Изобретение относится к области электротехники и может быть использовано в системах передачи и воспроизведения информации.
Известен способ фазирования вращающегося вала электродвигателя (АС №1272444 от 23.11.1986), при котором формируют последовательность импульсов опорной частоты ƒОП с опорного генератора, формируют последовательность импульсов с импульсного датчика частоты, расположенного на валу электродвигателя ƒОС, сравнивают последовательности импульсов частот ƒОП и ƒОС и определяют величину фазового рассогласования γ=Δϕ, формируют последовательность импульсов FОС, поступающих с датчика положения ротора электродвигателя, формируют последовательность импульсов фазирования FОП на выходе опорного генератора, сравнивают их, определяют величину и знак углового рассогласования Δϕ между указанными импульсами, формируют напряжение, пропорциональное заданному значению тока потребления двигателя, определяют время, соответствующее достижению фазовой координаты величин ϕПЕР=(ϕ0/2)(1-Мн/Мдв), где Мн - момент нагрузки, Мдв момент двигателя, от величины ϕ0 первоначального фазового рассогласования, в соответствии со знаком первоначального фазового рассогласования переводят электродвигатель из двигательного в тормозной режим или наоборот, при этом при положительном фазовом рассогласовании Δϕ указанных последовательностей импульсов прекращают подачу последовательности импульсов опорной частоты в момент, соответствующий достижению фазовой координатой величины ϕПЕР=(ϕ0/2)(1-Мн/Мдв), возобновляют подачу последовательности импульсов опорной частоты и прекращают подачу импульсов, поступающих с датчика положения ротора электродвигателя, возобновляют подачу последней последовательности импульсов в момент, соответствующий отработке валом электродвигателя фазового рассогласования с заданной точностью, а при отрицательном фазовом рассогласовании Δϕ указанных последовательностей импульсов прекращают подачу последовательности импульсов с датчика положения ротора электродвигателя в момент, соответствующий достижению фазовой координатной величины ϕПЕР=(ϕ0/2)(1+Мн/Мдв), затем возобновляют подачу последовательности импульсов с датчика положения ротора электродвигателя и прекращают подачу последовательности импульсов опорной частоты, возобновляют подачу последней последовательности импульсов в момент, соответствующий отработке валом электродвигателя фазового рассогласования с заданной точностью.
Устройство для реализации данного способа содержит опорный генератор, два логических элемента совпадения, импульсный частотно-фазовый дискриминатор, импульсный датчик частоты, датчик положения ротора, электродвигатель, блок определения фазового рассогласования, последовательно соединенные импульсный частотно-фазовый дискриминатор, усилительно-корректирующее устройство, электродвигатель, импульсный датчик частоты образуют контур фазовой автоподстройки частоты вращения двигателя.
Недостатком данного способа и устройства для его осуществления является невысокое быстродействие, обусловленное разделением во времени процессов синхронизации и фазирования.
Известен способ фазирования вращающегося вала электродвигателя (Патент RU №2475932 от 20.02.2013. Бюл. №5), по которому формируют последовательности импульсов опорной частоты fОП с опорного генератора и импульсов ƒОС с импульсного датчика частоты, расположенного на валу электродвигателя, сравнивают ƒОП и ƒОС и определяют величину фазового рассогласования γ=Δϕ, формируют напряжение, пропорциональное току потребления двигателя, формируют последовательности импульсов FОС, поступающих с датчика положения ротора электродвигателя и импульсов фазирования FОС на выходе опорного генератора, сравнивают FОС и FОП и определяют величину углового рассогласования Δα, отличающийся тем, что формируют на выходе импульсного частотно-фазового дискриминатора два дополнительных сигнала в моменты времени прихода двух импульсов частоты ƒОП между двумя соседними импульсами частоты ƒОС и при отсутствии импульсов частоты ƒОП между двумя соседними импульсами частоты ƒОС определяют величину частотного рассогласования Δƒ импульсов частот ƒОП и ƒОС, путем подсчета импульсов частоты ƒОП между двумя соседними импульсами дополнительных сигналов, сформированных на выходе импульсного частотно-фазового дискриминатора, и при достижении ею заданного положительного значения прекращают подачу импульсов fОП, переводят двигатель из двигательного в тормозной режим, причем в момент времени, определяемый на основе обработки полученных значений Δαн и Δωн, возобновляют подачу импульсов ƒОП, при достижении заданного отрицательного значения частотного рассогласования прекращают подачу импульсов ƒОС и переводят двигатель из тормозного в двигательный режим, в момент времени, определяемый на основе обработки полученных значений Δαн и Δωн, возобновляют подачу импульсов ƒОС.
