Изобретение относится к области машиностроения, в частности к захватным устройствам, и может быть использовано для обезвреживания мин.
Прототипом является захват манипулятора, содержащий силовой цилиндр, установленный на корпусе, на котором шарнирно установлены двуплечие захватные рычаги с приводом, выполненным в виде надувной эластичной камеры, закрепленной на штоке силового цилиндра и расположенной между захватными рычагами, причем полость камеры соединена с источником сжатого воздуха, при этом полость надувной камеры соединена с полостями цилиндра посредством соответствующих клапанов [А.с. СССР 1689061, МПК B25J 15/00, B25J 15/02, 1991].
Недостатками прототипа являются:
- неудобство в эксплуатации, вызванное тем, что захват может брать детали только определенной формы и размера;
- сложность конструкции, обусловленная наличием большого числа деталей.
Задачей изобретения является устранение этих недостатков, а именно упрощение конструкции и повышение эксплуатационных характеристик.
Задача решается тем, что в способе работы захвата манипулятора, включающем погружение в полость захватываемого предмета части захвата, создание последним распорной силы и удерживание посредством ее захватываемого элемента, захват выполняют в виде анкера, при этом распорную силу создают путем относительного перемещения внутреннего и наружного элементов анкера.
Полость в захватываемом предмете создают внутренним элементом анкера. Захват выполняют с возможностью его отделения от манипулятора с помощью дистанционного управления. Внутреннюю часть анкера выполняют в виде сверла.
В устройстве для осуществления способа работы захвата манипулятора, содержащем закрепленный на манипуляторе силовой цилиндр со штоком, взаимодействующим через нажимной объект с захватом, нажимной объект выполнен в виде вилки, а захват - в виде анкера, внутренний элемент которого имеет проточку, взаимодействующую с вилкой.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Выполнение захвата в виде анкера и создание распорной силы путем относительного перемещения внутреннего и наружного элементов анкера позволяют захватывать предметы, по существу, любой формы, в которых посредством анкера можно выполнить отверстие (прокол), например ткань, пластик картон и т.п. Это улучшает эксплуатационные характеристики и упрощает конструкцию.
Создание полости в захватываемом предмете внутренним элементом анкера упрощает конструкцию за счет сокращения числа деталей, например, выполняя внутренний элемент анкера в виде сверла.
Выполнение захвата с возможностью его отделения от манипулятора с помощью дистанционного управления позволяет сохранить дорогостоящую часть (роботизированный комплекс) при подрыве мины в безопасном месте, если последняя по каким-либо причинам не отделяется от захвата. Это повышает эксплуатационные характеристики.
Выполнение внутренней части анкера в виде сверла упрощает конструкцию захвата, позволяя сравнительно легко получать отверстие (полость) в захватываемых предметах.
Выполнение в устройстве для осуществления способа работы захвата манипулятора нажимного объекта в виде вилки, а захвата - в виде анкера, внутренний элемент которого имеет проточку, взаимодействующую с вилкой, позволяет упростить конструкцию захвата и сделать его, по существу, универсальным.
Изобретение поясняется чертежами.
