Изобретение относится к железнодорожной автоматике и телемеханике, а именно к системам ограждения переезда, позволяющим закрывать переезд в зависимости от координаты, скорости и ускорения приближающегося поезда.
Известен способ управления автоматической переездной сигнализацией, реализованный в устройстве, в котором на участке приближения к переезду устанавливаются дискретные датчики, которые срабатывают при определенной скорости поезда и через интегратор воздействуют на исполнительный элемент, позволяющий обеспечить закрытие переезда именно в то время, которое необходимо для безопасного въезда железнодорожного подвижного состава на переезд (Авторское свидетельство СССР №1684148 А1, кл. В 61 L 29/22, опубл. БИ №38, 1991 г. Устройство для переездной сигнализации, Л.Б.Чубарев, В.Н.Яковлев, Ю.И.Полевой, А.С.Лосьев).
Недостатком способа является низкая пропускная способность переездов ввиду дискретности изменения скорости поезда на участке приближения и преждевременного закрытия ограждающих устройств.
Известен также способ управления автоматической переездной сигнализацией, реализованный в устройстве (Авторское свидетельство СССР №1342796 А1, кл. В 61 L 29/32, опубл. БИ №37, 1987 г. Устройство для автоматического ограждения переезда, Е.Г.Угрюмов, Ю.А.Бакулин, Ю.А.Ерохин), в котором на питающем конце в рельсовую линию подаются зондирующие импульсы и по времени поступления отраженных импульсов от колесной пары поезда вычисляется скорость и координата поезда и принимается решение о закрытии переезда.
Недостатком способа является невозможность электромагнитной совместимости зондирующих импульсов с существующим сигналом рельсовой цепи, а также невозможность контроля ускорения поезда, что приводит к необходимости предусмотрения дополнительной длины рельсовой линии участка приближения для учета возможности ускорения поезда на участке приближения, и, следовательно, способу присуща низкая пропускная способность переездов.
Данное техническое решение выбрано автором в качестве прототипа.
Техническим результатом, на достижение которого направлено данное изобретение, является повышение пропускной способности переездов за счет обеспечения минимального времени закрытого состояния переездов во всем диапазоне скоростей и ускорения поезда, путем непрерывного измерения фактической скорости подвижного состава и учета максимального его ускорения на участке приближения.
В основе способа управления переездными ограждающими устройствами лежит минимальность времени закрытого состояния переездов. Для этого непрерывно контролируют координату, скорость поезда на участке приближения, и с учетом возможного его ускорения вычисляют координату закрытия переезда, и по ним управляют ограждающими устройствами переезда. Координату и скорость переезда определяют по значению уравнения координаты переезда, аргументами в которой являются измеренные значения амплитуд напряжения и тока на питающем конце рельсовой цепи участка приближения.
Технический результат достигается тем, что в рельсовую линию на питающем конце непрерывно подают сигнал переменного тока и на том же конце непрерывно измеряют амплитуду напряжения и тока, предварительно измеряют амплитуду напряжения и тока при различных значениях координаты расположения поезда от релейного до питающего конца рельсовой линии и формируют множество измеренных значений напряжения U1, тока I1 и соответствующих им координат поезда хn, с помощью которых составляют систему уравнений координаты расположения поезда, правую часть которой приравнивают к значениям координат поезда хn и, решая систему уравнений

где χni - координаты расположения поезда, при которых измерены U1ij и I1ij,
определяют коэффициенты Сn уравнения координаты поезда, затем, измеряя текущее значение напряжения и тока, определяют текущую координату поезда на участке приближения
а затем скорость поезда на участке определяют по формуле

где хni - текущая координата поезда,
xn(i-1) - предыдущая координата, пройденная поездом за время Δt,
и с учетом возможного его ускорения, определяют по формуле фактическую координату закрытия переезда

где lyn - длина участка приближения к переезду,
 - время, необходимое для закрытия переезда (табличное значение),
- время, необходимое для закрытия переезда (табличное значение),
аi - ускорение движения поезда на участке приближения, вычисляемое по кривой скорости поезда для конкретного переезда.
Применение представленных операций дает следующие возможности достижения поставленной задачи:
- обеспечивается непрерывное определение координаты и скорости поезда посредством предложенного уравнения координаты поезда
где С= С1÷Сn - априорно определенные, решением системы, коэффициенты уравнения координаты поезда;
f(U1, I1) - ортогональный полином, позволяющий интерполировать
кривую координаты поезда;
U1 и I1 - аргументы ортогонального полинома - текущие, измеряемые информационные признаки, зависящие от координаты поезда;
- обеспечивается непрерывное определение скорости поезда посредством вычисления изменения координаты поезда за фиксированное время
где хni - текущая координата поезда,
xn(i-1) - предыдущая координата, пройденная поездом за время
Δt=(ti-ti-1);
- обеспечивается непрерывное определение координаты закрытия переезда, с учетом возможного ускорения поезда на участке приближения

