Изобретение относится к подъемно-транспортным машинам для перемещения подвешенных грузов в вертикальной плоскости и может найти применение в автоматических линиях, роботах-манипуляторах и технологических установках для погружения и извлечения длинномерных труб из вертикальных буровых скважин.
Известен грузоподъемный механизм, содержащий многозвенной рычажное устройство для приближенного перемещения в вертикальной плоскости шарнирного подвеса переносимого груза, выполненное в виде двухконтурного двухкоромыслового механизма с перемещением груза за счет изменения в ограниченных пределах угла наклона стрелы коромысла посредством телескопического гидроцилиндра, установленного между неподвижным основанием и коромыслом (Крайнев А.Ф. Словарь-справочник по механизмам. - М: Машиностроение, 1987, с. 317, рис. а) - аналог.
Недостатками известного грузоподъемного механизма являются:
1. Ограниченная рабочая зона перемещения груза на шарнирном подвесе.
2. Перегрузка приводного двигателя при подъеме груза.
3. Сложность конструкции и сборки многошарнирных звеньев разной длины.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является грузоподъемный манипулятор, содержащий основание с установленным на нем шарнирно-сочлененным устройством перемещения гибкого подвеса с переносимым грузом, выполненным в виде кинематически связанных между собой двух кривошипных механизмов и одного поворотного двухкоромыслового механизма привода поворотной стрелы крана с удлиненным шатуном (статья Енчев К.И., Стойков С.Б. Совмещение экстремального и оптимизационного синтеза при проектировании направляющего механизма портального крана // Теория механизмов и машин, №2 (12), 2008, Том 6. - Изд-во СПбГПУ, схема грузоподъемного устройства на стр. 38, рис. 3) - прототип.
Недостатками указанного механического устройства грузоподъемного манипулятора являются:
1. Ограниченная рабочая зона вертикального перемещения подвешенного на стреле коромыслового механизма переносимого груза из-за предельного допустимого по максимальным углам давления угла колебаний стрелы с грузом (при повышении которых происходит заклинивание, т.е. неработоспособность рычажного механизма).
2. Неравномерная внутри каждого цикла «подъем-опускание груза» загрузка приводного двигателя с его двухкратной перегрузкой во время подъема груза - что приводит к необходимости применения приводного двигателя повышенной мощности, габаритов, веса и стоимости.
3. Сложность конструкции шарнирно-сочлененного устройства грузоподъемного манипулятора, состоящей из сложных и трудоемких в изготовлении и сборке трехшарнирных и четырехшарнирных звеньев рычагов разной длины и количества.
В основу изобретения положена техническая задача, заключающаяся в увеличении рабочего пространства перемещения подвешенного на гибком подвесе груза, снижение загрузки приводного двигателя, уменьшения габаритов грузоподъемного манипулятора и упрощения его конструкции.
Получение технического результата достигается за счет того, что установленное на основании манипулятора шарнирно-сочлененное устройство перемещения гибкого подвеса с переносимым грузом выполнено в виде четырехзвенной ромбовидной кинематической цепи шарнирного ромба, образующего подвижный четырехугольный замкнутый контур, в котором гибкий подвес закреплен на одной из вершин шарнирного ромба и обхватывает круглый шкив на противоположной вершине шарнирного ромба, а две другие вершины шарнирного ромба соединены между собой посредством упругого элемента и кинематически связаны с основанием посредством двойных цилиндрических шарниров и поворотных рычагов.
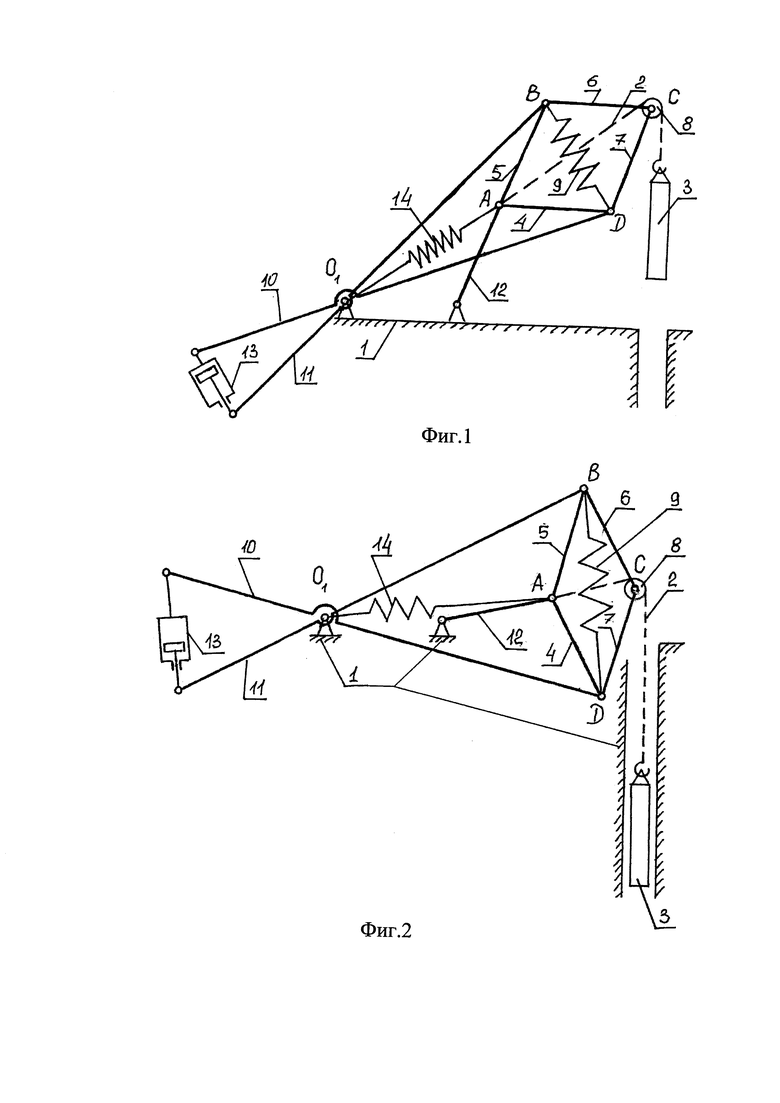
Сущность изобретения поясняется чертежами, где на фиг. 1 и фиг. 2 изображен грузоподъемный манипулятор с шарнирно-сочлененным устройством перемещения гибкого подвеса с переносимым грузом при его подъеме (фиг. 1) или опускании (фиг. 2).
