Область техники, к которой относится изобретение
Изобретение, в целом, относится к области робототехники и автоматизации, а именно к устройству повышения устойчивости робота, или другой системе позиционирования, к ударам и тряске.
Сведения о предшествующем уровне техники
Роботы широко используются в различных областях промышленности, но как правило, в таких областях, в которых важную роль играет точность, и непрерывно повторяются одни и те же операции. Примером такой операции является производство печатных плат, где робот оснащен подходящим захватным элементом, который захватывает какой-либо компонент и точно помещает его на печатную плату для последующих этапов производства.
Требования к роботам варьируются в зависимости от условий, в которых они эксплуатируются. Примером являются определенные условия эксплуатации, при которых поднимаются тяжелые грузы, а роботы функционируют в загрязненных условиях и подвержены сотрясениям, таким как внезапные удары и толчки.
Примером таких условий является промышленность по утилизации отходов, где отходы сортируются, например с конвейерной ленты. Роботы запрограммированы на сбор и переработку отходов в соответствии с характеристиками таких отходов. Очевидно, что сортировка отходов является непростой задачей не только из-за того, что отдельные элементы отходов различаются по массе и форме, но и по той причине, что поток отходов на конвейерной ленте постоянно меняется. В сортировке подобного рода одним из требований, предъявляемых к роботам, в дополнение к скорости, является то, что во время работы роботы не должны быть восприимчивы сотрясениям. Затраты за время простоя станции автоматической сортировки отходов являются значительными и, таким образом, желательно принять меры по минимизированию влияния ожидаемых сотрясений во время работы.
Наиболее восприимчивым к сотрясениям устройством в роботах является рабочий элемент, например захватное устройство. Предметы на конвейерной ленте различаются по размеру и весу и во время работы могут смещаться или перекатываться. Столкновения с предметами на конвейере или инерция собранных предметов может вызвать сотрясения в роботе. Кроме того, на конвейерной ленте могут использоваться несколько роботов, так что два или более роботов или переносимые ими грузы неизвестной формы могут столкнуться по любой причине, вызвав тем самым серьезное повреждение роботов.
В уровне техники существует несколько вариантов предотвращения такого повреждения роботов. Обычно, это либо соответствующее конструктивное исполнение, такое как деформируемые или разрушающиеся части, либо оперативные способы предотвращения повреждения, например, распознавание возможного столкновения посредством использования сенсорного устройства какого-либо вида.
При соответствующем конструктивном исполнении части робота, например шарнирный манипулятор, выполняются так, чтобы по меньшей мере частично быть гибкими. Это достигается, например, посредством выбора материала в конструкции манипулятора. К примеру, между двумя частями, например манипулятором и захватным устройством, может быть размещен некоторый эластичный материал, который позволяет во время сотрясения сгибать указанные части относительно друг друга. Другим примером являются решения, базирующиеся на манипуляторе с пружиной, которые также предназначены для минимизирования возможного повреждения в случае сотрясения. К третьей категории решений уровня техники, направленных на предотвращение повреждения, относятся устройства, содержащие части, которые деформируются или разрушаются, когда во время сотрясения превышается заранее заданное усилие.
Примером оперативных способов предотвращения повреждения, согласно решениям уровня техники, являются системы, в которых функционирование робота отслеживается датчиками и, если обнаруживается ситуация, которая может привести к повреждению, вносятся изменения с целью предотвратить повреждение, например, путем остановки робота.
В публикации US 7327112 B1 раскрыт пример гашения ударов в роботизированном оборудовании. Данная публикация раскрывает кувыркающийся робот, в котором система управления координирует действия нескольких ног робота, чтобы заставить робот кувыркаться в каком-либо направлении. Ноги робота соединены проволочными растяжками, которые не только удерживают робот в определенной форме, но и также, в случае, когда оптимально подобран материал указанных растяжек, гасят сотрясения ног, контактирующих с землей.
В публикации US 5116190 раскрыт другой пример механизма подвески в области роботехники. Данная публикация раскрывает механизм деформации с тросовой подвеской, который предназначен для размещения между двумя пластинами и содержит несущие тросы, элементы жесткости и натяжные тросы. Регулируя элементы жесткости можно корректировать уровень упругости. Это обеспечивает возможность использования такой конструкции при позиционировании захватного элемента робота, благодаря чему изделие может быть захвачено оптимальным образом.
Некоторые недостатки решений уровня техники заключаются в том, что указанные решения дороги для осуществления, например основывающиеся на датчиках оперативные способы, или в том, что указанные решения сложны для осуществления в отношении роботов, предназначенных для функционирования в сложных условиях, например, таких как роботы для сортировки отходов. Кроме того, решения уровня техники, основанные на разрушающихся частях, например зажимах, не могут быть использованы в условиях, при которых простой всей системы, в то время как робот находится на ремонте, невозможен, в принципе. К тому же, за счет сложности решений уровня техники, ремонт занимает много времени, что опять же не является приемлемым, например, в решениях роботехники, где простой системы приносит владельцу предприятия значительные затраты.