где lyn - длина участка приближения к переезду,
- время, необходимое для закрытия переезда (табличное значение),
аi - ускорение движения поезда на участке приближения, вычисляемое по кривой скорости поезда.
На фиг.1 показана функциональная схема примера реализации предлагаемого способа управления автоматической переездной сигнализацией.
На фиг.2 изображена блок-схема алгоритма работы автоматической переездной сигнализации.
На фиг.3 представлены временные интервалы функционирования системы.
На фиг.4 изображены кривые зависимости времени закрытого состояния переезда от скорости поезда на участке приближения.
Способ может быть реализован, как, например, в устройстве, содержащем источник питания 1, вход которого подключен к сети переменного тока, выход которого через датчик тока 2 - к устройству согласования аппаратуры питающего конца 5 рельсовой линии 6 и к первому входу вычислительно-логического блока, ко второму входу которого подсоединен выход датчика тока 2, причем выход вычислительно-логического блока подсоединен к входу схемы управления автоматической переездной сигнализацией 4, а выход устройства согласования аппаратуры питающего конца подсоединен к рельсовой линии участка приближения 6, к релейному концу которой через устройство согласования аппаратуры релейного конца 7 подсоединен приемник рельсовой цепи 8.
Способ осуществляется следующим образом.
При вступлении поезда на участок приближения включается система непрерывного определения скорости и координаты поезда, которое предусматривает непрерывное измерение амплитуды напряжения U1 и тока I1 на питающем конце рельсовой линии. Эта информация поступает в решающее устройство, которое по формуле  вычисляет фактическую координату нахождения поезда на участке приближения к переезду, затем скорость поезда на участие по формуле:
вычисляет фактическую координату нахождения поезда на участке приближения к переезду, затем скорость поезда на участие по формуле:
с учетом возможного его ускорения, определяет фактическую координату закрытия переезда

где lyn - длина участка приближения к переезду,
t3 n - время, необходимое для закрытия переезда, которое зависит от типа переезда и таблично задается (В.Д.Бубнов, B.C.Дмитриев. Устройства СЦБ их монтаж и обслуживание: Полуавтоматическая и автоматическая блокировка. М.: Транспорт, 1989. - С.304),
а1 - ускорение движения поезда на участке приближения, вычисляемое по кривой скорости поезда для конкретного переезда (A.M.Бабичков П.А.Гурский, А.П.Новиков. Тяга поездов и тяговые расчеты. М.: Транспорт, 1971. - С.280).
В качестве функции напряжения и тока в уравнении координаты поезда f(U1, I1) используют ортогональные многочлены Лежандра, Лагерра, Эрмита, Лорана или степенной полином Колмогорова-Габора. Коэффициенты Сi÷Сn - предварительно определяют следующим образом.
Априорно измеряют амплитуды напряжения и тока на питающем конце рельсовой линии в зависимости от координат нахождения поезда и формируют массив данных в виде
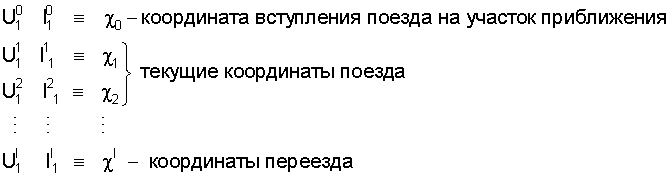
где l - длина рельсовой линии участка приближения.
По полученным данным составляют систему уравнений координаты поезда в виде

