Группа изобретений относится к технике охранной сигнализации и может быть использована для защиты от любых аварийных ситуаций, например возникновения пожара, вторжения в жилье и офисы, склады и любые другие здания и сооружения.
Часто перед правоохранительными органами стоит задача получить текущее видеоизображение в определенной географической точке в режиме «он-лайн» или получить ретроспективные данные из архива.
Географическая система координат
Географическая система координат включает широту, долготу и высоту.
Широта - угол φ между местным направлением зенита и плоскостью экватора, отсчитываемый от 0° до 90° в обе стороны от экватора. Географическую широту точек, лежащих в северном полушарии (северную широту), принято считать положительной, широту точек в южном полушарии - отрицательной. О широтах, близких к полюсам, принято говорить как о высоких, а о близких к экватору - как о низких.
Из-за отличия формы Земли от шара географическая широта точек несколько отличается от их геоцентрической широты, т.е. от угла между направлением на данную точку из центра Земли и плоскостью экватора.
Широту места можно определить с помощью таких астрономических инструментов как секстант или гномон (прямое измерение), также можно воспользоваться системами GPS или ГЛОНАСС (косвенное измерение).
Долгота - угол λ между плоскостью меридиана, проходящего через данную точку, и плоскостью начального нулевого меридиана, от которого ведется отсчет долготы. Долготы от 0° до 180° к востоку от нулевого меридиана называют восточными, к западу - западными. Восточные долготы принято считать положительными, западные - отрицательными.
Выбор нулевого меридиана произволен и зависит только от соглашения. Сейчас за нулевой меридиан принят Гринвичский меридиан, проходящий через обсерваторию в Гринвиче, на юго-востоке Лондона
Высота-высота над уровнем моря
Географическая система координат объекта
В навигации в качестве начала системы координат выбирается центр масс транспортного средства (ТС). Переход начала координат из инерциальной системы координат в географическую (т.е. из OiB Og) осуществляется исходя из значений широты и долготы. Координаты центра географической системы координат Ogв инерциальной принимают значения (при расчете по шарообразной модели Земли):
где R - радиус земли, U - угловая скорость вращения Земли, h - высота над уровнем моря.
Ориентация осей в географической системе координат (ГСК) выбирается по алгоритму.
Ось X (другое обозначение - ось Е) - ось, направленная на восток.
Ось Y (другое обозначение - ось N) - ось, направленная на север.
Ось Z (другое обозначение - ось Up) - ось, направленная вертикально вверх.
Ориентация трехгранника XYZ, из-за вращения Земли и движения ТС постоянно смещается с угловыми скоростями.
Основным недостатком в практическом применении ГСК в навигации является большие величины угловой скорости этой системы в высоких широтах, возрастающие вплоть до бесконечности на полюсе. Поэтому вместо ГСК используется полусвободная в азимуте СК.
Полусвободная в азимуте система координат
Полусвободная в азимуте СК отличается от ГСК только одним уравнением, которое имеет вид:
Соответственно, система имеет тоже начальное положение, что ГСК и их ориентация также совпадает с одной лишь разницей, что ее оси Xω и Yω отклонены от соответствующих осей ГСК на угол ε для которого справедливо уравнение
Преобразование между ГСК и полусвободной в азимуте СК осуществляется по формуле[2]


В реальности все расчеты ведутся именно в этой системе, а потом для выдачи выходной информации происходит преобразование координат в ГСК.
Форматы записи географических координат
Для записи географических координат используется система WGS84.
Координаты (широта от -90° до +90°, долгота от -180° до +180°) могут записываться:
- в° градусах в виде десятичной дроби (современный вариант),
- в° градусах и ′ минутах с десятичной дробью,
- в° градусах, ′ минутах и ″ секундах с десятичной дробью (исторически сложившаяся форма записи).
В англоязычных странах в качестве десятичного разделителя используется точка, в большинстве остальных, как и стандарт десятичного разделителя в России - запятая. Правда, в некоторых русскоязычных научных издательствах все же предпочитают использовать англоязычный формат десятичного разделителя.
Положительные знаки координат представляются (в большинстве случаев опускаемым) знаком «+», либо буквами: «N» - северная широта и «Е» - восточная долгота.
Отрицательные знаки координат представляются либо знаком «-», либо буквами: «S» - южная широта и «W» - западная долгота. Буквы могут стоять как впереди, так и сзади.
Единых правил записи координат не существует.
На картах поисковых систем по умолчанию показываются координаты в градусах с десятичной дробью со знаками «-» для отрицательной долготы. На картах Google и картах Яндекс вначале широта, затем долгота (до октября 2012 на картах Яндекс был принят обратный порядок: сначала долгота, потом широта). Эти координаты видны, например, при прокладке маршрутов от произвольных точек. При поиске распознаются и другие форматы.