Сущность изобретения
Задача изобретения заключается в том, чтобы предложить для конструкции робота устройство, которое снижает риск его повреждения, даже в случае, когда робот получает сотрясение. Кроме того, задача изобретения заключается во внедрении в конструкцию робота устройства, являющегося достаточно жестким, чтобы использоваться в условиях, в которых важную роль играет точность.
Решение поставленных задач изобретения достигается посредством размещения податливого крепежного элемента между роботом и рабочим элементом. Податливый крепежный элемент осуществляется путем размещения тросовой сборки между двумя монтажными плитами, имеющими заранее заданное расстояние, в результате чего конструкция крепежного элемента является, по существу, жесткой до тех пор, пока внешняя сила, превышающая заранее заданный уровень, не окажет воздействия на этот элемент, вследствие чего он станет по меньшей мере частично податливым и, таким образом, предотвратит серьезное повреждение робота.
В одном из вариантов изобретения между двумя монтажными плитами размещен растягивающийся элемент, причем при приведении растягивающегося элемента в действие он вызывает противодействующую силу в указанной тросовой сборке и, таким образом, вся конструкция становится более жесткой.
В одном из вариантов изобретения указанный растягивающийся элемент представляет собой пружину. В другом варианте изобретения растягивающийся элемент представляет собой гидроцилиндр или пневмоцилиндр.
В еще одном варианте изобретения форма указанных первой и второй монтажных плит является квадратной, но в другом варианте изобретения форма указанных первой и второй монтажных плит является треугольной со срезанными углами.
Преимущество, согласно настоящему изобретению, заключается в том, что предложенная конструкция очень проста и, таким образом, дешева в производстве и ремонте. Кроме того, ремонт выполняется быстро и, таким образом, время простоя в случае повреждения робота, является относительно малым. Согласно изобретению, предложенному элементу не свойственен гистерезис при деформации, что обеспечивает контроль робота даже во время сотрясения.
Варианты осуществления изобретения, изложенные в данной заявке, не должны толковаться как накладывающие ограничения на применимость прилагаемой формулы изобретения. Глагол "содержать" используется в данной заявке в расширительном смысле, что не исключает существование других не указанных признаков. Признаки, изложенные в зависимых пунктах, являются свободно комбинируемыми друг с другом, если явно не указано иное.
Новые признаки, которые рассматриваются в качестве характеристики изобретения, изложены, в частности, в прилагаемой формуле изобретения. Однако само изобретение, как в отношении его устройства, так и его способа эксплуатации, совместно с его дополнительными задачами и преимуществами, будет лучше всего понято при прочтении нижеприведенного описания определенных вариантов осуществления изобретения совместно с прилагаемыми чертежами.
Перечень Фигур чертежей
На фиг. 1 показан пример манипулятора робота, известного из уровня техники.
На фиг. 2a-b показан вариант осуществления изобретения.
На фиг. 3a-b показаны другие варианты осуществления изобретения.
На фиг. 4 показан дополнительный вариант осуществления изобретения.
На фиг. 5 показан еще один дополнительный вариант осуществления изобретения.
Осуществление изобретения и его предпочтительные варианты
Ниже приведены некоторые предпочтительные варианты осуществления изобретения со ссылкой на вышеописанные фигуры.
На фиг. 1 показан пример, в целом, известного манипулятора робота. Этот пример манипулятора робота максимально широко раскрывает основные части, которые также актуальны в контексте настоящего изобретения. Робот содержит манипулятор, то есть манипулятор 101 робота. В этом примере манипулятор 101 робота состоит из двух частей, которые шарнирно соединены друг с другом. Манипулятор 101 робота соединен с захватным элементом 102 с помощью общеизвестной конструкции соединения, что обеспечивает, в добавление к любому шарнирному элементу в манипуляторе 101, перемещение захватного устройства в трех плоскостях. В соответствии с общеизвестным способом, управление манипулятором робота и его частями осуществляется с помощью центрального блока управления, который передает управляющие сигналы на двигатели робота так, что могут осуществляться требуемое перемещение и захват. Кроме того, захватный элемент 102 может быть заменен любым рабочим инструментом, пригодным для использования в областях робототехники.
На фиг. 2a показан вариант настоящего изобретения, согласно которому робот содержит манипулятор 101 и захватный элемент 102, аналогичные тем, что раскрыты на фиг. 1.
Кроме того, в соответствии с настоящим изобретением между манипулятором 101 робота и захватным элементом 102 расположен крепежный элемент, состоящий из первой монтажной плиты 201, выполненной с возможностью соединения с манипулятором 101 робота. Соединение может быть установлено, например, с помощью шарнирного механизма или с помощью шарового шарнира так, что относительно манипулятора 101 возможно перемещение монтажной плиты 201 в трех плоскостях. В некоторых вариантах осуществления монтажная плита 201 выполнена с возможностью поворота по отношению к манипулятору 101 робота. Это может быть достигнуто посредством соответствующего вращающегося разъема, такого как вращающаяся ось или шаровой шарнир, и необходимых двигателей, которые прикладывают к монтажной плите 201 силу, необходимую для осуществления вращательного движения.