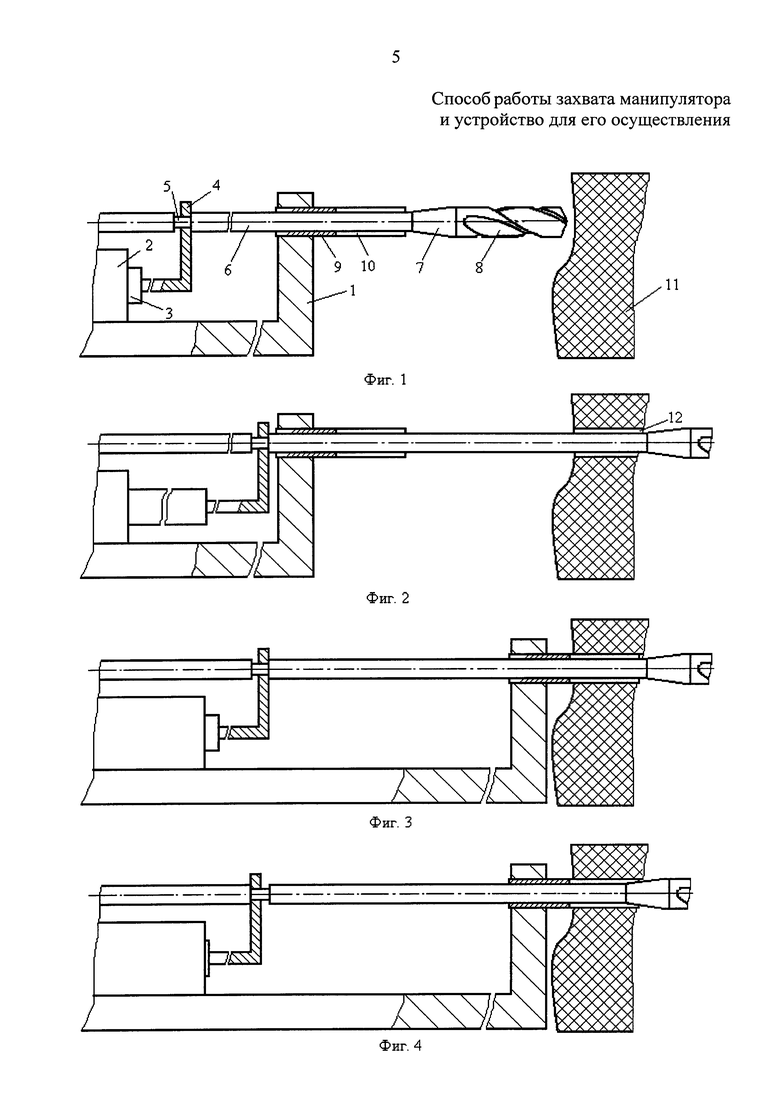
На фиг. 1 изображен захват манипулятора. На фиг. 2 изображен захват в момент сверления отверстия в предмете. На фиг. 3 изображен захват в момент подготовки к сцеплению с предметом. На фиг. 4 изображен захват в момент сцепления.
Захват манипулятора содержит корпус 1, на котором закреплен силовой цилиндр 2 со штоком 3, взаимодействующим с вилкой 4, размещенной в проточке 5 хвостовика 6, сопряженного конусом 7 с рабочей частью 8 сверла. Хвостовик установлен с возможностью вращения во втулке (трубке) 9, закрепленной в корпусе и имеющей на конце продольный паз 10, и связан, например посредством шлицевого соединения, с приводом, размещенным на корпусе. Посредством сверла в предмете 11 может быть выполнено отверстие 12.
Захват манипулятора работает следующим образом.
Для захвата предмета 11 произвольной формы приближают корпус 1 манипулятора со сверлом к поверхности предмета, при этом шток 3 силового цилиндра несколько выдвинут (фиг. 1). Затем посредством привода (не показан) приводят во вращение сверло и перемещают его вдоль продольной оси или посредством корпуса 1 манипулятора, или выдвижением штока силового цилиндра, как это показано на фиг. (2). Заметим, что для снижения трения вилки 4 о торец проточки 5 на хвостовик 6 сверла в этом месте может быть посажен радиально-упорный подшипник, через который будет осуществляться силовое воздействие вилки на сверло.
После того как в предмете 11 будет сделано отверстие 12, достаточное по глубине для помещения в него конца втулки 9, производят ввод указанного конца в отверстие посредством перемещения корпуса 1 и одновременного синхронного втягивания штока 3 в силовой цилиндр. В результате этого конец втулки 9 оказывается в отверстии 12, а сверло остается на прежнем месте (фиг. 3).
Далее втягивают шток 3, благодаря чему конус 7 сверла входит в конец втулки 9, расклинивая его (как цангу) и надежно сцепляя втулку с предметом 11 (фиг. 4). Теперь движением манипулятора (корпуса) предмет перемещают в нужное место.
Расцепление захвата с предметом производят путем выдвижения штока 3, при этом конус 7 выходит из втулки 9, ее конец за счет упругих свойств сжимается и захват освобождается. Если по какой-либо причине, например попадания мусора, конец втулки не возвращается в исходное положение, ослабляют крепление втулки в корпусе 1 и она вместе со сверлом выпадает из манипулятора, позволяя последний убрать из опасной зоны, например от места подрыва мины.
