Изобретение относится к области судостроения и, в частности, касается усовершенствования быстроходных судов, обеспечивает ускоренный выход судна на режим глиссирования и повышает устойчивость при движении на скорости.
Известны быстроходные суда, у которых для изменения угла дифферента во время движения с целью преодоления горба сопротивления, достижения максимального гидродинамического качества или снижения перегрузок при движении на волнении используют управляемые транцевые плиты (Справочник по малотоннажному судостроению. - Л.: Судостроение, 1988, - 576 с., см. с. 278-280). Недостатком таких судов является то, что транцевые плиты должны быть достаточно больших размеров и иметь мощный быстродействующий привод для их отклонения.
Известны также устройства, состоящие из транцевой плиты, закрепленной шарнирно к транцевой части судна, и интерцептора, шарнирно закрепленного как к транцевой части судна, так и к транцевой плите (заявка US №2010/0101475, МПК В63В 1/22, Патент RU №2396180, МПК В63В 1/20, 2010 год). Устройства оборудованы автоматически управляемыми кормовыми интерцепторами с возможностью выдвижения вниз по дуге из-за заднего среза транцевой плиты или днища редана с помощью исполнительного механизма в виде следящего привода по сигналам системы управления интерцепторами.
Недостатками данных устройств является то, что выдвижение интерцептора и транцевой плиты осуществляется электроприводом, что требует наличия электропитания на борту судна и значительно сужает сферу применения данного устройства, а также то, что в них интерцептор не является самостоятельной частью - он привязан к конкретной конструкции судна и не обладает универсальностью.
Кроме того, известно устройство для регулирования балансировки и/или рулевого управления лодки, корабля или гидросамолета (международная заявка WO 2013068515, МПК В63В 39/06, опубл. 16.05.2013 г.), содержащее силовой привод, приводное устройство и нож интерцептора, который посредством приводного устройства и механических соединительных элементов имеет возможность линейного перемещения между двумя крайними положениями (убранным и выпущенным ножом интерцептора). Устройство является наиболее близким аналогом изобретения и выбрано в качестве прототипа. Недостатком упомянутого устройства являются сложность конструкции, малая ремонтопригодность и зависимость от источника электрического питания.
Задачей и техническим результатом предлагаемого изобретения является разработка гидродинамического интерцептора, обеспечивающего повышение гидродинамических характеристик и предназначенного для установки на любых типах лодок, содержащего устройство управления и упрощающего процесс монтажа/демонтажа.
Решение поставленной задачи и технический результат изобретения достигаются тем, что в гидродинамическом интерцепторе, содержащем устройство управления, основание, нож, привод, к основанию прикреплены направляющие, предназначенные для линейного перемещения по ним ножа, на ноже закреплены магниты, ответные к ним магниты закреплены на основании, устройство управления выполнено с возможностью фиксации ножа интерцептора в промежуточном положении.
Кроме того, направляющие, предназначенные для линейного перемещения ножа интерцептора, выполнены из фторопласта, а магниты, закрепленные на ноже интерцептора и на основании, выполнены из неодима.
