Изобретение относится к подъемным устройствам, а также к демонтажным устройствам, то есть к спускающим устройствам. Известен манипулятор - подъемный кран - подвесной крепеукладчик (см. авторское свидетельство СССР №367257 по классу Е-21 13/04 03.08.70 г., опублик. в Бюллетене изобретений СССР за 1973 г. и описанное в Горном журнале №6 за 1975 г. стр.33-34, разработанный институтом и изготовленный опытным заводом НИПИГОРМАШ в городе Свердловске под номером В.53.000 от 28.06.78 г., 24.12.78 г., 25.12.75 г., с пультом под номером В53.670 от 19.06.78 г, утвержденные 30.12.75 г. Первухиным П.И.) со стрелой, выполненной из Н-И-образного профиля звена плюс стержневых звеньев, с захватами, приводом, работающим от энергии сжатого воздуха, тягового каната, наматываемого на барабан механической лебедки с планетарным редуктором с пневмодвигателем ДАР - 5. Планетарныцй редуктор схемы 2 К-Н, с тяговым усилием на канате 400 кг. Стрела снабжена трехкратным полиспастом. Стрела, звенья которой шарнирно закреплены на раме и в совокупности со вспомогательными звеньями и рамой образуют в проекции на вертикальную плоскость шарнирный параллелограмм, привод для подъема стрелы. Стрела выполнена из звеньев в виде шарнирной призмы, основания которой равнобедренные трапеции. Одно основание представляет собой часть рамы и шарнирно соединено со звеньями стрелы, образующими ребра призмы. Другое основание сложной формы, состоящей из элемента, связывающего шарниры в равнобедренную трапецию, без сторон, таким образом, что соединяют шарниры и являются высотами трапеций. Недостатком данной конструкции стрелы являются большие потери силы в подшипниках скольжения опор звеньев, как в вершинных опорах, так и в коренных опорах рамы, за счет перекосов в опорах, которые приводят к зазорам-натягам, переменным по величине, как смотря по радиусу от центра осей до перифирии радиуса, так и смотря от одного торца опор звеньев до другого. Чем больше по числу опор, тем больше трение, но не всегда так как за счет обеспечения ровных зазоров, причем без натягов и других напряжений сил, трение резко уменьшается и резко увеличивается КПД. Недостатком данной конструкции стрелы является ненадежность. Кроме того, недостатком данной конструкции является небольшая скорость подъема груза из-за полиспаста, примененного в конструкции и большого передаточного числа механического редуктора (планетарного). Достоинством является простота стрелы.
Примером высокого КПД является гидравлический экскаватор с приводом от дизеля-гидронасооса-гидроцилиндра, но использовать дизель в нашем случае не представляется возможным из-за пожароопасной среды. Новым в заявленном изобретении является конструкция стрелы. Применение данной конструкции не ограничивается областью техники для пожароопасных шахт или угольных карьеров.
Но для данных условий работы она является наиболее эффективной, так как относительный параметр вес плюс мощность оптимален. Например, для электропривода двигатель очень тяжелый, так как он выполняется взрывобезопасным, то есть с толстой стенкой корпуса, с литой крышкой и корпусом, с герметичным исполнением, с толстыми шпильками, чтобы взрыв внутри корпуса электродвигателя не смог бы разорвать корпус электродвигателя и стягивающие шпильки или разгерметизировать его, да еще с пускателем во взрывобезопасном исполнении с толстым корпусом, толстой крышкой, с герметичным исполнением. Кроме того, на почве есть вода, которая имеет свойство течь, и она агрессивная. Она может своими испарениями замкнуть электродвигатель, вызвать взрыв. Вода просачивается по деревянным стойкам крепи горных выработок. В шахте с вентиляцией очень сложно, поэтому загазованность от дизеля говорит о том, что применение его ничего хорошего не принесет. Кроме того, дизель больше весит.
Применение дизеля при выбросах метана в шахте или наличии угольной пыли тоже проблематично, малейшая искра - и взрыв или пожар.
Известно, что манипулятор, который применяется в башенном подъемном кране для монтажа и демонтажа секций башни методом подращивания снизу, то есть для подъема поворота и ввода подращиваемой секции башни в проем башни и так далее или (и) для демонтажа последней, - после окончания действия крана - в обратном порядке, относительно монтажа, то есть для вывода, опускания и поворота вниз секции башни крана.
В связи с вышеизложенным манипулятор предлагаемого изобретения может быть применен для демонтажа конструкций, например для опускания трубопроводов под воду при строительстве газопроводов или нефтепроводов по дну моря, не используя захваты, а используя канат и стрелу с блоками и полиспастами и используя несколько стрел - параллельно.
Одним из признаков изобретения является использование в качестве привода гидроцилиндра. Этот признак является часто встречающимся в экскаваторах. Одним из признаков изобретения является наличие звеньев, таких как рамы и привод-гидроцилиндр. Этот признак встречается в экскаваторах.
Известен манипулятор по а.с. 1569220 (прототип), включающий стрелу выполненную из звеньев V-образного профиля (трубчато-стержневого) сечения. Стрела имеет дополнительное звено, и крепится с возможностью поворота к раме, и привод. Стрела включает вспомогательные звенья и захваты. Звенья препятствуют движению относительно друг друга в двух взаимно-противоположных направлениях, обеспечивающих равномерность зазоров, высокий КПД. Недостатком стрелы является недостаточная надежность. Стрела - универсальная конструкция, она может быть использована и для подъема груза, и для опускания груза, и в роторных экскаваторах, и в ковшовых машинах с разъемным ковшом от гидроцилиндров с раздельным высыпанием грунта на транспорт или в кучу, и в подъемных кранах, причем с различными приводами, и в портальных кранах, и в портах и в горно-добывающих карьерах, и при строительстве метро, и для бурильных машин.
Целью предлагаемого изобретения является повышение прочности и надежности стрелы в статике и в работе, а также повышение КПД.
Указанная цель достигается тем, что в известном манипуляторе по а.с. №1569220 принимается за основу две стрелы, по а.с. №1569220 соединяют их общей осью расходящиеся дополнительные звенья к вершине стрелы, закрепляют шарнирно к раме еще два крайних звена, соединяют их вершины с помощью вспомогательных звеньев со средними звеньями параллельно последним (средним) и скрещивающимися с дополнительными звеньями стрел известного манипулятора и применяют для привода гидроцилиндр. Известно, в конструкции манипулятора применено а.с. №1569220 одно дополнительное звено, в отличие от предполагаемого изобретения, где применено два дополнительных звена.
Вторым признаком изобретения является наличие четырех средних звеньев, примененных между крайними и дополнительными звеньями, по два на середину. Этот признак отсутствует в технических решениях на дату заявки. Одним из признаков, влияющих на положительный эффект, является наличие скрещивающихся стержней V-образного профиля, например дополнительных звеньев и средних звеньев. Этот признак известен из а.с. №1569220, но там три звена со скрещивающимися стержнями, а в предлагаемом изобретении их восемь, то есть шесть и два. Шесть параллельных и два скрещивающихся относительно первых шести.
Следующим признаком изобретения является наличие двенадцати вспомогательных звеньев, образующих вершину стрелы.
В а.с. №1569220 вспомогательных звеньев четыре, и они аналогично образуют вершину стрелы.
Одним из признаков, влияющим на достижение положительных эффектов: на прочность, надежность и высокий КПД является то, что при горизонтальных нагрузках зазоры выберутся в общем шарнире, соединяющем оба дополнительных звена при вершине стрелы. И это дает дополнительную прочность, надежность и высокий КПД при горизонтальных нагрузках за счет того, что вертикальные поворотные нагрузки, воспринимаются через выбранные зазоры левых и правых шарниров дополнительных звеньев через вспомогательные звенья, соединяющие средние звенья и дополнительные звенья, и так далее через вспомогательные звенья и крайние звенья.
Следующим признаком является наличие осей с профилем шестигранника с надетой втулкой с шестигранным отверствием в бронзовой втулке. Этот признак не известен на дату заявки, в том смысле, что ось из стали работает на сложно-напряженное состояние, а бронзовая втулка - на трение скольжения.
