Изобретение относится к способу классификации движущихся транспортных средств, как типично известно из патента ЕР 2011103 В1.
Классификация транспортных средств в движущемся транспортном потоке имеет широкий спектр применений. В частности, в рамках автоматизированного контроля и регулирования дорожного движения придается большое значение автоматической грубой классификации для подразделения транспортных средств на большие и более медленные (грузовые автомобили, автобусы) и меньшие и более скоростные транспортные средства (легковые автомобили). В соответствии с определенными классами транспортных средств можно, например, собирать плату за проезд дифференцированно по классам транспортных средств, регулировать светофоры или наказывать за нарушение правил движения.
В известном из уровня техники способе для грубой классификации транспортных средств отнесение к определенному классу транспортных средств осуществляется часто путем определения индивидуальных длин транспортных средств на основе входа и выхода транспортного средства в/из участка измерений измерительного устройства. С помощью способа оценки можно из полученных сигналов с достаточной надежностью сформировать оцениваемый признак для длины транспортного средства, который позволяет выполнить соотнесение транспортных средств либо к классу автобусов или грузовых автомобилей, либо к классу легковых автомобилей. Известные для этого устройства работают либо с индукционными шлейфами, которые выполняют классификацию на основе определенной при проезде длины и дорожного просвета транспортных средств, либо с радиолокационными приборами, которые выполняют классификацию на основе проезда транспортного средства через конус радиолокационного луча (радиолокационный конус) с помощью длины транспортного средства, определяемой из длительности проезда и скорости.
В способе, раскрытом в выложенной заявке ЕР 1990654 А1, осуществляется определение длины транспортного средства с помощью радиолокационного прибора, установленного под острым углом сбоку от дорожного полотна. На основе точек удаления, определенных при появлении и пропадании транспортного средства, и известного угла можно определить длину участка проезда транспортного средства через радиолокационный конус. Из определенной скорости транспортного средства и времени проезда можно определить полный путь, проделанный за это время транспортным средством. Тем самым можно из разности полного пути и участка проезда рассчитать длину транспортного средства и посредством сравнения с типичными для класса длинами транспортных средств классифицировать зарегистрированное транспортное средство. При этом способе невозможно избежать влияний погрешностей, возникающих из-за взаимного перекрытия транспортных средств.
В способе, описанном в выложенной заявке DE 3810357 А1, классификация осуществляется также на основе определенной длины транспортного средства. Для этого сначала при проезде транспортного средства через радиолокационный конус радиолокационного прибора принимается доплеровский эхо-сигнал, и из его частотного спектра определяется частота с максимальной амплитудой. На основе этой частоты определяется скорость. Из скорости и сигнальной длительности доплеровского эхо-сигнала можно определить длину транспортного средства. Измерение длины транспортного средства через сигнальную длительность связано с различными возмущающими влияниями. Так как радиолокационное излучение отражается от большой площади, зависимой от длины транспортного средства, сигнальная длительность в принципе искажается из-за длины транспортного средства. Кроме того, затенения на частях транспортного средства радиолокационного излучения, направляемого косо к транспортному средству, приводят к искаженному измерению длины. Для повышения точности измерения длины для каждого параметра влияния применяется отдельный и определяемый эмпирически коэффициент коррекции. Классификация осуществляется в итоге путем сравнения скорректированной временной характеристики доплеровского эхо-сигнала с сохраненными и идентифицированными образцами. В итоге, полученная длина транспортного средства является лишь очень грубой оценкой, при которой можно легко прийти к ошибочным результатам классификации.
Гипотетическая возможность выполнения классификации транспортных средств без непосредственного определения длины транспортного средства описана в патенте ЕР 2011103 В1. С помощью радиолокационного прибора радиолокационный луч направляется вдоль пути дорожного движения. Применяется радиолокатор с непрерывным линейно-частотно-модулированным излучением, с помощью которого можно определять скорости и дальности до участников дорожного движения. Отраженные от участников дорожного движения сигналы отделяются от шумов и оцениваются в устройстве обработки данных. В качестве результата этой обработки формируются два коэффициента преобразования Фурье, причем один коэффициент представляет собой функцию дальности, а другой коэффициент - функцию скорости определяемого участника дорожного движения. Если обе функции нанести по отношению друг к другу по двум размерностям прямоугольной системы координат, то возникают образцы, характерные для различных участников дорожного движения. Состав и форма этих образцов являются при этом мерой для рассеяния скоростей и расстояний отраженных сигналов участника дорожного движения, статистическая оценка которых позволяет выполнить соотнесение участников дорожного движения к предопределенным классам. Однако на основе принципа измерений радиолокатора с линейно-частотно-модулированным непрерывным излучением невозможно соотнести никакой угол с определяемыми объектами. Правда, с ним можно установить, что, например, легковой автомобиль или грузовой автомобиль находится в радиолокационном конусе, однако этот вывод, если несколько участников дорожного движения одновременно находятся в радиолокационном конусе, невозможно ассоциировать с ними надежным образом.
Другое решение (Fang et al., 2007, IET International Conference on Radar Systems, 1-4) учитывает, что радиолокационное излучение на практике отражается во многих местах транспортного средства и что могут иметь соответствующие рассеяния принимаемого радиолокационного сигнала. Эти рассеянные сигналы определяются как доплеровские частоты отражающих частей транспортного средства по времени. При этом получают семейство характеристик доплеровских частот, которые могут быть соотнесены с пространственными координатами посредством Hough-преобразования. Посредством этих пространственных координат и их относительных взаимосвязей друг с другом можно выполнить соотнесение соответствующих измеряемых транспортных средств с высокой надежностью к определенному классу величин.
Задачей изобретения является найти способ, который позволил бы одновременно и надежно классифицировать несколько транспортных средств, проезжающих через радиолокационный конус.
Эта задача для способа классификации транспортных средств, при котором транспортные средства при проезде через радиолокационный конус, образованный радиолокационным излучением, измеряются, при этом поверхности транспортного средства, облученные радиолокационным излучением, отражают радиолокационное излучение и формируют измерительные сигналы с частотами, соответствующими доплеровскому сдвигу, решается следующими этапами способа.
Радиолокационный прибор с угловым разрешением, который вырабатывает измерительные сигналы с частотами, соответственно доплеровскому сдвигу, из которых могут быть выведены радиальные дальности, целевой угол и радиальная скорость, устанавливается на высоте установки относительно поверхности дорожного полотна, а также под горизонтальным острым углом установки к краю дорожного полотна.
Этот радиолокационный прибор испускает радиолокационное излучение, образующее радиолокационный конус, и в различные моменты времени измерений во время измерений регистрируются измерительные сигналы, приходящие от по меньшей мере одного проезжающего через радиолокационный конус, и, тем самым, измеряемое транспортное средство.
Частоты зарегистрированных измерительных сигналов измеряемых транспортных средств сохраняются как функции по времени измерений, и из них формируется спектрограмма для каждого транспортного средства.
Затем спектрограммы проверяются на области оценки с максимальной шириной полосы частоты, и эти области оценки сравниваются с областями оценки заданных и сохраненных спектрограмм для различных классов транспортных средств. Измеренные транспортные средства затем соответственно соотносятся с классом транспортных средств, для которого имеется сохраненная спектрограмма, которая является наиболее близкой к сформированной спектрограмме. При этом сравнение может ограничиваться на том, что максимальные ширины полосы сформированных спектрограмм сравниваются с максимальными ширинами полосы заданных сохраненных спектрограмм. В области оценки устанавливается по меньшей мере один момент времени измерения в качестве момента времени оценки.
Предпочтительным образом из измеренных сигналов в по меньшей мере один из моментов времени оценки внутри области оценки с максимальной шириной полосы выводятся соответственно целевые углы, которые для соответствующего момента времени оценки соответственно сохраняются как функция по частоте, и характеристика функции сравнивается с сопоставительными моделями, сохраненными для различных классов транспортных средств, чтобы верифицировать классификацию транспортных средств.
