Изобретение относится к заготовке леса, в частности для выполнения грузовых переместительных операций, связанных с транспортировкой заготовленной древесины по водной поверхности.
Известна трелевочная каретка для транспортировки древесины, содержащая корпус, электромагнитный тормоз, два опорных шкива, для удержания и перемещения по несущему канату за счет собственной массы и силы инерции, а также тягово-возвратный канат для подъема груза и перемещения каретки на разгрузочный пункт (Патент США 7246712 В2, В66С 21/00, опубликованный 24.07.2007).
Недостатком конструкции является отсутствие автономного двигателя, что исключает возможность самопередвижения по несущему канату, исходя из этого каретка может работать только на подъем древесины по склону за счет использования тягово-возвратного каната. Конструкция каретки не предусмотрена для эксплуатации над водной поверхностью с целью перемещения древесины.
Наиболее близкой по технической сущности и достигаемому результату является конструкция каретки с использованием основного силового и одного опорного шкивов, предназначенных для удержания и перемещения каретки по несущему канату с помощью привода автономного двигателя (Патент США 5020443, В61В 12/00, опубликованный 4.06.1991).
Однако в конструкции каретки не предусмотрены механизмы контроля и предупреждения ослабления несущего каната, а также система, обеспечивающая защиту от перекоса и закусывания каната, что важно при транспортировке древесины по водной поверхности.