Очередным признаком изобретения является тот факт, что шарниры стрелы единожды поворотные. Конструкция стрелы, сделанная из жестких треугольников, силовых и скрещивающихся, позволяет экономить вес на стреле, несмотря на тот факт, что элементов в стреле больше и шарниров больше, а экономя вес, экономим и КПД, т.е. имеем высокий КПД.
Стрела данной конструкции выдержит нагрузки на порядок большие, чем, например, по а.с. №1569220, а по отношению к первому аналогу - на два порядка. По отношению к а.с. №1569220 конструкция шарниров сделана проще, а не лучше, но имеет смысл шарниры сделать с башмаками и с держателями осей по "Справочнику ГипроУглемаша".
Следующим признаком изобретения является наличие поворотных кругов - горизонтальных-соосных, и башмпаков для крепления к монорельсу, плюс червячная лебедка для притягивания канатом к кровле горной выработки манипулятора, поворота его в осях поворотных кругов, причем соосных. Этот признак заменяет таль, или разборку (демонтаж), или домкрат. Следующим признаком изобретения является наличие и привинчивание к углам манипулятора четырех червячных лебедок, которые используют для подъема и монтажа манипулятора на монорельсе, причем канаты червячных лебедок должны быть строго параллельны, то есть непараллельность должна быть в пределах 1%, иначе они не потянут.
Следующим признаком изобретения является крепление канатов к кровле выработки с применением штанговой крепи. Очередным признаком изобретения является то, что параллельность канатов может быть достигнута с помощью отклоняющих блоков большого диаметра (примерно 200 диаметров каната) и крепления канатов с помощью кронштейнов к монорельсу, без штанговой крепи. Следующим признаком изобретения является то, что поднять и собрать манипулятор можно одним канатом, но ветви каната восходящие и нисходящие должны быть параллельны, что может быть осуществлено с помощью отклоняющих блоков, а крепление углов манипулятора к канату может быть осуществлено болтами с хомутами. Этот признак имеет место быть в башенном кране с подращиванием снизу, за исключением крепления углов манипулятора. Следующим признаком изобретения (новизны) является наличие двух взаимно связанных стрел по а.с. №1569220. Этот признак не встречается нигде на дату заявки. Эти стрелы связаны между собой двумя крайними звеньями V-образного профиля с помощью вспомогательных звеньев, образующих жесткие силовые треугольники с вершинами средних звеньев новой стрелы и одновременно являющимися крайними звеньями стрел по а.с. №1569220 и скрещивающимися с дополнительными звеньями стрел по а.с. №1569220, а также связаны общей осью - пальцем дополнительных звеньев у вершины стрелы. Этот признак не встречается нигде на дату заявки. Очередным признаком изобретения является наличие звеньев в количестве двадцати четырех, включая два крайних, четырех средних, два дополнительных, два наружных, двенадцать вспомогательных, плюс цилиндр и рама. 2+4+2+2+12+1+1=24. Этот признак не встречается нигде на дату заявки.
Таким образом, предлагаемое изобретение отвечает требованию "Новизна" и "Положительный эффект".
На дату подачи заявки признаков отличительных от прототипа в известных технических решениях не обнаружено, т.е. предлагаемое техническое решение обладает существенными отличиями.
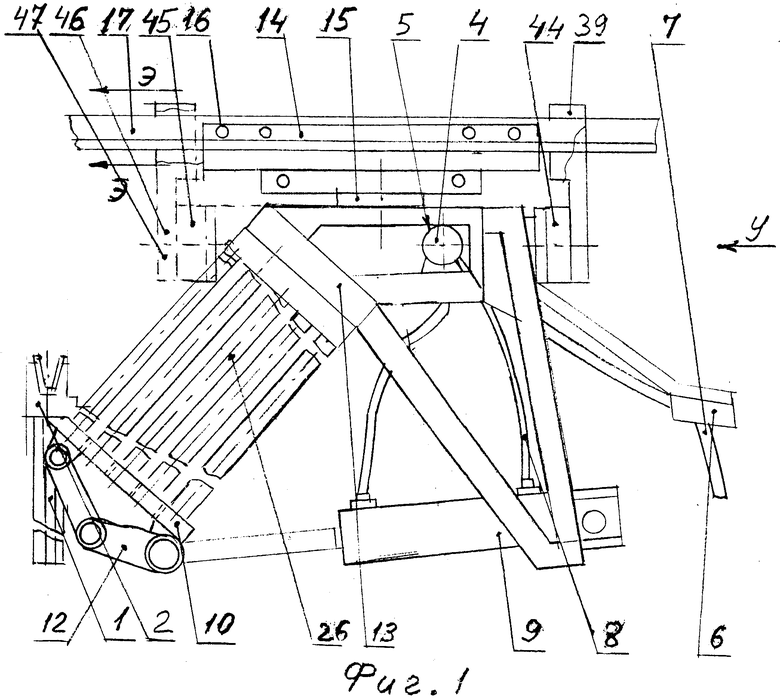
На фиг.1 изображена фронтальная проекция манипулятора.
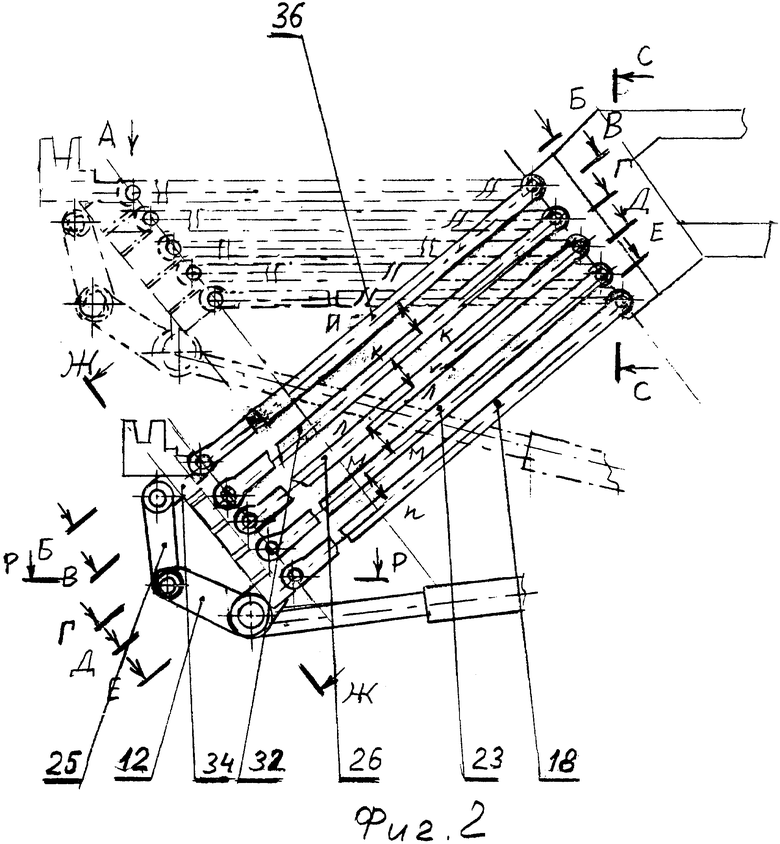
На фиг.2 изображена фронтальная проекция стрелы манипулятора.
