Изобретение относится к электротехнике и может быть использовано в системах регулирования частоты вращения, в частности электроприводах с широким диапазоном ее изменения, где в качестве датчика обратной связи используется сельсин, синусно-косинусный вращающийся трансформатор или линейный датчик положения ротора.
Известны аналогичные устройства, относящиеся по принципу действия к астатическим системам регулирования скорости электродвигателя с фазовым управлением: прецизионные привода постоянного тока, прецизионные системы стабилизации скорости двигателей [1, 2]. Недостатки их обусловлены дискретностью фазового регулятора. В области высоких частот эта дискретность мало сказывается на работе электропривода, так как электромагнитная и электромеханическая постоянные времени значительно больше интервала дискретности. Однако в области низких скоростей (0,1-1 об/мин) вал двигателя поворачивается скачкообразно и наблюдаются сбои в работе фазорегулятора.
Наиболее близким к изобретению по своей технической сущности является прецизионная частотно-фазовая система регулирования частоты вращения электродвигателя [3], позволяющая точно отрабатывать заданные частоты в широком диапазоне, особенно в области низких и инфранизких частот вращения. В основе этого устройства лежат принципы фазовой синхронизации и сложения частот, благодаря чему низкочастотные гармонические сигналы датчика положения ротора и задающей частоты переносятся в область высоких частот согласно следующим тригонометрическим выражениям:

где Ωвр - частота вращения ротора электродвигателя, ω0 - несущая повышенная частота, (Ωвр+ω0) - результирующая частота.
Основным недостатком такого устройства является необходимость использования избыточных элементов: для сложения двух частот необходимо четыре умножителя и два сумматора. Как известно, аналоговые умножители имеют большие погрешности и смещения нулевого уровня, что становится критичным при определении фазы результирующего сигнала, а цифровые умножители являются сложными ресурсоемкими устройствами, имеющими определенные временные задержки.
Техническим результатом предлагаемого изобретения является упрощение структуры электропривода и достижение широкого диапазона регулирования и плавного вращения вала двигателя в области низких и инфранизких частот.
Технический результат достигается с помощью применения принципа фазовой синхронизации вкупе с преобразованием частот, основанным на суммировании мгновенных значений пилообразных сигналов задания по углу, сигнала обратной связи с пилообразным сигналом повышенной опорной частоты, отбрасывании целочисленного результата суммирования и выделения дробной части.
Заявляемый способ отличается тем, что преобразуют сигнал управления в пилообразный сигнал заданной частоты вращения, складывают его с пилообразным сигналом повышенной опорной частоты, получают пилообразный сигнал повышенной частоты путем выделения дробной части результата суммирования, из сигнала повышенной пилообразной частоты формируют короткие импульсы, подают их на опорный вход частотно-фазового дискриминатора, гармонические сигналы датчика положения ротора преобразуют в низкочастотный пилообразный сигнал угла, суммируют его с пилообразным сигналом опорной частоты, выделяют дробную часть результата суммирования, из сигнала повышенной пилообразной частоты формируют короткие импульсы, подают их на вход обратной связи частотно-фазового дискриминатора, выходной сигнал частотно-фазового дискриминатора подают на регулятор частоты вращения, который формирует требуемые для реализации заданной частоты вращения токи в фазах электродвигателя.
В случае использования в качестве датчика положения ротора (ДПР) сельсина или вращающегося трансформатора выходные синусно-косинусные сигналы могут быть преобразованы в пилообразный сигнал углового положения ротора с помощью применения арктангенсного преобразования или алгоритма CORDIC[4].
На фиг. 1 представлена обобщенная структурная схема устройства, поясняющего заявляемый способ.
Устройство содержит: формирователь задающей пилообразной частоты (ФЗЧ) 1, генератор опорной пилообразной частоты (ГОЧ) 2; сумматоры 10, 11 с функцией отбрасывания целой части результата суммирования (целой частью являются амплитудное значение входных пил); формирователи импульсов 3, 4; частотно-фазовый дискриминатор (ЧФД) 5; регулятор частоты вращения 6; электродвигатель 8; датчик положения ротора 9; блок, реализующий вычисление кода угла с помощью алгоритма CORDIC или арктангенсного преобразования 7.