В качестве альтернативы, предпочтительным образом из измерительных сигналов в по меньшей мере один из моментов времени оценки внутри области оценки с максимальной шириной полосы выводятся соответствующие радиальные расстояния, которые для соответствующего момента времени оценки, соответственно, сохраняются как функция по частоте, и характеристика функций сравнивается с сохраненными сопоставительными моделями для различных классов транспортных средств, чтобы верифицировать классификацию транспортных средств.
Является предпочтительным, если из измеренных сигналов в по меньшей мере один из моментов времени оценки внутри областей оценки с максимальной шириной полосы сигнальные амплитуды измерительных сигналов для соответствующего момента времени оценки соответственно сохраняются как функция по частоте, и характеристика функций сравнивается с сохраненными сопоставительными моделями для различных классов транспортных средств, чтобы верифицировать классификацию транспортных средств.
Предпочтительным образом, из сравнения всех образованных функций с сохраненными сопоставительными моделями осуществляется моделирование параметров транспортных средств.
Является предпочтительным, при формировании каждой функции определять распределение вероятностей для различных параметров транспортных средств и эти вероятности сохранять взвешенным образом по всей временной характеристике.
Далее изобретение поясняется более подробно на примерах выполнения. На соответствующих чертежах показано следующее:
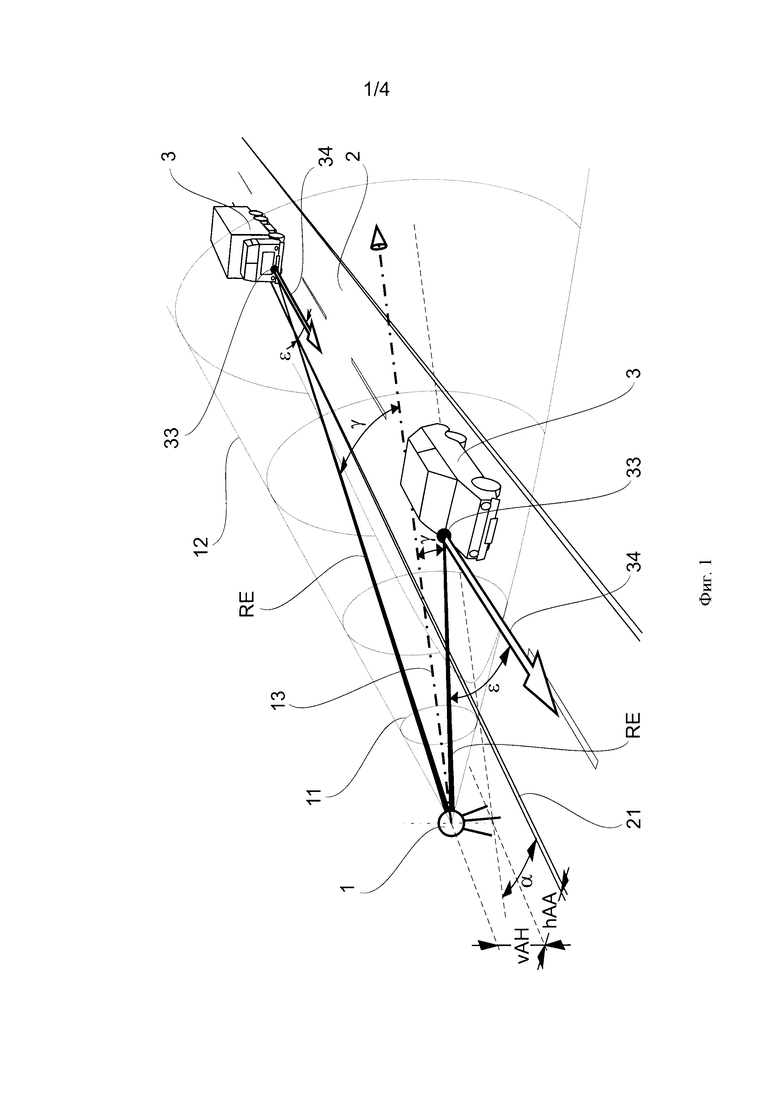
Фиг.1 - схематичное представление расположения радиолокационного прибора рядом с дорожным полотном;
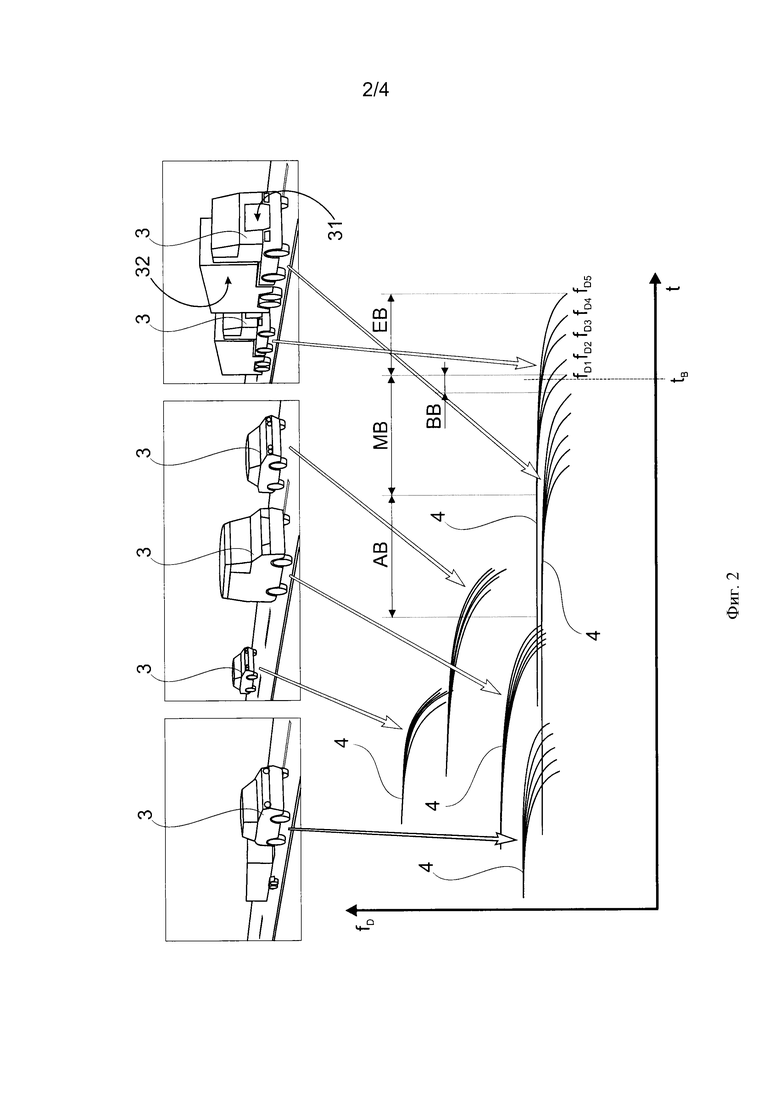
Фиг.2 - спектрограммы нескольких транспортных средств, измеренных в пространстве времени измерения;
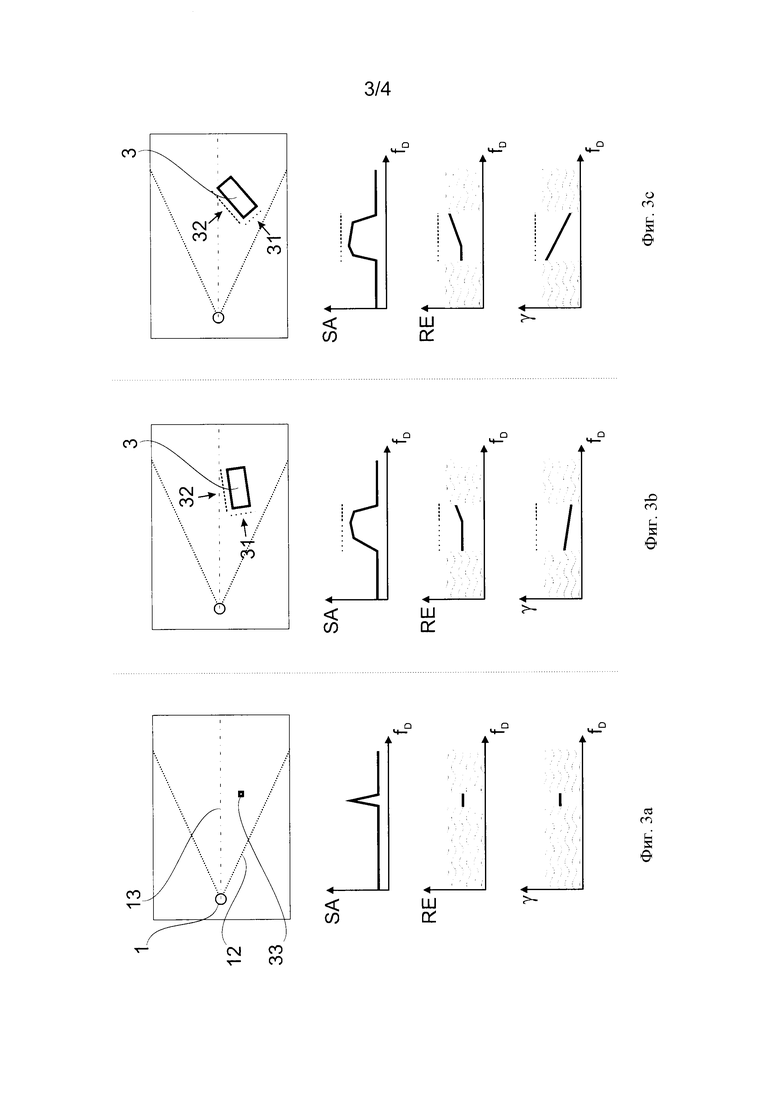
Фиг.3а - принципиальный вывод частотных спектров сигнальных компонентов из измерительных сигналов точечного отражателя;
Фиг.3b - принципиальный вывод частотных спектров сигнальных компонентов из измерительных сигналов преимущественно фронтально регистрируемого транспортного средства;
Фиг.3с - принципиальный вывод частотных спектров сигнальных компонентов из измеренных сигналов преимущественно сбоку регистрируемого транспортного средства;
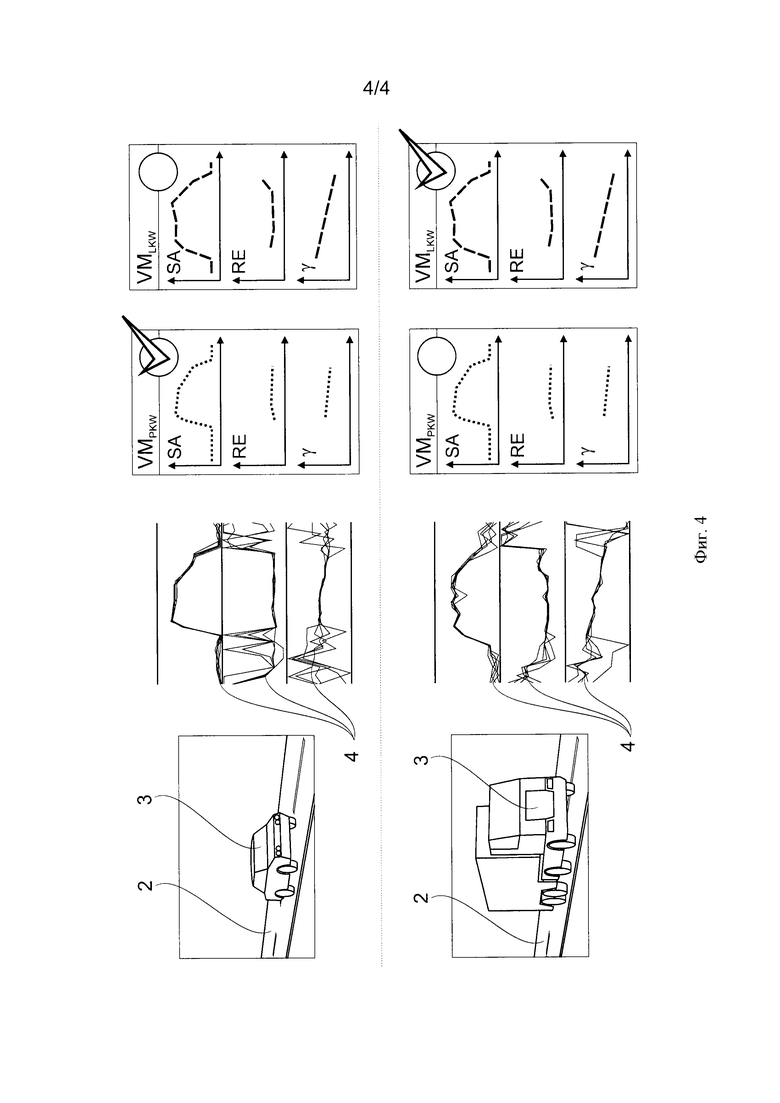
Фиг.4 - пример классификации грузового автомобиля и легкового автомобиля на основе классифицированных сопоставительных моделей.
