Предлагаемый способ управления может быть использован в космической технике при организации перелетов многоразового лунного корабля (МЛК) между орбитальной станцией (ОС), находящейся на орбите Земли, например МКС и лунной базой (ЛБ), расположенной на поверхности Луны.
Известен способ управления транспортной космической системой, выбранный в качестве аналога, включающем приложение к космическому кораблю (КК), находящемуся на околоземной орбите, импульса для его перелета на орбиту Луны, импульса схода с этой орбиты для последующей посадки на поверхность Луны, приложения управляемого воздействия при взлете с поверхности Луны и приложение отлетного импульса для обратного перелета к Земле. Такой способ управления был использован в 1969 году во время полета к Луне КК «Аполлон-11» [1. В.И. Левантовский «Механика космического полета в элементарном изложении», М., Наука, 1980]. Вначале ракетоноситель (РН) выводит на опорную орбиту связку, состоящую из разгонного блока (РБ), космического корабля (КК) и лунного взлетно-посадочного корабля (ЛК), который, в свою очередь состоит из посадочной ступени (ПС) и взлетного модуля (ВМ). Затем с помощью РБ обеспечивается перелет связки на окололунную орбиту. По достижению окололунной орбиты от КК отделяется ЛК, который с помощью двигательной установки ПС, осуществляет посадку на поверхность Луны. По завершению программы нахождения на Луне ВМ выполняет взлет с поверхности Луны, оставляя ПС на поверхности Луны, и выполняет промежуточную стыковку с находящемся на окололунной орбите КК для доставки на него экипажа ВМ. Затем ВМ отделяется, а КК выполняет отлетный импульс для перелета к Земле с последующим входом в атмосферу и посадкой в заданном районе.
Недостатком этого способа является одноразовость КК и ЛК и не возможность их использования после завершения миссии. При этом размерность ЛК не позволяла осуществлять высадку на Луну больше двух человек, а длительность их нахождения на Луне не превышала трех суток.
Известен из патента [2. патент RU № 2614460 от 28.03.17] способ управления транспортной космической системой, выбранный в качестве прототипа, включающий отстыковку многоразового лунного корабля (МЛК) от орбитальной станции (ОС), расположенной на околоземной орбите высотой НОС, последовательное приложение управляющих импульсов для стыковки с модулем разгонных блоков (МРБ), приложением управляющих импульсов для перелета на орбиту Луны и для схода с этой орбиты при посадке на поверхность Луны, приложение управляющего воздействия при взлете с поверхности Луны, приложение отлетного импульса VОТЛ для обратного перелета к Земле и стыковку с околоземной орбитальной станцией. В качестве МЛК рассматривался космический корабль, базирующийся на ОС, расположенной на околоземной орбите высотой НОС. Вначале с помощью РН на опорную орбиту выводится модуль разгонных блоков (МРБ), состоящий из РБ и ПС. Затем от ОС отстыковывают МЛК и стыкуют с МРБ. После чего к образованной связке прикладывают отлетный импульс для перевода на траекторию полета к Луне. После выработки топлива РБ отделяют от связки. После перехода на заданную окололунную орбиту связка МЛК с ПС выполняют сход с нее и осуществляют посадку в заданный район поверхности Луны. По завершению программы нахождения на Луне МЛК стартует с Луны, оставляя ПС на поверхности. Взлет МЛК осуществляется с азимутом стрельбы, определяемом с учетом текущего взаимного положения Луны и Земли по схеме, использованной при полете автоматической станции «Луна-16». При этом обратный перелет осуществляется по оптимальной плоской траектории, т.е. отлетный импульс является трансверсальным. За счет выбора даты старта с Луны при обратном перелете МЛК решается задача возвращения на околоземную ОС. Траектория перелета к Земле выбирается таким образом, чтобы пройти относительно Земли на высоте, находящейся в атмосфере Земли. За счет аэроторможения обеспечивается снижение скорости КК до 1-ой космической скорости по методу «тормозных» эллипсов. После нескольких торможений в атмосфере Земли и достижению в апогее высоты ОС МЛК выполняет импульс подъема перигея до высоты ОС, переходит на орбиту ОС и стыкуется с ней.
