ОБЛАСТЬ ТЕХНИКИ
Заявленное изобретение относится к способу управления железнодорожным (ЖД) переездом, в частности сигнализацией, устанавливаемой в зонах пересечения дорог движения автотранспорта с ЖД переездами, предупреждающей приведение в действие устройств, блокирующих проезд автотранспорта.
УРОВЕНЬ ТЕХНИКИ
В настоящее время, закрытие переезда определяется длиной участка приближения и максимальной скоростью подвижной единицы, без использования предсказателя времени закрытия переезда такое управление неоптимально.
Известен способ управления закрытием переезда (патент US 8297558, 30.10.2012), который заключается в использовании устройства для предсказания времени приближения поезда к переезду. Данное решение построено на базе системы интервального регулирования поездов, однако, скорость поезда определяется исключительно по показанию светофора, имеется в виду цветовое показание загоревшейся лампы, зеленый, желтый, красный и различные комбинации в зависимости от типа системы интервального регулирования движения поездов и проходного светофора. Показания проходного светофора меняются в зависимости от состояния рельсовой цепи, находящейся впереди, на следующем блок-участке. Так, существующая система интервального регулирования поездов ограничивает скорость следования поезда по блок-участку (рельсовой цепи) изменением показания светофора. Любая система интервального регулирования поездов использует проходной светофор для ограничения скорости проследования поезда или его полной остановки. Ограничения скорости предписываются внутренними нормами железной дороги. Например, для трехзначной блокировки существуют нормы: зеленый - проезд блок-участка без снижения скорости, с максимально разрешенной на данном участке, желтый - проезд блок-участка со скоростью не более 60 км/ч (свободен один блок-участок), красный - полная останова перед светофором. Используя показания проходного светофора, а также показания системы автоматической локомотивной сигнализации (АЛС), рассчитывает задержку закрытия для переезда.
Недостатком данного решения является то, что рассчитанные заранее задержки времени ограничены количеством показаний светофора, т.е. если есть три показания светофора, то есть три значения времени задержки закрытия переезда. Известная система использует показания проходного светофора, а также показания системы АЛС которые связанны со скоростью поезда только косвенно. Непосредственно скорость поезда не контролируется.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является устранение существующих недостатков, при определении действительной скорости ЖД состава для точного расчета времени активации сигнализации на переезде и его закрытия.
Техническим результатом является повышение точности определения времени приближения поезда к переезду и снижение времени простоя автотранспорта при блокировке ЖД переезда.
Заявленный технический результат достигается с помощью способа управления закрытием ЖД переезда с помощью устройства предсказания времени задержки включения сигнализации переезда (УПВЗС), связанного со средствами автоматической переездной сигнализации, который содержит этапы, на которых:
- получают на входе УПВЗС первичные параметры аналоговой рельсовой цепи, содержащие показания напряжения U и силы тока I на питающем конце рельсовой линии;
- определяют эталонные параметры времени задержки закрытия переезда рельсовой линии для каждого контрольного участка, содержащие эталонные показания U и I для упомянутого контрольного участка, на основании обработки полученных первичных параметров;
- сохраняют в памяти УПВЗС упомянутые эталонные параметры;
- определяют с помощью УПВЗС изменение параметров рельсовой линии на выбранном контрольном участке, для чего осуществляют выделение характерных признаков, описывающих состояние рельсовой линии;
- определяют положение, направление и скорость подвижного состава на выбранном контрольном участке рельсовой линии с помощью обработки упомянутых первичных параметров;
- формируют вторичные параметры, содержащие данные о вычисленной фактической скорости и направлении подвижного состава на контрольном участке рельсовой линии;
- осуществляют сравнение полученных вторичных параметров с эталонными параметрами для выбранного участка рельсовой линии;
- на основании выполненного сравнения определяют величину координаты закрытия переезда,
и
на основании полученной координаты осуществляют активацию автоматических средств переездной сигнализации.
В частном варианте осуществления заявленного решения при получении эталонных параметров вычисляют устанавливают взаимную связь токов и напряжений с параметрами линии r, L, С и g.
В другом частном варианте характерными признаками рельсовой линии является определение наличия или отсутствия подвижного состава на участке рельсовой линии. В качестве признака занятости рельсовой линии может выступать повышение напряжения на входе УПВЗС.