Данное шарнирно-сочлененное устройство перемещения гибкого подвеса 2 с грузом 3 установлено на основании 1 и выполнено в виде четырехзвенной ромбовидной кинематической цепи шарнирного ромба ABCD, образующего четырехугольный замкнутый контур из звеньев 4, 5, 6 и 7, в котором гибкий подвес 2 с переносимым грузом 3 одним концом закреплен на одной из вершин А шарнирного ромба, расположен вдоль диагонали АС ромба ABCD и обхватывает круглый шкив 8, установленный на противоположной вершине С шарнирного ромба ABCD; две другие противоположные вершины В и D шарнирного ромба ABCD соединены между собой посредством деформируемого при опускании груза 3 упругого элемента 9, а ромбовидная кинематическая цепь шарнирного ромба ABCD кинематически связана с основанием 1 посредством двойных цилиндрических шарниров A, B и D и поворотных рычагов 10, 11 и 12, из которых поворотные рычаги 10 и 11 взаимосвязаны между собой посредством приводного подвижного гидроцилиндра 13. Дополнительно между основанием 1 и шарнирным ромбом ABCD вдоль диагонали АС шарнирного ромба установлен упругий элемент 14, например, в виде пружины растяжения, обеспечивающий фиксацию шарнирно-сочлененного устройства перемещения в заданном исходном положении закрепления на гибком подвесе 2 переносимого груза 3.
Работа представленного грузоподъемного манипулятора заключается в следующем. При подаче рабочей жидкости в поршневую полость гидроцилиндра 13 одновременно происходит:
а) уменьшение длины диагонали АС шарнирного ромба ABCD (за счет сближения вершин А и С ромба) и угловой поворот по часовой стрелке этой диагонали АС вокруг оси вращения в точке O1 основания 1 - результатом этого является увеличенная в 2 раза рабочая зона перемещения вниз в процессе опускания груза 3 как за счет углового поворота диагонали АС, так и за счет уменьшения длины этой диагонали АС шарнирного ромба ABCD (в результате сближения вершин A и С ромба);
б) увеличение длины другой диагонали BD шарнирного ромба ABCD и растяжение установленного между вершинами В и D упругого элемента 9, в результате чего работа силы тяжести от перемещения груза 3 переходит в потенциальную энергию упругого элемента 9 и затем при подъеме груза 3 (в результате подачи рабочей жидкости в штоковую полость гидроцилиндра 13) эта накопленная в упругом элементе 9 энергия будет разгружать привод подъема груза - в результате чего расход мощности приводного двигателя на подъем груза 3 будет уменьшаться в 1,5-2 раза (т.е. внутрицикловая нагрузка гидропривода будет более равномерной и сниженной).
Достигаемый в предлагаемом грузоподъемном манипуляторе положительный эффект заключается в следующем:
1. Увеличивается в 2 раза рабочая зона вертикального перемещения подвешенного груза - за счет переменной геометрии шарнирного ромба ABCD (в результате согласованного уменьшения одной из его диагоналей совместно с увеличением другой его диагонали) совместно с угловым поворотом всего шарнирного ромба ABCD, что вызывает удвоенное перемещение груза 3 как при его подъеме, так и при его опускании.
2. Уменьшается в 1,5-2 раза необходимая для подъема груза внутрицикловая мощность гидропривода за счет возврата энергии от силы тяжести груза при его опускании.
3. Снижаются габариты грузоподъемного манипулятора, необходимые для реализации заданной рабочей зоны перемещения груза по вертикали.