В навигаторах по умолчанию чаще показываются градусы и минуты с десятичной дробью с буквенным обозначением, например в Navitel, в iGO. Вводить координаты можно и в соответствии с другими форматами. Формат «градусы и минуты» рекомендуется также при радиообмене в морском деле. В то же время часто используется и исконный способ записи с градусами, минутами и секундами. В настоящее время координаты могут записываться одним из множества способов или дублироваться двумя основными (с градусами и с градусами, минутами и секундами). Как пример, варианты записи координат знака «Нулевой километр автодорог Российской Федерации»
55°45′21″ с.ш. 37°37′04″ в. д.(G) (O) (Я):
- 55.75972°, 37.61777° - градусы
- N55.759722°, Е37.617777° - градусы ( + доп.буквы)
- 55°45.35′N, 37°37.06′Е - градусы и минуты ( + доп.буквы)
- 55°45′20.9916″N, 37°37′3.6228″Е - градусы, минуты и секунды ( + доп. буквы)
При необходимости форматы можно пересчитать самостоятельно: 1°=60′ минутам, 1′ минута = 60″ секундам. Также можно использовать специализированные сервисы.
Известна система тревожной сигнализации по патенту РФ №2053563, МПК 6 G08D 13/26, содержащая чувствительный элемент, подключенный к управляющему входу генератора и последовательно соединенные детектор, пороговый блок и блок сигнализации. Кроме того, в систему введен блок задержки, причем выход генератора подключен к входу детектора и входу блока задержки, выход которого соединен с входом детектора.
Недостаток этой системы - ее узкоспециализированное функциональное назначение, в частности, она не имеет датчиков контроля возникновения пожара.
Известна система для тревожной сигнализации по патенту РФ на изобретение №2090934, МПК 6 G08D 13/00, содержащая датчик, логический блок, формирователь импульсов и формирователь тревожного сигнала.
Недостатки также - узкоспециализированное назначение системы, низкая надежность и сложность в обслуживании и отсутствие привязки к системе координат.
Известна интегрированная интеллектуальная система безопасности по патенту РФ на изобретение №2103444, МПК 6 G08D 26/00, заявл. 06.10.1994 г. Эта система содержит рабочее место оператора, контроллер, модуль охранной сигнализации и модуль пожарной сигнализации.
Недостатки те же самые.
Известны способ и система управления видеоизображением по патенту РФ 2274876, МПК G01C 13/06, опубл. 20.04.2006 г.
Сущность изобретения заключается в том, что после фиксации координат места наблюдения с этого места производят серию снимков панорамы местности и вводят их в память блока поля кадров, затем с помощью коррелятора производят объединение снимков в единую эталонную панораму наблюдаемой местности, причем по заранее известным параметрам оптической системы на полученной панораме фиксируют относительные угловые координаты в виде точек изображения, затем определяют истинное угловое положение панорамы, после этого наблюдатель совмещает линию визирования с тем или иным наблюдаемым объектом и производит запись соответствующего кадра, кадр поступает в коррелятор, который находит место положения аналогичного снимка на эталонной панораме, а устройство управления и вычислений фиксирует истинные углы на объект наблюдения, в процессе наблюдения осуществляют также стабилизацию оптической оси визирования за счет развязки ее с корпусом оптического прибора наблюдателя. Предложенное устройство содержит оптическую систему наблюдения, связанную с устройством для фиксации оптического изображения в цифровом виде. В устройство для определения координат объекта на местности введен прибор определения собственных координат наблюдателя, соединенный своим выходом с входом устройства управления и вычислений, устройство фиксации оптического изображения в цифровом виде соединено своим выходом с входом блока памяти одного кадра, соединенного своими выходом-входом соответственно с входом-выходом коррелятора, который связан своими выходом-входом соответственно с входом-выходом блока памяти поля кадров и своим выходом-входом соответственно с входом-выходом устройства управления и вычислений, блок памяти поля кадров также соединен своим выходом с входом устройства управления и вычислений, выполняющего функции определения угловых координат, причем все указанные приборы, устройства и блоки размещены на корпусе оптической системы наблюдения.
Недостаток - невозможность получения информации с охраняемой местности в прошедшем времени.
Известны способ и система управления изображением по заданным координатам по патенту РФ на изобретение №2162591, МПК G01B 11/24, опубл. 27.01.2001 г., прототип способа и устройства.
Этот способ заключается в том, что на контролируемых участках поверхности тела сложной формы размещают метки, пропорциональные размерам этой поверхности. В качестве меток используют плоские элементы одинаковой формы и размеров. Восприятие изображения поверхности тела сложной формы осуществляют оптическим фиксирующим прибором, например видеокамерой. Сравнивая изображения метки и эталонной метки, расположенной таким образом, что координаты всех точек метки известны, судят о координатах точек поверхности тела сложной формы, а также об ориентации участка поверхности, на котором расположена метка, учитывая угол его наклона. Технический результат: повышение эффективности определения координат точек и ориентации участков поверхности тела сложной формы путем упрощения анализа результатов измерений воспринимаемого изображения этой поверхности.
Недостатки - очень большой объем подготовительных работ и невозможность получения информации об охраняемых объектах в прошедшем времени.
Задача создания изобретения - обеспечение максимальной автоматизации процесса управления видеоизображением и получение качественного видеоизображения в любое время в любой точке.
Достигнутый технический результат - обеспечение получения видеоизображения в любое время в любой точке в формате 2Д или 3Д.
