Изобретение относится к области самомонтажа и самодемонтажа манипулятора, используемого при взрыво- или пожароопасных условиях работы данного и другого горно-шахтного оборудования.
Известно подъемное устройство-приспособление для монтажа подъемного башенного крана методом подращивания снизу (прототип), о котором указано в заявке к SU №1569220, которое опубликовано в бюллетене №22 от 1990 г. № заявки 4390481/11 (024101) по классу М, кл. 4 B25J 3/02, В66С 23/14.
Ориентировочно там применен четырехкратный полиспаст для подъема башни и наращивания (выдвижения телескопического) с помощью гибкой связи, т.е. канатного полиспаста. В данном конструкторском решении применяется параллельное свойство перемещения каната без скрещивания ветвей канатного полиспаста, где конструкция может быть поднята до соприкосновения блоков. Конструкция обладает высоким кпд.
Недостатком данной конструкции является то, что она не может быть применена без опоры на башню, - это во первых, а во вторых - при этом не может уравновесить некоторую несбалансированную часть веса поднимаемой конструкции, если не опираться на направляющую часть башни, которая предохраняет от опрокидывания и падения выдвигаемую часть башни. В данной конструкции не хватает уравновешивающего каната. Известная строительная люлька, которая используется при строительстве и ремонте зданий. Она приводится в действие двумя электродвигателями через редукторы и полиспасты (двухкратные), имеющие уравновешивающие канаты (два).
«Строительные краны и грузоподъемные механизмы. Справочник», глава 12. Строительные автомобильные подъемные вышки, стр. 622-623, раздел 12.1.32.
Фасадный подъемник (строительная люлька) одноместный 3449Б, (двухместный 3851Б) (рис. 12.28) серия «Строительство» А.Д.Кирнев, Г.В. Несветаев, Ростов-на-Дону, Феникс, 2013 год издания (1), грузоподъемностью 120(300/500) кг, высотой до 150 м, скорость подъема 9,1 (9,1/5,5) м/мин, мощностью 0,75(1,5) кВт, масса полная 585(931/961/1061) кг.
Недостатком данной конструкции является тот факт, что в нашем случае лучшее действие от мускульной силы человека, а не от электроэнергии, и здесь недостаточной кратности полиспаст. И еще - уравновешивающие канаты не могут иметь разное натяжение ветвей, так как подвешены не к углам люльки, а к середине краев меньших сторон и их ветвей явно не хватает. В предлагаемой кинематической схеме ветвей восемь у уравновешивающего каната.
Целью настоящего изобретения является увеличение надежности действия полиспаста подъемного каната, увеличение надежности подъема манипулятора и уравновешивания некоторой остаточной несбалансированной части веса манипулятора.
Указанная цель достигается тем, что в известном подъемном устройстве, включающем червячную самотормозящую лебедку, преимущественно действующую от мускульной силы человека, подъемный канат с девятикратным полиспастом, или более того, который подвешивают как можно ближе к центру тяжести устройства, которое состоит из собственно устройства и манипулятора, который требуется поднять к монорельсу у кровли горной выработки и закрепить на последнем, девятикратный полиспаст выполняют с блоками, а с целью уравновешивания некоторой остаточной несбалансированной части веса манипулятора к его четырем угловым точкам подвеса закрепляют уравновешивающий канат, который представляет собой бесконечный канат, закрепленный за восходящие ветви к манипулятору, блоки которого закрепляют штанговыми крепями к почве и кровле горной выработки, причем вертикальные ветви уравновешивающего и подъемного канатов строго параллельны, иначе - лебедка не потянет. Таким образом, в уравновешивающем канате создается разное натяжение последнего в ветвях каната как в восходящих ветвях, так и в нисходящих.
Для того чтобы обеспечить надежную и безаварийную работу подъемного устройства, необходимо проверить, выдержат ли штанговые крепи вес манипулятора, для этого нужно подвесить нагрузку, равную весу манипулятора, к каждой штанговой крепи и, только убедившись в неразрушаемости крепи нагруженным весом, таким же как манипулятор, можно собирать подъемное устройство. Если же одна штанговая крепь не выдерживает, - можно применить две или три штанговые крепи.
Если что-то не будет получаться, то можно использовать подобную схему-кинематику. Но эта кинематическая схема применима для уравновешивающего каната, и отличается только отсутствием направляющих в виде башни в предлагаемом изобретении.
Одним из признаков изобретения является наличие самотормозящей червячной лебедки, действующей от мускульной силы человека. Это встречается в строительных люльках для спуска люльки с верхних этажей на нижние.
Другим признаком изобретения является наличие двух канатов, выполняющих разные функции: один для подъема, другой для уравновешивания разницы веса, приходящегося на одну ветвь каната относительно другой ветви, или группы ветвей. Этот признак встречается в экскаваторе ЭВГ-6 (ЭВГ-6 Н.Г. Домбровский. «Экскаваторы», издательство «Машиностроение», М., 1969.
