Изобретение относится к медицинской технике, в частности к техническим средствам реабилитации инвалидов, и может быть использовано для расширения диапазона желаемых траекторий движения экзоскелета, предназначенного преимущественно для детей с нарушением функций опорно-двигательного аппарата.
Известны простые способы обучения детей ползанию на четвереньках, которыми пользуются на начальных этапах реабилитации больных, например, ДЦП (см. патент US 8,942,874 B2) с последующим переходом к более сложным способам с применением ходунков, беговых дорожек, экзоскелетов, костылей и т.п.
Недостатком известных способов следует считать наличие необходимого периода адаптации к новым реабилитационным условиям для пользователя, который не всегда для детей преодолим и вынуждает по нескольку раз возвращаться к более простым способам реабилитации.
Известен способ задания желаемых траекторий движения экзоскелета для передвижения пользователя с нарушением функций опорно-двигательного аппарата (см. патент WO 2017069652), обеспечивающий возможность ходьбы в заранее предопределенных режимах пользователя.
Недостатком известного способа является невозможность обеспечения устойчивого передвижения экзоскелета на четвереньках вследствие отсутствия датчиков реакции опоры на коленях и ладонях рук, что снижает безопасность пациента, обусловленную возможностью опрокидывания экзоскелета с пользователем.
Наиболее близким к предложенному изобретению является способ передвижения больных в большинстве известных экзоскелетов, например, реализуемый известной испанской компанией “MarsiBionics” (см. патент US 20170340504 A1), принятый в качестве прототипа и который предполагает принудительное передвижение пользователя с нарушением функций опорно-двигательного аппарата по горизонтальной поверхности за счет экзоскелета нижних конечностей с опорой на стопы, при этом стопы снабжены датчиками реакции опоры, интегрированными в контроллер экзоскелета, по заранее предопределенному алгоритму.
Недостатком этого способа следует считать утомительное однообразие траекторий движений пользователя, что снижает эффективность реабилитации пользователя, поскольку детей всегда привлекает разнообразие возможных движений.
Технической задачей, на решение которой направлено предложенное изобретение является расширение функциональных возможностей экзоскелета, повышающее эффективность процесса реабилитации.