и, решая систему, как, например, методом Гаусса, определяют искомые коэффициенты Сi-Сn, которые формируют уравнение координаты поезда. Данный прием широко применяется при интерполяции функций для получения интерполяционного уравнения процессов (И.Н.Бронштейн, К.А.Семендяев. Справочник по математике. - М.: Наука, 1980 - 976 с.).
Информация о координате хn, скорости νn непрерывно поступает в схему управления автоматической переездной сигнализацией, которая в зависимости от скорости, ускорения и координаты поезда вычисляет координату и время закрытия переезда и по алгоритму (фиг.2), включает переездные ограждающие устройства:
шаг 1: фиксируется момент вступления поезда на участок приближения (t0, l0) (фиг.3);
шаг 2: измеряют значения напряжения U1 и тока I1 на питающем конце рельсовой цепи участка приближения;
шаг 3: по уравнению координаты поезда определяют его фактическую координату хn и скорость поезда νn;
шаг 4: проверяют условие νф<νmax, если «нет», то констатируется факт равенства νф=νmax на участке (т.к. νф не может быть больше νmax), и с координаты l1 или времени t1 закрывают шлагбаум;
шаг 5: если имеет место условие «да», то проверяют ускорение: если скорость увеличивается, то также шлагбаум закрывают с координаты l1 или времени t1;
шаг 6: если скорость уменьшается, то с координаты l1 до l2 или времени t1 до t2 корректируется задержка времени включения шлагбаума (tp=t3-t1). Если скорость νф=νmax, то шлагбаум закрывают в момент времени t1, а т.к. скорость большая, то излишнего времени на ожидание нет (tp=30-40 с). Если минимальная νф=νmin, то и время закрытого состояния переезда небольшое от t2 до t3 (tp=t2-t3);
шаг 7: если скорость поезда νф<νmax, но постоянна, также вычисляют координату, с которой производят закрытие переезда, и время закрытого состояния переезда tp также небольшое.
Из анализа графиков (фиг.4) следует, что время закрытого состояния переезда - переменная величина и в диапазоне малых скоростей существенно сокращается (почти в 5 раз). Разработанный способ управления переездной сигнализацией наиболее эффективно при фактической скорости движения поезда по участку приближения до 70 км/ч (при длине рельсовой линии участка приближения 1500 м) и до 100 км/ч (при длине рельсовой линии участка приближения 2500 м).
Применение предполагаемого способа управления автоматической переездной сигнализацией обеспечивает по сравнению с существующими следующие технико-экономические преимущества:
- обеспечивается минимальность времени закрытого состояния переезда от скорости поезда на участке приближения за счет непрерывного измерения скорости и координаты поезда;
- экономия электроэнергии за счет небольшого времени включенного состояния ограждающих устройств переезда;
- повышается безопасность движения поездов благодаря незначительному времени простоя автотранспорта перед закрытым переездом и исключения объезда закрытого шлагбаума водителями автотранспорта;
- улучшается экологическая обстановка в зоне переездов из-за малого времени простоя автотранспорта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления автоматической переездной сигнализацией | 2016 |
|
RU2628042C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИСТЕМОЙ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2019 |
|
RU2732685C1 |
| Устройство управления автоматической переездной сигнализацией | 2016 |
|
RU2651379C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2018 |
|
RU2681451C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2000 |
|
RU2169678C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2013 |
|
RU2544285C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2011 |
|
RU2487037C2 |
| СИСТЕМА ЗАКРЫТИЯ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2016 |
|
RU2632544C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2021 |
|
RU2761960C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАКРЫТИЕМ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2015 |
|
RU2610903C1 |



Изобретение относится к железнодорожной автоматике, а именно к системам ограждения переезда, позволяющим закрывать переезд в зависимости от координаты, скорости и ускорения приближающегося поезда. Способ заключается в том, что в рельсовую линию на питающем конце непрерывно подают сигнал переменного тока и на том же конце непрерывно измеряют амплитуду напряжения и тока. Предварительно измеряют амплитуду напряжения и тока при различных значениях координаты расположения поездного шунта от релейного до питающего конца рельсовой линии. Формируют множество измеренных значений напряжения U1, тока I1 и соответствующих им координат поезда xn, с помощью которых составляется система уравнений координаты расположения поезда, правую часть которой приравнивают к значениям координат поезда xn, и, решая систему уравнений, определяют коэффициенты Сn уравнения координаты поезда. Измеряя текущее значение напряжения и тока, определяют текущую координату поезда на участке приближения. Определяют скорость поезда на участке, а затем, с учетом возможного ускорения поезда, определяют фактическую координату закрытия переезда. Техническим результатом изобретения является повышение пропускной способности переездов за счет обеспечения минимального времени закрытого состояния переездов во всем диапазоне скоростей и ускорения поезда. 4 ил.
Способ управления автоматической переездной сигнализацией, заключающийся в том, что в рельсовую линию на питающем конце непрерывно подают сигнал переменного тока и на том же конце непрерывно измеряют амплитуду напряжения и тока, отличающийся тем, что предварительно измеряют амплитуду напряжения и тока при различных значениях координаты расположения поездного шунта от релейного до питающего конца рельсовой линии и формируют множество измеренных значений напряжения U1, тока I1 и соответствующих им координат поезда xn, с помощью которых составляется система уравнений координаты расположения поезда, правую часть приравнивают к значениям координат поезда xn и, решая систему

где xni - координаты расположения поезда, при которых измерены U1ij и I1ij;
определяют коэффициенты Сn уравнения координаты поезда, затем, измеряя текущее значение напряжения и тока, определяют текущую координату поезда на участке приближения

скорость поезда на участке определяют по формуле

где xni - текущая координата поезда,
xn(i-1) - предыдущая координата, пройденная поездом за время Δt,
с учетом возможного его ускорения определяют фактическую координату закрытия переезда по формуле:

где lyn - длина участка приближения к переезду,
 - время, необходимое для закрытия переезда (табличное значение),
- время, необходимое для закрытия переезда (табличное значение),
ai - ускорение движения поезда на участке приближения, вычисляемое по кривой скорости поезда.
| Устройство для автоматического ограждения переезда | 1986 |
|
SU1342796A1 |
| Устройство для переездной сигнализации | 1989 |
|
SU1684148A1 |
| Способ управления процессом производства окатышей | 1981 |
|
SU1011717A1 |
| Устройство для определения параметров движения рельсовых транспортных средств | 1991 |
|
SU1791255A1 |