УДК 621.879
3-2-7/176-68. Стр. 119, таблица 27 ЭВГ-6, первая колонка
Стр. 118 & 5 Экскаваторы вскрышные большой мощности к стр. 3),
но с тем отличием, что в той конструкции нет отдельно уравновешивающего и подъемного канатов, а функцию уравновешивания нагрузки на один зуб ковша берет на себя натяжение подъемного каната больше или меньше один из подъемных канатов, левый или правый, в зависимости от того, на какой зуб больше нагрузка.
Следующим признаком изобретения является тот факт, что подъемный канат имеет один полиспаст, но ветви каната параллельны и не скрещиваются. Этот признак применен в башенном подъемном кране с подращиванием снизу (прототип). SU 1569220.
Следующим признаком изобретения является наличие двух канатов, которые используются для разных целей: подъема и уравновешивания. Этот признак не встречается нигде на дату заявки. Хотя встречается похоже в горно-шахтных подъемных машинах, в стволах шахт. Но отличие в том, что в предлагаемом изобретении они крепятся к разным точкам конструкции: к углам.
Следующим признаком изобретения является отсутствие направляющих, например таких, как башня у башенного крана, или проводники у горношахтных подъемных машин. Этот признак встречается в строительных люльках или в космических кораблях.
Следующим признаком изобретения является наличие ветвей полиспаста, выстроенных в виде шахматной доски, состоящей из блоков полиспастов крайних - одних и других. Этот признак лишь отчасти встречается в конструкциях лифтов и возможно лифтов космических кораблей. Но отличается тем, что там блоков четыре плюс четыре с одной стороны, и четыре - с другой. Следующим признаком изобретения является применение для подъема груза (манипулятора) ручной самотормозящей червячной лебедки, работающей от мускульной силы рабочего, имеющей большой запас канатоемкости. Этот признак встречается в механизме наведения артиллерийских орудий, правда без каната, - тем более с большим запасом канатоемкости.
Следующим признаком изобретения является наличие двух или более клеток блоков полиспаста, которые применены для того, чтобы уменьшить непараллельность ветвей полиспаста или скрещивание ветвей полиспаста с тем, чтобы уменьшить недоподъем манипулятора за счет того, что канатоподъемность будет надежнее обеспечена тогда, когда канатные ветви строго параллельны, а не скрещиваются, т.к. чем больше угол скрещивания, тем ненадежнее подъем в конце стадии подъема, т.е. недовод манипулятора, - другими словами.
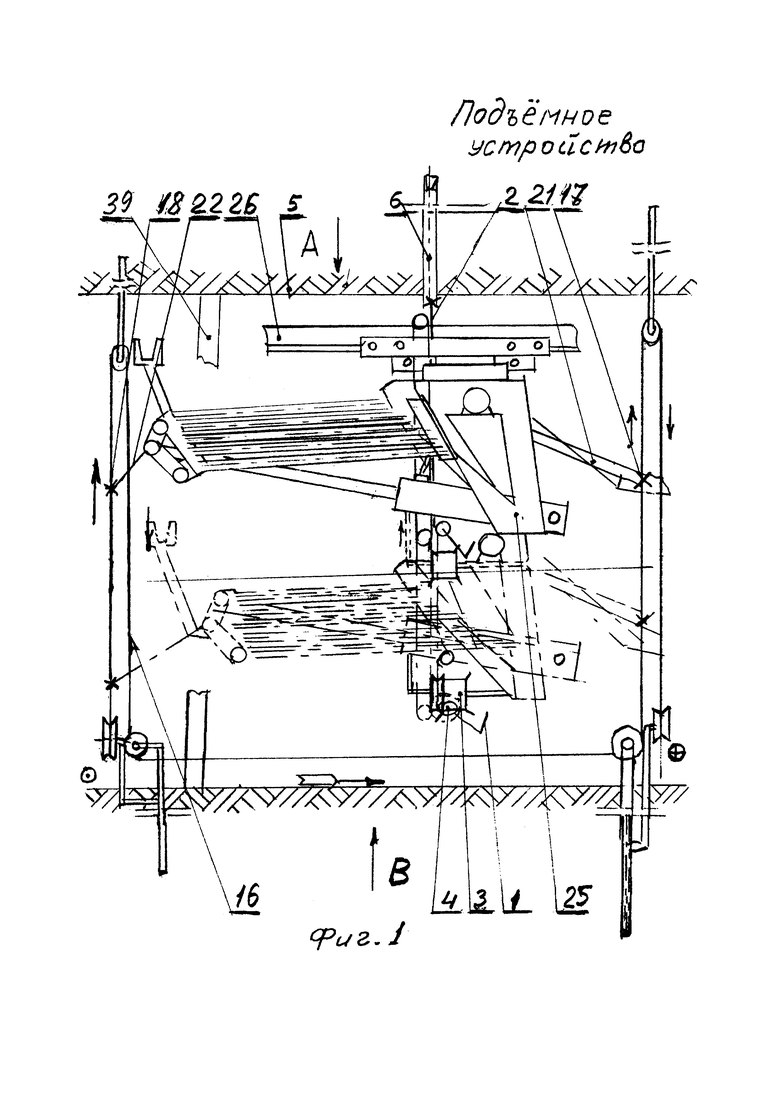
На фиг. 1 изображена фронтальная проекция подъемного устройства.