Решение указанных задач достигнуто в способе управления видеоизображением по координатам местности, включающем определение географических координат видеокамер и реперных точек в пределах сектора обзора видеокамеры, внесение изображения местности в базу данных компьютера и вывод изображения на экран монитора, тем, что на секторы обзора каждой видеокамеры накладывают координатную сетку с заранее заданным интервалом между ее линиями для формирования элементарных ячеек и определяют методом интерполирования координаты всех элементарных ячеек в местной системе координат, переводят в географическую систему координат, вносят в базу данных одновременно изображения местности в пределах элементарной ячейки, ее географические координаты и время фиксации видеоизображения и при необходимости вводят в компьютер время и координаты интересующей элементарной ячейки и по запросу оператора выводят из памяти компьютера на монитор изображение на этой элементарной ячейке и соседних ячейках с указанного момента времени в динамике. Дополнительно в базу данных можно вводить третью географическую координату элементарной ячейки - высоту над уровнем моря. Видеоизображение интересующей элементарной ячейки можно выводить в ускоренном режиме. Видеоизображение интересующей элементарной ячейки можно выводить в режиме он-лайн.
Решение указанных задач достигнуто в устройстве для управления видеоизображением по координатам местности, содержащем компьютер с присоединенными к нему монитором, клавиатурой, манипулятором типа «мышь» и по меньшей мере одной видеокамерой, тем, что компьютер выполнен с возможностью внесения в базу данных одновременно изображения местности в пределах элементарной ячейки, ее координаты и время фиксации видеоизображения, и при необходимости вводят в компьютер время и координаты интересующей элементарной ячейки и выводят из памяти компьютера на монитор изображение на этой элементарной ячейке и соседних элементарных ячеек с указанного момента времени в динамике. Компьютер выполнен с возможностью внесения в базу данных третьей географической координаты элементарной ячейки - высоты над уровнем моря. Компьютер выполнен с возможностью демонстрации изображения в ускоренном режиме. Компьютер выполнен с возможностью демонстрации изображения в режиме он-лайн. По меньшей мере, одна видеокамера выполнена с возможностью