(54) МАНИПУЛЯТОР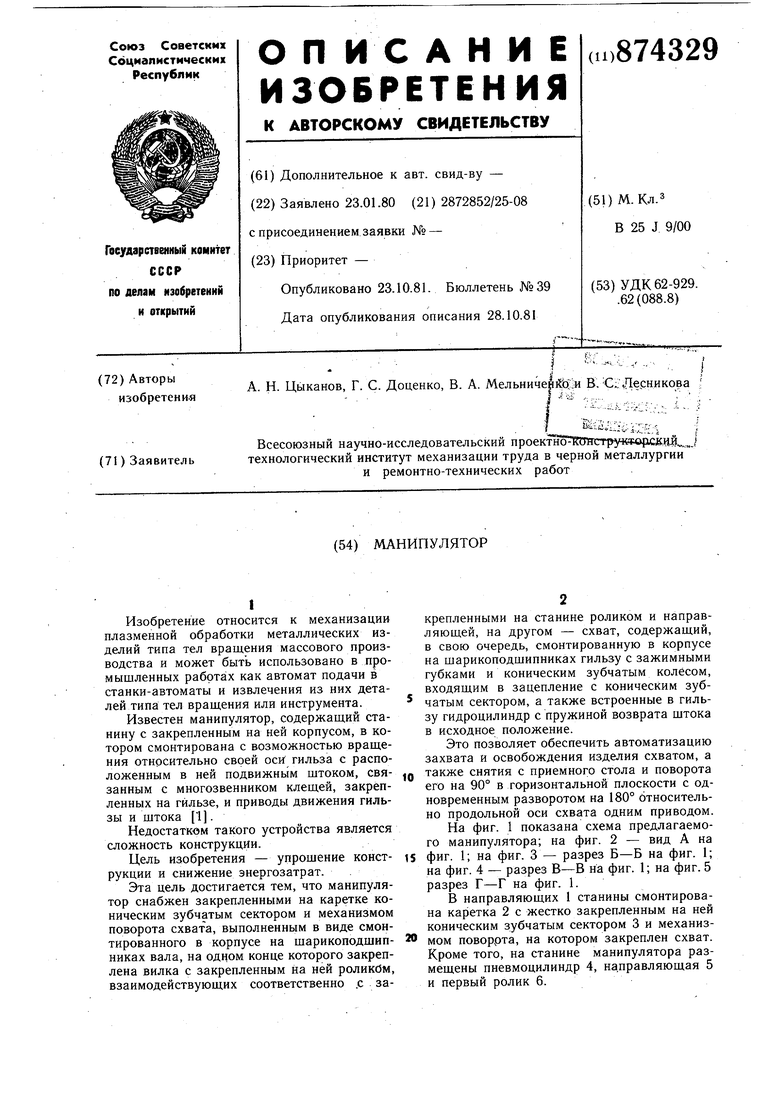
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для закалки цилиндрических изделий | 1987 |
|
SU1507812A1 |
| Ротационно-обжимное устройство | 1977 |
|
SU742024A1 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КОНЦОВ ТРУБ | 1971 |
|
SU411943A1 |
| Устройство для получения цилиндрических и конических деталей путем гибки с растяжением листового материала | 1983 |
|
SU1110512A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1984 |
|
SU1162534A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
1
Изобретение относится к механизации плазменной обработки металлических изделий типа тел вращения массового производства и может быть использовано в промышленных работах как автомат подачи в станки-автоматы и извлечения из них деталей типа тел вращения или инструмента.
Известен манипулятор, содержащий станину с закрепленным на ней корпусом, в котором смонтирована с возможностью вращения относительно своей оси гильза с расположенным в ней подвижным щтоком, связанным с многозвенником клещей, закрепленных на гильзе, и приводы движения гильзы и щтока 1.
Недостатком такого устройства является сложность конструкции.
Цель изобретения - упрощение конструкции и снижение энергозатрат.