В соответствии с некоторыми вариантами изобретения крепежный элемент содержит вторую монтажную плиту 202, выполненную с возможностью установки на заранее заданном расстоянии d от первой монтажной плиты 201 за счет использования тросовой сборки 203. Вторая монтажная плита представляет собой плиту, с которой соединен захватный элемент 102. Согласно одному из вариантов изобретения, захватный элемент 102 прикреплен ко второй монтажной плите 202. Согласно другим вариантам изобретения, захватный элемент 102 соединен со второй монтажной плитой 202 с возможностью вращения. Это может быть достигнуто с помощью, например, управляемого подвижного подшипникового механизма, в результате чего захватный элемент 102 может быть повернут и выровнен относительно захватываемого предмета эффективным образом.
Расстояние между указанными первой и второй монтажными плитами и тросовой сборкой, преимущественно, выбирается таким образом, что податливость крепежного элемента при сотрясениях соответствует требуемому значению, например, весу захватного устройства, весу захватываемых и перемещаемых предметов и/или возможной внешней ударной силе, которой подвержены манипулятор 101 робота и/или захватный элемент 102. Регулировка расстояния между монтажными плитами регулирует величину силы, необходимой для гибкости указанного элемента.
В сущности, податливость элемента определяется геометрией тросовой сборки и силой, разделяющей монтажные плиты. Возможные скорости монтажных плит относительно друг друга, в положении покоя, можно рассматривать как 6-мерное пространство, соответствующее 6 степеням свободы перемещения монтажных плит (скорость в трех измерениях и угловая скорость в 3 измерениях). В указанном пространстве, каждый трос образует 5-мерную плоскость, разделяющую пространство возможных скоростей пополам.
Сила, разделяющая монтажные плиты, разделяет указанные плиты до тех пор, пока в каждом измерении не будет достигнут предел, в результате чего элемент примет положение покоя. Так как существует 6 степеней свободы перемещения, в устойчивом положении покоя натянутыми являются по меньшей мере 6 тросов. Положение покоя можно рассматривать свойственным потенциальной яме, сформированной с помощью пересекающихся ограничивающих плоскостей. Для того чтобы изменить это положение, например силой для деформации элемента в некотором направлении, деформирующая сила должна быть достаточно сильной, чтобы «поднять» указанное положение из потенциальной ямы.
Форма потенциала является важным аспектом изобретения. Простая пружина может быть использована в качестве устройства, устойчивого к ударам и тряске, для которого потенциал пропорционален x^2, где x обозначает перемещение. Такие устройства деформируются в непрерывном режиме, то есть любая по величине сила по меньшей мере немного деформирует устройство, делая его нежестким, шатающимся и неточным. Потенциал устройства согласно изобретению, напротив, пропорционален |x| (абсолютная величина перемещения), то есть "острый" по форме. Таким образом, устройство не деформируется вовсе до тех пор, пока деформирующая сила не превысит определенный порог, в результате чего при нормальной работе устройство является жестким. Порог силы может, в зависимости от геометрии тросовой сборки, различаться в разных направлениях и линейно масштабироваться по амплитуде разделяющей силы.
В некоторых вариантах изобретения, тросовый материал является, по существу, неэластичным, то есть тросы не растягиваются, но образуют жесткие пределы для расстояний между соединенными точками монтажных плит. Таким образом, тросовый материал, пока он является, по существу, неэластичным, не влияет на жесткость системы.
Важным аспектом некоторых вариантов изобретения является то, что каждый из тросов в тросовой сборке не соединен с другими, то есть, таким образом, они не образуют никаких непрерывных частей вблизи точек крепления. Каждый из тросов крепится к точке крепления некоторым общеизвестным способом, таким как пригодный узел и/или пригодный крепежный элемент.
На фиг. 2b показан пример трехмерной конструкции крепежного элемента согласно одному из вариантов настоящего изобретения. Кроме указанных монтажных плит 201, 202, крепежный элемент, как показано на фиг. 2b, содержит тросовую сборку. Указанные монтажные плиты 201, 202 соединены с помощью троса, проходящего от угла первой монтажной плиты к соответствующему углу второй монтажной плиты 202, как раскрыто со ссылкой 203a на фиг. 2b. Кроме того, угол первой монтажной плиты 201 соединен с углом второй монтажной плиты 202 с помощью перекрещивающегося троса 203b, как раскрыто на фиг. 2b. Точно таким же образом тросы размещены в каждом углу первой и второй монтажных плит 201, 202. Таким образом, такая тросовая сборка, в общей сложности, состоит из 12 тросовых частей. Посредством такого расположения тросов в тросовой сборке, конструкция является не податливой, то есть не нарушает нормальную работу робота, однако когда внешняя сила вызывает у робота сотрясение и указанная сила превышает заранее заданный уровень (заданный характеристиками тросовой сборки), тросовая сборка становится податливой, деформирующейся и гасящей указанную внешнюю силу таким образом, чтобы снизить риск нанесения роботу повреждения.