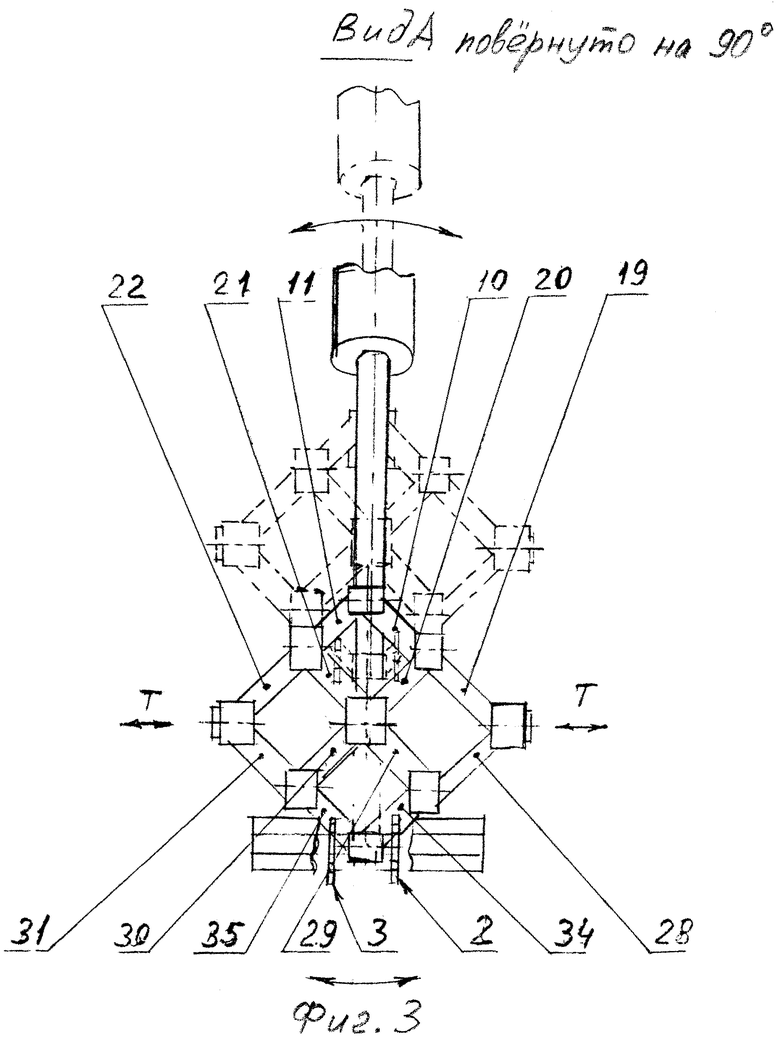
На фиг.3 изображен вид А на фиг.2.
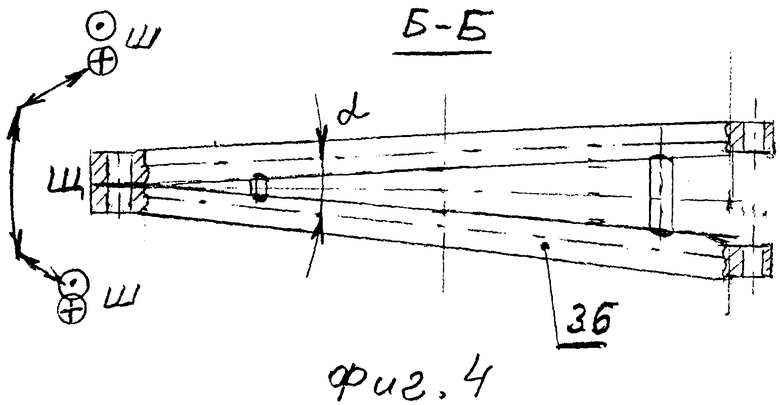
На фиг.4 изображен разрез Б-Б на фиг.2.
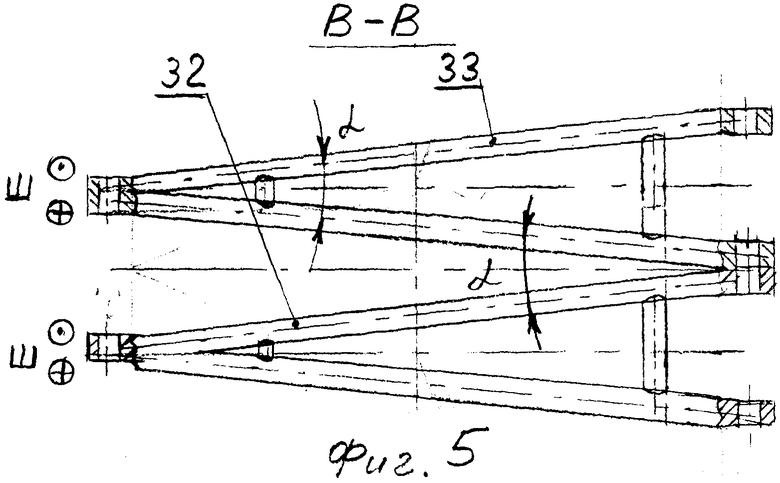
На фиг.5 изображен разрез В-В.
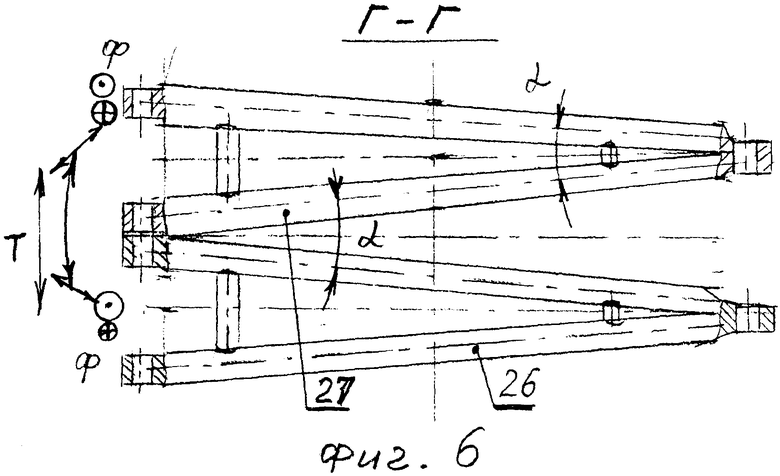
На фиг.6 изображен разрез Г-Г.
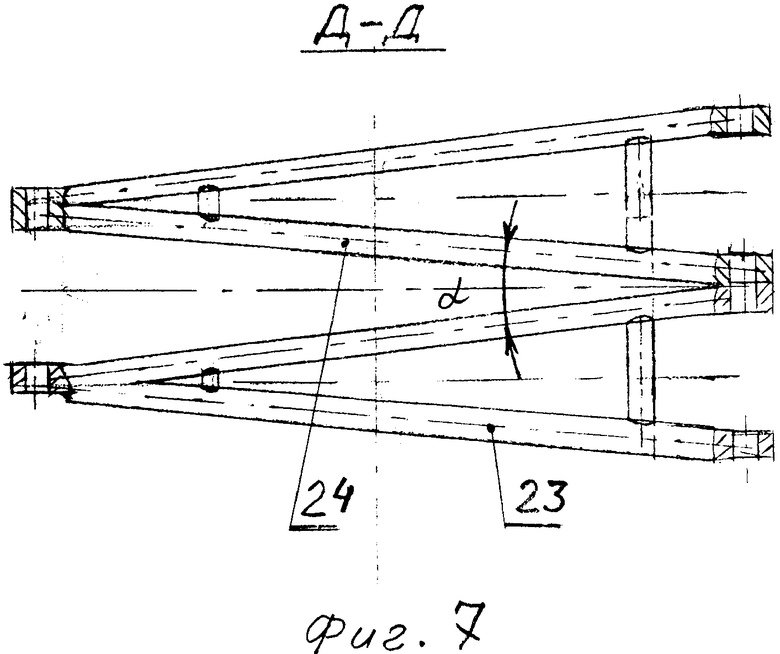
На фиг.7 изображен разрез Д-Д.
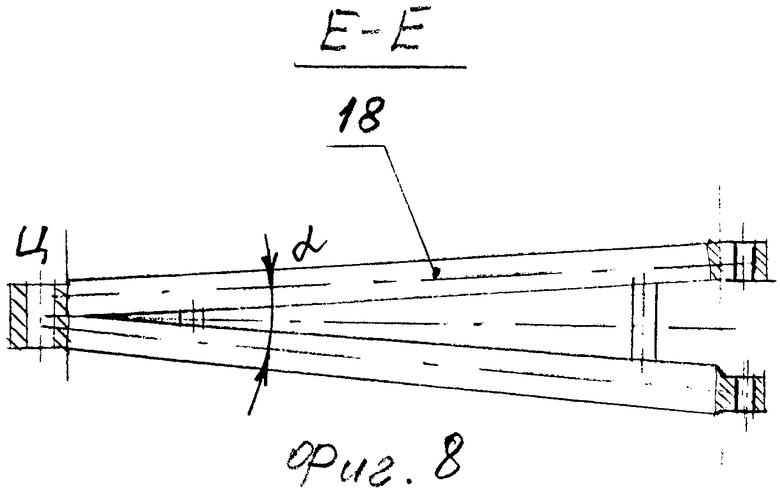
На фиг.8 изображен разрез Е-Е.