Устройство работает следующим образом. На вход ФЗЧ подается сигнал управления Uy, являющийся заданием по частоте вращения двигателя. ФЗЧ преобразует Uy в пилообразный сигнал с частотой Fз, мгновенное значение которого является сигналом задания по углу. Этот сигнал в сумматоре 10 складывается с пилообразным сигналом повышенной частоты ГОЧ F0. Суммарный сигнал повышенной частоты Fз+F0 в формирователе импульсов 3 преобразуется в короткие импульсы частоты fз+f0, значение которой пропорционально входной частоте и количеству импульсов на период пилы. Сигнал fз+f0 поступает на опорный вход ЧФД. Гармонические сигналы ДПР преобразуются блоком CORDIC в низкочастотные пилообразные сигналы Fвр. С помощью сумматора 11 и формирователя импульсов 4 также выделяются импульсы суммарной частоты fвр+f0, поступающие на вход обратной связи ЧФД. Выходной сигнал ЧФД поступает на регулятор частоты вращения электродвигателя.
Принцип сложения частот пилообразных сигналов основан на выражении

где QS(t, τ1, τ2) - результирующая пилообразная функция;  ,
,  - слагаемые пилообразные функции с частотами
- слагаемые пилообразные функции с частотами  ,
,  соответственно; Е1(t) - целочисленная функция Антье. Отображение, описываемое формулой (2), фактически является дробной частью суммы пилообразных функций
соответственно; Е1(t) - целочисленная функция Антье. Отображение, описываемое формулой (2), фактически является дробной частью суммы пилообразных функций  и
и  с различными частотами. При этом частота результирующей функции QS(t, τ1, τ2) будет равна суммарной частоте
с различными частотами. При этом частота результирующей функции QS(t, τ1, τ2) будет равна суммарной частоте  исходных слагаемых функций
исходных слагаемых функций  ,
,  .
.
Для пояснения описанного эффекта суммирования частот на фиг. 2, а, б представлены три пилообразные функции ,
,  , QS(t, τ1, τ2). Частота первой функции в 9 раз выше второй, то есть на один период второй функции укладывается 9 периодов первой. Результирующая функция QS(t, τ1, τ2) представлена на фиг. 2, а более жирной линией, причем очевидно, что на один период второй функции укладывается 10 периодов результирующей суммарной функции, то есть
, QS(t, τ1, τ2). Частота первой функции в 9 раз выше второй, то есть на один период второй функции укладывается 9 периодов первой. Результирующая функция QS(t, τ1, τ2) представлена на фиг. 2, а более жирной линией, причем очевидно, что на один период второй функции укладывается 10 периодов результирующей суммарной функции, то есть  . Как видно на фиг. 2, б, при изменении наклона пилообразной функции
. Как видно на фиг. 2, б, при изменении наклона пилообразной функции  (что соответствует вращению ротора в противоположную сторону) при том же наклоне опорной функции
(что соответствует вращению ротора в противоположную сторону) при том же наклоне опорной функции  результирующая пила имеет 8 периодов на интервале 9τ. Это значит, что
результирующая пила имеет 8 периодов на интервале 9τ. Это значит, что  , то есть из большей частоты вычитается меньшая и наклон у результирующей пилы такой же, как и у пилы с большей частотой.
, то есть из большей частоты вычитается меньшая и наклон у результирующей пилы такой же, как и у пилы с большей частотой.
Отсюда вытекают два свойства рассматриваемой операции: 1) если суммируемые пилообразные функции имеют одинаковые знаки производных на интервале непрерывности, то частоты этих функций суммируются; если разные - то вычитаются; 2) если суммируемые пилообразные функции имеют разные знаки производных на интервале непрерывности, то результирующая пилообразная функция имеет тот же знак производной на интервале непрерывности, что и у функции с большей частотой.
Данная операция может быть легко реализована на цифровом двоичном n-разрядном сумматоре, в котором за счет принципа действия цифровых устройств при сложении двух n-разрядных чисел в случае переполнения старший бит n+1 просто не учитывается. Таким образом, фактически остается лишь n разрядов результата суммы. И если считать n+1 и последующие биты целой частью суммарного числа, то n бит будут являться его дробной частью.