поворота, а компьютер - с возможностью управления поворотом по заданным координатам. По меньшей мере, одна видеокамера выполнена с возможностью поворота, а компьютер - с возможностью ее поворота по заданным координатам.
Поворотная видеокамера может быть выполнена с датчиками углового положения ее оптической оси в виде датчиков поворота видеокамеры в горизонтальном и, вертикальном направлениях.
Сущность изобретений поясняется на чертежах (фиг. 1…10), где:
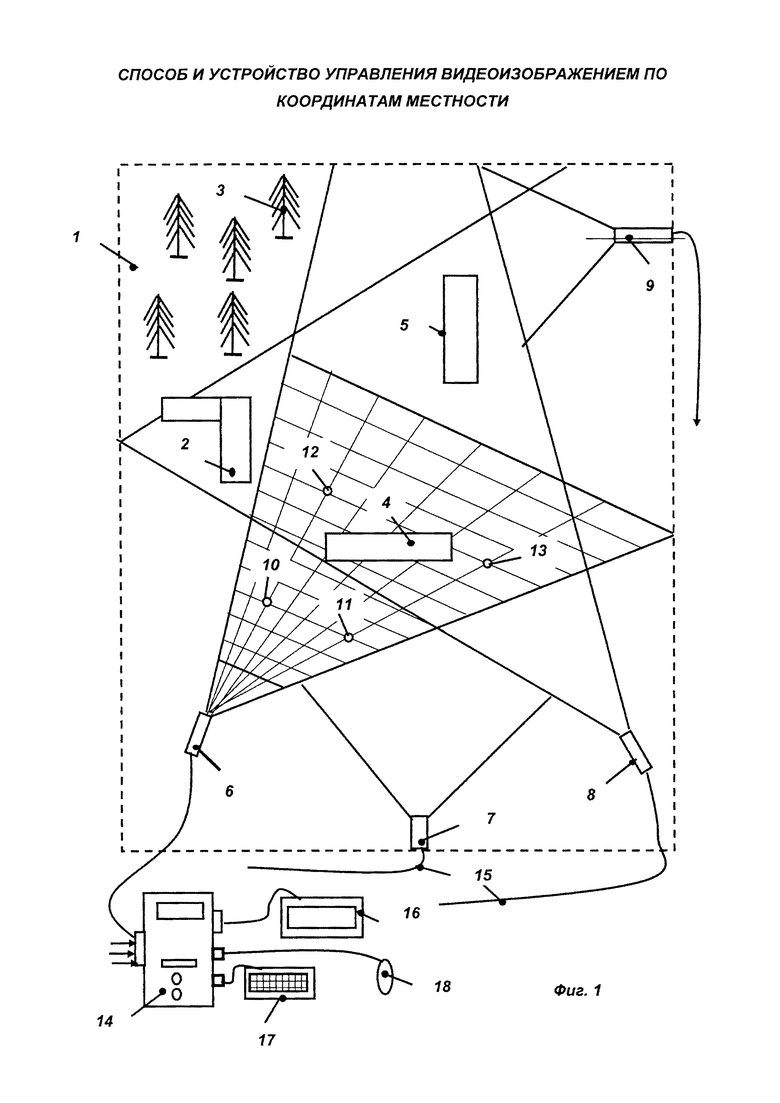
- на фиг. 1 приведена схема охраны объекта с применением нескольких видеокамер,
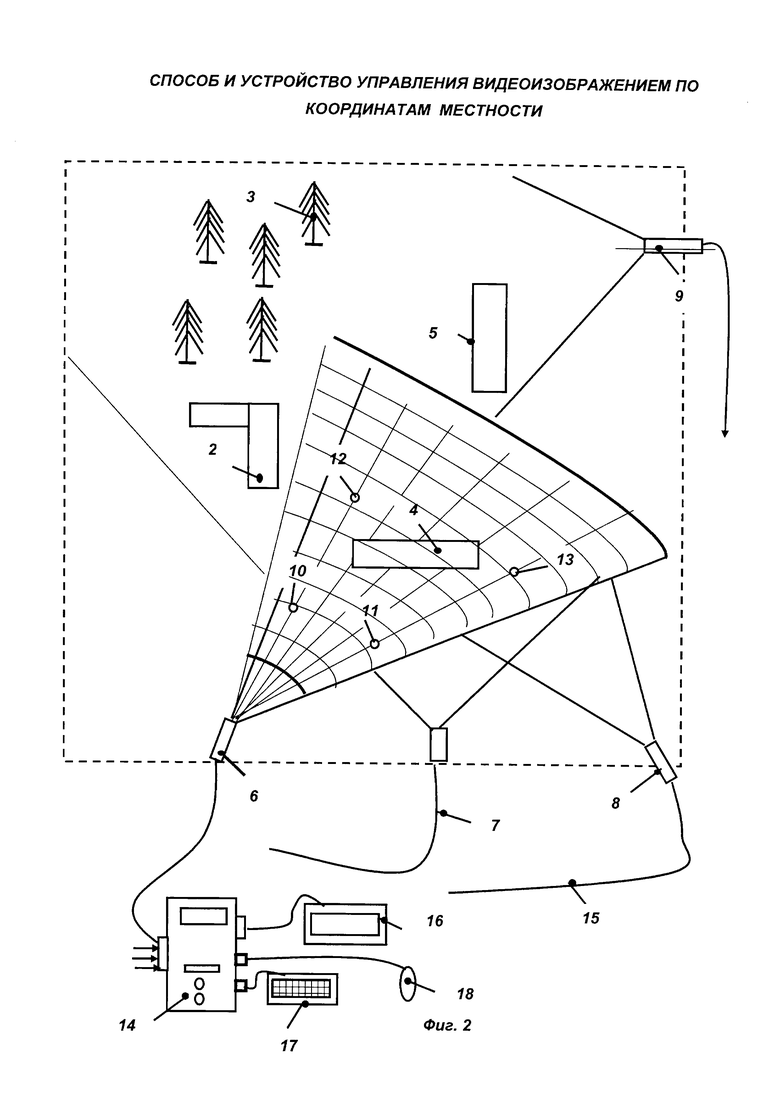
- на фиг. 2 приведена схема определения местных координат в системе полярных координат,
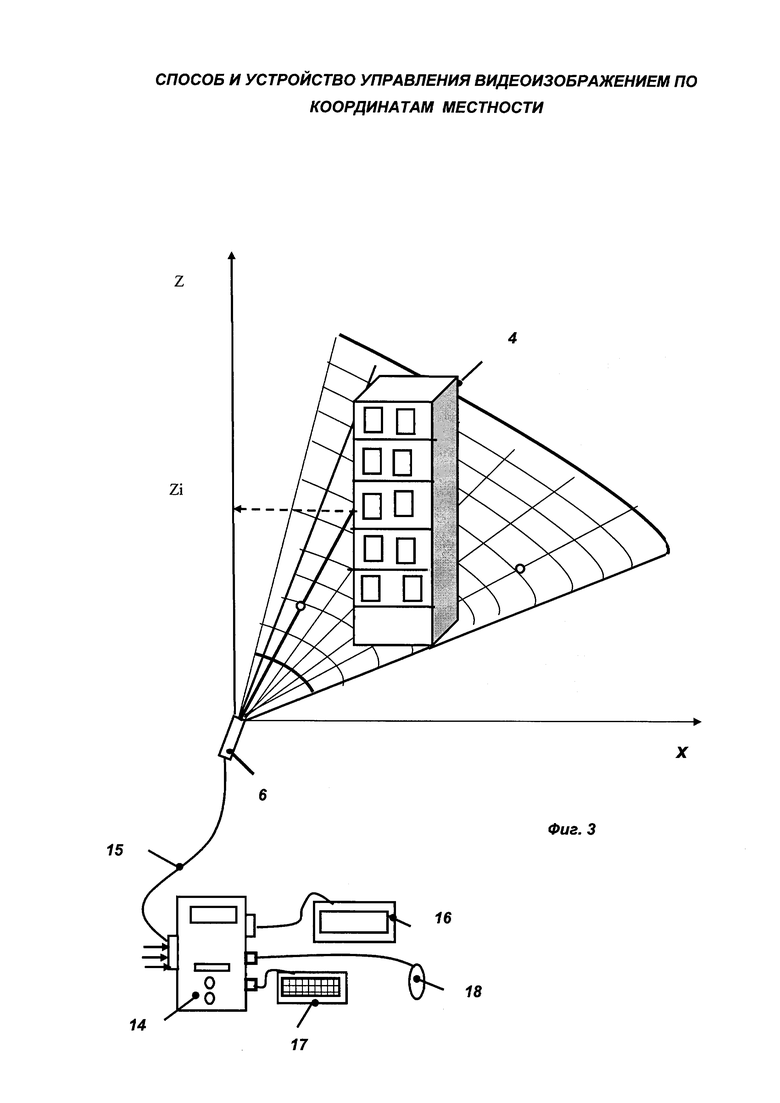
- на фиг. 3 приведена схема определения третьей координаты,
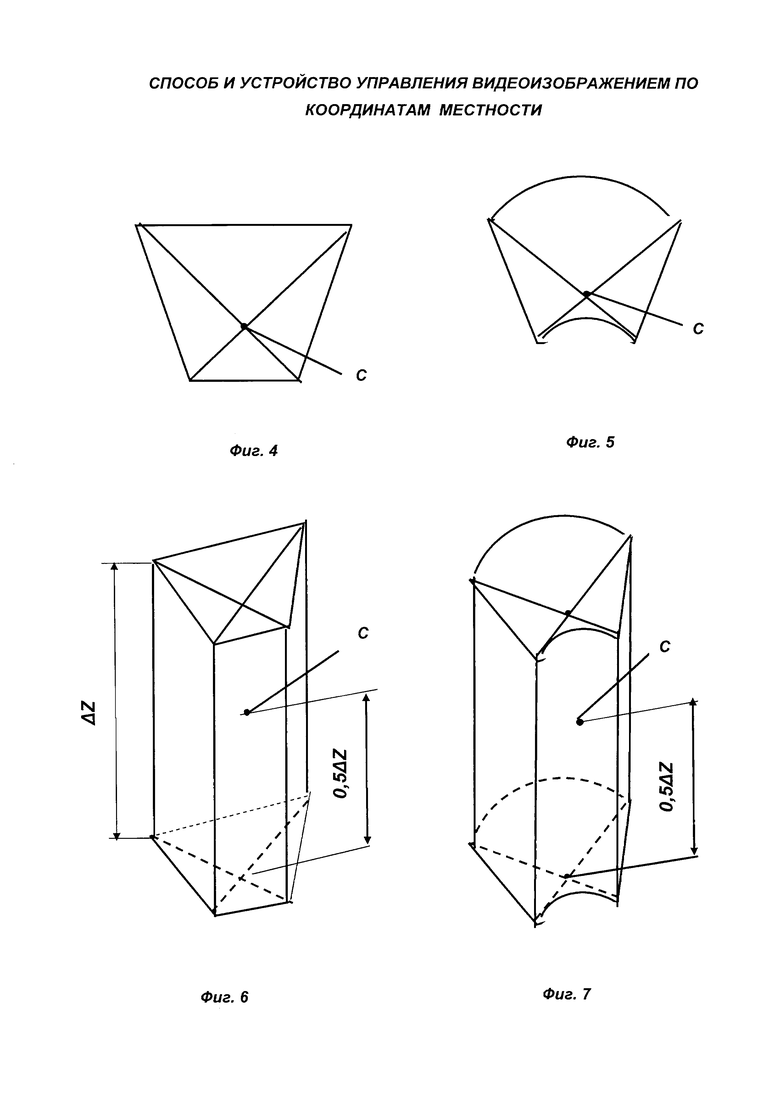
- на фиг. 4 приведена элементарная ячейка в формате 2Д,
- на фиг. 5 приведен второй вариант элементарной ячейки в формате 2Д,
- на фиг. 6 приведена элементарная ячейка в формате 3Д,
- на фиг. 7 приведен второй вариант элементарной ячейки в формате 3Д,
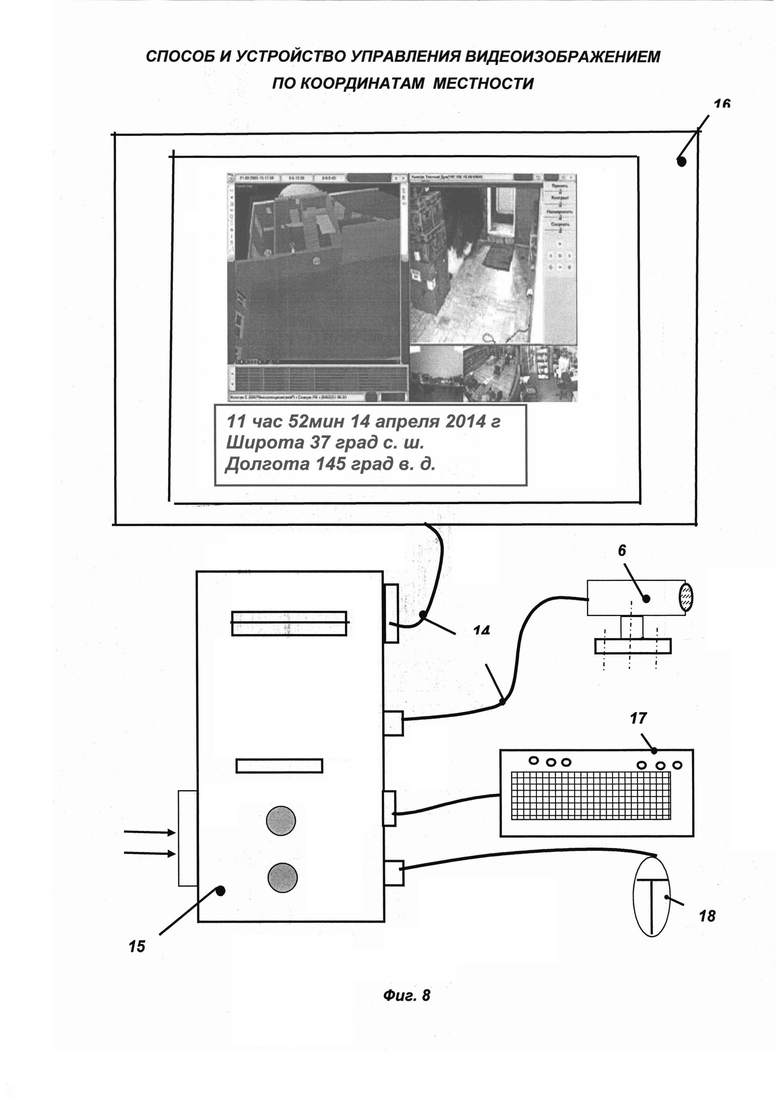