Этот способ позволяет отказаться от большого импульса торможения V1 для перехода на околоземную орбиту ОС, что позволяет сэкономить значительное количество топлива.
Основными недостатками такого способа управления являются необходимость иметь аэродинамический зонт с многоразовой теплозащитой и длительное время полета по переходным «тормозным» эллипсам, что приводит к необходимости неоднократно пересекать радиационные пояса Земли. Многоразовый аэродинамический зонт требует дополнительных ответственных профилактических работ на околоземной ОС при подготовке последующих перелетов, что также существенно увеличивает стоимость эксплуатации транспортной космической системы (ТС). Также трудно разработать подходящий облик МЛК, выполняющий как задачу посадки на поверхность Луны, так и аэроторможение у Земли.
Техническим результатом изобретения является возможность посадки МЛК на поверхность Луны с последующим его возвращением на ОС без аэроторможения.
Технический результат достигается благодаря тому, что в способе управления транспортной космической системой при полете на Луну, включающем отстыковку МЛК от ОС, расположенной на околоземной орбите высотой НОС, последовательное приложение управляющих импульсов для стыковки с МРБ, приложение управляющих импульсов для перелета на орбиту Луны и для схода с этой орбиты при посадке на поверхность Луны, приложение управляющего воздействия при взлете с поверхности Луны, приложение отлетного импульса VОТЛ для обратного перелета к Земле и стыковку с околоземной ОС, в отличие от известного, после стыковки с МРБ, образованным из ПС, РБ и заправочно-тормозного блока (ЗТБ) с запасом топлива массой М, заправляют МЛК от ЗТБ топливом массой M1 от ЗТБ, который отстыковывают перед сходом с орбиты для посадки на Луну МЛК и ПС, а затем прикладывают управляющие воздействия для взлета МЛК с Луны и управляющие импульсы для стыковки МЛК с ЗТБ, от которого вновь заправляют МЛК топливом массой M2≤≤M1, отстыковывают ЗТБ и, прикладывают к МЛК отлетный импульс VОТЛ для прохождения от Земли на высоте НОС, а, по достижению высоты НОС, импульс Vi, величину которого определяют с учетом топлива МЛК, оставшемуся после выполнения импульса VОТЛ, для перевода МЛК на эллиптическую орбиту с высотой апогея На, на которой МЛК стыкуют с тормозным блоком (ТБ), предварительно запущенным на эту эллиптическую орбиту, и, при прохождении перигея эллиптической орбиты на высоте НОС, к образованной связке из МЛК и ТБ с помощью ТБ, прикладывают импульс V2 для перехода образованной связки на заданную круговую орбиту НОС, отстыковывают ТБ и стыкуют МЛК с ОС, при этом М определяют как:
M=M1+M2+M3, где
M1 - масса топлива, соответствующая объему топливных баков МЛК,
М2 - масса топлива, которым заправляют МЛК на окололунной орбите,
М3 - масса топлива на выполнение тормозного импульса у Луны для перевода связки из МЛК, ПС и ЗТБ на окололунную орбиту.
Предлагаемый способ рассмотрим на примере ОС, находящейся на околоземной орбите. Технический результат в предлагаемом способе управления достигается за счет того, что отдельной РН на околоземную орбиту выводится МРБ, способный выполнить импульсы перевода полезной нагрузки на орбиту Луны и состоящий из РБ, ЗТБ и ПС. МЛК, находящийся в составе околоземной ОС, расстыковывается с ОС, а затем сближается и стыкуется с МРБ образовывая связку. Предполагается, что МРБ выводится на орбиту ИСЗ с помощью РН сверхтяжелого класса. Используя энергетические возможности РБ, входящего в МРБ, к связке прикладывается отлетный импульс для ее перевода на траекторию перелета на орбиту Луны, после чего РБ отделяется от связки. У Луны ЗТБ тормозным импульсом переводит связку на окололунную орбиту. Предполагается, что на ЗТБ имеется топливо для заправок МЛК. После первой заправки МЛК топливом массой М1, соответствующей объему топливных баков МЛК, связка МЛК с ПС расстыковывается от ЗТБ, выполняет импульс схода с орбиты и осуществляет посадку на поверхность Луны за счет топлива ПС.