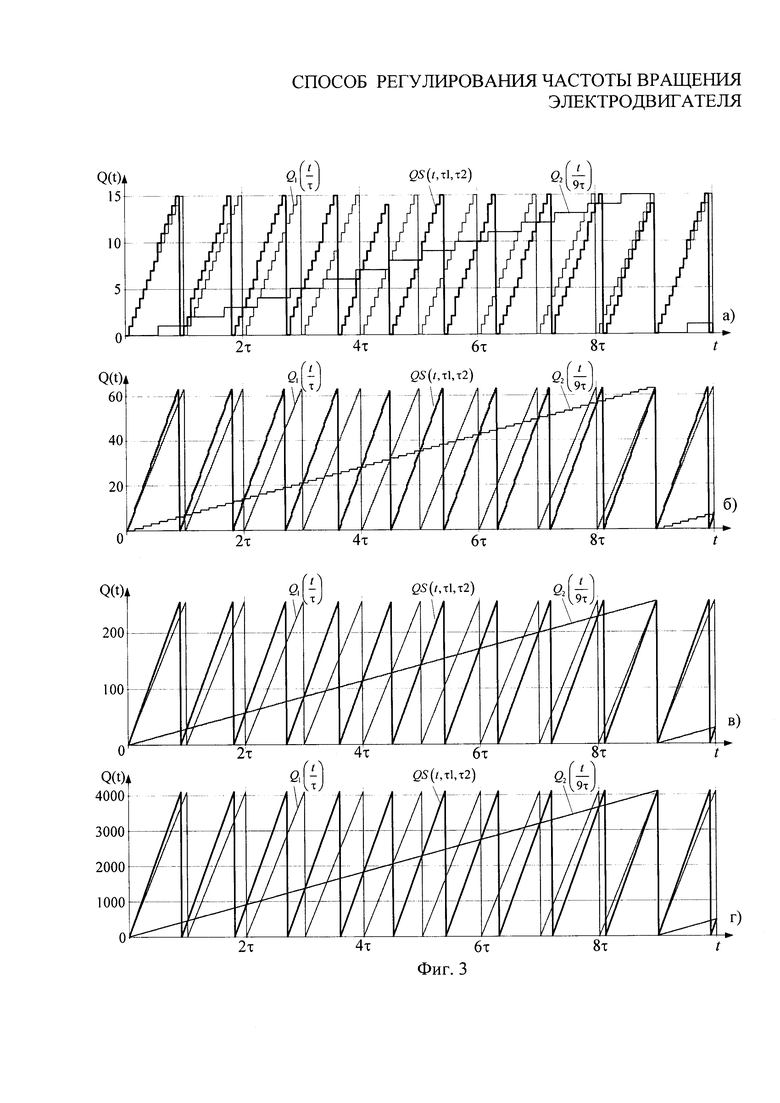
Временные диаграммы работы такого сумматора приведены на фиг. 3. Фиг. 3, а соответствует диаграмме работы 4-разрядного сумматора, фиг. 3, б - 6-разрядного, фиг. 3, в - 8-разрядного, фиг. 3, г - 12-разрядного. Как видно на фиг. 3, увеличением числа разрядов вид таких кусочно-постоянных функций стремится к виду линейных функций, как на фиг. 2, то есть уменьшаются ошибки квантования и апертурные ошибки.
Выделение коротких импульсов производится по результирующим пилообразным сигналам. Количество импульсов на период пилы зависит от требуемой жесткости системы и ограничивается лишь качеством задающего сигнала, сигнала обратной связи и опорной частоты. В качестве таких импульсов может быть использован один из младших разрядов пилы.
Далее функционирование устройства, соответствующее заявляемому способу, не отличается от [3]. Заявляемый способ может быть также использован при проектировании систем управления по ускорению ротора или динамическому моменту двигателя [5].
Литература
1. Трахтенберг P.M. Импульсные астатические системы электропривода с дискретным управлением. - М.: Энергоиздат, 1982. - 168 с.
2. Патент на изобретение РФ №2130688, МПК H02P 5/06,6/18, 20.05.1999. Ивановский государственный энергетический университет, Фалеев М.В., Ширяев А.Н., Киселев А.А., Дьяков В.И.
3. Патент на изобретение РФ №2291552, МПК H02P 6/08, 09.11.2004. ФГУП «НПЦ «Полюс», Муравяткин Ю.Е., Редькин СВ., Авдиевич А.С.
4. Захаров А.В. Алгоритмы CORDIC. Современное состояние и перспективы / А.В. Захаров, В.М. Хачумов // Программные системы: теория и приложения. - 2004. - Т. 26, №6. - С. 353-372.