Для способа классификации одного или также для одновременной классификации нескольких транспортных средств 3, движущихся на дорожном полотне 2, применяется радиолокационный прибор 1 с угловым разрешением, радиолокатор с частотной манипуляцией (ЧМн), особая форма известного из уровня техники радиолокатора с частотно-модулированным непрерывным излучением (ЧМ-НИ). С помощью ЧМ-радиолокатора 1 могут одновременно регистрироваться, а также отслеживаться несколько транспортных средств 3. ЧМн-радиолокатор посылает радиолокационное излучение 11 на по меньшей мере двух чередующихся несущих частотах или принимает вызванные зарегистрированными транспортными средствами 3 отражения по меньшей мере двух чередующихся несущих частот. За счет оценки частотных сдвигов между и внутри обоих отраженных от транспортных средств 3 несущих частот в течение короткого времени обеспечивается возможность пространственного разрешения между несколькими транспортными средствами 3 соответственно их радиальным дальностям RE, радиальным скоростям и целевым углам γ по отношению к радиолокационному прибору 1.
Различные варианты и подходящие для этого устройства для вывода упомянутых параметров из радиолокационных сигналов известны из уровня техники, как, например, описанная в DE 102004040015 В4 планарная антенна с двумя отдельными плоскостями приема.
В зависимости от свойств излучения радиолокационного прибора 1, как показано на Фиг.1, радиолокационное излучение образует исходящий от радиолокационного прибора 1 и расширяющийся радиолокационный конус 12 с осью 13 симметрии. Ориентация радиолокационного прибора 1 и, тем самым, радиолокационного конуса 12 по отношению к дорожному полотну может описываться и устанавливаться на основе ориентации оси 13 симметрии. Радиолокационный конус 12 направлен на дорожное полотно 2 таким образом, что транспортные средства 3 подсвечиваются радиолокационным излучением 11 в удаленном от радиолокационного прибора 1 месте (почти фронтально) и до находящегося вблизи от радиолокационного прибора 1 места (почти сбоку). В удаленном месте транспортное средство 1 входит в радиолокационный конус 12, а в ближнем месте оно снова покидает радиолокационный конус 12.
Испускаемое от радиолокационного прибора 1 радиолокационное излучение 11 отражается от подсвечиваемых радиолокационным излучением 11 и отражающих радиолокационное излучение 11 поверхностей транспортных средств 3, и отраженное радиолокационное излучение 11 вновь регистрируется радиолокационным прибором 1. На основе излученного и отраженного радиолокационного излучения 11 выполняются измерения на транспортных средствах 3. За счет относительного перемещения транспортных средств 3, перемещающихся через радиолокационный конус 12, относительно радиолокационного прибора 1 в отраженном радиолокационном излучении 11 создаются доплеровские сдвиги, из которых радиолокационный прибор 1 генерирует низкочастотные измерительные сигналы 4, которые соответствуют доплеровским сдвигам и регистрируются и оцениваются в форме доплеровских частот fD. Оценка измерительных сигналов 4 посредством соответствующего изобретению способа обеспечивает возможность классификации транспортных средств 3.