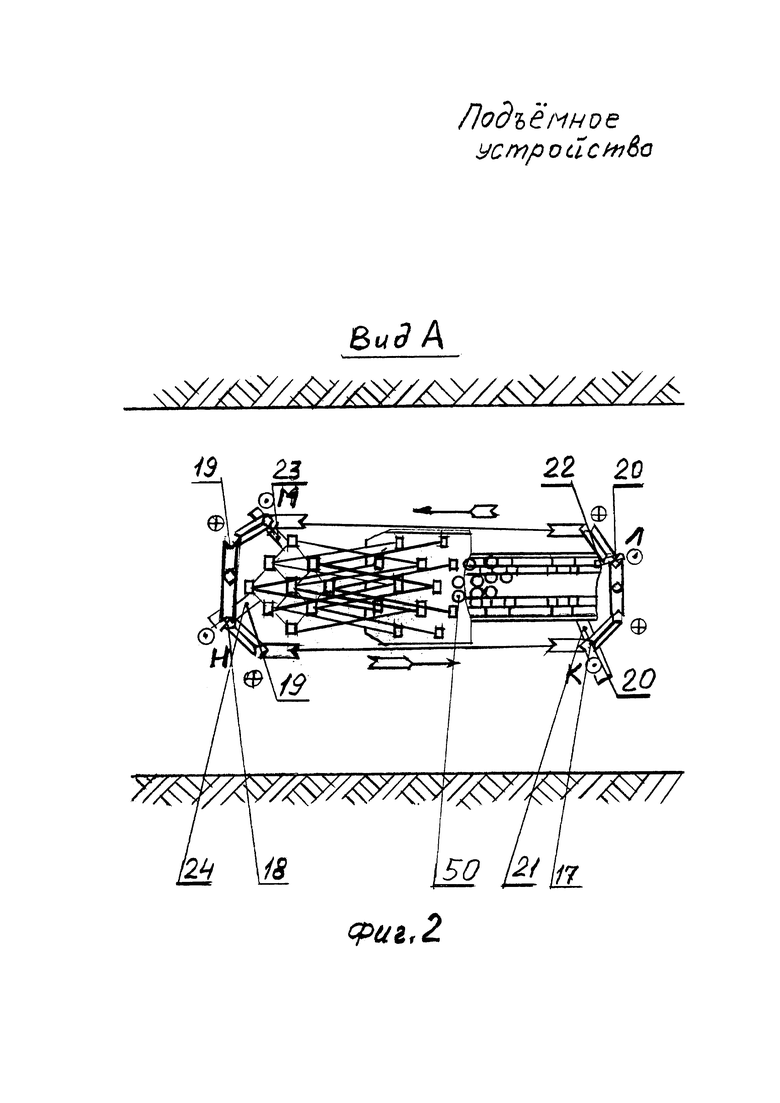
На фиг. 2 изображен Вид А на фиг. 1.
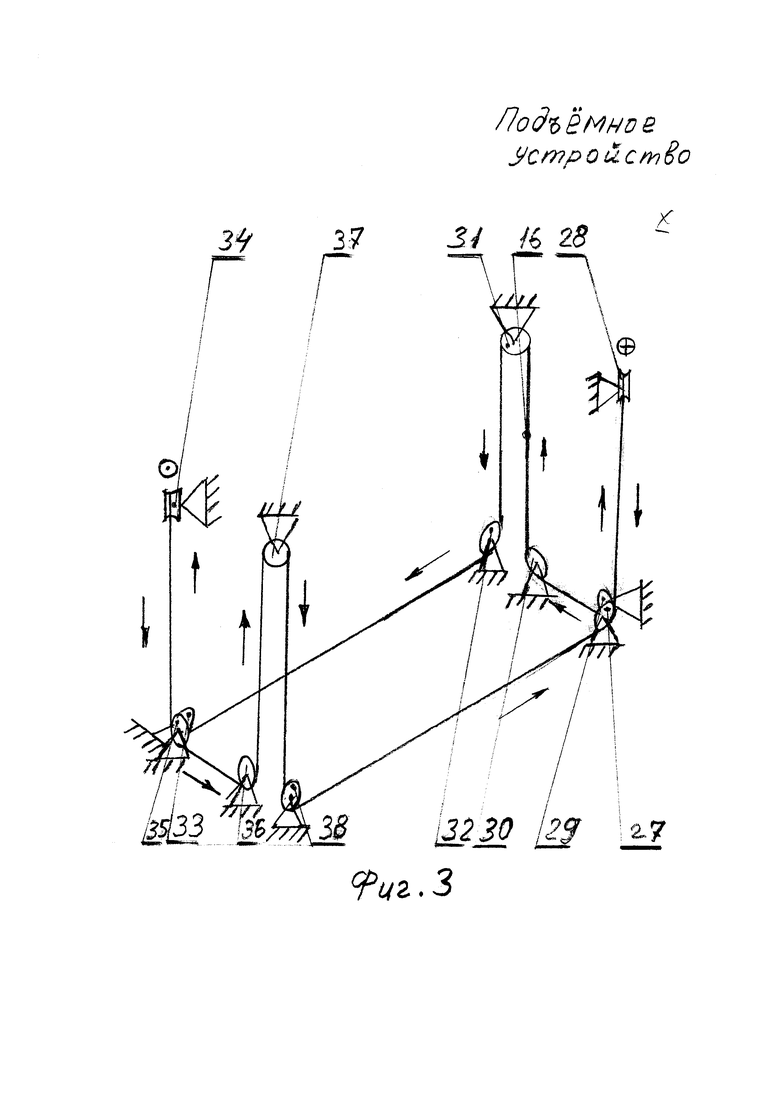
На фиг. 3 изображена изометрия подъемного устройства (уравновешивающего каната), (кинематическая схема в изометрической проекции).