Технической задачей, на решение которой направлено заявленное изобретение, является обеспечение безаварийной работы трелевочного цикла, в процессе перемещения транспортно-грузовой каретки по несущему канату, расположенному над водной поверхностью. Работа данной установки сопряжена с периодическим изменением натяжения несущего каната за счет колебательных процессов, вызванных действиями ветра и подвижностью водной поверхности, на которой расположена древесина, удерживаемая и перемещаемая с помощью транспортно-грузовой каретки.
Поставленная задача достигается тем, что транспортно-грузовая каретка, имеющая канатоведущий шкив и автономный двигатель для перемещения по несущему канату, где согласно изобретению в базовой конструкции автоматизированной транспортно-грузовой каретки предусмотрены датчики, выполняющие роль контроля и предупреждения ослабления несущего каната при прохождении его через подвижные элементы трелевочной каретки, при этом сигналы от датчиков контроля поступают на систему опорных шкивов, вертикальное положение которых меняется за счет использования автоматических электромеханизмов, получающих команды от датчиков контроля и выполняющих функцию натяжения или ослабления несущего каната; во избежание перекоса и закусывания несущего каната в канавке канатоведущего шкива автоматизированная транспортно-грузовая каретка снабжена разделяющими пластинами, которые располагаются под определенным углом и не позволяют канату, находясь в петлевом положении, соприкасаться.
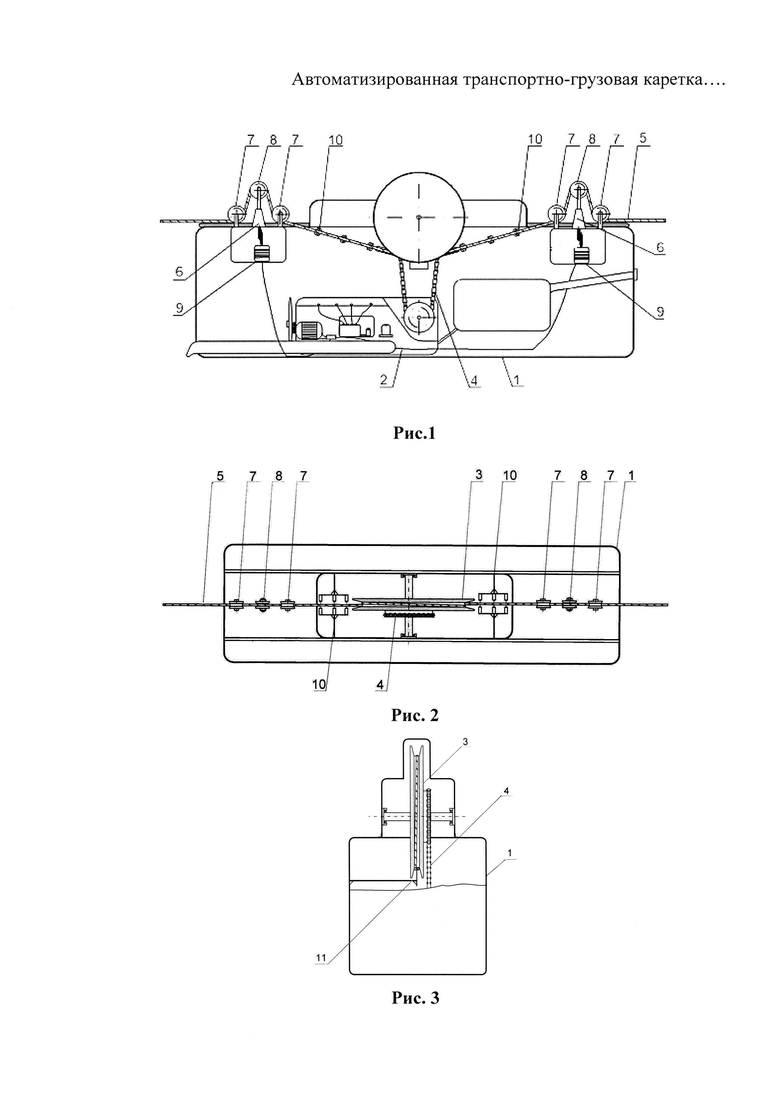
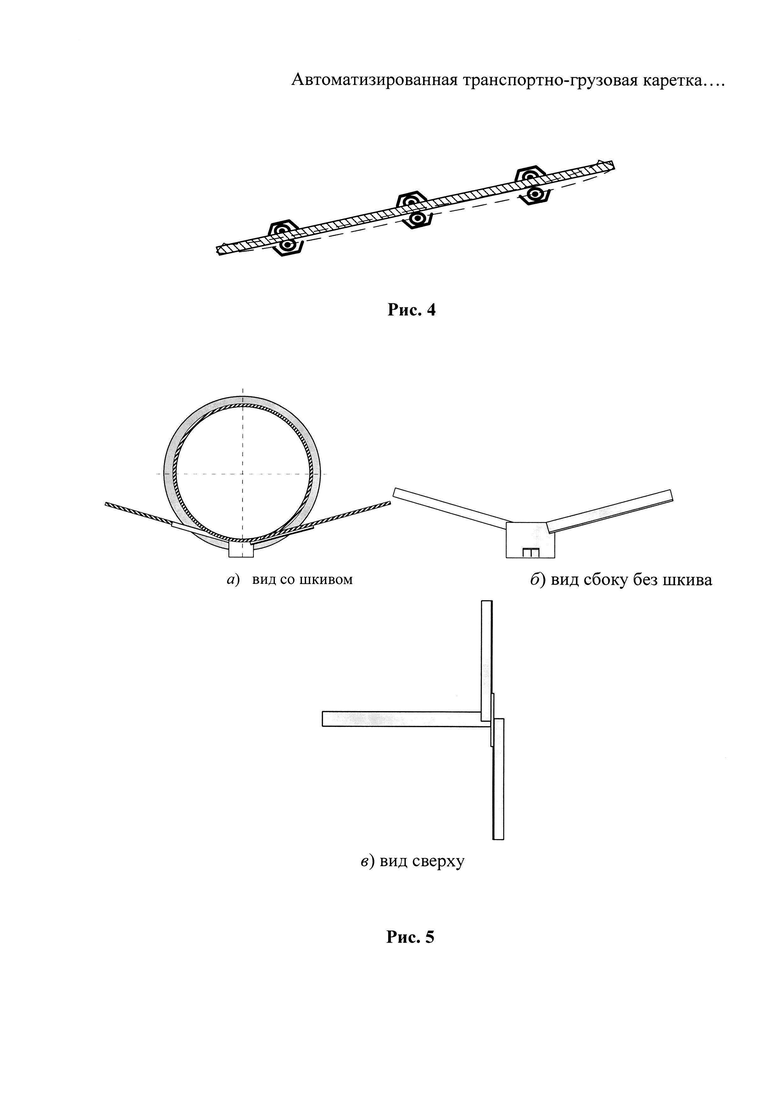
Сущность изобретения поясняется чертежами, где на рис. 1 - общий вид сбоку; рис. 2 - приведен общий вид сверху; рис. 3 - общий вид спереди; рис. 4 - принцип работы датчиков контроля; рис. 5 - разделяющиеся пластины.