Устройство для фазирования вращающегося вала электродвигателя, содержащее опорный генератор, первый выход которого подключен к первому входу первого логического элемента совпадения, к пятому входу блока определения фазового рассогласования и к первому входу блока определения частотного рассогласования, второй выход опорного генератора подключен к первому входу блока определения фазового рассогласования, вторые входы блока определения частотного рассогласования и блока определения фазового рассогласования подключены к третьему выходу импульсного частотно-фазового дискриминатора, третьи входы блока определения частотного рассогласования и блока определения фазового рассогласования подключены ко второму выходу импульсного частотно-фазового дискриминатора, а выход блока определения частотного рассогласования подключен к шестому входу блока определения фазового рассогласования, первый и второй выходы которого подключены соответственно к вторым входам первого и второго логических элементов совпадения, выходы первого и второго логических элементов совпадения подключены соответственно к первому и второму входам импульсного частотно-фазового дискриминатора, первый выход которого подключен к усилительно-корректирующему устройству, которое последовательно соединено с электродвигателем, с установленными на его валу импульсным датчиком частоты, выход которого соединен с первым входом логического элемента совпадения, и датчиком положения, выход которого подключен к четвертому входу блока определения фазового рассогласования.
Недостатком данного способа и устройства для его осуществления является низкая надежность работы электропривода в режиме фазирования, обусловленная прекращением подачи импульсов ƒОП или ƒОС на входы импульсного частотно-фазового дискриминатора в режиме фазирования, что приводит к нарушению алгоритма формирования импульсов 0/2 и 2/2 и, соответственно, функционирования блоков определения фазового и частотного рассогласований.
Техническим результатом изобретения является повышение надежности работы электропривода в режиме фазирования.
Указанный технический результат достигается тем, что в способе, по которому формируют последовательности импульсов опорной частоты ƒОП с опорного генератора и импульсов ƒОС с импульсного датчика частоты, расположенного на валу электродвигателя, сравнивают ƒОП и ƒОС и определяют величину фазового рассогласования γ=Δϕ, формируют напряжение, пропорциональное току потребления двигателя, формируют последовательности импульсов FОП, поступающих с датчика положения ротора электродвигателя, и импульсов фазирования FОП на выходе опорного генератора, сравнивают FОС и FОП и определяют величину углового рассогласования Δα, формируют на выходе импульсного частотно-фазового дискриминатора два дополнительных сигнала в моменты времени прихода двух импульсов частоты ƒОП между двумя соседними импульсами частоты ƒОС и при отсутствии импульсов частоты ƒОП между двумя соседними импульсами частоты ƒОС определяют величину частотного рассогласования Δƒ импульсов частот ƒОП и ƒОС, путем подсчета импульсов частоты fОП между двумя соседними импульсами дополнительных сигналов, сформированных на выходе импульсного частотно-фазового дискриминатора, согласно заявляемому изобретению при достижении величиной частотного рассогласования заданного положительного значения блокируют выходной сигнал импульсного частотно-фазового дискриминатора, переводя двигатель из двигательного в тормозной режим, причем в момент времени, определяемый на основе обработки полученных начальных значений угловой ошибки Δαн и ошибки по угловой скорости электропривода Δωн, блокируют выходной сигнал импульсного частотно-фазового дискриминатора, переводя двигатель из тормозного в двигательный режим, при достижении заданного нулевого значения частотного рассогласования прекращают блокировать выходной сигнал импульсного частотно-фазового дискриминатора, переводя систему автоматического управления электропривода в режим замкнутого управления.