В другом частном варианте скорость и направления движения подвижного вычисляется по скорости изменения тока I в рельсовой линии на участке контроля.
В другом частном варианте на этапе сравнения вторичных параметров с эталонными параметрами определяют скорость изменения фактических показателей напряжения U и силы тока I по сравнению с эталонными на контролируемом участке рельсовой линии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует общие этапы способа согласно заявленному изобретению.
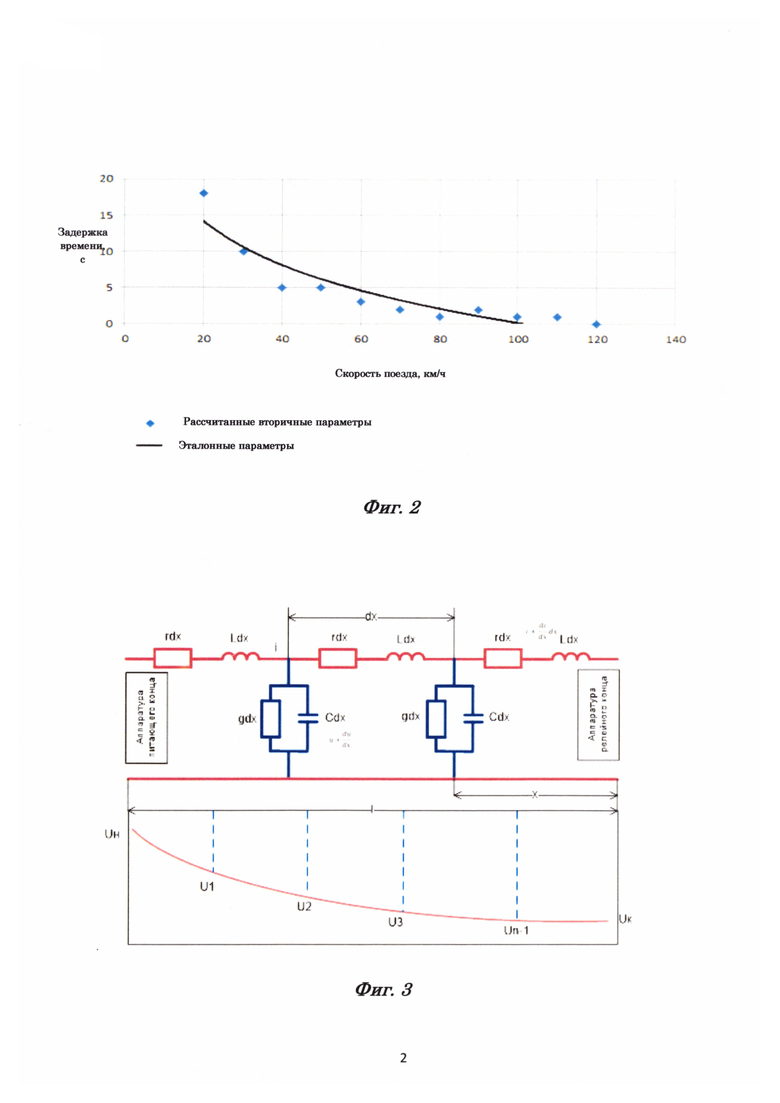
Фиг. 2 иллюстрирует пример анализа данных времени задержки.
Фиг. 3 иллюстрирует схему замещения рельсовой цепи.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 представлен общий ход выполнения этапов заявленного способа. Анализ параметров аналоговой рельсовой цепи (рельсовые цепи постоянного тока, импульсные, тональные) и их изменения, позволяет определить положение подвижной единицы на блок-участке, а также скорость подвижной единицы. Принцип действия аналоговой рельсовой цепи предполагает воздействие колесной пары на рельс. Оценка скорости и положения поезда на участке базируется на анализе баланса мощностей и их изменениях. Аналоговая рельсовая цепь представляет собой распределенную электрическую линию. Первичные параметры рельсовой цепи, такие как  ,
,  ,
,  ,
,  устанавливают взаимную связь токов и напряжений с параметрами линии r, L, С и g, и позволяют определить напряжения U и токи I в произвольной координате при любой длине рельсовой линии в зависимости от значений напряжений и токов в начале или в конце ее.
