорах 6 или 7 экзоскелета 4, первую часть 11 распределенной вычислительной сети 10, включающую в том числе головной контроллер 12, смонтированный в корпусе 5 или в ножных опорах 6 или 7 экзоскелета, при этом вторая часть 13 распределенной вычислительной сети 10 включает микроконтроллер 14, при этом обе части 11 и 13 бортовой вычислительной сети 10 соединены между собой беспроводным каналом связи 15, а сам экзоскелет 4 выполнен с возможностью передвижения в сагиттальной плоскости в заранее предопределенных режимах движения.
Кроме того, первый костыль 1 комплекта содержит датчик 29 силы реакции опоры, трехосевой акселерометр 30 и дисплей 31, подключенные к пятому 22, шестому 23 и, соответственно, седьмому 24 портам микроконтроллера 14.
При этом в качестве заранее предопределенных режимов движения экзоскелета использованы режимы «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
Для управления экзоскелетом с помощью «интеллектуального» костыля необходимо выполнить следующие действия.
1. Подсоединить цепи питания экзоскелета 4 к клеммам второго аккумулятора 8.
2. Включить питание первого костыля 1 кнопкой «Вкл/Выкл» 25.
3. Дождаться появления индикации на дисплее 31, что свидетельствует об установлении связи между первым костылем 1 и экзоскелетом 4.
4. Кнопкой «Режим движения» 27 на первом костыле 1 произвести выбор нужного режима движения; при этом информация о выбранном режиме движения будет отображена на дисплее 31 в виде соответствующей пиктограммы.
5. После выбора требуемого режима движения необходимо нажать кнопку «Старт/Стоп» 20.
В результате осуществляется проверка положения первого костыля 1 (вертикальное или горизонтальное), проверка положения пользователя 3 с помощью датчика 29 силы реакции опоры; в случае правильности положения первого костыля 1 и пользователя 3 на дисплее 31 начинается отсчет времени (4 секунды) и запускается выбранный режим движения.
В случае ошибочного запуска режима, у пользователя есть возможность повторно нажать кнопку «Старт/Стоп» для отмены выбранного режима.
Подтверждением заявленного технического результата является предоставление пользователю следующих дополнительных возможностей, придающих костылю «интеллектуальные» функции.
1. Включение/выключение питания костыля осуществляется при помощи кнопки «Вкл/Выкл» 25, которая для защиты от случайного нажатия смонтирована под опорной рукояткой 16, что положительно сказывается на безопасности пользователя.
2. Смена режима движения осуществляется либо нажатием на кнопку «Режим движения» 27, либо вращением первого костыля 1 на 15-20 градусов вокруг вертикальной оси (задействуется трехосевой акселерометр 27).
3. Запуск/остановка экзоскелета осуществляется по нажатию кнопки «Старт/Стоп» 26.
4. Защита от случайного срабатывания (например, при падении первого костыля 1 на пол) осуществляется при помощи трехосевого акселерометра 27; костыль 1 реагирует на нажатия кнопок управления при отклонении его от вертикальной оси не более чем на 45°, а в горизонтальном положении, т.е. при отклонении костыля от вертикальной оси более, чем на 45°, автоматически отключаются все ранее включенные режимы и управляющие кнопки блокируются.
5. Информирование о наличии/отсутствии связи первого костыля 1 с экзоскелетом 4, производится путем отображения значка режима при подключении на дисплее 31.
6. Информация о выбранном режиме движения отображается на дисплее 31.
7. Информация о заряде первого и второго аккумуляторов 9 и 8 отображается на дисплее 31.
8. В случае, если пользователь 3 в момент начала движения согласно режиму «Идти по горизонтальной поверхности» из положения «стоя» не будет опираться на костыль, что будет идентифицировано датчиком 29 силы реакции опоры, то выбранный режим не будет активирован и экзоскелет 4 не начнет движение.
9. В случае падения первого костыля 1, это определяется трехосевым акселерометром 30 и автоматически отключаются все запущенные режимы и блокируются управляющие кнопки.