Данный технический результат достигается также тем, что устройство, содержащее опорный генератор, первый выход которого подключен к пятому входу блока определения фазового рассогласования и к первому входу блока определения частотного рассогласования, второй выход опорного генератора подключен к первому входу блока определения фазового рассогласования, вторые входы блока определения частотного рассогласования и блока определения фазового рассогласования подключены к третьему выходу импульсного частотно-фазового дискриминатора, третьи входы блока определения частотного рассогласования и блока определения фазового рассогласования подключены ко второму выходу импульсного частотно-фазового дискриминатора, а выход блока определения частотного рассогласования подключен к шестому входу блока определения фазового рассогласования, последовательно соединенные усилительно-корректирующее устройство, электродвигатель, с установленными на его валу импульсным датчиком частоты и датчиком положения, выход которого подключен к четвертому входу блока определения фазового рассогласования, согласно заявляемому техническому решению введены два логических элемента «ИЛИ-НЕ», первый вход первого логического элемента «ИЛИ-НЕ» подключен к первому выходу импульсного частотно-фазового дискриминатора, вторые входы первого и второго логических элементов «ИЛИ-НЕ» подключены соответственно к первому и второму выходам блока определения фазового рассогласования, выход первого логического элемента «ИЛИ-НЕ» подключен к первому входу второго логического элемента «ИЛИ-НЕ», выход которого подключен к входу усилительно-корректирующего устройства.
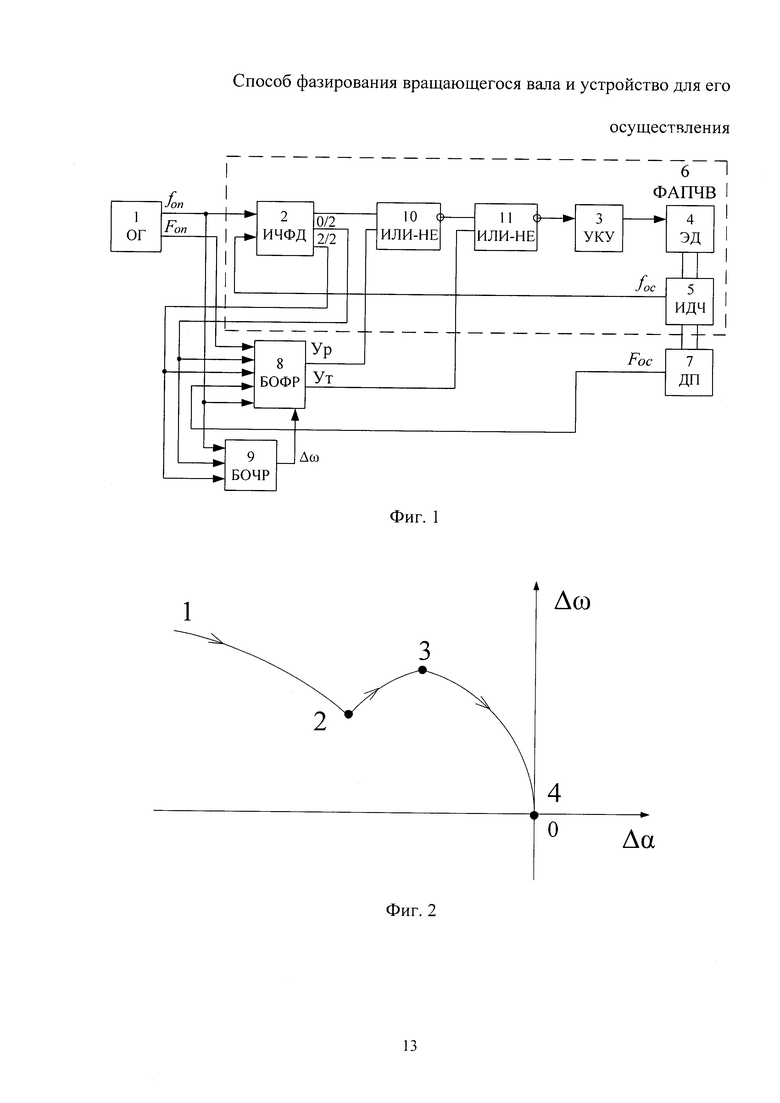
Сущность технического решения пояснена чертежами, где на фиг. 1 приведена функциональная электрическая схема предлагаемого устройства для фазирования вращающегося вала электродвигателя, на фиг. 2 - фазовый портрет его работы.
Устройство для реализации данного способа содержит опорный генератор 1, импульсный частотно-фазовый дискриминатор 2, усилительно-корректирующее устройство 3, электродвигатель 4, импульсный датчик частоты 5. Последовательно соединенные импульсный частотно-фазовый дискриминатор 2, усилительно-корректирующее устройство 3, электродвигатель 4, импульсный датчик частоты 5, логические элементы «ИЛИ-НЕ» 10 и 11 образуют контур фазовой автоподстройки частоты вращения двигателя (ФАПЧВ) 6. Устройство также содержит датчик положения 7, блок определения фазового рассогласования 8, блок определения частотного рассогласования 9.