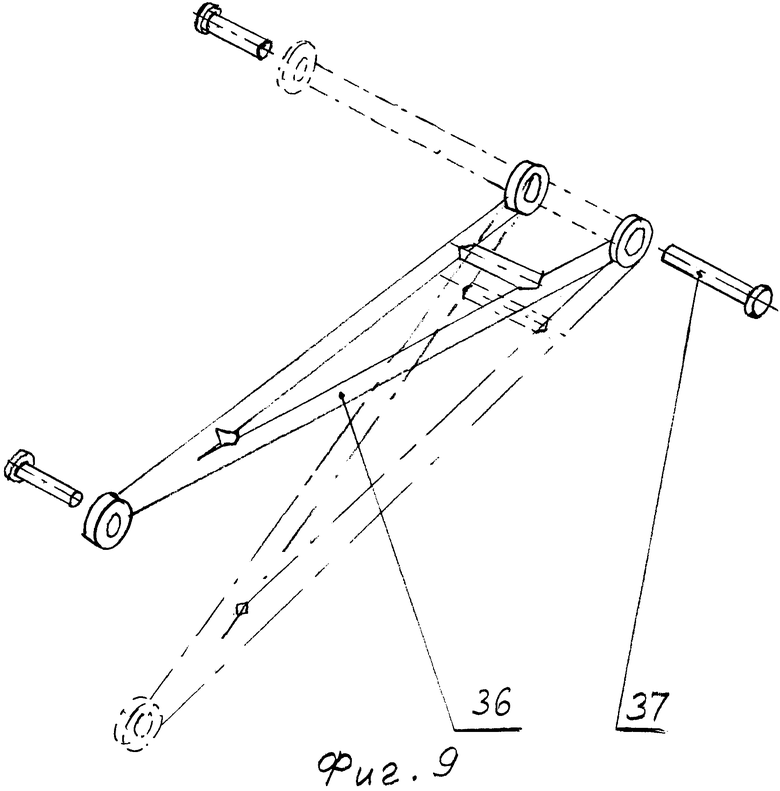
На фиг.9 изображена изометрия крайнего звена.
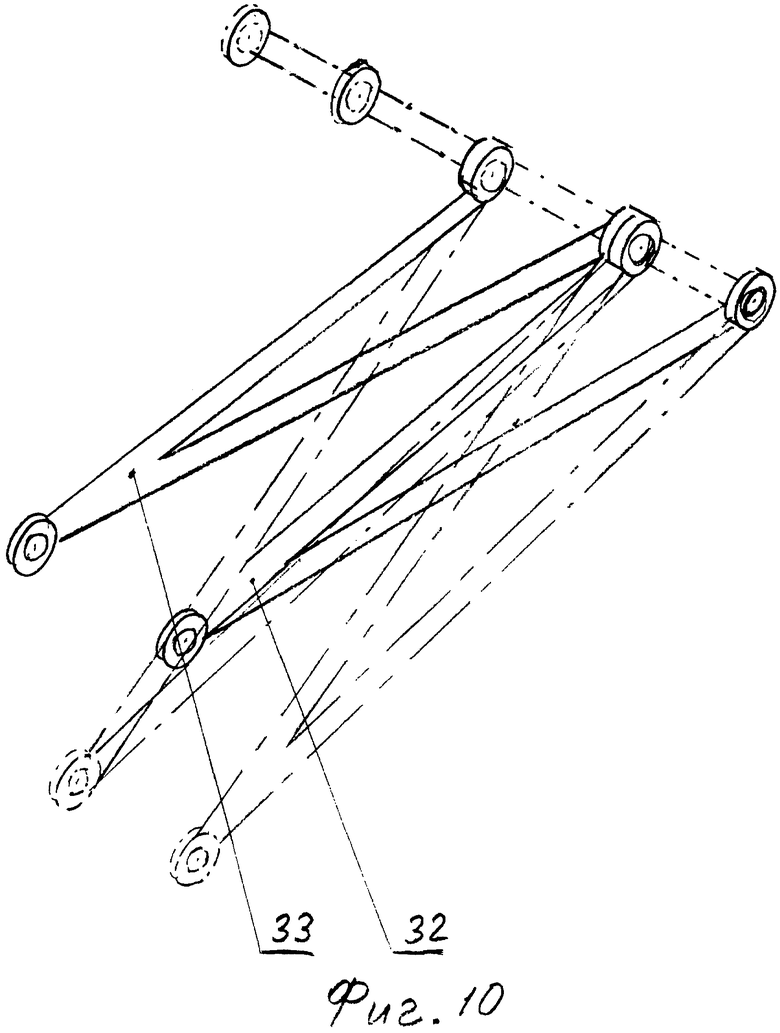
На фиг.10 изображена изометрия средних звеньев.
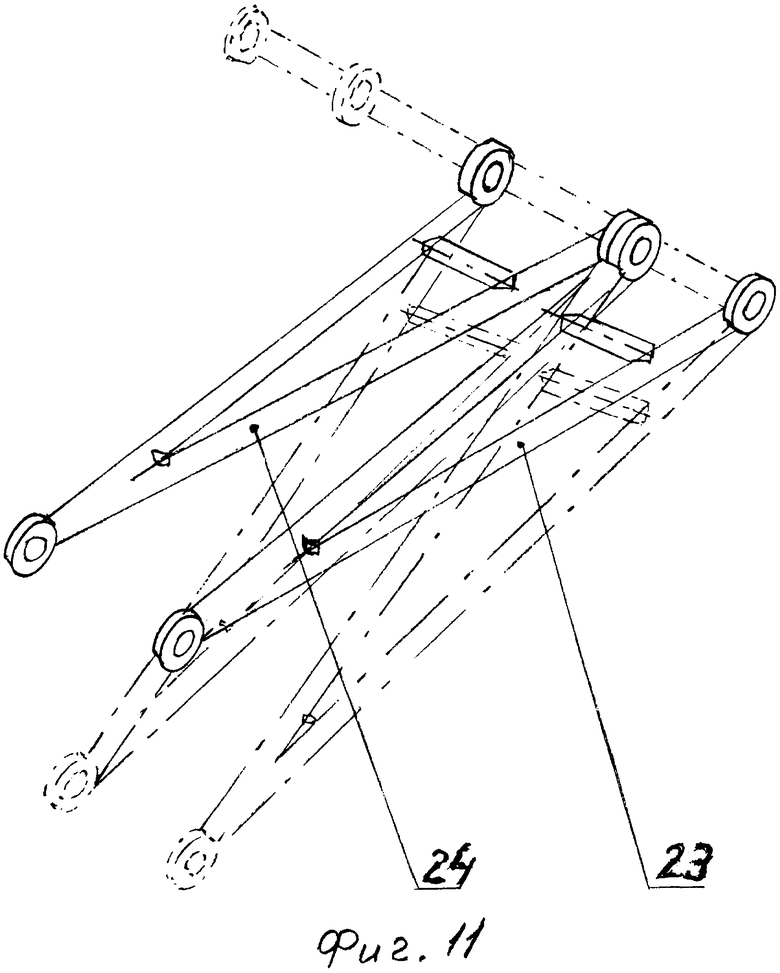
На фиг.11 изображена изометрия средних звеньев.