Устройство и работа базовой конструкции автоматизированной транспортно-грузовой каретки заключается в следующем.
Трелевочная каретка представлена корпусом 1, внутри которого находится двигатель 2, являющийся приводом для канатоведущего шкива (КВШ) 3, расположенного в верхней центральной части корпуса. Крутящий момент от двигателя на КВШ передается с помощью цепной передачи 4.
Канатоведущий шкив предназначен для удержания под напряжением несущего каната 5, который образует на нем петлеобразное соединение, благодаря которому вращающийся КВШ обеспечивает перемещение каретки по несущему канату, который в свою очередь дополнительно проходит через систему управляемых опорных шкивов 6. Система управляемых опорных шкивов расположена на одной линии с КВШ и предназначена для оптимального натяжения в автоматизированном режиме, обеспечивающего плотное и равномерное петлеобразование.
Оптимальное натяжение обеспечивается за счет двух нижних опорных шкивов 7 и одного центрального опорного шкива 8, который имеет возможность выдвижения вверх за счет червячного электромеханизма 9, тем самым меняя натяжение несущего каната. Оперативная команда для работы червячного электромеханизма обеспечивается комплексом сигналов, поступающих от датчиков контроля 10, которые располагаются вдоль несущего каната внутри корпуса каретки и реагируют на ослабление несущего каната 5.
Во избежание перекоса и перетирания несущего каната 5 в месте петлеобразования канатоведущий шкив 3 снабжен разделяющими пластинами 11, которые располагаются под определенным углом и не позволяют канату, находясь в петлевом положении, соприкасаться.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разделяющийся грузозахватный механизм нисходящего типа движения | 2015 |
|
RU2651813C2 |
| СИСТЕМА НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ГРУЗОЗАХВАТНОГО МЕХАНИЗМА ДЛЯ АЭРОСТАТНО-КАНАТНОЙ СИСТЕМЫ ТРЕЛЕВКИ | 2013 |
|
RU2531319C1 |
| АЭРОСТАТНО-КАНАТНАЯ СИСТЕМА ДЛЯ ВОЗДУШНОЙ ЗАГОТОВКИ И ТРАНСПОРТИРОВКИ ДРЕВЕСИНЫ | 2012 |
|
RU2499706C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ДРЕВЕСИНЫ С ИСПОЛЬЗОВАНИЕМ НАДУВНЫХ ПЛАВАЮЩИХ ОПОР | 2013 |
|
RU2531649C1 |
| Способ разработки лесосеки канатной лесотранспортной системой | 2019 |
|
RU2719701C1 |
| КАНАТНАЯ ТРЕЛЕВОЧНАЯ УСТАНОВКА | 1990 |
|
RU2009919C1 |
| КАНАТНАЯ ТРЕЛЕВОЧНАЯ УСТАНОВКА | 1972 |
|
SU412047A1 |
| МЕХАНИЗМ НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ГРЕЙФЕРНОГО ЗАХВАТА ДЛЯ ВОЗДУШНЫХ СИСТЕМ ТРЕЛЕВКИ | 2013 |
|
RU2531322C1 |
| Канатная трелевочная установка | 1983 |
|
SU1152838A1 |
| Канатная трелевочная установка | 1975 |
|
SU540757A2 |