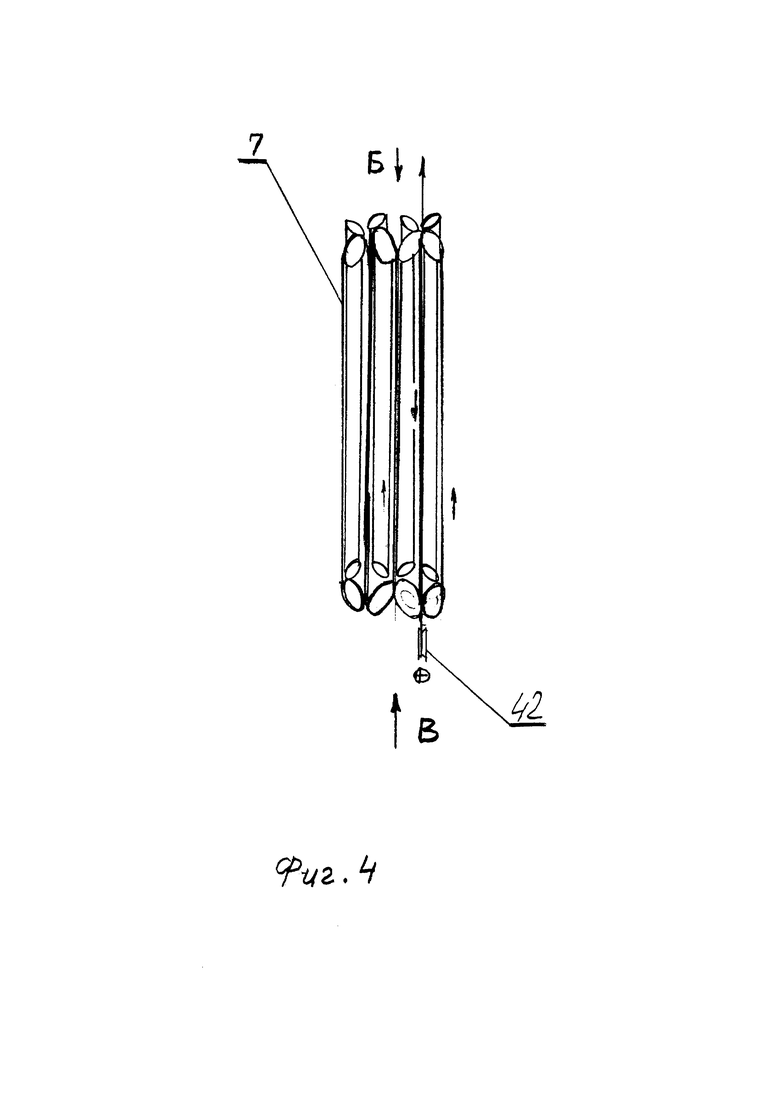
На фиг. 4 изображена изометрия подъемного устройства (подъемного каната), (кинематическая схема в изометрической проекции).