4. Упрощается конструкция грузоподъемного манипулятора за счет применения при сборке его шарнирно-сочлененного устройства перемещения груза простых двухшарнирных рычагов одинаковой длины, что также снижает трудоемкость и стоимость изготовления и сборки узлов грузоподъемного манипулятора.
5. За счет применения в конструкции данного манипулятора всех шарнирных соединений подвижных звеньев повышается надежность и срок его службы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728851C1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| ШАРНИРНЫЙ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728850C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ ПОДЪЕМНИК ПОДВЕСНОГО ГРУЗА | 2021 |
|
RU2770954C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ | 2019 |
|
RU2737249C1 |
| VIP-МЕХАНИЗМ ДЛЯ ПРЯМОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ПОДВЕШЕННОГО ГРУЗА | 2015 |
|
RU2605701C1 |
| ПОДВИЖНАЯ МЕХАНИЧЕСКАЯ СИСТЕМА СЕЙСМОЗАЩИТЫ ЗДАНИЯ | 2020 |
|
RU2742677C1 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
Изобретение относится к подъемно-транспортным машинам для перемещения подвешенных грузов в вертикальной плоскости и может найти применение в автоматических линиях, роботах-манипуляторах и технологических установках для погружения и извлечения длинномерных труб из вертикальных буровых скважин. Грузоподъемный манипулятор содержит шарнирно-сочлененное устройство перемещения подвеса с переносимым грузом, выполненное в виде четырехзвенной ромбовидной кинематической цепи шарнирного ромба. Шарнирный ромб кинематически связан с основанием посредством двойных цилиндрических шарниров и поворотных рычагов, взаимосвязанных между собой через приводной подвижный гидроцилиндр. Изобретение обеспечивает увеличение в 2 раза рабочей зоны перемещения подвешенного груза, уменьшение в 1,5-2 раза необходимой для подъема груза внутрицикловой мощности гидропривода и упрощение конструкции грузоподъемного манипулятора при снижении трудоемкости изготовления и сборки его узлов. 1 з.п. ф-лы, 2 ил.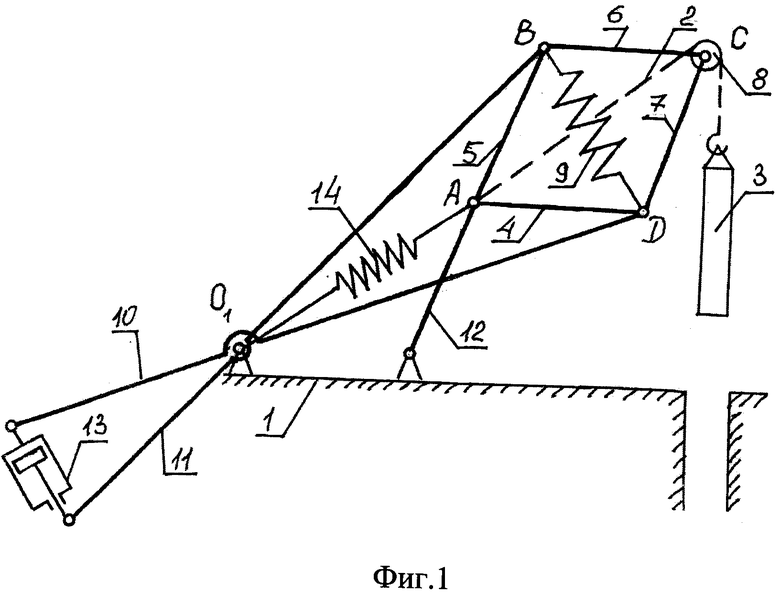
1. Грузоподъемный манипулятор, содержащий основание с установленным на нем шарнирно-сочлененным устройством перемещения гибкого подвеса, отличающийся тем, что шарнирно-сочлененное устройство перемещения выполнено в виде четырехзвенной ромбовидной кинематической цепи шарнирного ромба, образующего подвижный четырехугольный замкнутый контур, в котором гибкий подвес с переносимым грузом одним концом закреплен на одной из вершин шарнирного ромба, расположен вдоль одной из диагоналей ромба и обхватывает круглый шкив, установленный с возможностью поворота на противоположной вершине шарнирного ромба; две другие противоположные вершины шарнирного ромба соединены между собой посредством деформируемого при опускании груза упругого элемента, а ромбовидная кинематическая цепь шарнирного ромба кинематически связана с основанием посредством двойных цилиндрических шарниров и поворотных рычагов, взаимосвязанных между собой посредством приводного подвижного гидроцилиндра.
2. Грузоподъемный манипулятор по п. 1, отличающийся тем, что между основанием и шарнирным ромбом вдоль диагонали ромба с круглым шкивом установлен упругий элемент, обеспечивающий фиксацию шарнирно-сочлененного устройства перемещения в заданном исходном положении закрепления на гибком подвесе переносимого груза.
| Устройство для подъема грузов | 1975 |
|
SU539824A1 |
| Монтажный портал | 1979 |
|
SU787352A1 |
| Манипулятор | 1975 |
|
SU528194A2 |
| Шарнирно-рычажный механизм | 1983 |
|
SU1150422A1 |
| US 5795004 A1, 18.08.1998. | |||