устанавливают взаимную связь токов и напряжений с параметрами линии r, L, С и g, и позволяют определить напряжения U и токи I в произвольной координате при любой длине рельсовой линии в зависимости от значений напряжений и токов в начале или в конце ее.
Вследствие равномерного распределения сопротивления рельсов и существующей утечки тока через балласт, изменения величины тока I и напряжения U вдоль рельсовой линии происходит не прямолинейно, а по закону гиперболической функции.
На этапе 101 с помощью УПВЗС, связанного со средствами автоматической переездной сигнализации, получают на вход первичные параметры аналоговой рельсовой цепи, содержащие показания напряжения U и силы тока I на питающем конце рельсовой линии. Изменения состояния рельсовый линии (первичные параметры , , , ) поступают в УПВЗС, где происходит их предварительная обработка, направленная на вычисление (предсказание) времени прибытия ЖД состава.
На этапе 102 определяют эталонные параметры времени задержки закрытия переезда рельсовой линии для каждого контрольного участка, содержащие эталонные показания U и I для упомянутого контрольного участка, на основании обработки полученных первичных параметров. Далее на этапе 103 полученные эталонные параметры сохраняются в памяти УПВЗС.
На этапе 104 выполняется определение изменений параметров рельсовой линии на выбранном контрольном участке, для чего осуществляют выделение характерных признаков, описывающих состояние рельсовой линии, для чего осуществляется обработка первичных данных и выделение характерных признаков, описывающих состояния рельсовой линии. Под состояниями рельсовой линии подразумевается, свободна или занята рельсовая линия единицей подвижного состава. А также определения направления движения отцепа на контролируемом участке. Одним из характерных признаков занятости рельсовой линии является повышение напряжения на входе вычислительного блока УПВЗС.
На этапе 105 по скорости изменения тока в рельсовой линии определяют скорость, положение и направление движения подвижного состава. При нахождении рельсовой линии участка приближения в шунтовом режиме, вычислительный блок УПВЗС определяет координаты и скорость поезда на участке приближения, а также его направление. Далее на этапе 106 УПВЗС производит вычисление вторичных параметров, содержащих данные о вычисленной фактической скорости и направлении подвижного состава на выбранном контрольном участке рельсовой линии.
На этапе 107 УПВЗС использует заранее определенные эталонные параметры для конкретного участка рельсовой цепи и производит сравнение упомянутых эталонных параметров тока I и напряжения U, а также скорость их изменения со вторичными параметрами, поступившими от контролируемой рельсовой линии. На Фиг. 2 показан пример отображения данных с помощью обработки вычисленных параметров на контрольном участке с эталонными параметрами.
Для любого участка рельсовой линии поступающие параметры (ток, напряжение) будут отличаться по причине совокупности различных факторов (Фиг. 3):
- длина участка;
- величина утечки тока и напряжения через балластный слой;
- общего технического состояния рельсовой линии;
- типа используемого рельса;
- от количества токопроводящих стыковых соединителей;
- и др.
На этапе 108 на основании выполненного сравнения определяют величину координаты закрытия переезда и на основании полученной координаты осуществляют активацию автоматических средств переездной сигнализации.
Общий принцип действия УПВЗС, а также способа, использующего его, основывается на предсказании времени закрытия переезда, заключающемся в обработке поступившей информации от рельсовой цепи и ее последующем сравнении с заранее рассчитанными значениями времени задержки закрытия переезда относительно неизменной длины участка приближения и скорости приближения подвижной единицы.