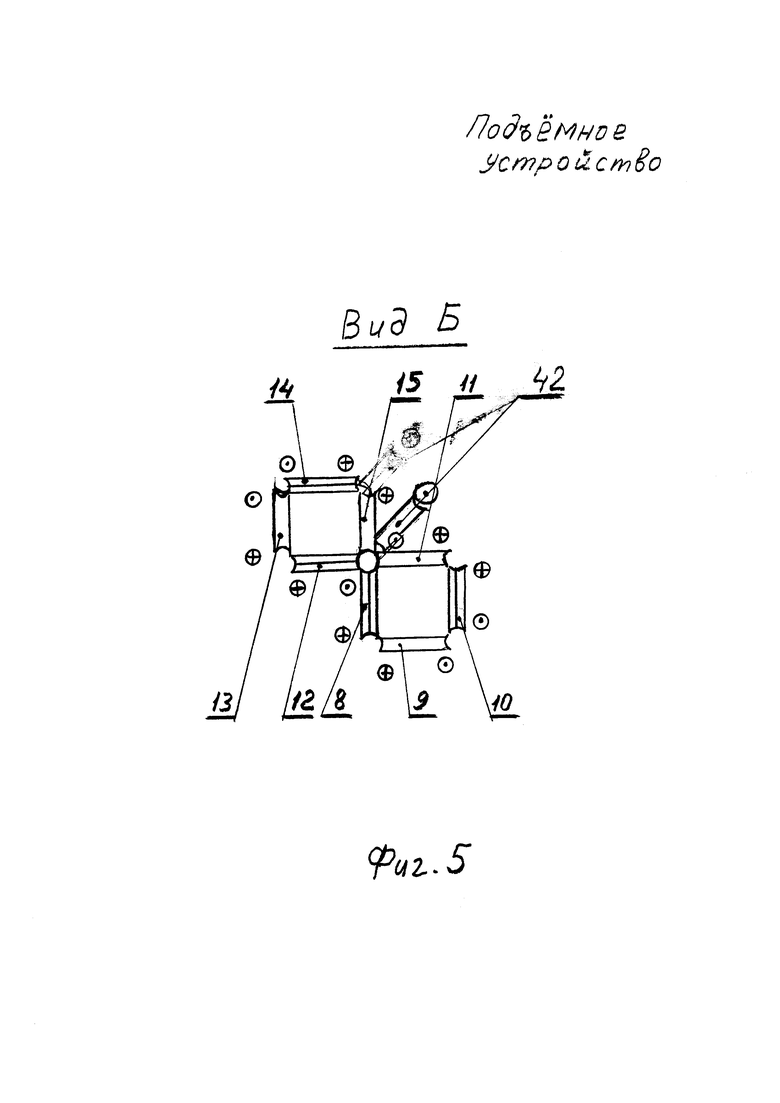
На фиг. 5 изображен Вид Б на фиг. 4, кинематическая схема действия подъемного устройства и полиспаста, и подъемного каната.
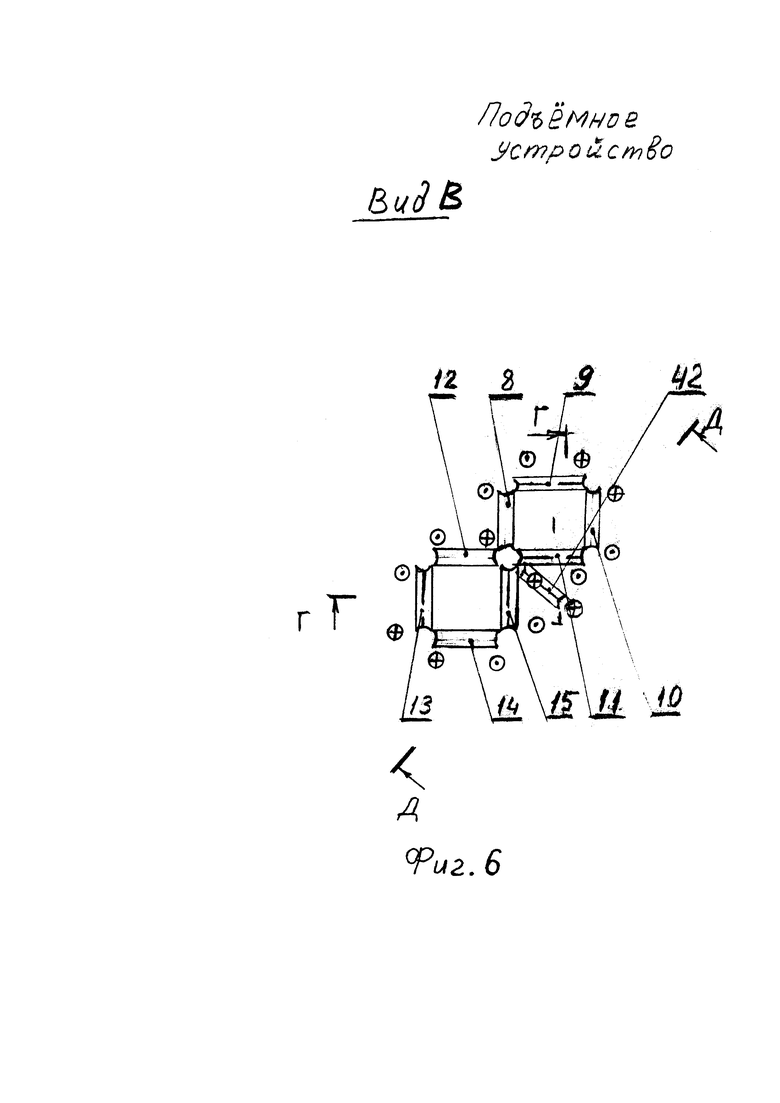
На фиг. 6 изображен Вид В на фиг. 1 или на фиг. 4, вид подъемного устройства
(подъемного каната) снизу.