Для осуществления способа фазирования вращающегося вала электродвигателя первый выход опорного генератора 1 подключен к первому входу импульсного частотно-фазового дискриминатора 2, к пятому входу блока определения фазового рассогласования 8 и к первому входу блока определения частотного рассогласования 9, второй выход опорного генератора 1 подключен к первому входу блока определения фазового рассогласования 8. Вторые входы блока определения частотного рассогласования 9 и блока определения фазового рассогласования 8 подключены к третьему выходу импульсного частотно-фазового дискриминатора 2, третьи входы блока определения частотного рассогласования 9 и блока определения фазового рассогласования 8 подключены ко второму выходу импульсного частотно-фазового дискриминатора 2, а выход блока определения частотного рассогласования 9 подключен к шестому входу блока определения фазового рассогласования 8. Первый выход импульсного частотно-фазового дискриминатора 2 подключен к первому входу первого логического элемента «ИЛИ-НЕ» 10, выход которого подключен к первому входу второго элемента «ИЛИ-НЕ» 11. Первый и второй выходы блока определения фазового рассогласования 8 подключены, соответственно, к вторым входам первого и второго логических элементов «ИЛИ-НЕ» 10 и 11. Выход второго логического элемента «ИЛИ-НЕ» 11 подключен к последовательно соединенным усилительно-корректирующему устройству 3, электродвигателю 4, с установленными на его валу импульсным датчиком частоты 5 и датчиком положения 7, выход которого подключен к четвертому входу блока определения фазового рассогласования 8. Импульсный частотно-фазовый дискриминатор 2, два логических элемента «ИЛИ-НЕ» 10 и 11, усилительно-корректирующее устройство 3, электродвигатель 4 и импульсный датчик частоты 5 образуют контур фазовой автоподстройки частоты вращения 6.
Способ фазирования вращающегося вала электродвигателя реализуется следующим образом: формируют последовательность импульсов опорной частоты ƒОП на первом выходе опорного генератора 1, формируют последовательность импульсов с импульсного датчика частоты 7, расположенного на валу электродвигателя 4 ƒОС, сравнивают с помощью импульсного частотно-фазового дискриминатора 2 последовательности импульсов частот ƒОП и ƒОС и определяют величину фазового рассогласования γ=Δϕ, формируют напряжение, пропорциональное току потребления двигателя, формируют последовательность импульсов FОС, поступающих с датчика положения 7 ротора электродвигателя 4, формируют последовательность импульсов фазирования (импульсов угловой привязки) FОП на втором выходе опорного генератора 1, сравнивают в блоке определения фазового рассогласования 8 последовательности импульсов частот FОП и FОС и определяют величину углового рассогласования Δα, формируют на выходе импульсного частотно-фазового дискриминатора 2 два дополнительных сигнала в моменты времени прихода двух импульсов частоты ƒОП между двумя соседними импульсами частоты ƒОС (2/2) и при отсутствии импульсов частоты ƒОП между двумя соседними импульсами частоты ƒОС (0/2) определяют величину частотного рассогласования Δƒ импульсов частот ƒОП и ƒОС в блоке определения частотного рассогласования 8 путем подсчета импульсов частоты ƒОП между двумя соседними импульсами дополнительных сигналов (0/2 или 2/2), сформированных на выходе импульсного частотно-фазового дискриминатора 2. При достижении величиной частотного рассогласования заданного положительного значения блокируют выходной сигнал импульсного частотно-фазового дискриминатора, переводя двигатель из двигательного в тормозной режим, причем в момент времени, определяемый на основе обработки полученных начальных значений угловой ошибки Δαн и ошибки по угловой скорости электропривода Δωн, блокируют выходной сигнал импульсного частотно-фазового дискриминатора, переводя двигатель из тормозного в двигательный режим, при достижении заданного нулевого значения частотного рассогласования прекращают блокировать выходной сигнал импульсного частотно-фазового дискриминатора, переводя систему автоматического управления электропривода в режим замкнутого управления.