Для выполнения способа на первом этапе способа радиолокационный прибор 1 размещается таким образом по отношению к дорожному полотну 2, что могут определяться радиальная скорость, радиальная дальность RE и целевой угол γ от радиолокационного прибора 1 к движущимся транспортным средствам 3. Радиолокационный прибор 1 для этого размещается рядом с дорожным полотном 2, так что ось 13 симметрии с краем 21 дорожного полотна образует горизонтальный острый угол α установки. Кроме того, радиолокационный прибор 1 устанавливается вблизи земли (например, на обычной высоте колесных осей транспортных средств 3) на известной вертикальной высоте vAH установки и с вертикальным углом установки (не показано) оси 13 симметрии относительно поверхности дорожного полотна 2, обычно 0°, так что ось 13 симметрии ориентирована параллельно поверхности дорожного полотна 2.
В одном выполнении способа также возможно радиолокационный прибор 1 размещать непосредственно над дорожным полотном 2, например, на высоте моста над дорожным полотном 2. В этом случае ось 13 симметрии ориентирована параллельно краю 21 дорожного полотна и под вертикальным углом установки к поверхности дорожного полотна 2. Транспортные средства 3 регистрируются, таким образом, в удаленном от радиолокационного прибора 1 месте, почти фронтально, вплоть до расположенного вблизи радиолокационного прибора 1 места, почти сверху.
Измерительные сигналы 4, зарегистрированные радиолокационным прибором 1, выдаются в форме доплеровских частот fD. Из доплеровских частот fD можно непосредственно определять радиальные скорости измеряемых транспортных средств 3.
Для упрощенного пояснения понятий, транспортное средство 3, как показано на Фиг.1, сводится к отраженному сигналу идеального точечного отражателя 33, а радиолокационный прибор 1 рассматривается как точечный источник радиолокационного излучения 11, из которого также исходит ось 13 симметрии радиолокационного конуса 12. Специалисту понятно, что под осью 13 симметрии понимается ось излучения радиолокационного прибора 1, которая проходит параллельно оси приемного блока, к которому привязываются целевые углы γ. Расстоянием между этими осями можно пренебречь, вследствие чего ось 13 симметрии может пониматься как ось радиолокационного прибора 1, к которой могут привязываться как данные для радиолокационного конуса 12, так и целевые углы γ.
Радиальная дальность RE транспортного средства 3 соответствует, таким образом, непосредственному расстоянию от точечного отражателя 33 до точечного источника. Она выводится непосредственно из измерения частотного сдвига между обеими несущими частотами ЧМн-радиолокатора 1.
Радиальная скорость транспортного средства 3 является, таким образом, скоростью, с которой точечный рефлектор 33 в радиальном направлении перемещается к точечному источнику. Радиальная скорость является всего лишь компонентой скорости реальной скорости транспортного средства, с которой транспортное средство движется в направлении 34 движения на дорожном полотне 2. Ввиду расположенного сбоку рядом с дорожным полотном 2 радиолокационного прибора 1, направление 34 движения транспортного средства 3 направлено мимо радиолокационного прибора 1. При векторном рассмотрении скорость транспортного средства можно определить путем суммирования радиально к радиолокационному прибору ориентированной компоненты скорости (радиальной скорости) и ориентированной под прямым углом к ней составляющей скорости (путевой скорости). Радиальная скорость выводится непосредственно из доплеровской частоты fD радиолокационного излучения 11, отраженного от точечного отражателя 33.
В качестве целевого угла γ обозначается угол, который в точечном источнике радиолокационного излучения 11 образован осью 13 симметрии и прямой к точечному рефлектору 33. Определение целевого угла γ осуществляется на основе двух различных сдвигов фаз радиолокационного излучения, излученного из плоскости передатчика, которые измеряются в обеих плоскостях приемника по принципу триангуляционного вычисления.
В противоположность идеальному точечному отражателю 33, транспортное средство 3 имеет пространственную протяженность с множеством пространственно распределенных и отражающих радиолокационное излучение 11 поверхностей, которые в свою очередь образуют множество регистрируемых точечных отражателей 33. В соответствии с этим измерительный сигнал 4, полученный для зарегистрированного транспортного средства 3, имеет также множество доплеровских частот fD. В зависимости от радиального расстояния RE, целевого угла γ и целевого угла ε транспортного средства 3, на транспортных средствах 3 также регистрируются множество пространственно распределенных отражений радиолокационного излучения 11. Число и распределение отражений на транспортных средствах 3 возрастает с уменьшением радиальной дальности RE, так как с точки зрения радиолокационного прибора 1 также увеличиваются размеры отражающих поверхностей транспортных средств 3. Для каждого отдельного из регистрируемых отражений может выводиться радиальная дальность RE, радиальная скорость и целевой угол γ, дифференцированно по их пространственному расположению на поверхностях транспортного средства 3.
На втором этапе способа излучается радиолокационное излучение 11, образующее радиолокационный конус 12. При проезде по меньшей мере одного транспортного средства 3 через радиолокационный конус 12 радиолокационное излучение 11 частично отражается на отражающих поверхностях транспортного средства 3, и отражения регистрируются радиолокационным прибором 1 как измерительные сигналы 4 с соответствующими сигнальными амплитудами SA. Регистрация измерительных сигналов 4 осуществляется во время t измерений в несколько моментов времени измерений.
Для того чтобы создать достаточное отношение сигнал-шум в отношении обусловленных принципом измерений совместно регистрируемых основных шумов измерительных сигналов 4 и повысить однозначность при регистрации измерительных сигналов 4, для сигнальных амплитуд SA рациональным образом устанавливается пороговое значение, которое должны превышать сигнальные амплитуды SA регистрируемых измерительных сигналов 4, чтобы учитываться при последующей обработке сигнала.
На третьем этапе способа измерительные сигналы 4 в форме доплеровских частот fD промежуточным образом сохраняются в ассоциации с моментами времени измерений. Их можно нанести по времени t измерений на временной оси. Все зарегистрированные измерительные сигналы 4 измеряемого транспортного средства 3 можно при этом представить в форме временной характеристики доплеровских частот fD как спектрограмму.
На Фиг.2 представлены спектрограммы, образованные из измерительных сигналов 4 от различных транспортных средств 3. Можно видеть, что спектрограммы имеют характеристические формы, которые могут быть непосредственно ассоциированы с измеряемыми транспортными средствами 3 и различаются по величине транспортных средств 3 в определенных сигнальных областях. Кроме того, измерительные сигналы 4 имеют в спектрограмме различное положение. Так как измеренные доплеровские частоты fD пропорциональны радиальной скорости транспортного средства 3, то измерительные сигналы 4 более быстрых транспортных средств 3 на частотной оси располагаются при более высоких значениях, чем измерительные сигналы 4 более медленных транспортных средств 3. Это различие, однако, не может использоваться для классификации транспортных средств 3, так как теоретически каждое транспортное средство 3 могло бы перемещаться с любой скоростью транспортного средства.
На основе зарегистрированного к самому позднему моменту времени измерений транспортного средства 3 (правая спектрограмма на Фиг.2) для примера будет описана его форма.
Регистрация измерительных сигналов 4 начинается, когда транспортное средство 3 входит в радиолокационный конус 12. вход осуществляется в удаленном от радиолокационного прибора 1 месте, так что транспортное средство 3 почти фронтально регистрируется радиолокационным прибором 1. Поэтому радиолокационное излучение 11 по существу отражается от поверхностей переда 31 транспортного средства 3, который с точки зрения радиолокатора 1 еще очень мал. Поэтому зарегистрированные от этого отраженного радиолокационного излучения 11 доплеровские частоты fD имеют незначительное, еще недифференцированное спектральное распределение, и поэтому измерительные сигналы подобны измерительным сигналам 4 идеального точечного отражателя 33. Поэтому представление измерительных сигналов 4 на спектрограмме показывает при ранних моментах времени измерений начальную область АВ с очень низким спектральным распределением. Так как в удаленном от радиолокационного прибора 1 месте путевая скорость еще очень низкая, то радиальная скорость примерно соответствует скорости транспортного средства. При условии, что транспортное средство 3 во время пересечения радиолокационного конуса 12 движется с постоянной скоростью транспортного средства вдоль дорожного полотна 2, измерительные сигналы 4 остаются в спектрограмме без заметного изменения доплеровских частот fD приближенно постоянными.