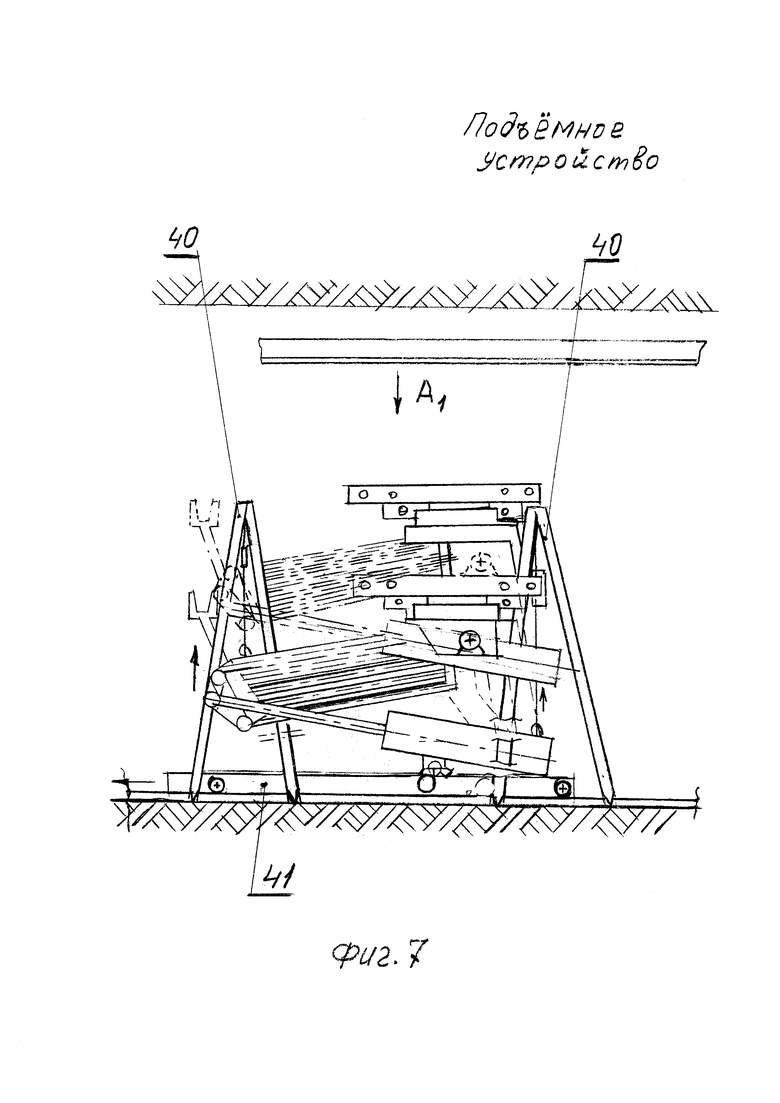
На фиг. 7 изображена фронтальная проекция подъемного устройства манипулятора, поднимаемого талями, и подвижная тележка, подвозящая манипулятор и тали.
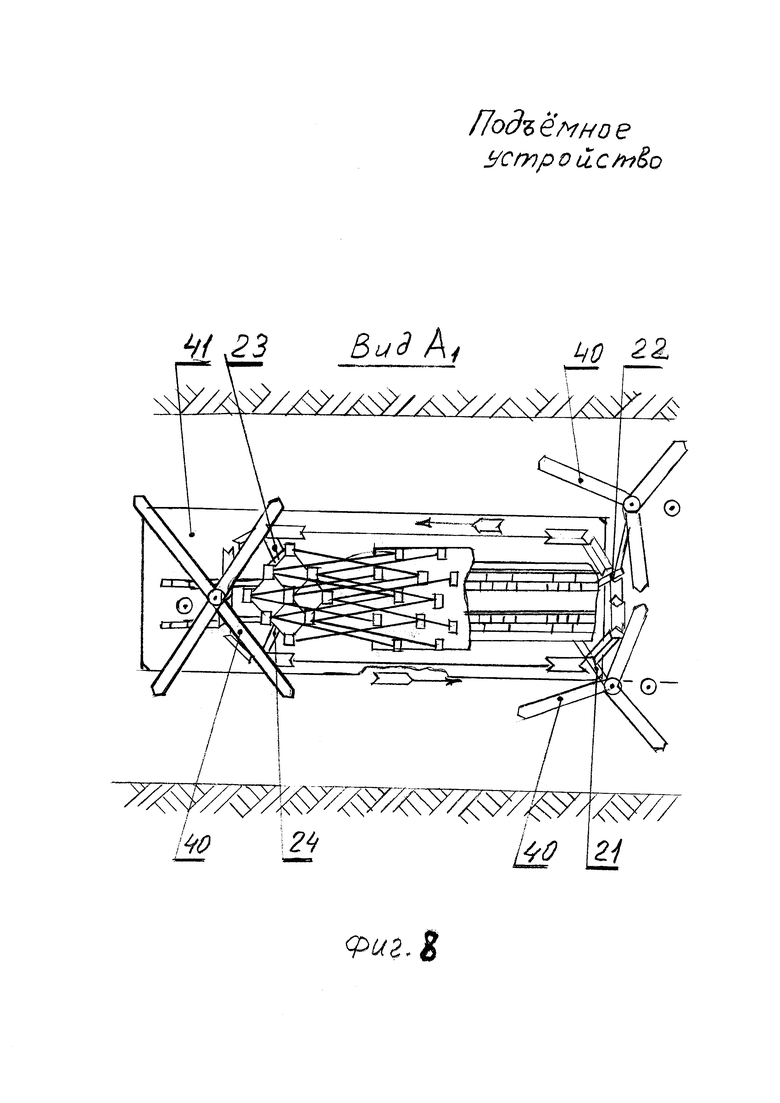
На фиг. 8 изображен вид А1 на фиг. 7, вид сверху на тали, и манипулятор, поднимаемый талями.