Изобретение относится к заготовке леса, в частности для выполнения грузовых переместительных операций связанных с транспортировкой заготовленной древесины по водной поверхности. Транспортно-грузовая каретка содержит канатоведущий шкив и автономный двигатель для перемещения по несущему канату и систему опорных шкивов. Система опорных шкивов снабжена управляемым центральным опорным шкивом, который имеет возможность выдвижения вверх за счет червячного электромеханизма, тем самым меняя натяжение несущего каната в автоматизированном режиме для оптимального натяжения каната. В транспортно-грузовой каретке предусмотрены датчики, выполняющие роль контроля и предупреждения ослабления несущего каната при прохождении его через подвижные элементы трелевочной каретки, при этом сигналы от датчиков контроля поступают на систему опорных шкивов, вертикальное положение которых меняется за счет использования автоматических электромеханизмов, получающих команды от датчиков контроля и выполняющих функцию натяжения или ослабления несущего каната. Работа данной установки сопряжена с периодическим изменением натяжения несущего каната за счет колебательных процессов, вызванных действиями ветра и подвижностью водной поверхности, на которой расположена древесина, удерживаемая и перемещаемая с помощью транспортно-грузовой каретки. Изобретение обеспечивает безаварийную работу в процессе перемещения транспортно-грузовой каретки по несущему канату, расположенному над водной поверхностью. 2 з.п. ф-лы, 5 ил.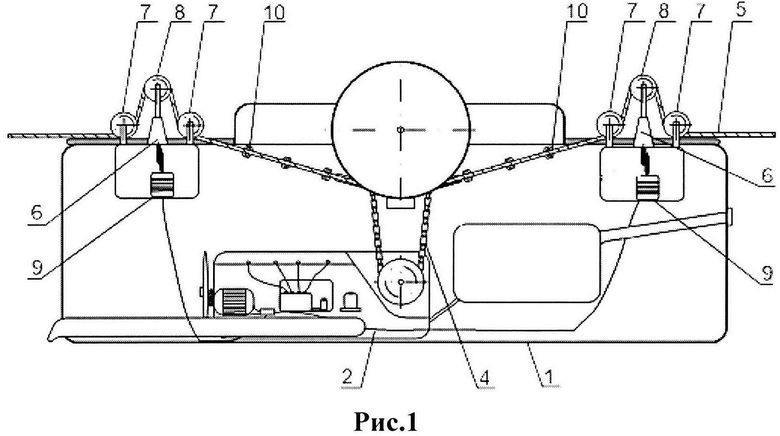
1. Автоматизированная транспортно-грузовая каретка, содержащая канатоведущий шкив, автономный двигатель для перемещения по несущему канату и систему опорных шкивов, отличающаяся тем, что система опорных шкивов снабжена управляемым центральным опорным шкивом, который имеет возможность выдвижения вверх за счет червячного электромеханизма, тем самым меняя натяжение несущего каната в автоматизированном режиме для оптимального натяжения каната.
2. Автоматизированная транспортно-грузовая каретка по п. 1, отличающаяся тем, что оперативная команда для работы червячного электромеханизма обеспечивается комплексом сигналов, поступающих от датчиков контроля, которые располагаются вдоль несущего каната внутри корпуса каретки и реагируют на ослабление несущего каната.
3. Автоматизированная транспортно-грузовая каретка по п. 2, отличающаяся тем, что во избежание перекоса и перетирания несущего каната в месте петлеобразования канатоведущий шкив снабжен разделяющими пластинами, которые располагаются под определенным углом и не позволяют канату, находясь в петлевом положении, соприкасаться.
| Моноканатная подвесная транспортная установка | 1981 |
|
SU998184A1 |
| JP H07257375 A, 09.10.1995 | |||
| JP H04328068 A, 17.11.1992 | |||
| Устройство для измельчения | 1977 |
|
SU634785A1 |
| Каретка канатной установки | 1988 |
|
SU1640002A1 |
| СПОСОБ КОНТРОЛЯ ЛОГИЧЕСКИХ СХЕМ | 0 |
|
SU198409A1 |
| JP H04078764 A,12.03.1992 | |||
| US 5020443 A, 05.09.2012. | |||