Так как направление 34 движения транспортного средства 3 направлено мимо радиолокатора 1, то с уменьшением радиальной дальности RE транспортного средства 3 от радиолокатора 1 радиальная скорость, из-за возрастающей путевой скорости, также снижается. В средней области МВ характеристика измерительных сигналов обнаруживает, прежде всего, небольшую кривизну в направлении меньших доплеровских частот fD с непрерывно возрастающим спадом. При уменьшении радиальной дальности RE также увеличивается, с точки зрения радиолокационного прибора 1, отражающая поверхность транспортного средства 3. Кроме того, транспортное средство 3, при уменьшающейся радиальной дальности RE, образует другой целевой угол γ относительно оси 13 симметрии, так что, наряду с передом 31 транспортного средства, также во все большей степени поверхности бока транспортного средства 3 вносят вклад в отражение радиолокационного излучения 11 и, тем самым, в формирование доплеровских частот fD. Радиолокационный прибор 1 может, таким образом, регистрировать большее количество отражений с большим пространственным рассеянием на поверхностях транспортного средства 3, чем в более ранние моменты времени измерений. Доплеровские частоты fD, которые формируются на различных поверхностях пространственно протяженного транспортного средства 3, имеют, в зависимости от их радиальной дальности RE до радиолокационного прибора 1, различные радиальные скорости. Эти очень малые, но разрешимые с помощью ЧМн-радиолокатора 1 различия в радиальных скоростях или измеряемых доплеровских частотах fD выражаются в спектрограмме в постоянно возрастающем, при уменьшении радиальной дальности RE до радиолокационного прибора 1, расширении спектрального распределения доплеровских частот fD. В конце проезда через радиолокационный конус 12 транспортное средство 3 находится вблизи радиолокационного прибора 1. Целевой угол γ за счет этого становится соответственно большим, так что на транспортном средстве 3 большей частью поверхности бока 32 транспортного средства облучаются радиолокационным излучением 11. Ввиду длины транспортного средства 3, в этом положении достигается максимальное пространственное рассеяние отражений, исходящих от переда 31 транспортного средства 3 и от бока 32 транспортного средства 3. За счет сильно дифференцированного пространственного рассеяния также становятся максимальными различия радиальных скоростей или измеренных доплеровских частот fD. Поэтому в спектрограмме измерительные сигналы 4 показывают в конце средней области МВ, незадолго до выхода транспортного средства 3 из радиолокационного конуса 12 максимально возможное спектральное распределение.
Для представления возрастающего спектрального распределения на Фиг.2 для примера применяются доплеровские частоты от fD1 до fD5, с помощью которых должно наглядно иллюстрироваться множество отражений, регистрируемых на поверхности транспортного средства 3. Временная характеристика измерительных сигналов 4 начинается с доплеровской частоты fD1, которая генерируется на отражающей поверхности вблизи переда транспортного средства 3, и заканчивается доплеровской частотой fD5, которая генерируется на отражающей поверхности в конце бока 32 транспортного средства 3. Между доплеровскими частотами fD1 и fD5 регистрируются другие доплеровские частоты fD2, fD3 и fD4, которые возникают на отражающих поверхностях транспортного средства 3, которые находятся между передом 31 транспортного средства и концом бока 32 транспортного средства. При более ранних моментах времени измерений можно исходить из того, что доплеровские частоты от fD3 до fD5 еще не являются регистрируемыми, так как они возникают на отражениях от бока 32 транспортного средства, который к этим моментам времени измерений для радиолокатора 1 еще является невидимым. При реально зарегистрированных измерительных сигналах 4 в промежутках между доплеровскими частотами fD1 и fD5, наряду с доплеровскими частотами fD2, fD3 и fD4, имеется еще множество других доплеровских частот fD, которые на Фиг.2 для простоты не показаны.
Незадолго до выхода из радиолокационного конуса 12 транспортное средство 3 движется по дорожному полотну 2 мимо радиолокатора 1, так что путевая скорость очень сильно возрастает, а радиальная скорость очень сильно снижается. Спад радиальной скорости в этот момент времени является максимальным. Как только транспортное средство 3 покидает радиолокационный конус 12, никакие отражения более не могут регистрироваться. Поэтому измерительный сигнал 4 имеет конечную область ЕВ, в которой регистрации различных доплеровских частот fD1 и fD5 заканчиваются. Из-за продольной протяженности транспортного средства 3 распределенные по длине транспортного средства 3 отражающие поверхности выходят из радиолокационного конуса 12 последовательно во времени одна за другой, так что в конечной области ЕВ происходит сильное временное разветвление измерительных сигналов 4. Временная протяженность этого разветвления пропорциональна длине транспортного средства 3.
На четвертом этапе способа в спектрограмме определяется область оценки ВВ измерительных сигналов 4, в которой спектральное распределение доплеровских частот fD имеет максимальную ширину полосы. Как можно видеть на Фиг.2, область оценки ВВ, может находиться справа в конце средней области МВ характеристики измерительных сигналов, незадолго перед тем, как транспортное средство 3 начинает покидать радиолокационный конус 12. В области оценки ВВ устанавливается по меньшей мере одна точка измерения в качестве момента tB времени оценки, в который, наряду со всеми определенными доплеровскими частотами fD, считываются или определяются другие выводимые из измерительных сигналов 4 сигнальные компоненты. К таким другим сигнальным компонентам относятся сигнальные амплитуды SA полученных доплеровских частот fD, а также радиальные расстояния RE и целевые углы γ по отношению к пространственно распределенным отражающим поверхностям транспортного средства 3, на которых формировались зарегистрированные доплеровские частоты fD. Сигнальные компоненты затем предоставляются для детальной оценки. Оценка осуществляется для каждой сигнальной компоненты отдельно, за счет того, что соответствующие сигнальные компоненты наносятся и сохраняются как функция по доплеровской частоте fD в соответствующем частотном спектре. Для оценки теперь применяются только участки частотного спектра, в котором содержится требуемая информация. Эти участки перед этим определялись экспериментально. Остальные участки частотных спектров при оценке не требуется дополнительно принимать во внимание.
Детальная оценка может в принципе осуществляться и для более ранних моментов времени измерений, вне области ВВ оценки. Однако ввиду более высокой спектральной плотности, однозначность сигнальных компонентов и, тем самым, надежность оценки там снижается. В более поздние моменты времени измерений, вне области ВВ оценки, детальная оценка более невозможна, так как здесь транспортное средство 3 уже вышло из радиолокационного конуса 12 и, таким образом, более не имеется в распоряжении всех доплеровских частот fD для оценки.
Детальная оценка сигнальных компонентов будет пояснена для случаев, представленных на Фиг.3в-3с.
Для лучшего понимания, на Фиг.3а, прежде всего, представлена оценка сигнальных компонентов идеального точечного отражателя 33. Расположение точечного отражателя 33 относительно радиолокационного прибора 1 представлено на верхнем рисунке в схематичном представлении. Ввиду отсутствия пространственной протяженности, точечный отражатель 33 имеет в момент tB времени оценки (и в случае точечного отражателя 33 также во все другие моменты времени оценки) только одну отражающую радиолокационное излучение 11 поверхность на единственной радиальной дальности RE от радиолокатора 1. Поэтому точечный отражатель 33 генерирует также только одну доплеровскую частоту fD с сигнальной амплитудой SA без спектральной ширины полосы. Кроме того, также может определяться только одна радиальная дальность RE и один целевой угол γ. Поэтому в частотных спектрах радиальной дальности RE и целевого угла γ также представлено соответственно только одно измеренное значение при доплеровской частоте fD.