Эта цель достигается тем, что манипулятор снабжен закрепленными на каретке коническим зубчатым сектором и механизмом поворота схвата, выполненным в виде смонтированного в корпусе на щарикоподшипниках вала, на одцом конце которого закреплена вилка с закрепленным на ней роликбм, взаимодействующих соответственно .с закрепленными на станине роликом и направляющей, на другом - схват, содержащий, в свою очередь, смонтированную в корпусе на щарикоподщипниках гильзу с зажимными губками и коническим зубчатым колесом, входящим в зацепление с коническим зубчатым сектором, а также встроенные в гильзу гидроцилиндр с пружиной возврата щтока в исходное положение.
Это позволяет обеспечить автоматизацию захвата и освобождения изделия схватом, а также снятия с приемного стола и поворота
10 его на 90° в горизонтальной плоскости с одновременным разворотом на 180° Относительно продольной оси схвата одним приводом.
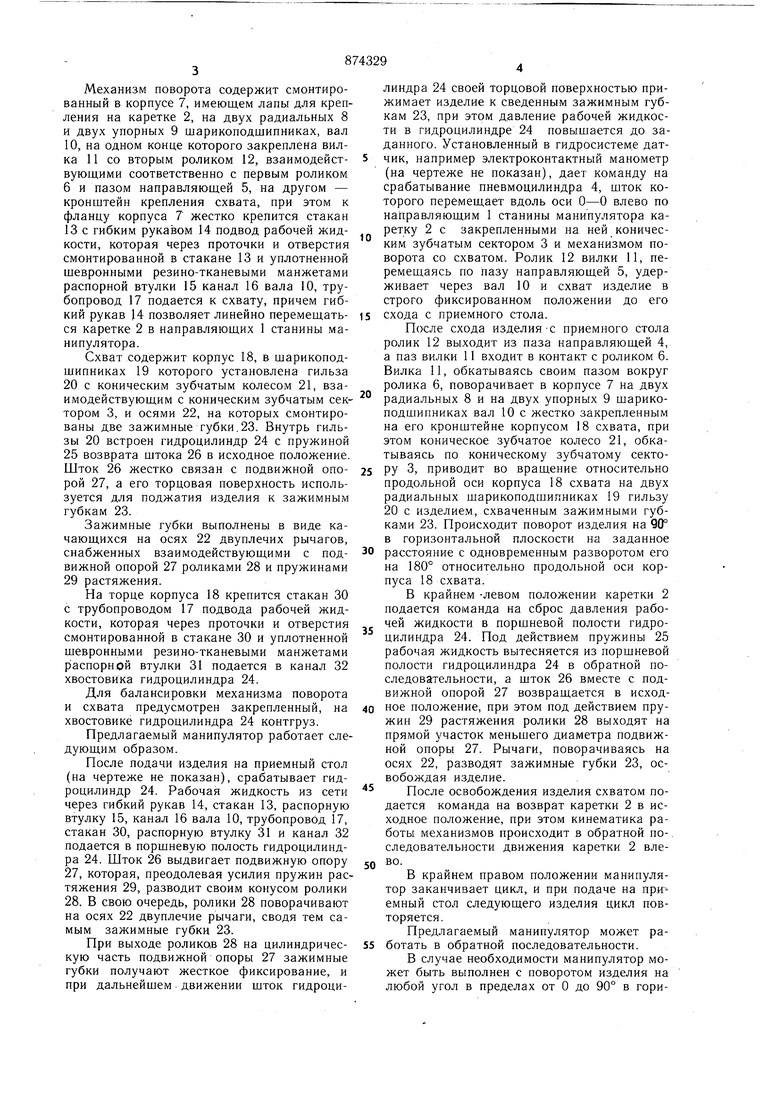
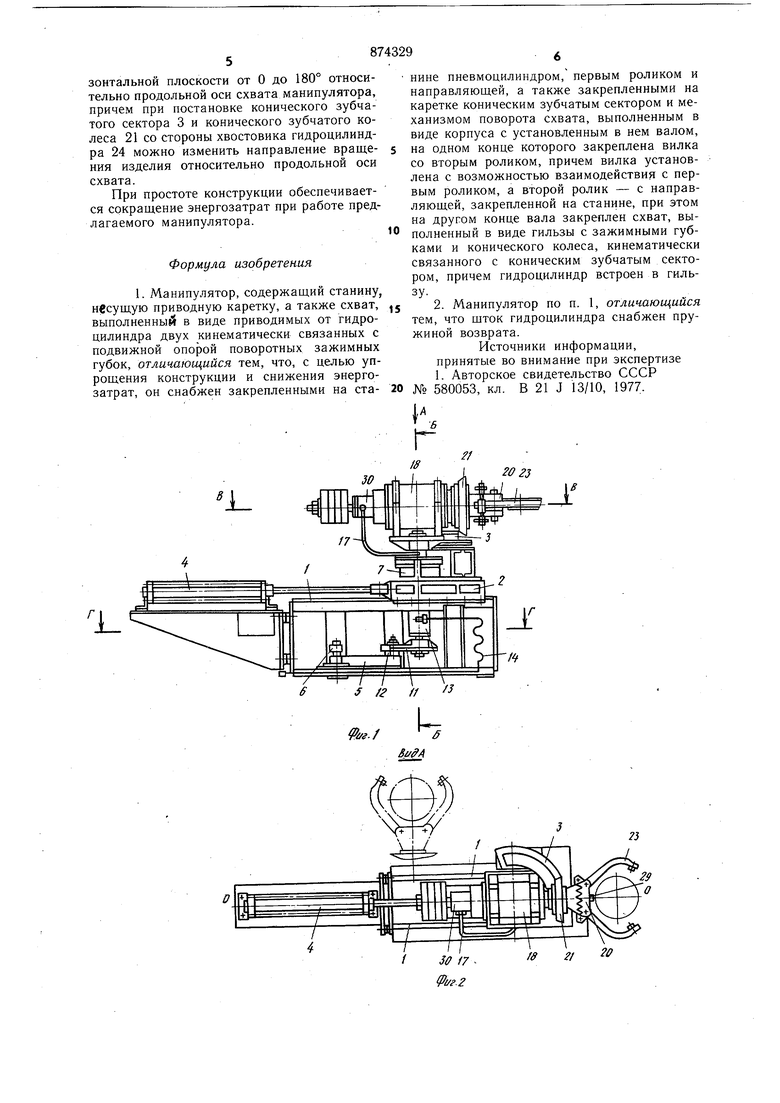
На фиг. 1 показана схема предлагаемого манипулятора; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1;
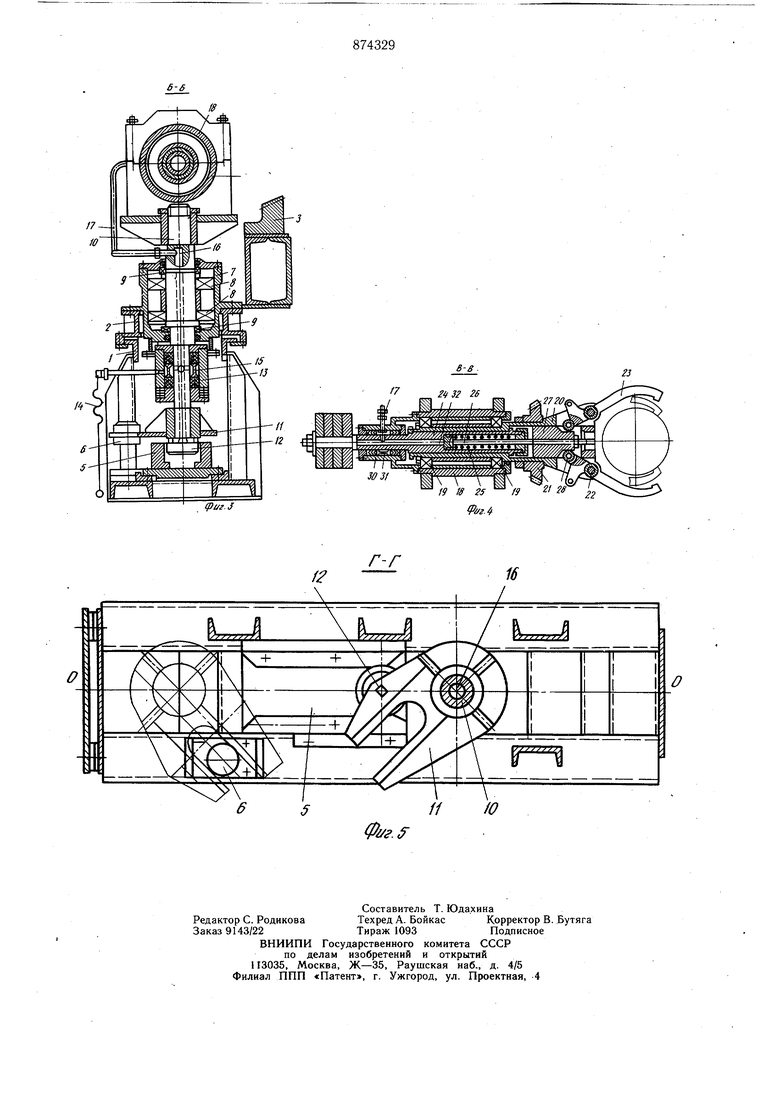
15 на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 разрез Г-Г на фиг. 1.