- на фиг. 8 приведена схема вывода видеоизображения по команде оператора,
- на фиг. 9 приведен алгоритм работы устройства,
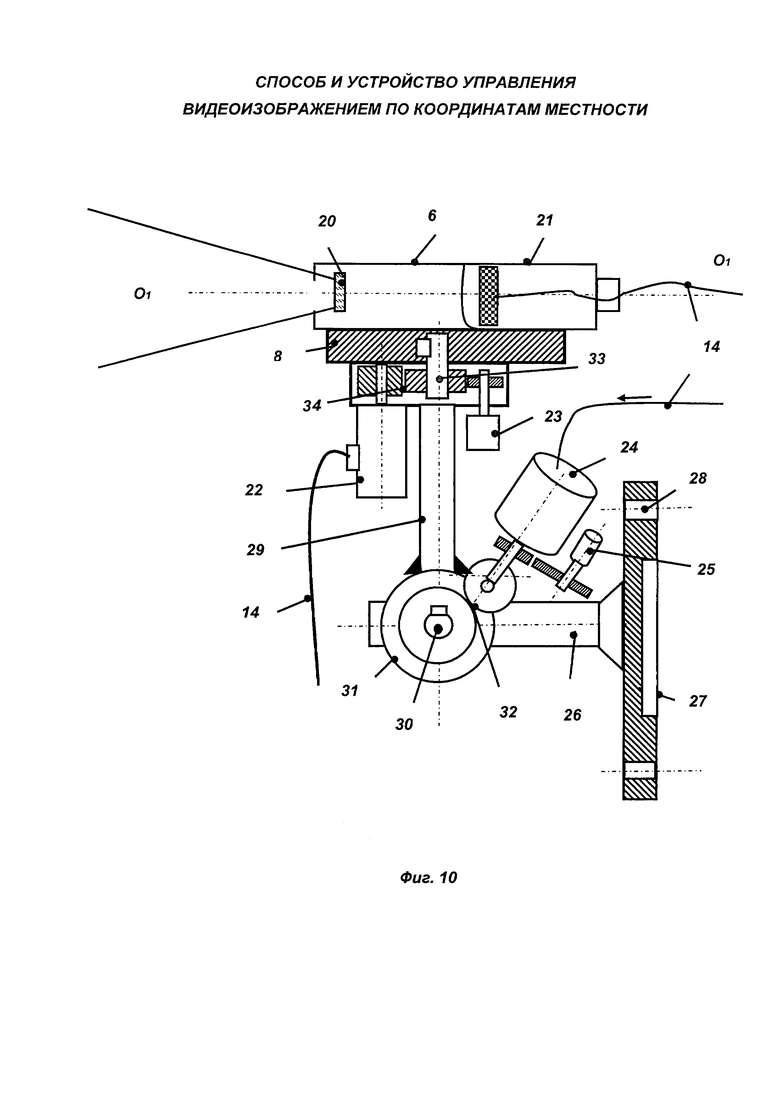
- на фиг. 10 приведена конструкция поворотной видеокамеры.
Устройство для управления видеоизображением по координатам местности 1 (фиг. 1 … 10) предназначено для контроля за безопасностью всей местности 1 и находящихся на ней объектов 2 … 5 при помощи видеокамер 6 … 9.
Для работы с координатами всей местности 1, во-первых, выполняют определение координат видеокамер 2 … 5 (фиг. 1). Потом определяют координаты как минимум трех точек, не лежащих на одной прямой. В нашем примере выбрано четыре реперные точки 10 … 13.
Кроме того, в состав устройства входят соединенные между собой при помощи каналов связи 14 компьютер 15, монитор 16, клавиатура 17 и манипулятор типа «мышь» 18.
Сектора обзора всех видеокамер разбиваются на элементарные ячейки (фиг. 1, 2, 4 и 5). При необходимости выполнения видеонаблюдения в формате 3Д осуществляется послойная разбивка на объемные элементарные ячейки (фиг. 3, 6 и 7).
На фиг. 8 показана практическая реализация способа на экране монитора 16, а на фиг. 9 - алгоритм реализации способа.