На Фиг.3b и 3с показана оценка сигнальных компонентов транспортного средства 3. Схематичные представления показывают прямоугольное очертание транспортного средства 3 на виде сверху, которое находится в радиолокационном конусе 12 на приближенно одинаковой радиальной дальности RE, но под различными углами ε транспортного средства 3 (показан только на Фиг.1), которые транспортное средство 3 образует, соответственно, своей продольной осью, совпадающей с направлением движения, и направлением радиальной дальности до радиолокационного прибора. Транспортное средство 3, таким образом, наблюдается радиолокационным прибором 1 под различными углами наблюдения. Такие изменения угла ε транспортного средства возникают при проезде транспортного средства 3 через радиолокационный конус 12.
На Фиг.3b представлены сигнальные компоненты в момент tB времени оценки для транспортного средства 3, продольная ось которого ориентирована под малым углом ε транспортного средства, так что радиолокационное излучение в основном отражается от переда 31 транспортного средства (показано пунктирной линией) и лишь в незначительной части от бока 32 транспортного средства (показано штриховой линией). За счет пространственной протяженности множество пространственно распределенных отражающих поверхностей (отражателей) вносят вклад в формирование измерительных сигналов 4, которые в противоположность точечному отражателю 33, приводят к спектральной ширине полосы в частотных спектрах сигнальных компонентов.
Частотный спектр сигнальных амплитуд SA, то есть функция сигнальных амплитуд SA по доплеровской частоте fD, проявляет два характерных участка. На участке более низкой доплеровской частоты fD частотная характеристика отличается почти линейным нарастанием сигнальных амплитуд SA. Это возрастание может соотноситься с отражениями, формируемыми от переда 31 транспортного средства, так как радиальные скорости, измеренные на сигнале от переда 31 транспортного средства, в противоположность радиальным скоростям, измеренным на сигнале от бока 32 транспортного средства, из-за большей доли путевой скорости, являются меньшими. Максимальные сигнальные амплитуды SA достигаются для угла транспортного средства 3, ориентированного на радиолокационный прибор 1, и его переходов к переду 31 транспортного средства и боку 32 транспортного средства. Здесь доля поверхностей, ориентированных под прямым углом к мысленному радиальному соединению с радиолокационным прибором 1, особенно высока, так что радиолокационное излучение 11 особенно хорошо отражается. От максимума сигнальные амплитуды SA вновь спадают к более высоким доплеровским частотам fD. Спадание сигнальных амплитуд SA создается отражателями (в противоположность углу транспортного средства), менее прямо ориентированных на радиолокационный прибор. Более высокая радиальная скорость приводит, напротив, к уже описанной более высокой спектральной ширине полосы.
Частотный спектр радиальной дальности RE, то есть функция радиальной дальности RE от доплеровской частоты fD, также демонстрирует два характерных участка. На участке более низких доплеровских частот fD радиальная дальность RE почти не изменяется. Этот участок образуется отражениями, сформированными от переда 31 транспортного средства. Так как перед 31 транспортного средства ориентирован почти ортогонально к мысленному радиальному соединению к радиолокационному прибору 1, то для переда 31 транспортного средства не возникает существенных различий в радиальной дальности RE. При переходе от переда 31 транспортного средства к боку 32 транспортного средства радиальные дальности RE возрастают соответственно длине и связанным с этим изменениям целевого угла относительно оси 13 симметрии измеряемого транспортного средства 3. Поэтому на участке более высоких доплеровских частот fD функция демонстрирует возрастание. Частотный спектр на участке возрастания радиальной дальности RE уже, потому что из-за косого угла изменение радиальной скорости меньше. Интенсивность сигнала (отраженного радиолокационного излучения) не имеет никакого влияния на ширину, а влияет только на высоту.
Частотный спектр целевого угла γ, то есть функция целевого угла γ от доплеровской частоты fD, характеризуется линейно спадающим целевым углом γ. Спадание является характерным для длины и ширины транспортного средства 3, которая регистрируется радиолокатором 1 с точки зрения радиолокатора 1 посредством угла ε транспортного средства.
На Фиг.3с еще раз показаны сигнальные компоненты транспортного средства 3. В отличие от представления на Фиг.3b, продольная ось транспортного средства 3 здесь ориентирована под более отвесным углом ε транспортного средства, так что радиолокационное излучение 11 отражается в большей степени от бока 32 транспортного средства (указано штриховой линией) и в меньшей степени от переда 31 транспортного средства (показано точечной линией).
В соответствии с происходящими от переда 31 транспортного средства и от бока 32 транспортного средства частями отражающих поверхностей, вносящих вклад в отражения радиолокационного излучения 11, изменяется также разделение характерных участков на частотные спектры сигнальной амплитуды SA и радиальной дальности RE. При подобной сигнальной характеристике только доля частотного спектра, воспринятого от переда 31 транспортного средства заметно уже, чем доля, воспринятая от бока 32 транспортного средства.
В частотном спектре целевого угла γ частотная характеристика демонстрирует заметно более крутое нарастание целевого угла γ.
Как показывает сравнение частотных спектров при различных углах ε транспортного средства, характеристика оцениваемых сигнальных компонентов является типичной для определенной ориентации и длины транспортного средства 3.
Классификация измеренного транспортного средства 3 осуществляется на пятом этапе способа. Для этого определенные для транспортного средства частотные спектры сравниваются с определенными и сохраненными частотными спектрами на основе моделей транспортных средств, то есть транспортных средств, классификация которых известна, имеющихся в форме сопоставительных моделей VM.
Для того чтобы было возможно прямое сравнение, сопоставительные модели VM сначала обучались с помощью радиолокационного прибора 1, который был так же ориентирован по отношению к дорожному полотну 2, как радиолокационный прибор 1 установлен теперь при выполнении способа, и частотные спектры выводились из измеренных сигналов в момент времени измерений, в который сопоставительная модель VM находилась на такой же радиальной дальности RE. Поэтому сопоставительная модель VM уже имеет соотнесение к некоторому классу транспортных средств. Если устанавливается совпадение измеренного транспортного средства с одной из сопоставительных моделей VM, то измеренное транспортное средство 3 может быть ассоциировано с соответствующим классом транспортных средств. Таким образом, измеренное транспортное средство 3 также классифицируется.
На Фиг.4 представлена классификация транспортных средств 3, различающихся по длине транспортного средства. Выведенные из измерительных сигналов 4 как функции от доплеровской частоты fD частотные спектры сигнальных амплитуд SA, радиальных дальностей RE и целевого угла γ (на Фиг.4 представлены во втором столбце) сравниваются с сопоставительными моделями VM (на Фиг.4 представлены в третьем и четвертом столбцах). На Фиг.4 применяются две сопоставительные модели VM, одна для класса транспортных средств, соответствующего легковым автомобилям (пунктирная линия), и одна для класса транспортных средств, соответствующих грузовым автомобилям (штриховая линия). Сравнение частотных спектров, определенных для транспортного средства 3, показанного в верхней половине Фиг.4, с частотными спектрами сопоставительных моделей VM дает максимальное совпадение с сопоставительной моделью VM легкового автомобиля (третий столбец). Это транспортное средство 3 может, таким образом, классифицироваться как легковой автомобиль. Частотные спектры, определенные для транспортного средства 3, представленного в нижней половине Фиг.4, имеют наибольшее совпадение с сопоставительной моделью VM грузового автомобиля (четвертый столбец). Это транспортное средство 3 может, таким образом, классифицироваться как грузовой автомобиль.
Сопоставительные модели VM предпочтительно вычисляются во время способа с помощью формул, соответственно заданных для разных классов транспортных средств, и текущих параметров, которые получены из установки радиолокационного прибора 1 и измерительных сигналов 4, а именно, радиальных скоростей, радиальных дальностей RE, углов ε транспортного средства и целевых углов γ.