Несмотря на то, что на фиг. 2b показано, что монтажные плиты 201, 202 имеют квадратную форму, это никак не ограничивает возможность использования в изобретении плит с другими формами.
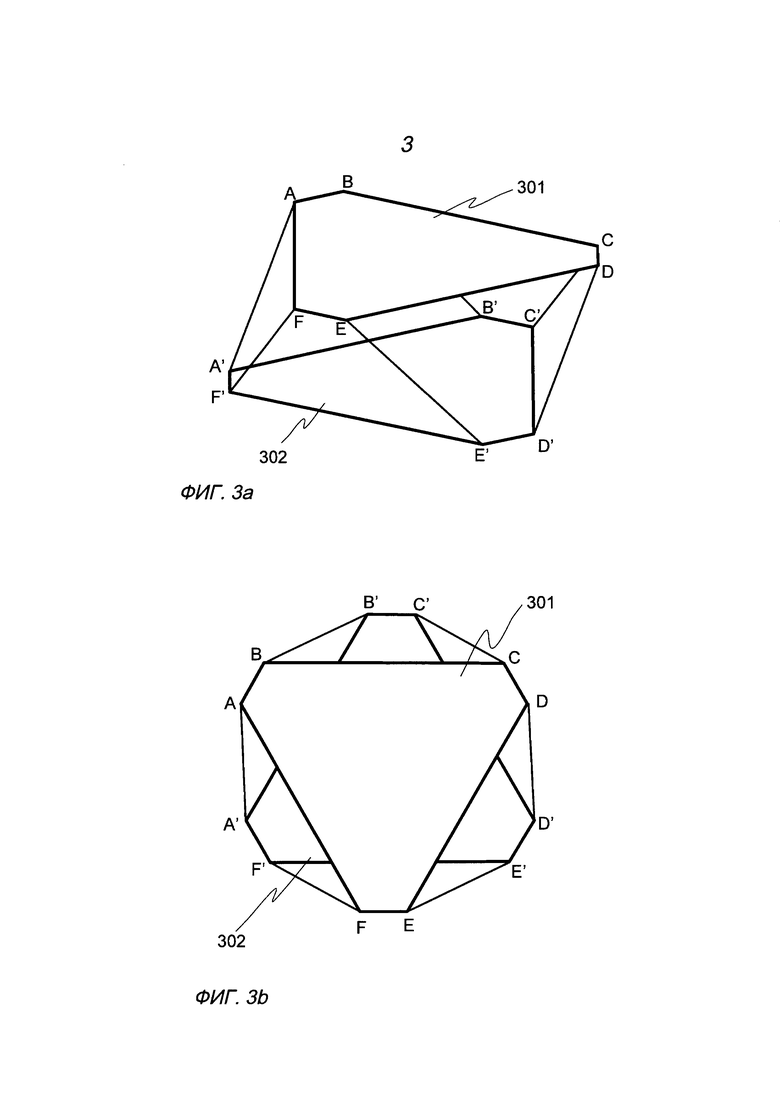
На фиг. 3a раскрыт другой пример изобретения, в котором монтажные плиты имеют форму треугольников с обрезанными углами. Первая монтажная плита 301 так же, как и ранее ,соединена со второй монтажной плитой 302 посредством тросовой сборки. Тросовая сборка, согласно данному варианту изобретения, устанавливается путем соединения при помощи троса каждого угла первой монтажной плиты 301 с ответствующим углом второй монтажной плиты 302. Таким образом, во всей тросовой сборке, в соответствии с фиг. 3a, растяжками являются: A-A', B-B', C-C', D-D', E-E' и F-F'.
Сборка с 6 тросами является предпочтительной, потому что это минимальное количество тросов, необходимых для покрытия всех шести степеней свободы перемещения системы. Следовательно, отсутствует необходимость тщательно настраивать натяжение и длину тросов, так как каждый трос туго натянут и задействован в системе. Согласно варианту осуществления изобретения, показанному на фиг. 3a, монтажные плиты 301, 302 выполнены с возможностью установки таким образом, чтобы обеспечивать перемежение плит 301, 302 по меньшей мере частично во время деформации формы тросовой сборки. Это показано на фиг. 3b, на которой показано перемежение углов монтажных плит. Преимущество перемежения углов заключается в том, что оно обеспечивает широкий диапазон перемещений крепежного устройства при сотрясении, вызванным внешней силой. Другими словами, когда робот получает сотрясение, перемежающиеся углы монтажных плит обеспечивают более широкое перемещение, чем, например, в показанном на фиг. 2a и 2b крепежном устройстве, поддаваясь воздействию силы сотрясения и, как следствие, снижают риск нанесения повреждений роботу, рабочему инструменту или крепежному устройству.