Поставленная техническая задача решается за счет того, что при движении на четырех опорах на коленях и ладонях рук датчики реакции опоры фиксируют положение конечностей пользователя относительно опорной поверхности, что обеспечивает возможность синхронизации работы бедренных и коленных приводов для обеспечения устойчивого положения пользователя.
Сущность изобретения поясняется рисунками, где:
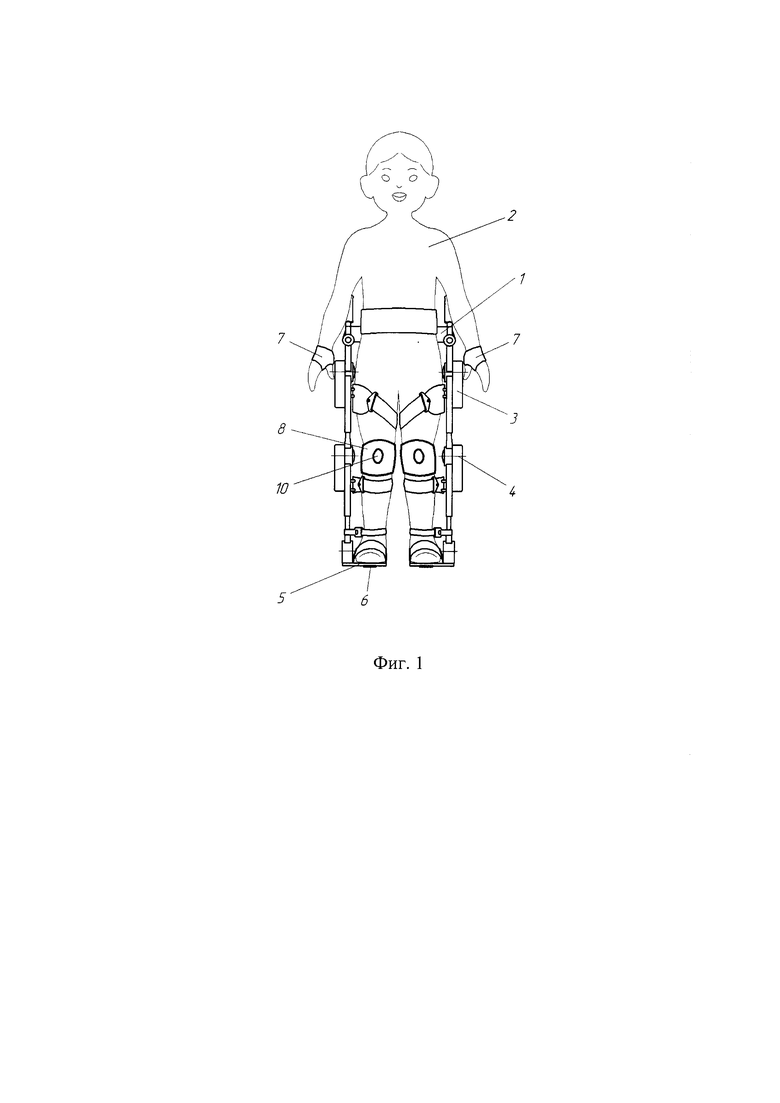
на фиг.1 изображен детский экзоскелет с пользователем, вид спереди;
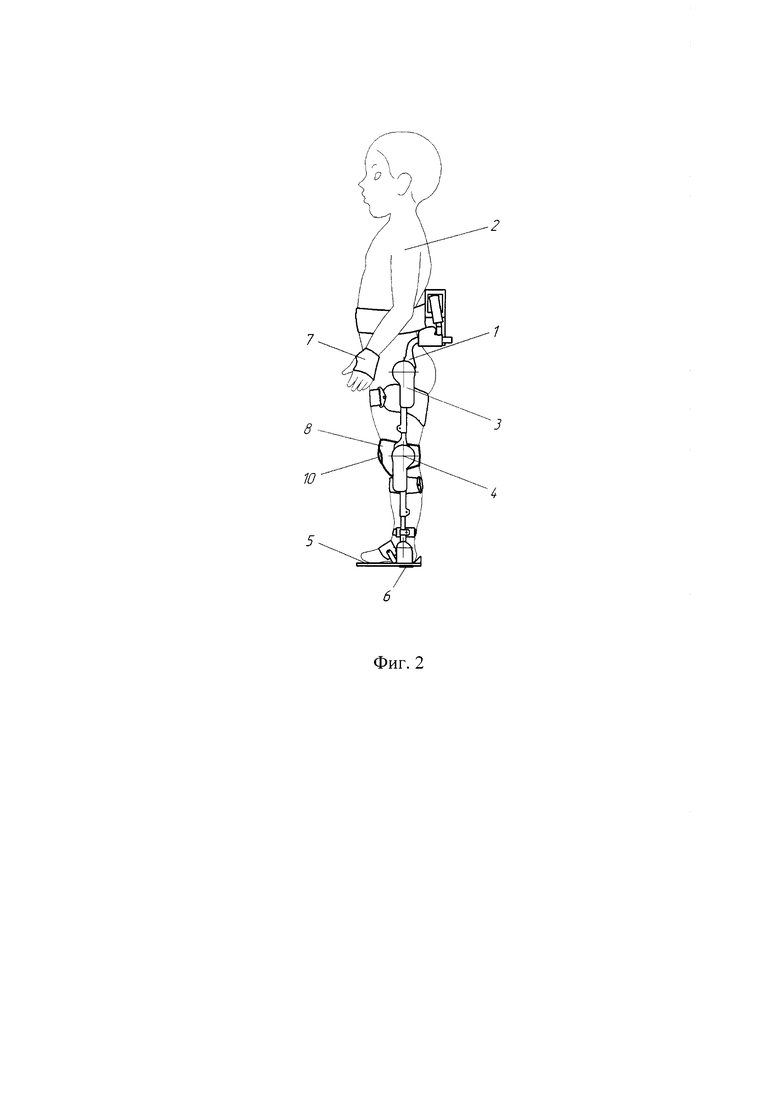
на фиг.2 изображен детский экзоскелет с пользователем, вид сбоку;
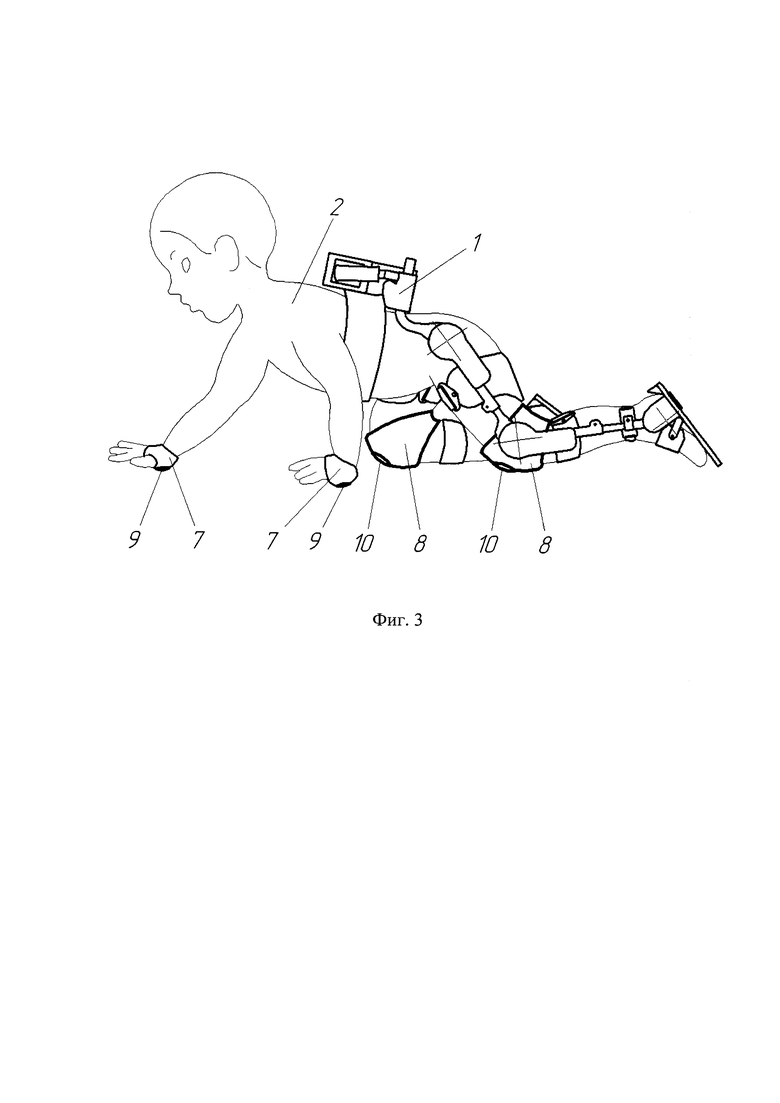
на фиг.3 - четырехопорное передвижение пользователя в экзоскелете.
Способ четырехопорного передвижения детского экзоскелета реализуется с помощью экзоскелета 1, представляющего собой охватывающий пользователя 2 шарнирный каркас, и осуществляющего принудительное передвижение за счет бедренных и коленных приводов 3 и 4 соответственно. Экзоскелет содержит также стопы 5, снабженные датчиками реакции опоры 6. При этом на руках и коленях пользователя 2 надеты опорные элементы 7 и 8 с датчиками реакции опоры 9 и 10 соответственно.