В направляющих 1 станины смонтирована каретка 2 с жестко закрепленным на ней коническим зубчатым сектором 3 и механиз20мом поворрта, на котором закреплен схват. Кроме того, на станине манипулятора размещены пневмоцилиндр 4, направляющая 5 и первый ролик 6.
Механизм поворота содержит смонтированный в корпусе 7, имеющем лапы для крепления на каретке 2, на двух радиальных 8 и двух упорных 9 шарикоподшипниках, вал 10, на одном конце которого закреплена вилка 11 со вторым роликом 12, взаимодействующими соответственно с первым роликом 6 и пазом направляюш,ей 5, на другом - кронштейн крепления схвата, при этом к фланцу корпуса 7 жестко крепится стакан 13 с гибким рукавом 14 подвод рабочей жидкости, которая через проточки и отверстия смонтированной в стакане 13 и уплотненной шевронными резино-тканевыми манжетами распорной втулки 15 канал 16 вала 10, трубопровод 17 подается к схвату, причем гибкий рукав 14 позволяет линейно перемешаться каретке 2 в направляюш,их 1 станины манипулятора.
Схват содержит корпус 18, в шарикоподшипниках 19 которого установлена гильза 20 с коническим зубчатым колесом 21, взаимодействующим с коническим зубчатым сектором 3, и осями 22, на которых смонтированы две зажимные губки.23. Внутрь гильзы 20 встроен гидроцилиндр 24 с пружиной 25 возврата штока 26 в исходное положение. Шток 26 жестко связан с подвижной опорой 27, а его торцовая поверхность используется для поджатия изделия к зажимны.м губкам 23.
Зажимные губки выполнены в виде качающихся на осях 22 двуплечих рычагов, снабженных взаимодействующими с подвижной опорой 27 роликами 28 и пружинами 29 растяжения.
На торце корпуса 18 крепится стакан 30 с трубопроводом 17 подвода рабочей жидкости, которая через проточки и отверстия смонтированной в стакане 30 и уплотненной шевронными резино-тканевыми манжетами распорной втулки 31 подается в канал 32 хвостовика гидроцилиндра 24.
Для балансировки механизма поворота и схвата предусмотрен закрепленный, на хвостовике гидроцилиндра 24 контгруз.
Предлагаемый манипулятор работает следующим образом.