Сопоставительные модели VM могут также формироваться при постоянном расположении радиолокационного прибора 1 относительно дорожного полотна 2, из предварительно полученных характеристик измерительных сигналов 4. Для этого из полученных перед этим характеристик измерительных сигналов 4 сначала определяется длина транспортного средства 3. Длина транспортного средства 3 определяется в конце среднего диапазона МВ характеристики измерительных сигналов 4 из ширины полосы спектрального распределения характеристики измерительных сигналов 4 (например, в момент времени tB оценки), причем большие транспортные средства 3 имеют большую ширину полосы, а короткие транспортные средства 3 - малую ширину полосы.
Также является возможным длину транспортного средства 3 определять в зависимости от радиальной скорости из интервала времени, который требуется транспортному средству 3, чтобы выйти из радиолокационного конуса 12. Интервал времени может определяться в конце характеристики измерительных сигналов 4 из ширины конечной области ЕВ.
Соответственно определенной длине транспортных средств 3 осуществляется, посредством вероятностного подхода, упорядочение ранее полученных или одновременно определенных характеристик измерительных сигналов 4 в различные группы. Путем (ручной) оценки упорядоченных в группы транспортных средств 3 эти группы и, тем самым, включенные в них характеристики измерительных сигналов 4 или транспортные средства 3 ассоциируются с соответствующим классом транспортных средств.
Для создания сопоставительных моделей VM все упорядоченные в группу классифицированные характеристики измерительных сигналов 4 взвешиваются по всей их временной протяженности и накапливаются. В накопленной характеристике измерительных сигналов 4 определяется участок наибольшей спектральной ширины полосы, и там в момент времени tB оценки определяются выводимые сигнальные компоненты (сигнальные амплитуды SA, радиальные дальности RE и целевые углы γ). Полученные из сигнальных компонентов отдельные частотные спектры содержат теперь соответствующий классу транспортных средств усредненный частотный спектр и могут применяться в качестве сопоставительных моделей VM. Для сопоставительных моделей VM при этом достаточно применять только характерные участки, например, нарастания или места перегиба частотных спектров, а остальные участки, как на Фиг.3 показано для частотных спектров радиальной дальности RE и целевого угла γ, маскировать.
Сопоставительные модели VM могут также быть получены из теоретического вычисления. Для этого определяются условия установки (горизонтальное расстояние hAA установки, горизонтальный угол α установки, вертикальная высота vAH установки и вертикальный угол β установки) радиолокационного прибора 1 в реальном месте использования в качестве измерительных сигналов 4. Для представления транспортных средств 3 генерируются упрощенные, в точном масштабе модели транспортных средств (например, поверхности прямоугольной формы). Соответственно условиям установки и моделям транспортных средств, могут рассчитываться теоретические отклики отражения, из которых могут быть получены сопоставительные модели VM.
В принципе способ применим и тогда, когда условия установки радиолокационного прибора 1 относительно дорожного полотна 2 известны не точно, так как в способе применяются исключительно привязанные к радиолокационному прибору 1 измерительные сигналы 4 (доплеровская частота fD, радиальная дальность RE и целевой угол γ). Поэтому радиолокационный конус может ориентироваться по отношению к дорожному полотну 2 с некоторым диапазоном допусков, в котором требуемые измерительные сигналы 4 могут регистрироваться еще с достаточной надежностью. Однако при расположении радиолокационного прибора 1, которое не соответствует условиям установки, при которых была получена сопоставительная модель VM, всегда требуется для применения способа получить сопоставительную модель VM, которая соответствует текущим условиям установки.
Расположение радиолокационного прибора 1 без знания условий установки имеет, кроме того, недостаток, заключающийся в том, что скорость транспортного средства не может быть определена. Тем самым отпадает, например, возможность распознавания нарушений скорости транспортных средств 3 и оценивания их на основе классификации транспортных средств 3. В принципе, условиям установки радиолокационный прибор 1 может обучаться автоматически, так что он может тогда вновь быть использован и для измерения скорости транспортных средств.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1 радиолокационный прибор
11 радиолокационное излучение
12 радиолокационный конус
13 ось симметрии
2 дорожное полотно
3 транспортное средство
31 перед транспортного средства
32 бок транспортного средства
33 точечный отражатель
34 направление движения
4 измерительный сигнал
ВВ область оценки
АВ начальная область
МВ средняя область
ЕВ конечная область
t время измерений
tB момент времени оценки
SA сигнальная амплитуда
RE радиальная дальность
hAA горизонтальное расстояние установки
vAH вертикальная высота установки
fD доплеровская частота
VM сопоставительная модель
α горизонтальный угол установки
γ целевой угол
ε угол транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2292085C1 |
| Способ формирования дальностного портрета, получаемого на основе использования сигналов с перестройкой частоты, от импульса к импульсу, за счет построения характеристики изменения радиальной скорости воздушного объекта | 2023 |
|
RU2815730C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК АКУСТИЧЕСКИХ КОЛЕБАНИЙ, ИЗЛУЧАЕМЫХ ПОДВИЖНЫМ ОБЪЕКТОМ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2050598C1 |
| Способ формирования дальностного портрета повышенной информативности на основе использования сигналов с перестройкой частоты от импульса к импульсу | 2023 |
|
RU2808449C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ МАЛОРАЗМЕРНОГО ВОЗДУШНОГО ОБЪЕКТА В ВИДЕ РАДИАЛЬНОГО УСКОРЕНИЯ ДВИЖЕНИЯ ДЛЯ РЕЖИМА СОПРОВОЖДЕНИЯ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2392640C1 |
Изобретение относится к области радиосвязи. Техническим результатом является повышение надежности классификации движущихся транспортных средств, а также обеспечение возможности одновременно классифицировать несколько транспортных средств. В заявленном способе классификации транспортных средств (3) радиолокационный прибор (1) с угловым разрешением вырабатывает измерительные сигналы (4) с частотами, соответствующими доплеровскому сдвигу (fD), обусловленному измеряемыми транспортными средствами (3), из которых могут быть выведены радиальные дальности (RE), целевые углы (γ) и радиальные скорости. Частоты зарегистрированных измерительных сигналов (4) сохраняются как функции по времени (t) измерений, и из них формируется спектрограмма для каждого транспортного средства (3). Затем спектрограммы проверяются на области (ВВ) оценки с максимальной шириной полосы частоты. Эти области (ВВ) оценки сравниваются с областями оценки сохраненных спектрограмм для различных классов транспортных средств и соотносятся с наиболее сходными, благодаря чему классифицируются измеряемые транспортные средства (3). 3 н. и 2 з.п. ф-лы, 6 ил.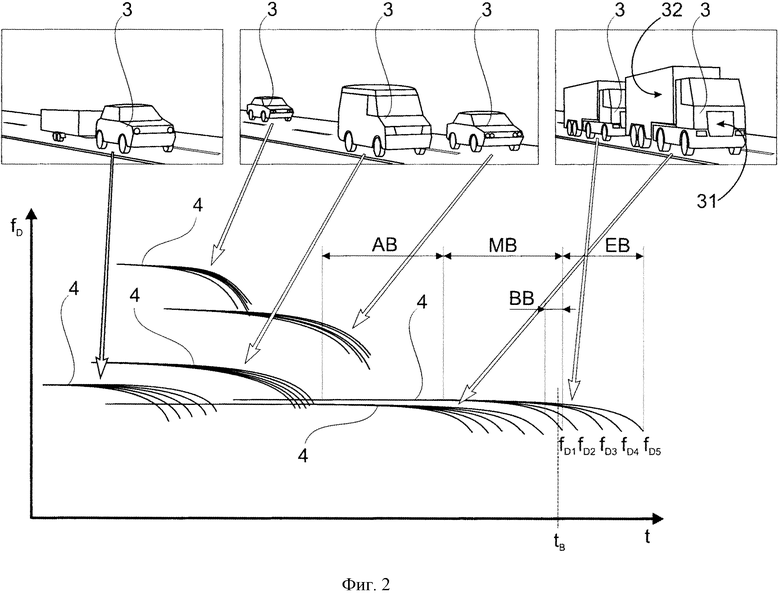
1. Способ классификации транспортных средств (3), при котором транспортные средства (3) при проезде через радиолокационный конус (12), образованный радиолокационным излучением (11), измеряются, при этом поверхности транспортных средств (3), облученные радиолокационным излучением (11), отражают радиолокационное излучение (11) и формируют измерительные сигналы (4) с частотами, соответствующими доплеровскому сдвигу, содержащий следующие этапы способа:
а) расположение радиолокационного прибора (1) с угловым разрешением, который вырабатывает измерительные сигналы (4) с частотами, соответственно доплеровскому сдвигу, из которых могут быть выведены радиальные дальности (RE), целевые углы (γ) и радиальные скорости, на вертикальной высоте (vAH) установки к поверхности дорожного полотна (2), а также под горизонтальным острым углом (α) установки к краю дорожного полотна (2),
b) испускание радиолокационным прибором (1) радиолокационного излучения (11), образующего радиолокационный конус (12), и регистрацию в различные моменты времени измерений во время (t) измерений измерительных сигналов (4) от по меньшей мере одного проезжающего через радиолокационный конус (12) транспортного средства (3),
с) сохранение частот зарегистрированных измерительных сигналов (4) измеряемых транспортных средств (3) как функций по времени (t) измерений и формирование спектрограммы для каждого транспортного средства (3),
d) проверку спектрограмм на области (ВВ) оценки с
максимальной шириной полосы частоты и установление по меньшей мере одного момента времени измерений в качестве момента (tB) времени оценки в области (ВВ) оценки,
е) сравнение этих областей (ВВ) оценки с областями оценки сохраненных спектрограмм для различных классов транспортных средств и соотнесение с наиболее сходными, чтобы тем самым классифицировать проезжающие транспортные средства (3), и
f) вывод целевых углов (γ) из измерительных сигналов (4) к по меньшей мере одному моменту (tB) времени оценки внутри области (ВВ) оценки с максимальной шириной полосы, причем соответственно выведенные целевые углы (γ) для соответствующего момента (tB) времени оценки сохраняются, соответственно, как функция по частоте, и характеристика функции сравнивается с сохраненными для различных классов транспортных средств сопоставительными моделями (VM), чтобы верифицировать классификацию транспортных средств (3).