На фиг. 9 изображена изометрия горной выработки, крепления ее, монорельсовой дороги.
На фиг. 10 изображено устройство крепления блоков на осях полиспаста. Разрез Г-Г на фиг. 6
На фиг. 11 изображен разрез Д-Д на фиг. 10 и девятая ветвь полиспаста.
Подъемное устройство состоит из рукояти червячной лебедки 1, подъемного каната 2, барабана 3, червячной лебедки 4, кровли горной выработки 5, штанговой крепи 6, девятикратного полиспаста 7 и блоков равного диаметра 8, 9, 10, 11, 12, 13, 14, 15, 42, уравновешивающего каната 16, точек подвеса манипулятора 17, 18, 19, 20, кронштейнов подвеса 21, 22, 23, 24, манипулятора 25, монорельса 26, блоков 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, шарикоподшипников 43, пружинных стопорных колец 44, опорных осей 45, втулок 46, 47, хомутов 48 и оси 49.
Перед началом работы уравновешивающий канат 16 проводят согласно кинематической схеме через блоки 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, фиг. 1, фиг. 2, фиг. 3, и закрепляют концы друг с другом, делая канат бесконечным, - замкнутым, при этом его нужно натянуть. Далее перед началом работы подъемный канат протягивают через блоки 8, 9, 10, 11, 12, 13, 14, 15 и 42 согласно кинематической схеме (два) фиг. 4, фиг. 5 и фиг. 6, закрепляют крайние блоки и концевой конец каната к штанговым крепям 6 к кровле горной выработки 5 или к кронштейнам 2, прикрепленным к тюбинговой арочной крепи 39.
Перед работой подъемного устройства его нужно привести в соответствующее состояние. Для этого манипулятор 25, который поднимается устройством, необходимо поднять с помощью тали 40, над тележкой 41, не показанной на фигурах, на которой манипулятор привезли, затем закрепить кронштейны 21, 22, 23, 24 к манипулятору, с помощью которых манипулятор крепят к уравновешивающему канату 16.
Далее протянуть уравновешивающий канат 16 через блоки 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38 последовательно, фиг. 3, и снова замкнуть его (канат) между блоками 27 и 38, фиг. 3, фиг. 1.
Далее протянуть подъемный канат 2 от барабана 3 через блоки последовательно 8, 9, 10, 11, 12, 13, 14, 15 и 42 и закрепить его на монорельсе 26 или за специальную штанговую крепь 6 у кровли горной выработки 5, которую нужно предварительно пробурить и закрепить и оставить на ней специальный крюк для крепления подъемного каната. А для подвешивания манипулятора талью у последнего должны быть предусмотрены болты или проушины, аналогичные, как у емкости для раствора на стройке.
Канат уравновешивающий - должен быть натянут для того, чтобы он не слетал с блоков. Канат подъемный должен обладать девятикратным полиспастом, который существенно проходит через блоки, установленные в квадрат, фиг. 4, фиг. 5, фиг. 6.
Подъемное устройство работает следующим образом: вращают рукоять лебедки червячной 1, наматывают канат 2 на барабан 3 лебедки 4, сокращая канат до подвеса последнего к кровле 5 горной выработки с помощью штанговой крепи 6 и применения девятикратного или более полиспаста 7 и соответствующего числа блоков 8, 9, 10, 11, 12, 13, 14, 15, 42. Таким образом червячная лебедка 4 создает тягу манипулятора к кровле горной выработки 5, а уравновешивающий канат 16 служит для создания разности сил при их неравенстве на точках подвеса манипулятора 17, 18, 19, 20, см. фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 8, фиг. 10 и фиг. 11.