5. Патент на изобретение РФ №2521617, МПК H02P 7/28. Способ управления динамическим моментом двигателя-маховика / Н.Н. Балковой, Ю.Е. Муравяткин; патентообладатель ОАО "НПЦ "Полюс"; опубл. 10.07.2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2291552C2 |
| Электропривод | 1987 |
|
SU1453569A1 |
| Цифровой формирователь частотно-модулированных сигналов с низким уровнем искажений | 2021 |
|
RU2765273C1 |
| ЦИФРОВОЙ СИНТЕЗАТОР ЧАСТОТ | 2008 |
|
RU2379830C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КВАЗИСИНУСОИДАЛЬНОЕ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ (ВАРИАНТЫ) | 2008 |
|
RU2348100C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ МОМЕНТОМ ДВИГАТЕЛЯ-МАХОВИКА | 2012 |
|
RU2521617C2 |
| ЦИФРОВОЙ СИНТЕЗАТОР ЧАСТОТ | 2009 |
|
RU2416158C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КВАЗИСИНУСОИДАЛЬНОЕ С ВЕКТОРНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2009 |
|
RU2402867C1 |
| Устройство для регулирования скорости электропривода | 1988 |
|
SU1539725A1 |
| Электропривод постоянного тока | 1985 |
|
SU1272452A1 |

Изобретение относится к области электротехники и может быть использовано в системах регулирования частоты вращения, построенных на принципе фазовой синхронизации, в частности электроприводах с широким диапазоном изменения частоты вращения, где в качестве датчика обратной связи используется сельсин, синусно-косинусный вращающийся трансформатор или линейный датчик положения ротора. Технический результат - обеспечение широкого диапазона регулирования и плавного вращения вала электродвигателя в области низких и инфранизких частот и упрощение структуры электропривода при одновременном увеличении точности и снижении затрат компонент на изготовление устройства. В способе регулирования частоты вращения электродвигателя осуществляют суммирование частот пилообразных сигналов задания по углу, сигнала обратной связи с пилообразным сигналом повышенной опорной частоты. Эффект суммирования частот достигается за счет суммирования мгновенных значений пилообразных сигналов, отбрасывания целочисленного результата суммирования и выделения дробной части. 3 ил.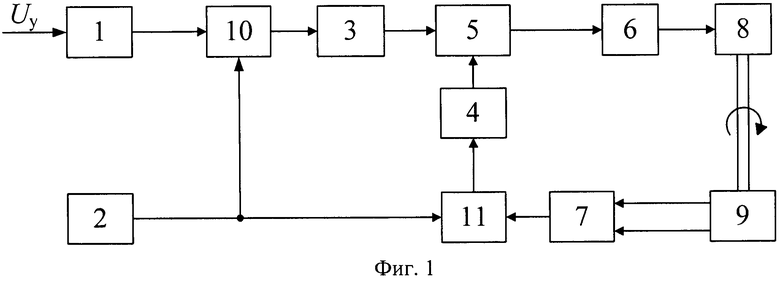
Способ регулирования частоты вращения электродвигателя, заключающийся в том, что преобразуют низкочастотные задающие сигналы и сигналы обратной связи с датчика положения ротора в сигналы повышенной частоты, по разности фаз которых формируют управляющий сигнал для регулирования частоты вращения электродвигателя, отличающийся тем, что преобразуют сигнал управления в пилообразный сигнал заданной частоты вращения, складывают его с пилообразным сигналом повышенной опорной частоты, получают пилообразный сигнал повышенной частоты путем выделения дробной части результата суммирования, из сигнала повышенной пилообразной частоты формируют короткие импульсы, подают их на опорный вход частотно-фазового дискриминатора, гармонические сигналы датчика положения ротора преобразуют в низкочастотный пилообразный сигнал угла, суммируют его с пилообразным сигналом опорной частоты, выделяют дробную часть результата суммирования, из сигнала повышенной пилообразной частоты формируют короткие импульсы, подают их на вход обратной связи частотно-фазового дискриминатора, выходной сигнал частотно-фазового дискриминатора подают на регулятор частоты вращения, который формирует требуемые для реализации заданной частоты вращения токи в фазах электродвигателя.
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2291552C2 |
| ИМПУЛЬСНАЯ ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2342762C1 |
| Окуляр микроскопа | 1986 |
|
SU1363117A1 |
| СПОСОБ И УСТРОЙСТВО ОДНОВРЕМЕННОГО ТОЧНОГО ДЕЛЕНИЯ МГНОВЕННОЙ ЧАСТОТЫ И ТОЧНОГО ВОЗВЕДЕНИЯ В СТЕПЕНЬ ОГИБАЮЩЕЙ ЗВУКОВЫХ СИГНАЛОВ | 1998 |
|
RU2152075C1 |
| JPS 60261386 A, 24.12.1985 | |||
| US 7663328 B2, 16.02.2010 | |||
| Способ подготовки жидкого топлива к сжиганию | 1982 |
|
SU1070383A1 |
| WO 9120123 A1, 26.12.1991. | |||