Возможно применение в устройстве, по меньшей мере, одноповоротной видеокамеры. Одна видеокамера, например 6, может быть выполнена поворотной (фиг. 10). Поворотная видеокамера 6 установлена на платформе 19 и имеет объектив 20 и корпус 21, Кроме того, видеокамера 6 имеет привод горизонтального поворота 22 и кинематически связанный с ним датчик горизонтального поворота 23 и привод вертикального поворота 24 и связанный с ним датчик вертикального поворота 25. Кроме того, он имеет кронштейн 26 и жестко соединенную с ним платформу 27 с четырьмя крепежными отверстиями 28. Над видеокамерой 6 может быть выполнен защитный кожух (не показано). С основанием 19 не жестко соединен стержень 29.
Видеокамера 6 содержит стержень 29, через который проходит вал 30, на котором установлена ведомая шестерня 31 редуктора 32. С редуктором 32 кинематически связан привод вертикального поворота 24 и датчик вертикального поворота 25. Платформа 18 имеет вал 33 с которым через редуктор 34 связаны привод горизонтального поворота 22 и датчик горизонтального поворота 23.
Устройство работает следующим образом (фиг. 1 … 10). Подается электроэнергия на компьютер 15 и видеокамеры 5 .. 9. В компьютер 14 вводится программное обеспечение и исходные данные, в том числе координаты реперных точек 10 … 13 местности 1.
Видеоизображение со всех видеокамер 6 … 9 разбивается на элементарные ячейки (фиг. 4 … 7), определяются координаты центра С каждой элементарной ячейки местной системе координат, а потом их пересчитывают в географическую систему координат.
Эти данные вносится в базу данных компьютера 15 (на жесткий диск) с привязкой каждого кадра ко времени его выполнения.
При необходимости оператор при помощи клавиатуры 17 или манипулятора типа «мышь» 18 вводит исходные данные для поиска нужного изображения: время и географические координаты: широта и долгота. При необходимости вводится высота над уровнем моры. (фиг. 8). После этого из базы данных извлекается нужный кадр, потом конкретная элементарная ячейка и соседние ячейки. Их изображение увеличивается и воспроизводится в виде видеофильма в реальном темпе течения времени на экране монитора 16. При необходимости возможен просмотр в ускоренном темпе или в режиме он-лайн.
Если используется поворотная камера, то компьютер 15 производит расчет координат интересующего оператора объект, вычисляет углы взаимного расположения видеокамеры 6 и интересующего оператора объекта и подает команду на приводы 22 и 24 (фиг. 10) для установки оптической оси O1O1 видеокамеры 6 по направлению на интересующий оператора объект. Обратная связь видеокамеры 6 с заданными угловыми параметрами осуществляется при помощи датчиков углового положения 23 и 25.
Если искомая точка была определена несколькими видеокамерами 6 … 9, то на экран монитора 16 выводится два или более изображений одного и того же места в разных ракурсах. Возможен вывод этих изображений одновременно на несколько мониторов.
В ЗАО «Интегра-С» разработано программное обеспечения для реализации предложенного способа и ведется отладка аппаратно-программного комплекса.
Применение группы изобретений позволило:
1. Воспроизвести события в заданной точке в заданное время по команде оператора.
2. Определять третью координату искомого объекта.
3. Работать в ускоренном режиме.
4. Работать в режиме он-лайн.
5. Следить за объектом (в том числе движущимся) в реальном времени посредством поворотной камеры.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕОИНФОРМАЦИОННАЯ СИСТЕМА В ФОРМАТЕ 4D | 2017 |
|
RU2667793C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| Способ определения координат объектов и их распознавания | 2022 |
|
RU2787946C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ВИДЕОИЗОБРАЖЕНИЯ | 2016 |
|
RU2625097C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЕДЕНИЕМ СНАЙПЕРСКОГО ОГНЯ | 2011 |
|
RU2474782C1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ, ПОСТРОЕННАЯ НА ПРИНЦИПЕ РАЗНОСЕНСОРНОГО ПАНОРАМНОГО ОБЗОРА МЕСТНОСТИ С ФУНКЦИЕЙ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ОЧАГА ВОЗГОРАНИЯ | 2011 |
|
RU2486594C2 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| Автоматизированная система сбора и распространения цифровой картографической информации водных путей | 2024 |