Средства и методы, с помощью которых возможно осуществление изобретения, изображены на фиг. 10, 11, включая девятый блок полиспаста, позиция 42 на фиг. 4, фиг. 5, фиг. 6, фиг. 11, этот блок огибает крайнюю ветвь последнего блока полиспаста. Оси блоков полиспаста соединены хомутами 48 с болтами - с кронштейнами рамы манипулятора. Блоки сидят на шарикоподшипниках 43, дистанционные втулки 46, 47 также сидят на шарикоподшипниках 43, последний девятый блок сидит на оси 49, фиг. 11, блок 42. Блок 42 сидит на шарикоподшипниках 43. Блоки или стаканы крепятся на оси с помощью пружинных стопорных колец 44.
Для вертикальных ветвей подъемного каната в раме манипулятора проделаны окна 50, фиг. 2. Помимо того, что ветви канатов подъемного и уравновешивающего должны быть параллельны, они должны быть вертикальны, - и строго, иначе лебедка не потянет.
А те ветви, которые на чертежах строго горизонтальны, должны быть на практике строго горизонтальны, иначе лебедка не потянет.
Ветви уравновешивающего каната и ветви подъемного каната должны быть строго параллельны, имеется ввиду их вертикальные ветви, иначе лебедка не потянет.
Уравновешивающий канат работает следующим образом: если один угол манипулятора окажется легче трех других и кронштейн его станет подниматься, как бы опережая три других кронштейна, но ветвь уравновешивающего каната, которая непременно следует за данным опережающим кронштейном, обязательно потянет и отстающие кронштейны, так как она не деформируется под нагрузкой, а будет испытывать только большую нагрузку или большее натяжение внутри данной системы ветвей. Если же какой-то из углов окажется с большей нагрузкой, то и подавно предыдущая ветвь каната воспримет большее натяжение и потянет за собой кронштейн с углом манипулятора, несмотря на большую нагрузку; просто натяжение каната будет неодинаковое и все. Важно лишь то, чтобы крепление каната к кронштейну выдержало бы нагрузку. Если же две смежные ветви каната уравновешивающего окажутся одинаково меньше нагружены кронштейнами от манипулятора, то тогда ветви каната за этими кронштейнами будут нагружены сильнее, и подъемный канат не будет перегружен или даже не создаст перекос устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2010 |
|
RU2457936C2 |
| ВЕРТОЛЕТНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2519182C2 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| БАШЕННЫЙ КРАН | 1966 |
|
SU179445A1 |
| АВТОПОДЪЕМНИК | 1994 |
|
RU2097306C1 |
| Устройство для очистки вертикальных поверхностей | 1990 |
|
SU1791593A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1997 |
|
RU2148551C1 |
| Устройство для обслуживания антеннойчАСТи РАдиОТЕлЕВизиОННОй бАшНи | 1978 |
|
SU815222A1 |
| БАШЕННЫЙ КРАН ДЛЯ СТРОИТЕЛЬСТВА ЗДАНИЙ ПОВЫШЕННОЙ ЭТАЖНОСТИ | 1967 |
|
SU206043A1 |
| Монорельсовая подвесная установка | 1983 |
|
SU1157268A1 |
Изобретение относится к области пожаро- или взрывоопасных условий работы горно-шахтного оборудования и служит для самомонтажа и самодемонтажа манипулятора. Подъемное устройство включает ручную лебедку, преимущественно действующую от мускульной силы человека, полиспаст и манипулятор, который требуется поднять к монорельсу у кровли горной выработки и закрепить на последнем. К четырем угловым точкам подвеса манипулятора закрепляются восходящие ветви уравновешивающего каната, который выполнен бесконечным. Блоки уравновешивающего каната выполнены с возможностью крепления штанговыми крепями к почве и кровле горной выработки, причем вертикальные ветви уравновешивающего и подъемного канатов строго параллельны. Изобретение обеспечивает повышение надежности устройства. 11 ил.
Подъемное устройство, включающее червячную лебедку, преимущественно действующую от мускульной силы человека, полиспаст и манипулятор, который требуется поднять к монорельсу у кровли горной выработки и закрепить на последнем, при этом к четырем угловым точкам подвеса манипулятора закрепляются восходящие ветви уравновешивающего каната, который выполнен бесконечным, блоки уравновешивающего каната выполнены с возможностью крепления штанговыми крепями к почве и кровле горной выработки, причем вертикальные ветви уравновешивающего и подъемного канатов строго параллельны.
| 0 |
|
SU87154A1 | |
| Устройство для подъема грузов | 1974 |
|
SU499219A1 |
| Манипулятор | 1988 |
|
SU1569220A1 |
| СУДОВОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1991 |
|
RU2013301C1 |
| Подъемно-тяговая система | 1979 |
|
SU787347A1 |