Таким образом, данному изобретению присущ ряд «интеллектуальных» свойств, которые позитивно влияют на безопасность пользователя, эргономические характеристики и функциональные возможности устройств содействия ходьбе.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ПОЛЬЗОВАТЕЛЮ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ | 2016 |
|
RU2620500C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ С СИСТЕМОЙ ОПРЕДЕЛЕНИЯ ЖЕЛАТЕЛЬНЫХ ПАРАМЕТРОВ ШАГА В СРЕДЕ С ПРЕПЯТСТВИЯМИ | 2016 |
|
RU2636419C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| НАКАБЛУЧНИК БАШМАКА ПОЛЬЗОВАТЕЛЯ ЭКЗОСКЕЛЕТА | 2016 |
|
RU2649427C2 |
| СТОПА ЭКЗОСКЕЛЕТА | 2016 |
|
RU2644547C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ СТОПЫ И ФАЗЫ ДВИЖЕНИЯ НОЖНОЙ ОПОРЫ ЭКЗОСКЕЛЕТА И ИНТЕГРИРОВАННАЯ СТОПА ЭКЗОСКЕЛЕТА | 2017 |
|
RU2675467C2 |
| СПОСОБ ЧЕТЫРЕХОПОРНОГО ПЕРЕДВИЖЕНИЯ ДЕТСКОГО ЭКЗОСКЕЛЕТА | 2019 |
|
RU2739278C2 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| Способ выработки управляющих сигналов и способ ручного управления работой экзоскелетона нижних конечностей на его основе, а также интерфейсы управления работой указанного экзоскелетона в режиме ручного и программного управления, использующие указанный способ выработки | 2016 |
|
RU2638276C1 |
Изобретение относится к медицинской технике, в частности к элементам устройств содействия ходьбе - «интеллектуальным» костылям для передвижения в заранее предопределенных режимах. Комплект костылей включает опорные корпусы костылей, выполненные с возможностью регулирования их продольных размеров, снабженные опорными рукоятками, первый костыль содержит соединенные микроконтроллер и первый аккумулятор, приемопередатчик и кнопки «Вкл/Выкл», «Старт/Стоп» и «Режим движения», подключенные к первому, второму, третьему и четвертому портам микроконтроллера. Кнопки «Вкл/Выкл», «Старт/Стоп» и «Режим движения» смонтированы в опорной рукоятке первого костыля. Экзоскелет прикрепляется к пользователю и включает корпус и ножные опоры, второй аккумулятор в корпусе или в ножных опорах, первую часть распределенной вычислительной сети, включающую головной контроллер в корпусе или в ножных опорах экзоскелета. Вторая часть распределенной вычислительной сети включает микроконтроллер, и обе части бортовой вычислительной сети соединены беспроводным каналом связи, а сам экзоскелет выполнен с возможностью передвижения в сагиттальной плоскости в заранее предопределенных режимах движения. В первый костыль комплекта введены датчик силы реакции опоры, трехосевой акселерометр и дисплей, подключенные к пятому, шестому и седьмому портам микроконтроллера. Использование изобретения позволяет расширить функциональные возможности управления экзоскелетом. 