Устройство работает следующим образом:
При подаче напряжения на обмотки электродвигателя электропривод переходит в режим разгона, т.к. величина частоты ƒОП превосходит частоту ƒОС в переходном режиме работы электропривода. На обмотки двигателя подается максимально допустимое значение напряжения, обеспечивающее работу электродвигателя в двигательном режиме (на фиг. 2 - участок фазовой траектории 1-2). При достижении величиной частотного рассогласования, определяемого в блоке определения фазового рассогласования 8, заданного положительного значения с помощью логических элементов «ИЛИ-НЕ», управляемых от блока определения фазового рассогласования 8, блокируют сигналом Ут выходной сигнал импульсного частотно-фазового дискриминатора 2, переводя двигатель из двигательного в тормозной режим (на фиг. 2 - участок фазовой траектории 2-3), причем в момент времени, определяемый в блоке определения фазового рассогласования 8, на основе обработки полученных начальных значений угловой ошибки Δαн и ошибки по угловой скорости Δωн электропривода, блокируют сигналом Ур выходной сигнал импульсного частотно-фазового дискриминатора 2, переводя двигатель из тормозного в двигательный режим (на фиг. 2 - участок фазовой траектории 3-4), при достижении заданного нулевого значения частотного рассогласования, определяемого в блоке определения частотного рассогласования 9 (на фиг. 2 - точка 4 фазовой траектории), прекращают блокировать выходной сигнал импульсного частотно-фазового дискриминатора, переводя систему автоматического управления электропривода в режим замкнутого управления. В результате система управления переводит электропривод в установившийся режим работы.
Предлагаемое техническое решение позволяет повысить надежность электропривода в режиме фазирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475932C1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608177C2 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| ЧАСТОТНО-ФАЗОВЫЙ ДИСКРИМИНАТОР | 2010 |
|
RU2428785C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2462809C1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1989 |
|
SU1612368A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
Изобретение относится к области электротехники и может быть использовано в высокоточных электроприводах сканирующих систем. Технический результат заключается в повышении надежности работы электропривода в режиме фазирования. В способ фазирования вращающегося вала электродвигателя в устройство для его осуществления введены два логических элемента «ИЛИ-НЕ». Выход первого логического элемента «ИЛИ-НЕ» подключен к первому выходу импульсного частотно-фазового дискриминатора. Вторые входы первого и второго логических элементов «ИЛИ-НЕ» подключены соответственно к первому и второму выходам блока определения фазового рассогласования. Выход первого логического элемента «ИЛИ-НЕ» подключен к первому входу второго логического элемента «ИЛИ-НЕ», выход которого подключен к входу усилительно-корректирующего устройства. 2 н.п. ф-лы, 2 ил.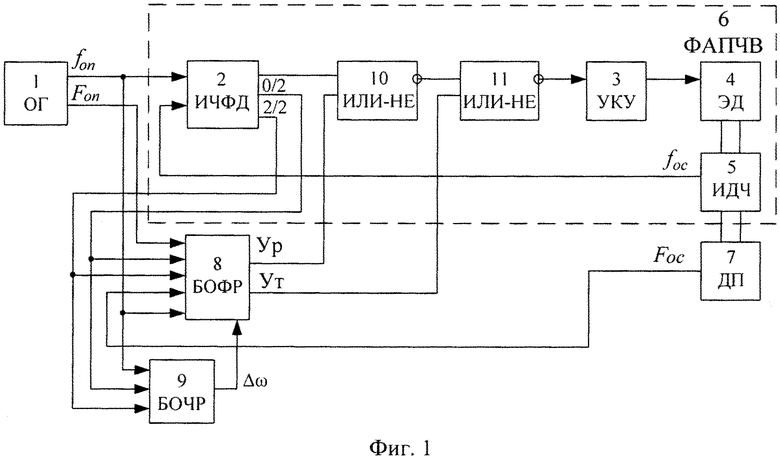
1. Способ фазирования вращающегося вала электродвигателя, по которому формируют последовательности импульсов опорной частоты fОП с опорного генератора и импульсов  с импульсного датчика частоты, расположенного на валу электродвигателя, сравнивают
с импульсного датчика частоты, расположенного на валу электродвигателя, сравнивают  и
и  и определяют величину фазового рассогласования γ=Δϕ, формируют напряжение, пропорциональное току потребления двигателя, формируют последовательности импульсов FОС, поступающих с датчика положения ротора электродвигателя и импульсов фазирования FОП на выходе опорного генератора, сравнивают FОС и FОП и определяют величину углового рассогласования Δα, формируют на выходе импульсного частотно-фазового дискриминатора два дополнительных сигнала в моменты времени прихода двух импульсов частоты
и определяют величину фазового рассогласования γ=Δϕ, формируют напряжение, пропорциональное току потребления двигателя, формируют последовательности импульсов FОС, поступающих с датчика положения ротора электродвигателя и импульсов фазирования FОП на выходе опорного генератора, сравнивают FОС и FОП и определяют величину углового рассогласования Δα, формируют на выходе импульсного частотно-фазового дискриминатора два дополнительных сигнала в моменты времени прихода двух импульсов частоты  между двумя соседними импульсами частоты