Внедрение изобретения позволит создать простой и удобный в эксплуатации захват для манипулятора, осуществляющий подъем предметов любой формы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ срезания деревьев | 1984 |
|
SU1308264A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| АГРЕГАТ ДЛЯ УДАЛЕНИЯ ИЗ ГРУНТА АНКЕРОВ И ФУНДАМЕНТОВ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2001 |
|
RU2280734C2 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Устройство для автоматической смены зажимных приспособлений | 1987 |
|
SU1510997A1 |
| УСТРОЙСТВО для РАСПРЕССОВКИ ДЕТАЛЕЙ ТИПА | 1973 |
|
SU383563A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ АНКЕРОВ И ФУНДАМЕНТОВ ЖЕЛЕЗОБЕТОННЫХ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2000 |
|
RU2193626C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ КОРПУСОВ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2014 |
|
RU2553277C1 |
Изобретение относится к области машиностроения, в частности к захватным устройствам, и может быть использовано для обезвреживания мин. Манипулятор для захвата предметов содержит корпус, на котором закреплен силовой цилиндр со штоком, и захват. Захват выполнен в виде анкера, состоящего из внутреннего элемента в виде сверла с рабочей частью и хвостовиком, сопряженными конусом, и наружного элемента в виде втулки с упругой концевой частью. При этом хвостовик сверла выполнен с проточкой, в которой размещен нажимной элемент в виде вилки, взаимодействующей со штоком силового цилиндра. Анкер выполнен с возможностью отделения от манипулятора. Для осуществления захвата предметов выполняют сверлом отверстие в захватываемом предмете, вводят в него концевую часть втулки и создают распорную силу, удерживающую захватываемый предмет, путем перемещения сверла относительно втулки с размещением конуса сверла в концевой части втулки. Изобретение направлено на упрощение конструкции и повышение эксплуатационных характеристик. 2 н. и 1 з.п. ф-лы, 4 ил.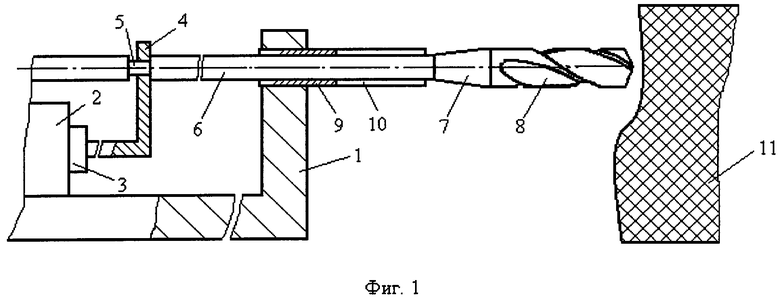
1. Манипулятор для захвата предметов, содержащий корпус, на котором закреплен силовой цилиндр со штоком, и захват, отличающийся тем, что захват выполнен в виде анкера, состоящего из внутреннего элемента в виде сверла с рабочей частью и хвостовиком, сопряженными конусом, и наружного элемента в виде втулки с упругой концевой частью, при этом хвостовик сверла выполнен с проточкой, в которой размещен нажимной элемент в виде вилки, взаимодействующей со штоком силового цилиндра.
2. Манипулятор по п. 1, отличающийся тем, что анкер выполнен с возможностью отделения от манипулятора.
3. Способ захвата предметов, включающий создание распорной силы, удерживающей захватываемый предмет, отличающийся тем, что используют манипулятор по п. 1 или 2, при этом выполняют сверлом отверстие в захватываемом предмете, вводят в него концевую часть втулки и создают упомянутую распорную силу путем перемещения сверла относительно втулки с размещением конуса сверла в концевой части втулки.
| ЕМКОСТНОЕ ДОЛГОВРЕМЕННОЕ ЗАПОМИНАЮЩЕЕУСТРОЙСТВО | 0 |
|
SU141015A1 |
| ЗАГЛУШКА ТРУБОПРОВОДОВ С МАНИПУЛЯТОРОМ | 2010 |
|
RU2442926C1 |
| Прибор для измерения расхода горючего | 1946 |
|
SU68769A1 |