2. Способ классификации транспортных средств (3), при котором транспортные средства (3) при проезде через радиолокационный конус (12), образованный радиолокационным излучением (11), измеряются, при этом поверхности транспортных средств (3), облученные радиолокационным излучением (11), отражают радиолокационное излучение (11) и формируют измерительные сигналы (4) с частотами, соответствующими доплеровскому сдвигу, содержащий следующие этапы способа:
а) расположение радиолокационного прибора (1) с угловым разрешением, который вырабатывает измерительные сигналы (4) с частотами, соответственно доплеровскому сдвигу, из которых могут
быть выведены радиальные дальности (RE), целевые углы (γ) и радиальные скорости, на вертикальной высоте (vAH) установки к поверхности дорожного полотна (2), а также под горизонтальным острым углом (α) установки к краю дорожного полотна (2),
b) испускание радиолокационным прибором (1) радиолокационного излучения (11), образующего радиолокационный конус (12), и регистрацию в различные моменты времени измерений во время (t) измерений измерительных сигналов (4) от по меньшей мере одного проезжающего через радиолокационный конус (12) транспортного средства (3),
с) сохранение частот зарегистрированных измерительных сигналов (4) измеряемых транспортных средств (3) как функций времени (t) измерений и формирование спектрограммы для каждого транспортного средства (3),
d) проверку спектрограмм на области (ВВ) оценки с максимальной шириной полосы частоты и установление по меньшей мере одного момента времени измерений в качестве момента (tB) времени оценки в области (ВВ) оценки,
е) сравнение этих областей (ВВ) оценки с областями оценки сохраненных спектрограмм для различных классов транспортных средств и соотнесение с наиболее сходными, чтобы тем самым классифицировать проезжающие транспортные средства (3), и
f) вывод радиальных дальностей (RE) из измерительных сигналов (4) к по меньшей мере одному моменту (tB) времени оценки внутри области (ВВ) оценки с максимальной шириной полосы, причем соответственно выведенные радиальные дальности (RE) для соответствующего момента (tB) времени оценки сохраняются,
соответственно, как функция по частоте, и характеристика функции сравнивается с сохраненными для различных классов транспортных средств сопоставительными моделями (VM), чтобы верифицировать классификацию транспортных средств (3).
3. Способ классификации транспортных средств (3), при котором транспортные средства (3) при проезде через радиолокационный конус (12), образованный радиолокационным излучением (11), измеряются, при этом поверхности транспортных средств (3), облученные радиолокационным излучением (11), отражают радиолокационное излучение (11) и формируют измерительные сигналы (4) с частотами, соответствующими доплеровскому сдвигу, содержащий следующие этапы способа:
а) расположение радиолокационного прибора (1) с угловым разрешением, который вырабатывает измерительные сигналы (4) с частотами, соответственно доплеровскому сдвигу, из которых могут быть выведены радиальные дальности (RE), целевые углы (γ) и радиальные скорости, на вертикальной высоте (vAH) установки к поверхности дорожного полотна (2), а также под горизонтальным острым углом (α) установки к краю дорожного полотна (2),
b) испускание радиолокационным прибором (1) радиолокационного излучения (11), образующего радиолокационный конус (12), и регистрацию в различные моменты времени измерений во время (t) измерений измерительных сигналов (4) от по меньшей мере одного проезжающего через радиолокационный конус (12) транспортного средства (3),
с) сохранение частот зарегистрированных измерительных сигналов (4) измеряемых транспортных средств (3) как функций по времени (t) измерений и формирование спектрограммы для каждого транспортного средства (3),
d) проверку спектрограмм на области (ВВ) оценки с максимальной шириной полосы частоты и установление по меньшей мере одного момента времени измерений в качестве момента (tB) времени оценки в области (ВВ) оценки,
е) сравнение этих областей (ВВ) оценки с областями оценки сохраненных спектрограмм для различных классов транспортных средств и соотнесение с наиболее сходными, чтобы тем самым классифицировать проезжающие транспортные средства (3), и
f) сохранение сигнальных амплитуд (SA) измерительных сигналов (4) из измерительных сигналов (4) к по меньшей мере одному из моментов (tB) времени оценки внутри области (ВВ) оценки с максимальной шириной полосы, причем сигнальные амплитуды (SA) измерительных сигналов (4) для соответствующего момента (tB) времени оценки сохраняются, соответственно, как функция по частоте, и характеристика функций сравнивается с сохраненными для различных классов транспортных средств сопоставительными моделями (VM), чтобы верифицировать классификацию транспортных средств (3).
4. Способ по любому из пп. 1, 2, 3, отличающийся тем, что из сравнения всех образованных функций с сохраненными сопоставительными моделями (VM) осуществляется моделирование параметров транспортных средств.
5. Способ по п. 1 или 3, отличающийся тем, что при формировании каждой функции определяется распределение вероятностей для различных параметров транспортных средств, и эти вероятности накапливаются взвешенным образом по всей временной характеристике.
| US20080278366 A1, 13.11.2008 | |||
| US6140954 A, 31.10.2000 | |||
| EP1662272 A1, 31.05.2006 | |||
| Система управления выпрямителем | 1976 |
|
SU674184A1 |
| JIANXIN FANG ET AL, "A Low-cost Vehicle Detection and Classification System based on Unmodulated Continuous-wave Radar", INTELLIGENT TRANSPORTATION SYSTEMS CONFERENCE, 2007, ITSC 2007 | |||
| IEEE, IEEE, PI | |||
| СПОСОБ И СИСТЕМА ПРОВЕРКИ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПУТЕМ РАДИАЦИОННОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2006 |
|
RU2396512C2 |