После взлета, за счет топлива М1, МЛК выводится на окололунную орбиту, на которой находится ЗТБ и стыкуется с ним. Для отлета с окололунной орбиты к Земле необходимо выполнить заправку МЛК остатками топлива от ЗТБ массой M2≤M1. Отлетная орбита выбирается таким образом, чтобы минимальная высота пролета у Земли была равна высоте орбиты ОС НОС.
Целевой орбитой у Земли является орбита околоземной ОС. Рассмотрим баллистические условия возврата МЛК на орбиту околоземной ОС. Помимо собственно возможности возврата к Земле с минимальным отлетным импульсом, должно удовлетворяться условие совпадения плоскостей орбиты прилета МЛК к Земле орбиты ОС. Первое условие выполняется два раза в течение лунного месяца, т.е. один раз в 14 дней [1] и определяется скоростью обращения Луны вокруг Земли ~13°/сутки, а второе условие, из-за прецессии орбиты ОС ~5°/сутки, появляется примерно раз в 10÷11 суток [4. Р.Ф. Муртазин «Транспортная космическая система для обеспечения эксплуатации окололунной орбитальной структуры», ж. Космонавтика и Ракетостроение, 2017(2) № 95, с. 55-63]. Общий кратный период одновременного выполнения обоих условий составляет около 70 суток, что необходимо учитывать при планировании длительности работы экипажа МЛК на лунной базе.
Следующей операцией для МЛК после дозаправки на окололунной орбите является отлет от Луны к Земле и переход на высокоэллиптическую орбиту (ВЭО) у Земли. Заправка топливом М2, за вычетом предполагаемых затрат топлива на последующие стыковки с ОС и РБ, позволяет МЛК выполнить отлетный импульс VОТЛ к Земле (~0.9 км/с) и импульс V1 для перехода на ВЭО.
Для окончательного перехода на орбиту ОС нужно выполнить в перигее ВЭО тормозной импульс V2. Для выполнения этого импульса на ВЭО предварительно выводится ТБ, стыкующийся с МЛК. Чтобы достичь ВЭО ТБ необходимо выполнить импульс VTБ1=3.15 км/c-V1, где 3.15 км/с - отлетная скорость для перелета на Луну с опорной орбиты высотой 200 км. Соответственно, после стыковки с МЛК на ВЭО ТБ должен приложить к связке для достижения орбиты ОС на высоте 400 км импульс на ~0.1 км/с меньше, т.е. V2=VTБ2=VTБ1-0.1 км/с. После перехода на орбиту ОС ТБ отстыковывается, а МЛК стыкуется с ОС.