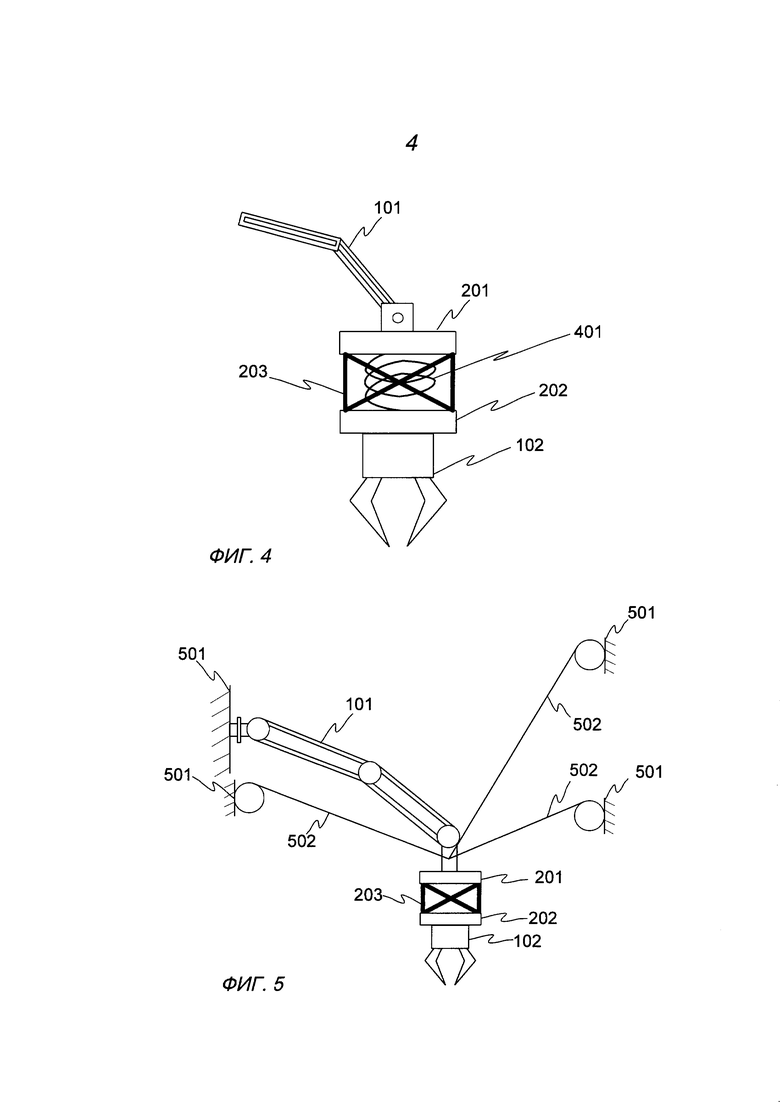
Некоторые варианты осуществления изобретения дополнительно содержат растягивающийся элемент для увеличения силы, удерживающей первую и вторую монтажные плиты в пределах заранее заданного расстояния друг от друга. Один такой вариант осуществления изобретения показан на фиг. 4. На фиг. 4 показан манипулятор робота с тросовой сборкой, аналогичный тому, что был раскрыт на фиг. 2. Поэтому совпадающие элементы здесь не раскрываются. В дополнение к указанным элементам, вариант изобретения на фиг. 4 содержит растягивающийся элемент 401, который в данном примере представляет собой пружину. Пружина отрегулирована таким образом, что она находится в активной конфигурации, то есть напряжена, когда она установлена в тросовой сборке между первой и второй монтажными плитами. Другими словами, пружина вызывает по меньшей мере частично силу, противодействующую силе в тросовой сборке. Итоговый результат такой конструкции заключается в том, что крепежный элемент в целом становится более жестким, и, таким образом, заранее заданный уровень силы, при котором деформируется форма тросовой сборки, может быть отрегулирован посредством управления сжимающей силой растягивающегося элемента.
Одно дополнительное преимущество использования растягивающегося элемента в крепежном устройстве заключается в том, что весь манипулятор робота имеет возможность функционировать во множестве различных положений, например, оператор может повернуть манипулятор для того, чтобы направить захватное устройство в сторону или даже вверх. Это расширяет возможности использования изобретения в различных областях робототехники.
В некоторых примерах изобретения, растягивающийся элемент 401 представляет собой гидроцилиндр, прикладывающий растягивающее усилие к первой и второй монтажным плитам. Аналогичный эффект может быть достигнут пружиной, работающей на сжатие; пневмоцилиндром; соленоидом и/или серводвигателем, регулирующим винтообразный растягивающий элемент, а также сильфонным приводом или другой пневматической рессорой, например.