После подачи изделия на приемный стол (на чертеже не показан), срабатывает гидроцилиндр 24. Рабочая жидкость из сети через гибкий рукав 14, стакан 13, распорную втулку 15, канал 16 вала 10, трубопровод 17, стакан 30, распорную втулку 31 и канал 32 подается в порщневую полость гидроцилиндра 24. Шток 26 выдвигает подвижную опору
27,которая, преодолевая усилия пружин растяжения 29, разводит своим конусом ролики
При выходе роликов 28 на цилиндрическую часть подвижной опоры 27 зажимные губки получают жесткое фиксирование, и при дальнейщем движении шток гидроцилиндра 24 своей торцовой поверхностью прижимает изделие к сведенным зажимным губкам 23, при этом давление рабочей жидкости в гидроцилиндре 24 повышается до заданного. Установленный в гидросистеме датчик, например электроконтактный манометр (на чертеже не показан), дает команду на срабатывание пневмоцилиндра 4, шток которого перемещает вдоль оси О-О влево по направляющим 1 станины манипулятора каретку 2 с закрепленными на ней коническим зубчатым сектором 3 и механизмом поворота со схватом. Ролик 12 вилки 11, перемещаясь по пазу направляющей 5, удерживает через вал 10 и схват изделие в строго фиксированном положении до его схода с приемного стола.
После схода изделия-с приемного стола ролик 12 выходит из паза направляющей 4, а паз вилки 11 входит в контакт с роликом 6. Вилка 11, обкатываясь своим пазом вокруг ролика 6, поворачивает в корпусе 7 на двух радиальных 8 и на двух упорных 9 шарикоподшипниках вал 10 с жестко закрепленным на его кронштейне корпусом 18 схвата, при этом коническое зубчатое колесо 21, обкатываясь по коническому зубчатому сектору 3, приводит во вращение относительно продольной оси корпуса 18 схвата на двух радиальных шарикоподшипниках 19 гильзу 20 с изделием, схваченным зажимными губками 23. Происходит поворот изделия на 90° в горизонтальной плоскости на заданное расстояние с одновременным разворотом его на 180° относительно продольной оси корпуса 18 схвата.
В крайнем -левом положении каретки 2 подается команда на сброс давления рабочей жидкости в поршневой полости гидроцилиндра 24. Под действием пружины 25 рабочая жидкость вытесняется из поршневой полости гидроцилиндра 24 в обратной последовательности, а шток 26 вместе с подвижной опорой 27 возвращается в исходное положение, при этом под действием пружин 29 растяжения ролики 28 выходят на прямой участок меньщего диаметра подвижной опоры 27. Рычаги, поворачиваясь на осях 22, разводят зажимные губки 23, освобождая изделие.
После освобождения изделия схватом подается команда на возврат каретки 2 в исходное положение, при этом кинематика работы механизмов происходит в обратной по-. следовательности движения каретки 2 влево.
В крайнем правом положении манипулятор заканчивает цикл, и при подаче на при емный стол следующего изделия цикл повторяется.
Предлагаемый манипулятор может работать в обратной последовательности.
В случае необходимости манипулятор может быть выполнен с поворотом изделия на любой угол в пределах от О до 90° в горизонтальной плоскости от О до 180° относительно продольной оси схвата манипулятора, причем при постановке конического зубчатого сектора 3 и конического зубчатого колеса 21 со стороны хвостовика гидроцилиндра 24 можно изменить направление вращения изделия относительно продольной оси схвата. При простоте конструкции обеспечивается сокращение энергозатрат при работе предлагаемого манипулятора. Формула изобретения . Манипулятор, содержащий станину, несущую приводную каретку, а также схват, выполненный в виде приводимых от гидроцилиндра двух кинематически связанных с подвижной опорой поворотных зажимных губок, отличающийся тем, что, с целью упрощения конструкции и снижения энергозатрат, он снабжен закрепленными на стаГ
i Л г/ нине пневмоцилиндром, первым роликом и направляющей, а также закрепленными на каретке коническим зубчатым сектором и механизмом поворота схвата, выполненным в виде корпуса с установленным в нем валом, на одном конце которого закреплена вилка со вторым роликом, причем вилка установлена с возможностью взаимодействия с первым роликом, а второй ролик - с направляющей, закрепленной на станине, при этом на другом конце вала закреплен схват, выполненный в виде гильзы с зажимными губками и конического колеса, кинематически связанного с коническим зубчатым сектором, причем гидроцилиндр встроен в гиль2. Манипулятор по п. 1, отличающийся тем, что шток гидроцилиндра снабжен пружиной возврата. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 580053, кл. В 21 J 13/10, 1977.