Описанные в настоящей заявке предпочтительные варианты настоящего изобретения не должны являться ограничением для иных, частных вариантов осуществления заявленного технического решения, не выходящих примерами реализации за рамки изложенных настоящих материалов, которые должны быть понятны специалистам в данной области техники, на которых рассчитано заявленное решение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАКРЫТИЯ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2016 |
|
RU2632544C2 |
| СИСТЕМА ВЫЧИСЛЕНИЯ ВРЕМЕНИ ЗАДЕРЖКИ ЗАКРЫТИЯ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2016 |
|
RU2619507C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2018 |
|
RU2681451C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2021 |
|
RU2761960C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2011 |
|
RU2487037C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИСТЕМОЙ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2019 |
|
RU2732685C1 |
| Способ управления автоматической переездной сигнализацией | 2016 |
|
RU2628042C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2011 |
|
RU2492091C2 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2521066C1 |
| СИСТЕМА УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2756140C1 |

Изобретение относится к области железнодорожной автоматики и телемеханики. В способе получают параметры аналоговой рельсовой цепи, содержащие показания напряжения U и силы тока I на питающем конце рельсовой линии; определяют эталонные параметры времени задержки закрытия переезда, на основании обработки полученных первичных параметров; сохраняют в памяти упомянутые эталонные параметры; определяют изменение параметров на выбранном контрольном участке, для чего осуществляют выделение характерных признаков, описывающих состояние рельсовой линии; определяют положение, направление и скорость подвижного состава. Затем формируют вторичные параметры, содержащие данные о вычисленной фактической скорости и направлении подвижного состава на контрольном участке рельсовой линии; осуществляют сравнение полученных вторичных параметров с эталонными параметрами для выбранного участка. Причем на основании сравнения определяют величину координаты закрытия переезда, а на основании полученной координаты осуществляют активацию автоматических средств переездной сигнализации. Достигается повышение точности определения времени приближения поезда к переезду. 5 з.п. ф-лы, 3 ил.
1. Способ управления закрытием ЖД переезда с помощью устройства предсказания времени задержки включения сигнализации переезда (УПВЗС), связанного со средствами автоматической переездной сигнализации, содержащий этапы, на которых:
- получают на входе УПВЗС первичные параметры аналоговой рельсовой цепи, содержащие показания напряжения U и силы тока I на питающем конце рельсовой линии;
- определяют эталонные параметры времени задержки закрытия переезда рельсовой линии для каждого контрольного участка, содержащие эталонные показания U и I для упомянутого контрольного участка, на основании обработки полученных первичных параметров;
- сохраняют в памяти УПВЗС упомянутые эталонные параметры;
- определяют с помощью УПВЗС изменение параметров рельсовой линии на выбранном контрольном участке, для чего осуществляют выделение характерных признаков, описывающих состояние рельсовой линии;
- определяют положение, направление и скорость подвижного состава на выбранном контрольном участке рельсовой линии с помощью обработки упомянутых первичных параметров;
- формируют вторичные параметры, содержащие данные о вычисленной фактической скорости и направлении подвижного состава на контрольном участке рельсовой линии;
- осуществляют сравнение полученных вторичных параметров с эталонными параметрами для выбранного участка рельсовой линии;
- на основании выполненного сравнения определяют величину координаты закрытия переезда,
и
на основании полученной координаты осуществляют активацию автоматических средств переездной сигнализации.
2. Способ по п. 1, отличающийся тем, что при получении эталонных параметров вычисляют, устанавливают взаимную связь токов и напряжений с параметрами линии r, L, С и g.
3. Способ по п. 1, отличающийся тем, что характерными признаками рельсовой линии является определение наличия или отсутствия подвижного состава на участке рельсовой линии.
4. Способ по п. 3, отличающийся тем, что в качестве признака занятости рельсовой линии может выступать повышение напряжения на входе УПВЗС.
5. Способ по п. 1, отличающийся тем, что скорость и направления движения подвижного вычисляется по скорости изменения тока I в рельсовой линии на участке контроля.
6. Способ по п. 1, отличающийся тем, что на этапе сравнения вторичных параметров с эталонными параметрами определяют скорость изменения фактических показателей напряжения U и силы тока I по сравнению с эталонными на контролируемом участке рельсовой линии.
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2005 |
|
RU2281219C1 |
| Устройство для автоматического ограждения переезда | 1986 |
|
SU1342796A1 |
| ЦИФРОВАЯ ЖЕЛЕЗНОДОРОЖНАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ПОЕЗДОВ, ПРИБЛИЖАЮЩИХСЯ К ПЕРЕЕЗДУ | 2004 |
|
RU2342274C2 |
| US 2011095139 A1, 28.04.2011. | |||