Растягивающийся элемент, преимущественно, расположен в середине крепежного устройства для достижения симметричности. В альтернативном варианте предусмотрено несколько растягивающихся элементов, например, по одному для каждого угла монтажных плит, применяемых в устройстве. Согласно некоторым вариантам изобретения, положение по меньшей мере одного растягивающегося элемента выбирают в соответствии с наиболее вероятным направлением деформирования. Это дает возможность регулировки заранее заданного уровня силы, необходимого для деформирования пружины. В некоторых дополнительных вариантах изобретения, растягивающийся элемент встроен в тросовую сборку. В дополнение или альтернативно, на место тросов могут быть установлены гидроцилиндры, или пневмоцилиндры, или пружины так, что они образуют подобные ограничивающие соединения, как если бы были установлены тросы, но при этом также могут функционировать как растягивающиеся элементы. Такой крепеж может содержать петли, шаровые шарниры, отрезки тросов или другие упругие крепежные механизмы между концами растягивающихся элементов и монтажными плитами.
Кроме того, крепежный элемент может применяться в других типах роботов, нежели манипуляторы роботов. Например, рабочий инструмент робота, который управляется посредством тросов управления, установленных в несущую конструкцию, такую как стена, может использовать крепежный элемент, показанный на фиг. 5. На фиг. 5 раскрыт рабочий инструмент робота, такой как захватный элемент 102, который установлен на опорную конструкцию 501 с манипулятором 101. Контроль над роботом осуществляется при помощи тросов 502, которые приводятся в движение с помощью соответствующего двигателя, такого как серводвигатели. Кроме того, две монтажные плиты 201, 202, а также крепежный элемент, содержащий тросовую сборку 203, как описано, например, при рассмотрении фиг. 2a, используются с этим типом робота. Аналогично, крепежное устройство применимо в общеизвестных роботах, работающих в декартовой системе координат, или портальных роботах, или роботах других типов.
На монтажных плитах или тросах могут быть установлены датчики. Датчики подключены к системе, управляющей роботом, как правило, таким образом, что показания датчиков отбираются с использованием, например АЦП, преобразователей или других компонентов интерфейса датчика, которые затем подключаются к системе управления роботом. Показания датчиков, измеряющих расстояние между монтажными плитами, могут быть использованы для контроля выравнивания устройства. Система управления может быть выполнена с возможностью, например, остановки системы и/или генерирования сигнала о неисправности с целью избежать повреждения робота. Система управления может также использовать показания датчиков для вычисления точного положения захвата, принимая во внимание положение захватного устройства, или для планирования или совершения в реальном времени более точных движений после захвата объекта. Показания датчиков могут быть использованы для вычисления веса захваченного объекта. Датчики могут быть, например, инфракрасными датчиками расстояния, камерами, кодовыми датчиками положения или датчиками, контролирующими давление в гидроцилиндрах, или пневмоцилиндрах, или пневматических рессорах, функционирующих в качестве растягивающегося элемента (растягивающихся элементов) или тросов, как было описано выше. Таким же образом могут быть использованы датчики, измеряющие силы, воздействующие на тросы или монтажные плиты. Такими датчиками, например, могут быть тензодатчики или пружины, оснащенные потенциометрами.
В некоторых вариантах изобретения, обеспечена возможность регулировки выравнивания монтажных плит посредством регулирования длины соответствующих тросов так, чтобы обеспечивалось оптимальное выравнивание. Для такого решения могут потребоваться один или несколько двигателей, которые будут использоваться при выравнивании плит. Одно такое решение содержит регулируемые винты, такие как стяжные болты или винтовые стяжки.
Согласно некоторым вариантам изобретения, тросовая сборка соединена прямо с плитой манипулятора робота и/или плитой захватного элемента без каких-либо специальных монтажных плит. Кроме того, несмотря на то, что в вышеуказанных вариантах изобретения раскрыто, что первая монтажная плита монтируется в направлении манипулятора робота, указанный монтаж может быть осуществлен другими способами. Например, с первой монтажной плитой может быть соединено необходимое число растяжек, регулируемых, например, с помощью серводвигателей, для обеспечения для захватного устройства подходящей системы управления перемещением.
Термин «трос» в данном контексте никоим образом не ограничивает его материал или форму. Трос, как таковой, может представлять собой канат, стальной многожильный трос, ремень или что-то подобное, что имеет характеристики, пригодные для использования в описанных здесь применениях. В качестве тросовой конструкции может быть использована цилиндрическая или трубчатая, в виде носка, конструкция, выполненная из тросового материала, посредством прикрепления оправ с каждого конца цилиндрической конструкции к каждой монтажной плите; в результате конструкция функционирует как тросовая сборка с большим числом почти параллельных тросов. В предпочтительном случае тросовый материал является неэластичным, то есть, когда внешняя сила вызывает деформацию формы тросовой сборки, он, по существу, не растягивается. Кроме того, для тросового материала, применяемого в роботах, используемых на сортировке отходов, важным общим требованием является износостойкость.