между двумя соседними импульсами частоты  и при отсутствии импульсов частоты
и при отсутствии импульсов частоты  между двумя соседними импульсами частоты
между двумя соседними импульсами частоты  определяют величину частотного рассогласования
определяют величину частотного рассогласования  импульсов частот и
импульсов частот и  , путем подсчета импульсов частоты между двумя соседними импульсами дополнительных сигналов, сформированных на выходе импульсного частотно-фазового дискриминатора, отличающийся тем, что при достижении величиной частотного рассогласования заданного положительного значения блокируют выходной сигнал импульсного частотно-фазового дискриминатора, переводя двигатель из двигательного в тормозной режим, причем в момент времени, определяемый на основе обработки полученных начальных значений угловой ошибки Δαн и ошибки по угловой скорости электропривода Δωн, блокируют выходной сигнал импульсного частотно-фазового дискриминатора, переводя двигатель из тормозного в двигательный режим, при достижении заданного нулевого значения частотного рассогласования прекращают блокировать выходной сигнал импульсного частотно-фазового дискриминатора, переводя систему автоматического управления электропривода в режим замкнутого управления.
, путем подсчета импульсов частоты между двумя соседними импульсами дополнительных сигналов, сформированных на выходе импульсного частотно-фазового дискриминатора, отличающийся тем, что при достижении величиной частотного рассогласования заданного положительного значения блокируют выходной сигнал импульсного частотно-фазового дискриминатора, переводя двигатель из двигательного в тормозной режим, причем в момент времени, определяемый на основе обработки полученных начальных значений угловой ошибки Δαн и ошибки по угловой скорости электропривода Δωн, блокируют выходной сигнал импульсного частотно-фазового дискриминатора, переводя двигатель из тормозного в двигательный режим, при достижении заданного нулевого значения частотного рассогласования прекращают блокировать выходной сигнал импульсного частотно-фазового дискриминатора, переводя систему автоматического управления электропривода в режим замкнутого управления.
2. Устройство для фазирования вращающегося вала электродвигателя, содержащее опорный генератор, первый выход которого подключен к пятому входу блока определения фазового рассогласования и к первому входу блока определения частотного рассогласования, второй выход опорного генератора подключен к первому входу блока определения фазового рассогласования, вторые входы блока определения частотного рассогласования и блока определения фазового рассогласования подключены к третьему выходу импульсного частотно-фазового дискриминатора, третьи входы блока определения частотного рассогласования и блока определения фазового рассогласования подключены ко второму выходу импульсного частотно-фазового дискриминатора, а выход блока определения частотного рассогласования подключен к шестому входу блока определения фазового рассогласования, последовательно соединенные усилительно-корректирующее устройство, электродвигатель, с установленными на его валу импульсным датчиком частоты и датчиком положения, выход которого подключен к четвертому входу блока определения фазового рассогласования, отличающееся тем, что в него введены два логических элемента «ИЛИ-НЕ», первый вход первого логического элемента «ИЛИ-НЕ» подключен к первому выходу импульсного частотно-фазового дискриминатора, вторые входы первого и второго логических элементов «ИЛИ-НЕ» подключены соответственно к первому и второму выходам блока определения фазового рассогласования, выход первого логического элемента «ИЛИ-НЕ» подключен к первому входу второго логического элемента «ИЛИ-НЕ», выход которого подключен к входу усилительно-корректирующего устройства.
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475932C1 |
| Станок для шероховки камер шинно-пневматических муфт | 1961 |
|
SU145335A1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ РЕГУЛЯРНОЙ НАСАДКИ | 2004 |
|
RU2281826C2 |
| JP 3383264 A1, 04.03.2003 | |||
| DE 60034977 T2, 31.01.2008 | |||
| US 6603279 B2, 05.08.2003 | |||
| Садок для насекомых с положительным фототаксисом | 1981 |
|
SU1014553A1 |