Способ четырехопорного передвижения детского экзоскелета реализуется следующим образом. При четырехопорном передвижении с опорой на колени и руки пользователя 2 датчики реакции опоры 9 и 10 фиксируют положение конечностей пользователя 2 относительно опорной поверхности, что обеспечивает возможность синхронизации работы бедренных и коленных приводов 3 и 4 для обеспечения устойчивого положения пользователя.
Предложенный способ позволяет повысить безопасность и комфортность пользователя при четырехопорном передвижении и, как следствие, расширить функциональные возможности и повысить реабилитационный эффект применения экзоскелета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ снижения повышенного мышечного тонуса при последствиях перинатального поражения ЦНС | 2016 |
|
RU2615869C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ | 2018 |
|
RU2698364C1 |
| Способ стимуляции двигательных навыков у детей с несовершенным остеогенезом на первом году жизни | 2020 |
|
RU2726464C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ И КООРДИНАЦИИ У ДЕТЕЙ В РАННЕЙ РЕАБИЛИТАЦИИ ПОЗВОНОЧНО-СПИННОМОЗГОВОЙ ТРАВМЫ С ПРИМЕНЕНИЕМ ИГРОВОГО МЕТОДА | 2014 |
|
RU2567796C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ МЫШЕЧНОГО ТОНУСА У ДЕТЕЙ СО СПАСТИЧЕСКИМИ ФОРМАМИ ЦЕРЕБРАЛЬНОГО ПАРАЛИЧА | 2011 |
|
RU2482827C2 |
| СПОСОБ ФИЗИЧЕСКОЙ РЕАБИЛИТАЦИИ ДЕТЕЙ С КОМПРЕССИОННЫМИ ПОВРЕЖДЕНИЯМИ ПОЗВОНОЧНИКА | 2011 |
|
RU2464962C1 |
| СПОСОБ СОЗДАНИЯ МЫШЕЧНОЙ ПАМЯТИ У ДЕТЕЙ С НАРУШЕНИЯМИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ | 2019 |
|
RU2723224C1 |
| МОДУЛЬНЫЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ | 2017 |
|
RU2659132C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ И ПОЗНАВАТЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ ДЕТЕЙ НА РАННЕЙ СТАДИИ РЕАБИЛИТАЦИИ ТЯЖЕЛОЙ ЧЕРЕПНО-МОЗГОВОЙ ТРАВМЫ | 2009 |
|
RU2428161C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ ЭКЗОСКЕЛЕТА С ПОЛЬЗОВАТЕЛЕМ | 2019 |
|
RU2737498C2 |
Изобретение относится к медицине, а именно к способам передвижения экзоскелетов. Способ четырехопорного передвижения детского экзоскелета с бедренными и коленными приводами включает принудительное передвижение пользователя с нарушением функций опорно-двигательного аппарата по горизонтальной поверхности за счет экзоскелета нижних конечностей. При движении на четырех опорах на коленях и ладонях рук датчики реакции опоры фиксируют положение конечностей пользователя относительно опорной поверхности, что обеспечивает возможность синхронизации работы бедренных и коленных приводов для обеспечения устойчивого положения пользователя. Достигается расширение функциональных возможностей экзоскелета. 3 ил.
Способ четырехопорного передвижения детского экзоскелета с бедренными и коленными приводами, включающий принудительное передвижение пользователя с нарушением функций опорно-двигательного аппарата по горизонтальной поверхности за счет экзоскелета нижних конечностей, отличающийся тем, что при движении на четырех опорах на коленях и ладонях рук датчики реакции опоры фиксируют положение конечностей пользователя относительно опорной поверхности, что обеспечивает возможность синхронизации работы бедренных и коленных приводов для обеспечения устойчивого положения пользователя.