В раскрытых здесь вариантах осуществления показано, что крепежное устройство, согласно изобретению, применяется между манипулятором робота и захватным устройством. В других вариантах изобретения крепежное устройство может быть прикреплено к другим частям роботов, например, между двумя элементами манипулятора робота. Выбор расположения крепежного устройства может быть основан, например, на экспериментах, направленных на выяснение того, какая часть робота является наиболее уязвимой к внешним сотрясениям, и/или какое расположение крепежного устройства обеспечивает манипулятору робота наилучшую защиту от повреждений. Кроме того, применение изобретения не ограничивается только захватным элементом, так как изобретение может применяться в любых существующих типах рабочего инструмента робота. Примеры рабочих инструментов включают в себя магниты для захвата магнитного материала и/или определенные рабочие инструменты для определенных потребностей, например режущий инструмент.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ РОБОТ ДЛЯ ИНТЕРВЕНЦИОННОЙ АНГИОГРАФИЧЕСКОЙ ХИРУРГИИ И ИНТЕРВЕНЦИОННОЙ ТЕРАПЕВТИЧЕСКОЙ ХИРУРГИИ | 2021 |
|
RU2760468C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДЕФОРМАЦИИ И СПОСОБЫ ЕГО ИСПОЛЬЗОВАНИЯ В МЕХАНИЧЕСКИХ СТРУКТУРАХ, ПОДВЕРГАЮЩИХСЯ НАПРЯЖЕНИЮ | 1991 |
|
RU2110044C1 |
| Манипулятор для сборки пучка тепловыделяющих элементов | 2023 |
|
RU2815268C1 |
| Базовая станция, роботизированная система чистки и способ ее управления | 2020 |
|
RU2785339C1 |
| УСТРОЙСТВО И СПОСОБ РАЗЪЕДИНЕНИЯ И ТРАНСПОРТИРОВКИ ПОДЛОЖЕК | 2007 |
|
RU2380305C2 |
| АВТОМАТИЗИРОВАННОЕ МОНТАЖНОЕ УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ УСТАНОВКИ ПОДЪЕМНОГО УСТРОЙСТВА В ШАХТЕ ЛИФТА | 2016 |
|
RU2722774C2 |
| СИСТЕМА ПУСКА РАКЕТ И ВСПОМОГАТЕЛЬНАЯ АППАРАТУРА | 2011 |
|
RU2551047C2 |
| ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ ДЛЯ ВСТАВКИ КОМПОНЕНТОВ В ИЗДЕЛИЕ | 2016 |
|
RU2714974C2 |


Изобретение относится к области робототехники и автоматизации, а именно к крепежному элементу для повышения устойчивости робота к ударам и тряске. Крепежный элемент выполнен с возможностью установки в том же управляемом блоке, что и рабочий инструмент робота, и содержит первую плиту (201) и вторую плиту (202), обращенную к элементу рабочего инструмента робота. Первая и вторая плиты (201; 202) выполнены с возможностью соединения с тросовой сборкой (203), тросовый материал в которой является, по существу, неэластичным. Тросовая сборка выполнена с возможностью при воздействии внешней силы, превышающей заранее заданный уровень, уменьшать повреждение, вызванное указанной силой, за счет деформации своей формы. Изобретение позволяет снизить риск повреждения робота в случае получения им сотрясения и использовать его в условиях, требующих точность. 14 з.п. ф-лы, 5 ил.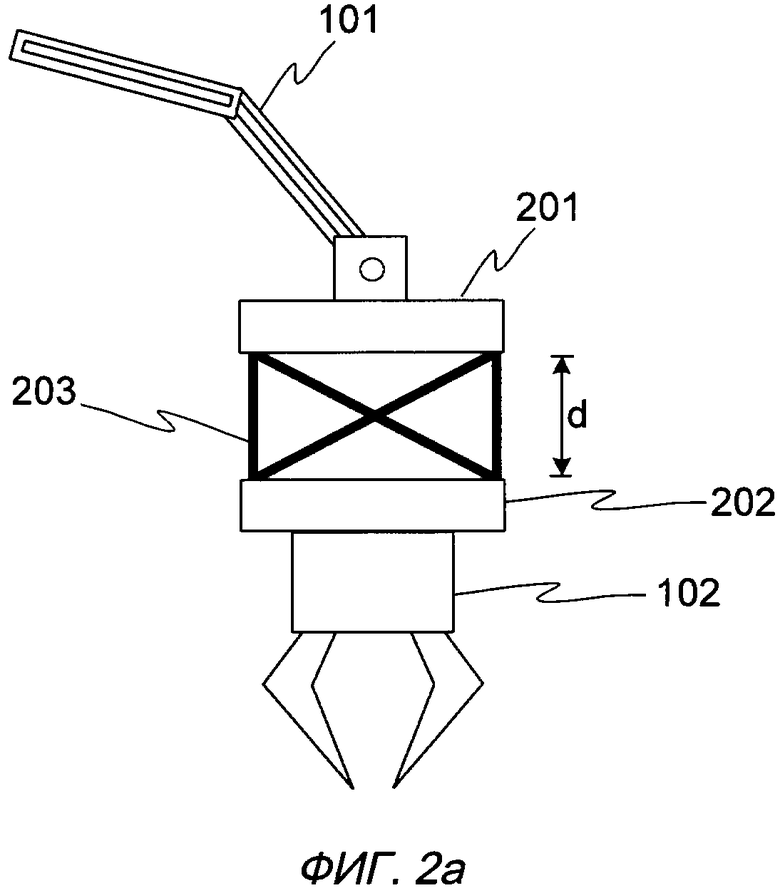
1. Крепежный элемент для повышения устойчивости робота, содержащего рабочий инструмент, к ударам и тряске, отличающийся тем, что он выполнен с возможностью установки в управляемом блоке робота, который содержит рабочий инструмент робота, при этом крепежный элемент содержит:
- первую плиту (201) и
- вторую плиту (202), обращенную к рабочему инструменту робота,