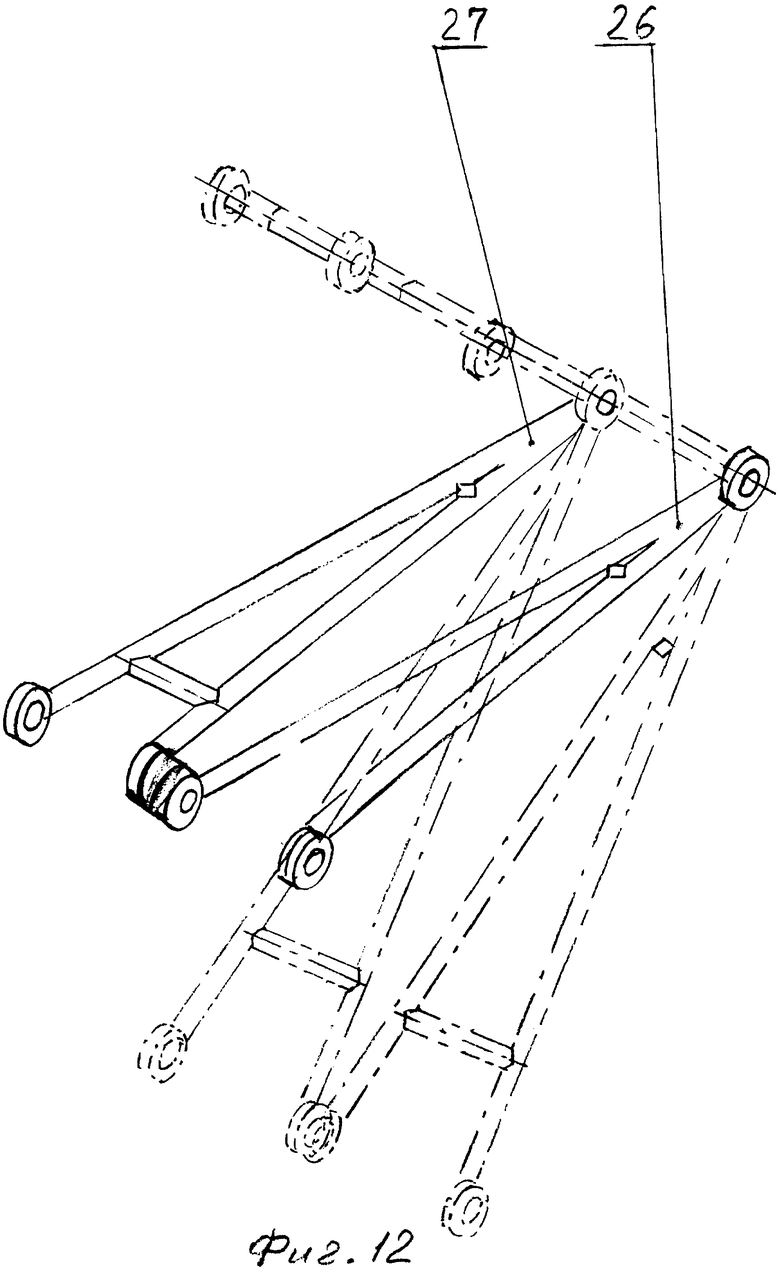
На фиг.12 изображена изометрия дополнительных звеньев.
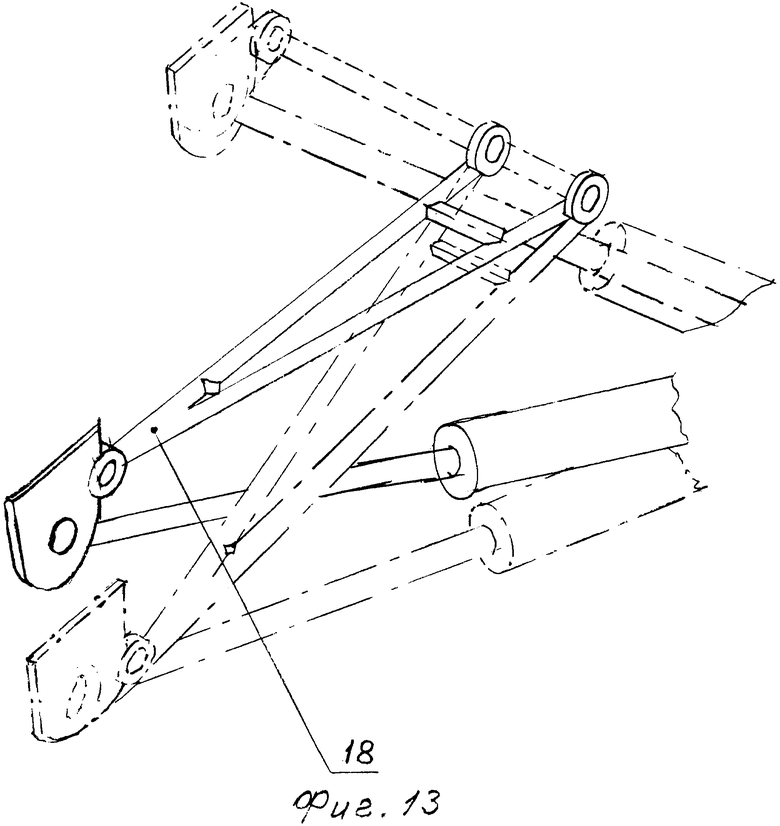
На фиг.13 изображена изометрия крайнего звена.
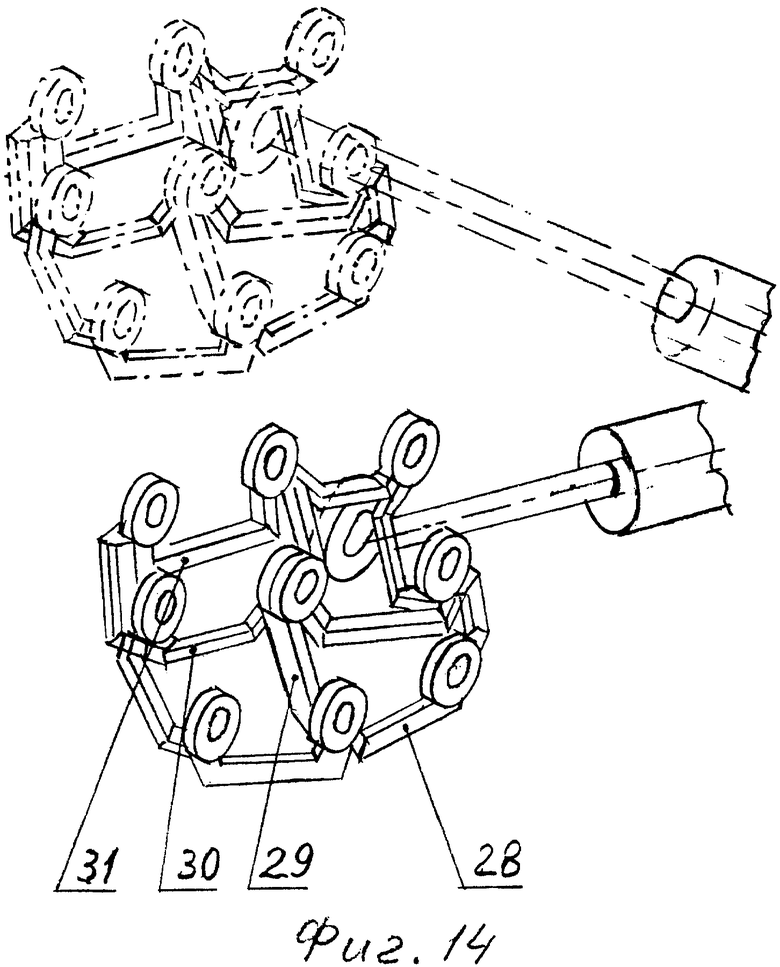
На фиг.14 изображена изометрия вспомогательных звеньев.