|
RU2833209C1 |

Изобретение относится к охранной технике. Техническим результатом является обеспечение визуализации изображения по заданным координатам и времени. Способ включает определение координат видеокамер и реперных точек в пределах сектора обзора видеокамеры и внесение изображения местности в базу данных компьютера и вывод изображения на экран монитора, на секторы обзора каждой видеокамеры накладывают координатную сетку с заранее заданным интервалом между ее линиями для формирования элементарных ячеек и определяют методом интерполирования или экстраполирования координаты всех узлов сетки, вносят в базу данных одновременно изображения местности в пределах элементарной ячейки, ее географические координаты и время фиксации видеоизображения и при необходимости вводят в компьютер время и координаты интересующей элементарной ячейки и выводят из памяти компьютера на монитор изображение на этой элементарной ячейке и соседних ячейках с указанного момента времени в динамике, при этом в базу данных вводят третью географическую координату элементарной ячейки - высоту над уровнем моря, а видеоизображение интересующей элементарной ячейки выводят в режиме он-лайн. 2 н. и 3 з.п. ф-лы, 10 ил.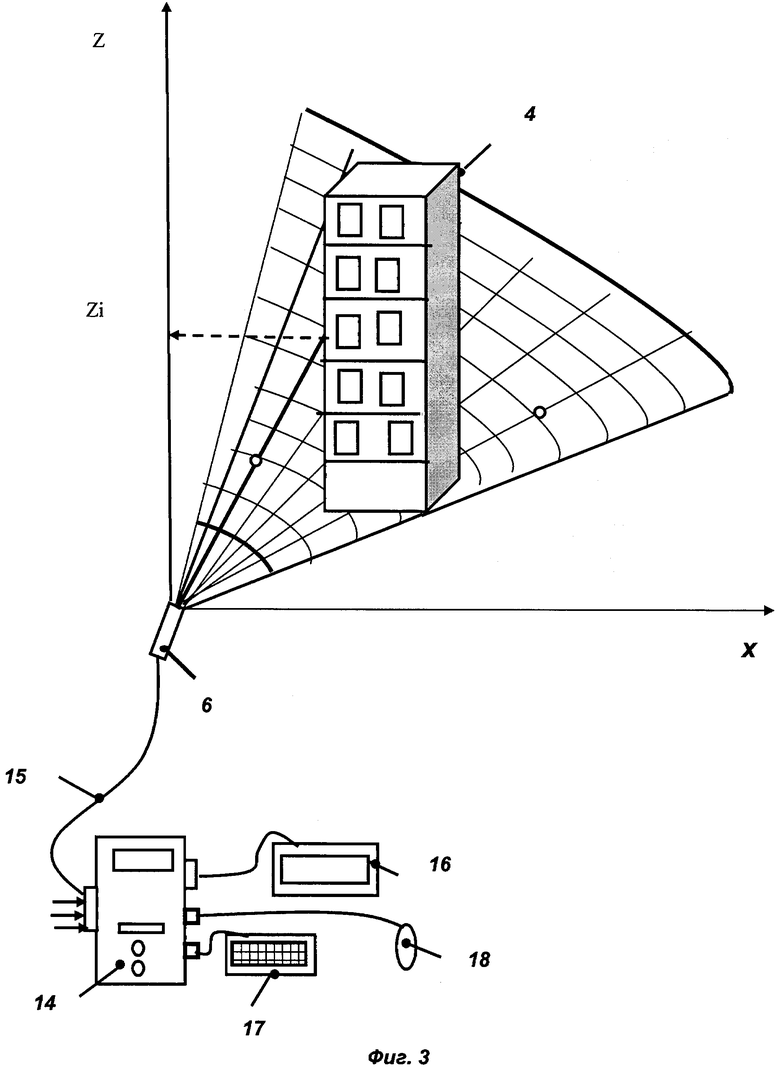
1. Способ управления видеоизображением по координатам местности, включающий определение координат видеокамер и реперных точек в пределах сектора обзора видеокамеры и внесение изображения местности в базу данных компьютера и вывод изображения на экран монитора, отличающийся тем, что на секторы обзора каждой видеокамеры накладывают координатную сетку с заранее заданным интервалом между ее линиями для формирования элементарных ячеек и определяют методом интерполирования или экстраполирования координаты всех узлов сетки, вносят в базу данных одновременно изображения местности в пределах элементарной ячейки, ее географические координаты и время фиксации видеоизображения и при необходимости вводят в компьютер время и координаты интересующей элементарной ячейки и выводят из памяти компьютера на монитор изображение на этой элементарной ячейке и соседних ячейках с указанного момента времени в динамике, при этом в базу данных вводят третью географическую координату элементарной ячейки - высоту над уровнем моря, а видеоизображение интересующей элементарной ячейки выводят в режиме он-лайн.
2. Устройство для управления видеоизображением по координатам местности, содержащее компьютер с присоединенными к нему монитором, клавиатурой, манипулятором типа «мышь» и по меньшей мере одной видеокамерой, отличающееся тем, что компьютер выполнен с возможностью внесения в базу данных одновременно изображения местности в пределах элементарной ячейки, ее координаты и время фиксации видеоизображения и при необходимости вводят в компьютер время и координаты интересующей элементарной ячейки и выводят из памяти компьютера на монитор изображение на этой элементарной ячейке и соседних ячейках с указанного момента времени в динамике, при этом компьютер выполнен с возможностью внесения в базу данных третьей географической координаты элементарной ячейки - высоты над уровнем моря.
3. Устройство для управления видеоизображением по координатам местности по п. 2, отличающееся тем, что компьютер выполнен с возможностью демонстрации изображения в режиме он-лайн.
4. Устройство для управления видеоизображением по координатам местности по п. 2, отличающееся тем, что по меньшей мере одна видеокамера выполнена с возможностью поворота, а компьютер - с возможностью управления поворотом по заданным координатам.
5. Устройство для управления видеоизображением по координатам местности по п. 4, отличающееся тем, что по меньшей мере одна видеокамера выполнена с возможностью поворота, а компьютер - с возможностью ее поворота по заданным координатам.
| US20090225164 A1, 10.09.2009 | |||
| СИСТЕМА И СПОСОБ ВИДЕОМОНИТОРИНГА ЛЕСА | 2011 |
|
RU2458407C1 |
| ИНФОРМАЦИОННО-ОХРАННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2244641C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК И ОРИЕНТАЦИИ УЧАСТКОВ ПОВЕРХНОСТИ ТЕЛА СЛОЖНОЙ ФОРМЫ | 1999 |
|
RU2162591C1 |