1 з.п. ф-лы, 4 ил.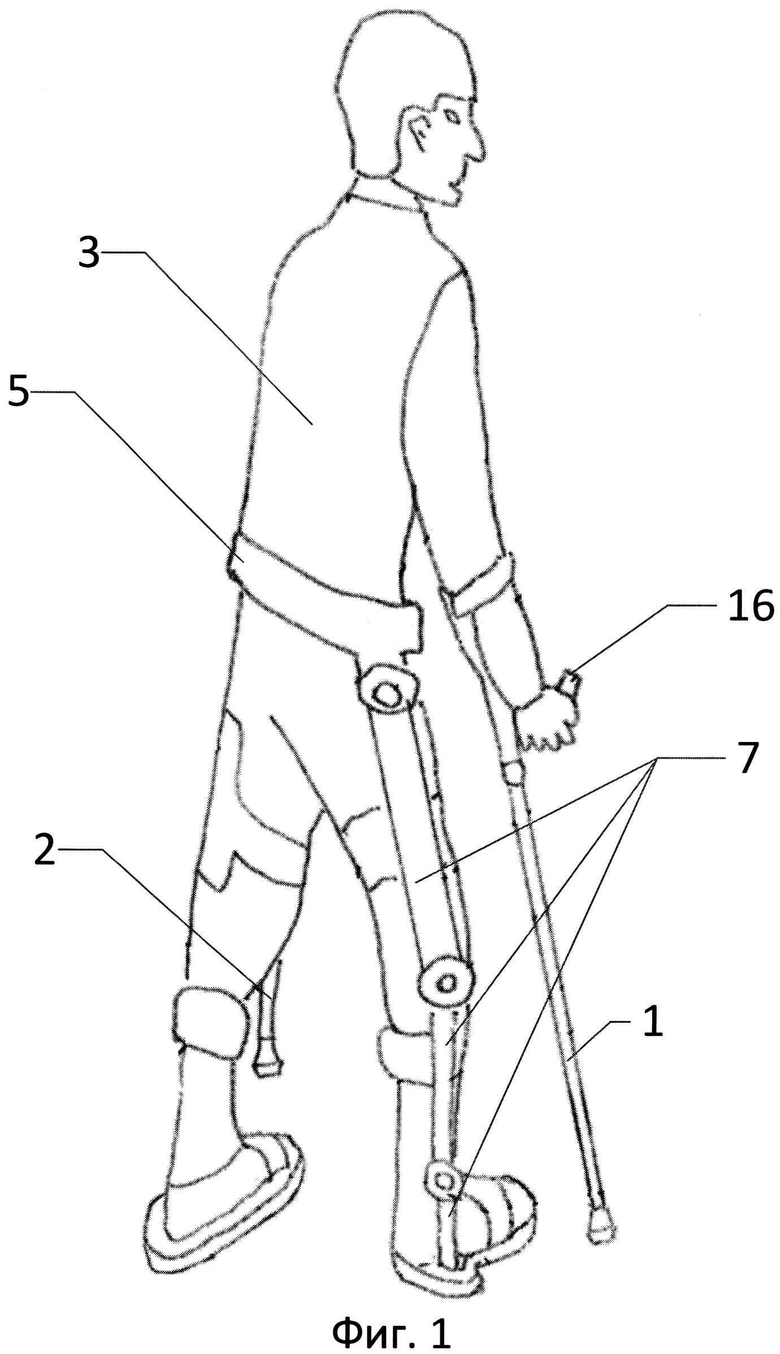
1. Комплект костылей пользователя моторизованного экзоскелета, содержащий опорные корпусы костылей, выполненные с возможностью регулирования их продольных размеров и снабженные опорными рукоятками, при этом первый костыль содержит микроконтроллер и первый аккумулятор, соединенные между собой, а также приемопередатчик и кнопки «Вкл/Выкл», «Старт/Стоп» и «Режим движения», подключенные к первому, второму, третьему и, соответственно, четвертому портам микроконтроллера, причем кнопки «Вкл/Выкл», «Старт/Стоп» и «Режим движения» смонтированы в опорной рукоятке первого костыля, экзоскелет выполнен с возможностью прикрепления к пользователю и включает корпус и ножные опоры, содержит второй аккумулятор, смонтированный в корпусе или в ножных опорах экзоскелета, первую часть распределенной вычислительной сети, включающую в том числе головной контроллер, смонтированный в корпусе или в ножных опорах экзоскелета, при этом вторая часть распределенной вычислительной сети включает микроконтроллер, при этом обе части бортовой вычислительной сети соединены между собой беспроводным каналом связи, а сам экзоскелет выполнен с возможностью передвижения в сагиттальной плоскости в заранее предопределенных режимах движения, отличающийся тем, что в первый костыль комплекта дополнительно введены датчик силы реакции опоры, трехосевой акселерометр и дисплей, подключенные к пятому, шестому и, соответственно, седьмому портам микроконтроллера.
2. Комплект костылей пользователя моторизованного экзоскелета по п. 1, отличающийся тем, что в качестве заранее предопределенных режимов движения экзоскелета использованы режимы «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
| US 2013158445 A1 20.06.2013 | |||
| US 2014196757 A1 17.07.2014 | |||
| US 7998096 B1 16.08.2011 | |||
| US 2014142475 A1 22.05.2014 | |||
| WO 2014159577 A1 02.10.2014 | |||
| НОСИМОЕ ВСПОМОГАТЕЛЬНОЕ УСТРОЙСТВО, СОДЕЙСТВУЮЩЕЕ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ, И УПРАВЛЯЮЩАЯ ПРОГРАММА | 2005 |
|
RU2364385C2 |