Предлагаемое изобретение поясняется чертежами
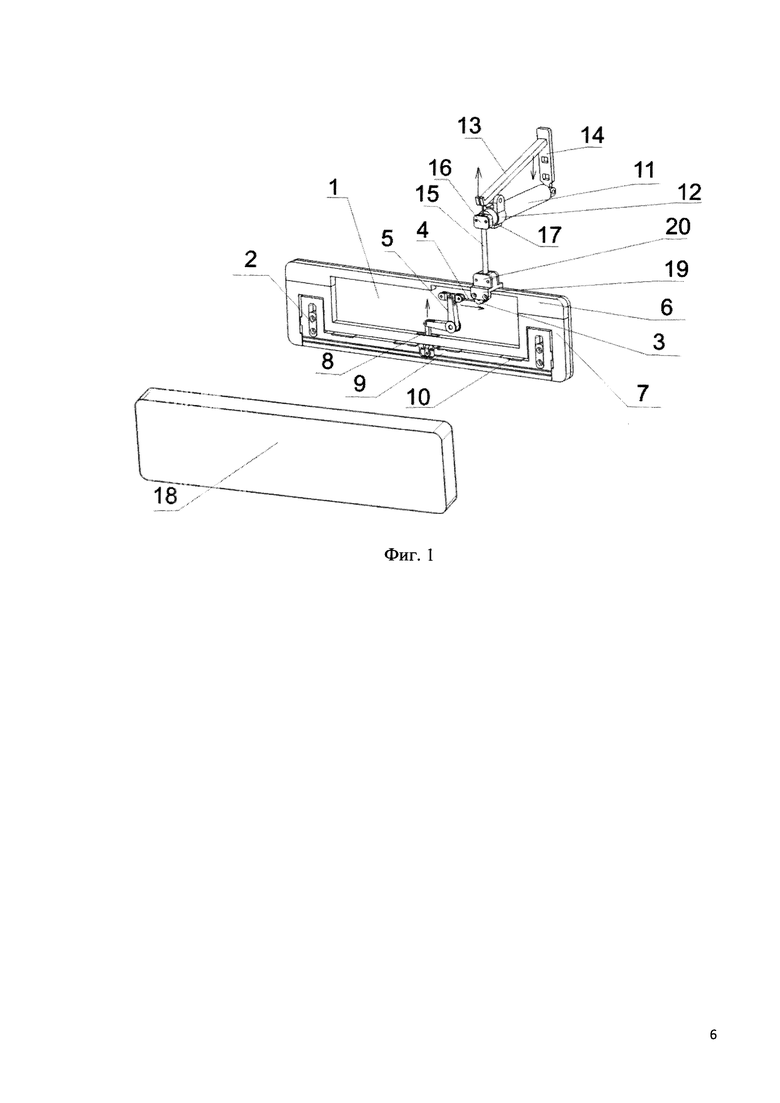
На фиг. 1 приведен общий вид гидродинамического интерцептора с ручным приводом
Гидродинамический интерцептор представляет собой основание 1 с посадочными местами и присоединительными отверстиями, установленное в корпусе (не показано). На основании 1 закреплены фторопластовые направляющие 2, предназначенные для линейного перемещения по ним между двумя крайними положениями (убранным и выпущенным) ножа гидродинамического интерцептора, ролик 3 со стальным тросиком 4, качалка 5, рамка верхняя 6, рамка основная 7. Тяга 8 гидродинамического интерцептора присоединена к ножу 9 механическим крепежом. Основное рабочее тело интерцептора - нож 9, с закрепленными на нем неодимовыми магнитами 10. Ответные магниты (не показаны) закреплены в основной рамке на основании таким образом, что основание и нож интерцептора находятся под взаимным отталкивающим усилием. Положение ножа определяется фиксирующими выступами на торцах ножа и направляющими 2. Устройство управления содержит ролик 3 со стальным тросиком 4 в жесткой оплетке 15, качалку 5, ручку управления, состоящую из основания 11, хомута 12, рычага 13, подпружиненного фиксатора 14, регулирующего положение ножа гидродинамического интерцептора с возможностью его линейного перемещения. Жесткая оплетка 15 стального тросика 4 зафиксирована крышкой 16 в корпусе фиксатора 17 тросика. Ручка управления интерцептором представляет собой, таким образом, рычаг, предназначенный для вытягивания тросика из жесткой оплетки на необходимую длину. После фиксации свободного конца тросика 4 к качалке 5 конструкция интерцептора закрывается внешней крышкой 18. На корпус интерцептора прикреплен фиксатор 19 тросика 4. Жесткая оплетка 15 тросика 4 зафиксирована с обеих сторон крышками 20.
Гидродинамический интерцептор работает следующим образом:
Чтобы убрать нож внутрь корпуса интерцептора, необходимо переместить рычаг управления 13, закрепленный на хомуте 17, в нижнее положение. Меньшее плечо ручки управления переместится относительно верхней площадки детали 16 вверх, вытаскивая тросик проводки 4 из жесткой оплетки 15. Тросик потянет за собой качалку управления 5, отклоняя ее на угол, равный выбранному ходу ножа интерцептора. Ручка управления имеет три положения, соответствующие убранному положению ножа интерцептора, положению ножа, выпущенному на 5 мм, и положению ножа, выпущенному на 10 мм, относительно корпуса интерцептора. Рычаг управления фиксируется подпружиненным фиксатором 14, имеющим прорези для остановки рычага. Конструкция ножа и проводки сделана таким образом, что нож 9 под действием магнитов 10 находится в выдвинутом положении и останавливается за счет ручки управления. Если нож 9 находится в корпусе интерцептора, то выдвинуть его можно путем механического сбрасывания подпружиненного фиксатора 14 с ручки управления 13.
При использовании интерцептора на судне, где установлен источник электрического тока, возможно изменение конструкции гидродинамического интерцептора для установки электрического привода управления положением ножа гидродинамического интерцептора.