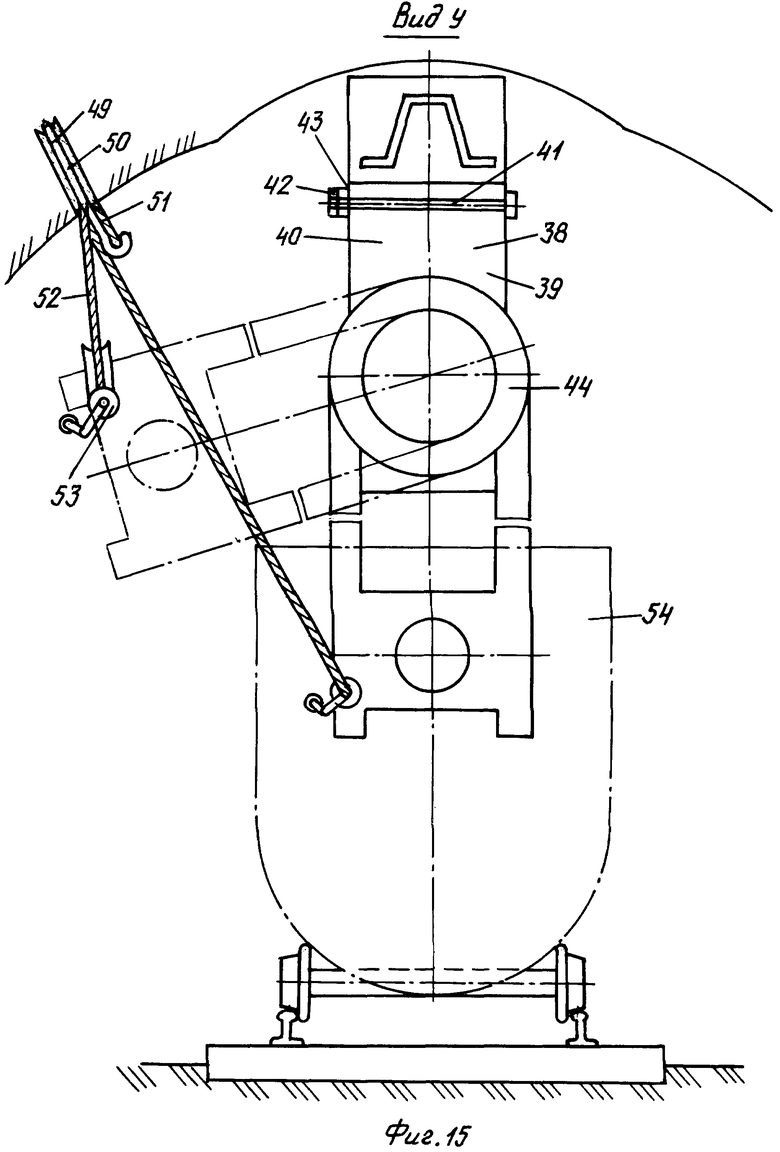
На фиг.15 изображен вид У на фиг.1.
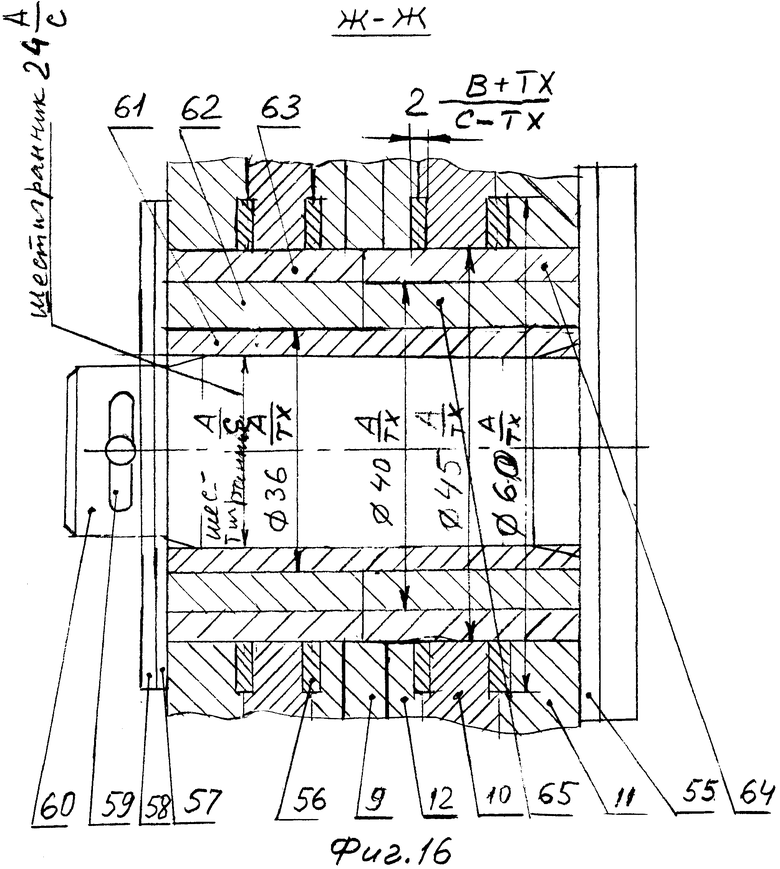
На фиг.16 изображен разрез Ж-Ж на фиг.2.
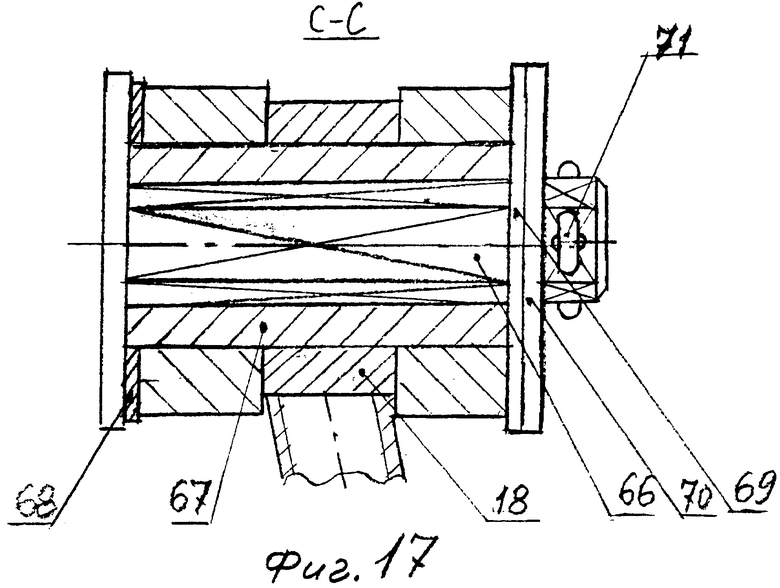
На фиг.17 изображен разрез С-С на фиг.2.
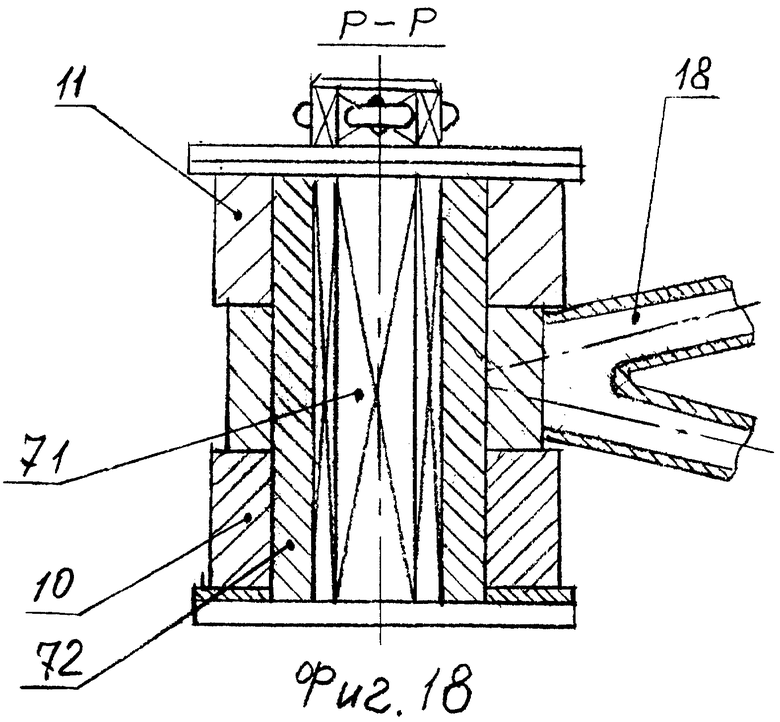
На фиг.18 изображен разрез Р-Р на фиг.2.