- при этом указанные первая и вторая плиты (201, 202) выполнены с возможностью соединения с тросовой сборкой (203), тросовый материал в которой является, по существу, неэластичным,
- причем тросовая сборка (203) выполнена с возможностью, в случае воздействия внешней силы, превышающей заранее заданный уровень, который определен по меньшей мере частично геометрией тросовой сборки, обеспечить уменьшение повреждения, вызванного указанной силой, за счет деформации своей формы.
2. Крепежный элемент по п. 1, отличающийся тем, что он дополнительно содержит по меньшей мере один растягивающийся элемент (401) для регулирования указанного заранее заданного уровня силы, вызывающей деформацию формы тросовой сборки.
3. Крепежный элемент по п. 2, отличающийся тем, что регулирование указанного заранее заданного уровня силы, вызывающей изменение формы тросовой сборки, обеспечивается за счет регулирования сжимающего усилия растягивающегося элемента (401).
4. Крепежный элемент по п. 2 или 3, отличающийся тем, что указанный растягивающийся элемент (401) представляет собой по меньшей мере одно из следующего: пружину, гидроцилиндр, пневмоцилиндр, соленоид, серводвигатель, регулирующий винтообразный растягивающийся элемент, пневматическую рессору.
5. Крепежный элемент по п. 2 или 3, отличающийся тем, что растягивающийся элемент (401) встроен в тросовую сборку.
6. Крепежный элемент по любому из пп. 1-3, отличающийся тем, что первая и вторая плиты (201, 202) выполнены с возможностью по меньшей мере частично перемежаться во время деформации формы тросовой сборки.
7. Крепежный элемент по любому из пп. 1-3, отличающийся тем, что каждый из тросов (203a, 203b), образующих тросовую сборку (203), отрегулирован до натянутого состояния.
8. Крепежный элемент по любому из пп. 1-3, отличающийся тем, что в тросовой сборке (203) тросы (203a, 203b) не соединены друг с другом.
9. Крепежный элемент по п. 7, отличающийся тем, что в тросовой сборке (203) каждый из тросов (203a, 203b) прикреплен к первой и второй плитам (201, 202).
10. Крепежный элемент по любому из пп. 1-3, 9, отличающийся тем, что тросовая сборка (203) состоит из шести тросов.
11. Крепежный элемент по любому из пп. 1-3, 9, отличающийся тем, что он содержит по меньшей мере один датчик для контроля выравнивания этого элемента.
12. Крепежный элемент по п. 11, отличающийся тем, что указанный датчик представляет собой лазерный или инфракрасный датчик расстояния, камеру, кодовый датчик положения, тензодатчик, потенциометр или датчик, контролирующий давление в гидроцилиндре, или пневмоцилиндре, или пневматической рессоре.
13. Крепежный элемент по п. 11, отличающийся тем, что в нем предусмотрена возможность выдачи сигнала о неисправности на основании указанного выравнивания, измеренного по меньшей мере одним датчиком.
14. Крепежный элемент по п. 12 или 13, отличающийся тем, что он выполнен с возможностью остановки содержащей его системы в ответ на показания указанных датчиков.
15. Крепежный элемент по п. 12 или 13, отличающийся тем, что он выполнен с возможностью на основании показаний датчика определить вес захваченного объекта.
| US 5116190 A1, 26.05.1992 | |||
| US 7327112 B1, 05.02.2008 | |||
| Способ интраоперационной диагностики жизнеспособности тканей | 1986 |
|
SU1466704A1 |
| @ -Координатный пространственный механизм (его варианты) | 1984 |
|
SU1222538A1 |