Конструкция устройства универсальна. Возможна эксплуатация в механическом варианте управления и варианте с электроприводом, подходит для установки для любых типов лодок с электропитанием и без него. Кроме этого, для использования данного устройства не требуется укрепление конструкции транца. Помимо этого, процесс монтажа/демонтажа и ремонта значительно упрощен.
Как показали испытания, гидродинамический интерцептор позволяет снизить сопротивление лодки на режиме глиссирования до 30%, более чем в 2 раза уменьшить угол дифферента и полностью устранить дельфинирование.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2096240C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108260C1 |
| БЫСТРОХОДНОЕ СУДНО | 2009 |
|
RU2396180C1 |
| БЫСТРОХОДНОЕ СУДНО | 1998 |
|
RU2136534C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108259C1 |
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2163553C1 |
| БЫСТРОХОДНОЕ СУДНО | 1997 |
|
RU2127689C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108258C1 |
| БЫСТРОХОДНОЕ СУДНО | 2008 |
|
RU2386567C1 |
| БЫСТРОХОДНОЕ СУДНО | 1988 |
|
SU1837522A1 |
Изобретение относится к области судостроения и, в частности, касается усовершенствования быстроходных судов, обеспечивает ускоренный выход судна на режим глиссирования и повышает устойчивость при движении на скорости. Предложен гидродинамический интерцептор, содержащий устройство управления, основание, нож, привод, к основанию прикреплены направляющие, предназначенные для линейного перемещения по ним ножа, на ноже закреплены магниты, ответные к ним магниты закреплены на основании, устройство управления выполнено с возможностью фиксации ножа интерцептора в промежуточном положении. Предлагаемый гидродинамический интерцептор позволит снизить сопротивление лодки на режиме глиссирования до 30%, более чем в 2 раза уменьшить угол дифферента и устранить дельфинирование. 2 з.п. ф-лы, 1 ил.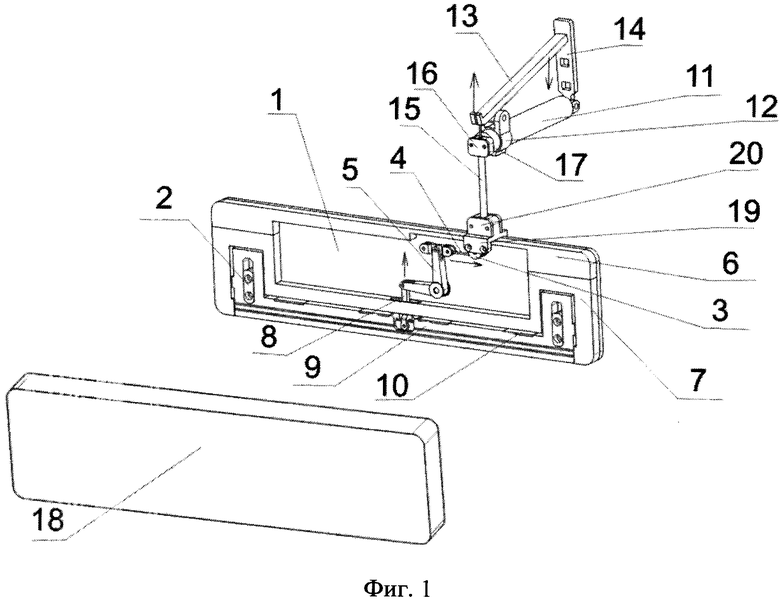
1. Гидродинамический интерцептор, содержащий устройство управления, основание, нож, привод, отличающийся тем, что к основанию прикреплены направляющие, предназначенные для линейного перемещения по ним ножа, на ноже закреплены магниты, ответные к ним магниты закреплены на основании, устройство управления выполнено с возможностью фиксации ножа интерцептора в промежуточном положении.
2. Гидродинамический интерцептор по п. 1, отличающийся тем, что направляющие, предназначенные для линейного перемещения ножа интерцептора, выполнены из фторопласта.
3. Гидродинамический интерцептор по п. 1, отличающийся тем, что магниты, закрепленные на ноже интерцептора и на основании, выполнены из неодима.
| US 8622012 B2, 07.01.2014 | |||
| Комплексная микропроцессорная система мониторинга и управления дуговой защитой и комплектными распределительными устройствами | 2019 |
|
RU2703279C1 |
| US 6006689 A, 28.12.1999 | |||
| WO 2013068515 A1, 16.05.2013 | |||
| СПОСОБ ПОЛУЧЕНИЯ МНОГОФАЗНЫХ КЕРАМИЧЕСКИХ КОМПОЗИТОВ НА ОСНОВЕ ДИОКСИДА ЦИРКОНИЯ | 2015 |
|
RU2684793C2 |