Манипулятор содержит: захваты 2, 3; пневмодвигатель 4; гидронасос 5; пульт управления 6; пневмошланг 7; гидрошланги 8; гидроцилиндр 9; вспомогательные звенья 10, 11; наружное звено 12; раму 13; тележку 14; поворотный круг с вертикальной осью 15; ролики 16; монорельс 17; крайнее звено 18; вспомогательные звенья 19, 20, 21, 22; средние звенья 23, 24; наружное звено 25; дополнительные звенья 26, 27; вспомогательные звенья 28, 29, 30, 31; средние звенья 32, 33; вспомогательные звенья 34, 35; крайнее звено 36; пальцы-оси 37; задний башмак 38, состоящий из двух половин 39,40; специальные болты 41; гайки 42; шайбы 43; поворотный передний круг с горизонтальной осью 44; задний соосный поворотный круг с горизонтальной осью 45; передний башмак 46, состоящий из двух половин 47, 48; штанговую крепь 49, 50, 51 для крепления каната 52 к кровле выработки; ручную червячную лебедку с барабаном 53; вагонетку, которую требуется по условиям работы в забое пропустить под повернутым манипулятором 54; бронзовую шайбу специальную 55; шайбу специальную из бронзы 56; шайбу специальную из бронзы 57; шайбу специальную из стали 58; шплинт специальный 59; палец шестигранный из стали 60; втулку с шестигранным отверстием 61; втулку из стали 62; втулку из бронзы 63; втулку из бронзы 64; втулку из стали 65; шестигранный палец - ось 66; втулку с шестигранным отверстием 67; шайбу специальную из бронзы 68,69; шайбу специальную из стали 70; шестигранный палец - ось 71; втулку с шестигранным отверстием из бронзы 72;
Расстояние между плоскостями, в которых лежат крайние звенья стрелы, а именно: на фиг.2 - ИН звенья 18 и 36, делится на расстояния, обозначенные буквами К, Л, М, а именно ИК, КЛ, ЛМ, МН, причем делится как в формуле на, а именно ИК=КЛ=ЛМ=МН, т.е. плоскостями со средними и дополнительными звеньями на четыре равные части. Расстояния между скрещивающимися и параллельными стержнями не являются величинами постоянными, так как изменяются при работе стрелы, но равны друг другу, идя от одного крайнего звена до другого, перпендикулярно плоскостям, в которых лежат V-образные звенья. Дополнительные звенья 26, 27 лежат в одной плоскости и скрещиваются со звеньями средними 32, 33, а также со звеньями крайними 36, 18, а также со средними звеньями 23, 24.
Расстояние между скрещивающими стержнями средних звеньев и скрещивающимися стержнями дополнительных звеньев принимается равным друг другу. В конструкции стрелы принимаются два дополнительных звена 26, 27; два плюс два 32 и 33 плюс 23 и 24 средних звеньев, два крайних звена 18 и 36, всего восемь V-образного профиля плюс двенадцать вспомогательных звеньев трубчато-стержневого профиля, итого восемь плюс двенадцать плюс два звена наружных 12 и 25. Расположение V-образных звеньев следующее: средние звенья по два в плоскости между крайним звеном 18 и дополнительными звеньями 26, 27 и два между крайним звеном 36 и дополнительными звеньями 26, 27. Итого двадцать два звена без рамы и привода.
Вспомогательные звенья на фиг.3 под номером 10, 11, 19, 30, 21, 22, 28, 29, 30, 31, 34, 35
На фиг.4 угол α может быть принят равным от 1° до 38°, аналогично на фиг.5, фиг.6, угол α, под которым скрещиваются стержни на фиг.4, 5 и 6 и пересекаются стержни звеньев также под углом α. Звенья крайние, дополнительные, средние закреплены к раме с помощью осей, шайб и шплинтов, не показанных на разрезах Б-Б фиг.4; В-В фиг.5; Г-Г фиг.6; Д-Д фиг.7; Е-Е фиг.8.
Вспомогательные звенья 10, 11, 19, 20, 21, 22, 28, 29, 30, 31, 34, 35 закреплены к крайним звеньям, средним звеньям, дополнительным звеньям осями, шайбами и шплинтами, не показанными на фигурах 3, 4, 5, 6, 7, 8, а также не показаны проушины рамы с целью упрощения чертежей. На фиг.16, на которой изображен разрез Ж-Ж с фиг.2, где 56 - шайбы специальные из бронзы, выполненные толщиной 2 мм с посадкой Вал + тепловая ходовая, толщина которой равна номиналу 2 мм плюс допуск В по системе вала по второму классу точности плюс посадка тепловая ходовая по второму классу точности, и сумм глубин пазов в щеках сопрягаемых деталей равна 2 мм минус посадка С по системе вала по второму классу точности для размера номинального два миллиметра. По посадке - скользящей - надета на ось с шестигранной посадкой по второму классу точности по системе отверстия втулка с шестигранным отверстием 61, с посадкой отверстие А. Посадка - скользящая - по системе отверстия сделана для того, чтобы бронзовая втулка не лопнула, но гарантированно поворачивалась при работе с пальцем - осью. Чтобы втулка шестигранная 61 при надевании не лопнула, лучше ось охладить, а втулку нагреть. Шестигранное отверстие во втулке 61 делают сверлом, а потом протяжкой.
Манипулятор, который служит для подъема груза 1, работает следующим образом: груз 1 кладут на захваты 2, 3, включают пневмодвигатель 4, который вращает гидронасос 5, который включается с помощью пульта управления 6, пневмодвигатель получает энергию сжатого воздуха по пневмошлангам 7, а гидронасос отдает энергию по маслошлангам 8 приводу в виде гидроцилиндра 9. Гидроцилиндр 9 толкает вспомогательные звенья 10, 11. Вспомогательные звенья 10, 11 толкают наружное звено 12 относительно рамы 13. Рама 13 относительно тележки 14 может поворачиваться с помощью поворотного круга 15. Тележка манипулятора 14 может передвигаться на роликах 16 по монорельсу 17. Вспомогательные звенья 10, 11 тянут крайнее звено 18 и толкают вспомогательные звенья 19, 20, 21, 22, относительно рамы 13. Вспомогательные звенья 19, 20, 21, 22 тянут средние звенья 23, 24, а наружное звено 12 толкает наружное звено 25.
Вспомогательные звенья 19, 20, 21, 22 толкают дополнительные звенья 26, 27, фиг.6, и толкают вспомогательные 28, 29, 30, 31, которые толкают средние звенья 32, 33. Средние звенья 32, 33 толкают вспомогательные звенья 34, 35, а вспомогательные звенья 28, 29, 30, 31 толкают вспомогательные звенья 34, 35, которые толкают крайнее звено 36, а наружное звено 25 тянет крайнее звено 36. В результате этих сил тянущих и толкающих крайнее звено 36 поворачивается в шарнирах на осях и проушинах рамы 13. Крайнее звено 36 тянет вспомогательные звенья 34, 35 и поднимает груз 1, лежащий на захватах 2, 3 относительно рамы 13 и земли, параллельно самому себе. Дополнительные звенья 26, 27 препятствуют движению относительно друг друга в направлении Т фиг.3 и фиг.6, так как имеют шарнир с общим пальцем-осью у вершины стрелы, и дополнительно соединены при помощи вспомогательных звеньев 19, 20, 21, 22 со средними звеньями 23, 24, стержни которых сходятся друг к другу у вершины стрелы, то есть пересекаются; аналогично средние звенья 32, 33 сходятся стержнями друг к другу у вершины стрелы, то есть пересекаются и через вспомогательные звенья 28, 29, 30, 31 препятствуют движению в направлении ФИТ дополнительных звеньев 26, 27 фиг.3, фиг.6. Крайнее звено 18 препятствует движению дополнительных звеньев 26, 27 относительно друг друга в направлении Ф, фиг.6, а также средних звеньев 32, 33 вокруг шарнира Щ в направлении Ш-Ш крайнего звена 36, фиг.4, фиг.5 где  - вершина стрелки, а ⊕ - хвост стрелки.
- вершина стрелки, а ⊕ - хвост стрелки.
Манипулятор, который служит для опускания груза 1, работает следующим образом: под груз 1 подводят захваты 2, 3 при помощи включения пневмодвигателя 4, который вращает гидронасос 5, который включается с помощью пульта управления 6, пневмодвигатель получает энергию сжатого воздуха по пневмошлангам 7, а гидронасос отдает энергию по маслошлангам 8 приводу в виде гидроцилиндра 9. Гидроцилиндр 9 тянет вспомогательные звенья 10, 11. Вспомогательные звенья 10, 11 тянут наружное звено 12 к раме 13. Рама 13 относительно тележки 14 может поворачиваться с помощью поворотного круга 15. Тележка манипулятора 14 может передвигаться на роликах 16 по монорельсу 17. Вспомогательные звенья 10, 11 тянут крайнее звено 18 и тянут вспомогательные звенья 19, 20, 21, 22 относительно рамы 13. Вспомогательные звенья 19, 20, 21, 22 тянут средние звенья 23, 24, а наружное звено 12 тянет наружное звено 25. Вспомогательные звенья 19, 20, 21, 22 тянут дополнительные звенья 26, 27, фиг.6, и тянут вспомогательные звенья 28, 29, 30, 31, которые тянут средние звенья 32, 33.
Средние звенья 32, 33 тянут вспомогательные звенья 34, 35, а вспомогательные звенья 28, 29, 30, 31 тянут вспомогательные звенья 34, 35, которые тянут крайнее звено 36, а наружное звено 25 тянет крайнее звено 36. В результате этих сил, тянущих и толкающих, крайнее звено 36 поворачивается в шарнирах на осях и проушинах рамы 13. Крайнее звено 36 тянет вспомогательные звенья 34, 35 и опускает груз 1, лежащий на захватах 2, 3 относительно рамы и земли, параллельно самому себе. Дополнительные звенья 26, 27 препятствуют движению относительно друг друга в направлении Т, фиг.3 и фиг.6, так как имеют шарнир с общим пальцем - осью у вершины стрелы, и дополнительно соединены при помощи вспомогательных звеньев 19, 20, 21, 22, со средними звеньями 23, 24, стержни которых сходятся друг к другу у вершины стрелы, то есть пересекаются; аналогично средние звенья 32, 33 сходятся стержнями друг к другу у вершины стрелы, то есть пересекаются и через вспомогательные звенья 28, 29, 30, 31 препятствуют движению в направлении Ф и Т дополнительных звеньев 26, 27, фиг.3 и фиг.6. Крайнее звено 18 препятствует движению д, фиг.6, а также средних звеньев 32, 33 вокруг шарнира Щ в направлении Ш-Ш крайнего звена 36, фиг.4, фиг.5, где  - вершина стрелки, а ⊕ - хвост стрелки.
- вершина стрелки, а ⊕ - хвост стрелки.
Устройство с башмаками работает следующим образом.
К монорельсу крепится задний башмак 38, состоящий из двух половин 39, 40 и крепится с помощью специальных болтов 41, гаек 42 и шайб 43; поворотный круг 44 с горизонтальной осью присоединяется к раме манипулятора 13 болтами, не показанными на фиг.2. Манипулятор отсоединяется от тележки болтами от поворотного круга с вертикальной осью 15, тележка отводится вперед по стрелкам →Э →Э, фиг.1.
К переду манипулятора к раме 13 присоединяется передний поворотный круг, соосный заднему 45, к монорельсу присоединяется передний башмак 46, состоящий из двух половин 47, 48. Передний круг 45 присоединяется к переднему башмаку 46. Закрепляют к кровле выработки штанговую крепь 49, 50, 51 для крепления каната 52. К манипулятору присоединяют червячную лебедку, фиг.15, п.53. Канат 52 наматывают на барабан лебедки 53. Канат 52 притягивает манипулятор и поворачивает последний в поворотных кругах 44, 45 к кровле выработки. Вагонетка 54, фиг.15, проходит под повернутым манипулятором. Манипулятор приводится в рабочее положение в обратном порядке. Отсоединяется передний поворотный круг 45, отсоединяется передний башмак 46 от монорельса, разъединяются на две половины 47, 48. Тележка приводится вперед к поворотному кругу 15, в направлении, противоположном стрелкам →Э →Э, присоединяется к нему и к манипулятору. Манипулятор отсоединяют от заднего поворотного круга 44. Отсоединяют задний башмак от монорельса, отвинтив специальные болты 41 и гайки 42. Манипулятор готов к подъему грузов 1, фиг.1, фиг.2. Перед отсоединением поворотных кругов манипулятор требуется опустить в крайнее положение, размотав канат 52 с барабана лебедки 53.
На фиг.16 меньше трение по меньшему диаметру, т.е. по диаметру 36  тем более что п.61 - втулка из бронзы-БРАЖ и имеется в виду, что при износе втулки, надетой на палец-ось 60, чем больше износ, тем больше поверхность трения и, значит, меньше катастрофический износ по большой поверхности контакта, т.е. меньше плотность нагрузки.
тем более что п.61 - втулка из бронзы-БРАЖ и имеется в виду, что при износе втулки, надетой на палец-ось 60, чем больше износ, тем больше поверхность трения и, значит, меньше катастрофический износ по большой поверхности контакта, т.е. меньше плотность нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2607343C2 |
| ВЕРТОЛЕТНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2519182C2 |
| Манипулятор | 1988 |
|
SU1569220A1 |
| КРЕПЬ СОПРЯЖЕНИЯ | 1992 |
|
RU2072050C1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| САМОХОДНЫЙ ПОДЪЕМНЫЙ КРАН И СПОСОБ ЕГО СБОРКИ (ВАРИАНТЫ) | 2008 |
|
RU2476371C2 |
| Кран-манипулятор | 1980 |
|
SU922048A1 |
| Строительный подъемник | 1990 |
|
SU1765092A1 |
| Прицеп для перевозки на раме тягача | 2022 |
|
RU2789565C1 |
| БАЗОВЫЙ МОДУЛЬ МАНИПУЛЯТОРНОЙ МАШИНЫ | 2012 |
|
RU2522496C2 |
Манипулятор относится к подъемным устройствам. Манипулятор для подъема груза содержит стрелу с крайними, средними и дополнительными V-образными звеньями, выполненными из трубчатых стержней одинаковой длины и разнесенных проушин со скрещивающимися стержнями под равными углами между крайними и дополнительными звеньями. К крайним, средним и дополнительным звеньям закреплены вспомогательные звенья, образующие с их вершинами силовые треугольники и образующие вершину стрелы, а также манипулятор снабжен наружными звеньями для поворота крайнего звена для подъема груза. Манипулятор также содержит захваты, приваренные к вспомогательным звеньям, привод в виде гидроцилиндра, раму, выполненную с возможностью поворота с помощью поворотного круга относительно тележки манипулятора, выполненной с возможностью передвижения по монорельсу, пневмодвигатель и гидронасос с пультом управления, жестко связанный с рамой. Количество звеньев манипулятора равно двадцати четырем, включая два крайних звена, четыре средних звена, два дополнительных звена, два наружных звена, двенадцать вспомогательных звеньев, раму и привод. Изобретение позволяет повысить прочность и надежность стрелы в статике и в работе, а также повысить КПД. 18 ил.
Манипулятор для подъема груза, содержащий стрелу с крайними, средними и дополнительными V-образными звеньями, выполненными из трубчатых стержней и разнесенных проушин со скрещивающимися стержнями под равными углами между крайними и дополнительными звеньями, вспомогательные звенья, закрепленные к крайним, средним и дополнительным звеньям и образующие с их вершинами силовые треугольники и образующие вершину стрелы, захваты, приваренные к вспомогательным звеньям, привод в виде гидроцилиндра, раму, выполненную с возможностью поворота с помощью поворотного круга относительно тележки манипулятора, выполненной с возможностью передвижения по монорельсу, пневмодвигатель, гидронасос с пультом управления, жестко связанный с рамой, отличающийся тем, что он снабжен наружными звеньями, предназначенными для поворота за счет тянущих и толкающих сил крайнего звена для подъема груза, при этом крайние, средние и дополнительные звенья имеют одинаковую длину стрежней, количество звеньев равно двадцати четырем, включая два крайних звена, четыре средних звена, два дополнительных звена, два наружных звена, двенадцать вспомогательных звеньев, раму и привод, причем стержни шести V-образных звеньев выполнены параллельными и двух V-образных звеньев - скрещивающимися относительно упомянутых шести звеньев, а углы V-образных звеньев, углы скрещивания и углы пересечения для всех крайних, средних и дополнительных звеньев равны и составляют от 1° до 36°, при этом расстояние между плоскостями, в которых лежат крайние звенья стрелы, разделено на четыре равные части плоскостями со средними звеньями, расположенными по два в плоскости, и с дополнительными звеньями, расположенными в одной плоскости.
| Манипулятор | 1988 |
|
SU1569220A1 |
| Подвесной монорельсовый манипулятор | 1982 |
|
SU1074808A1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| FR 2899831 A1, 19.10.2007. | |||