Сущность изобретения поясняется фиг. 1 ÷ 3 и табл. 1, где:
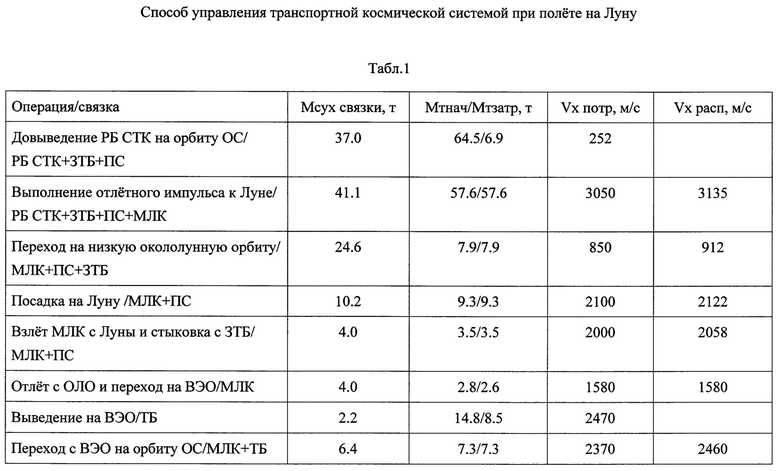
на фиг. 1 представлена схема операций в предлагаемой транспортной системе,
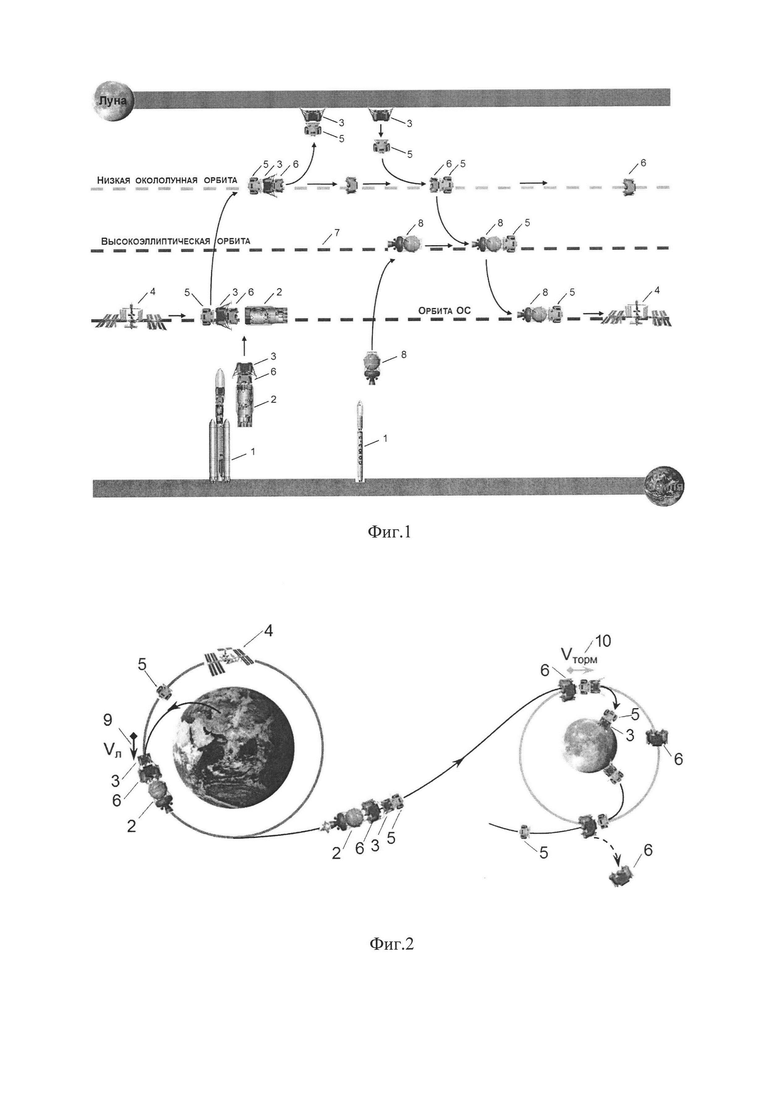
на фиг. 2 представлена баллистическая схема перелета МЛК с орбиты ОС на поверхность Луны вплоть до обратного отлета к Земле,
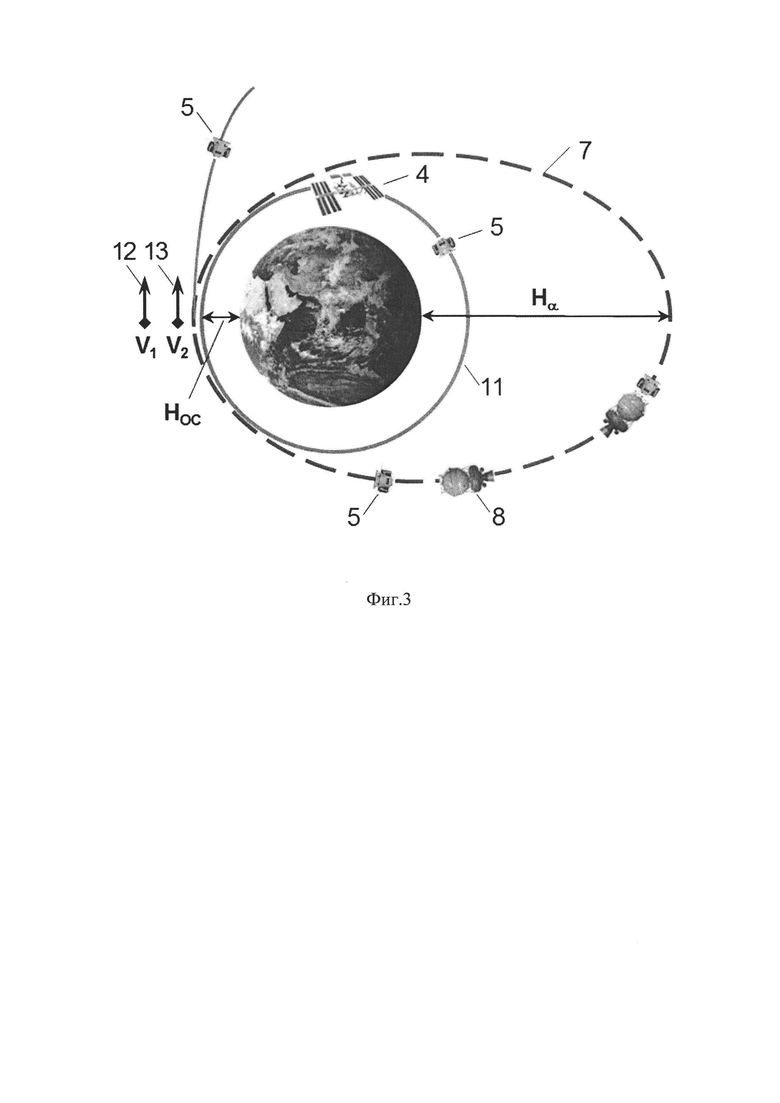
на фиг. 3 представлена баллистическая схема перехода МЛК с прилетной траектории вначале на ВЭО, а затем окончательно на орбиту ОС,
на табл. 1 представлены основные затраты топлива и соответствующие им характеристические скорости по операциям в этой ТС.
На этих фигурах отмечены следующие позиции:
1 - РН, 2 - РБ, 3 - ПС, 4 - ОС, 5 - МЛК, 6 - ЗТБ, 7 - ВЭО, 8 - ТБ, 9 - отлетный импульс к Луне VЛ, 10 - тормозной импульс перехода на окололунную орбиту VTOРМ, 11 - орбита ОС, 12 - импульс перехода на ВЭО V1, 13 - импульс перехода на орбиту ОС V2.
На фиг. 1 представлены схема полета, осуществляемого предлагаемым способом управления транспортной системы. Вначале сверхтяжелая РН 1 выводит на околоземную орбиту МРБ, состоящий из РБ 2, ЗТБ 6 и ПС 3, с которым стыкуется МЛК 5, отстыкованный от ОС 4. После выполнения отлетного импульса к Луне РБ отстыковывается, а связка с помощью ЗТБ переводится на окололунную орбиту. На окололунной орбите МЛК с ПС отстыковываются от ЗТБ и за счет топлива ПС выполняет посадку на Луне. До расстыковки МЛК проводит полную заправку топливом от ЗТБ. После взлета МЛК с Луны он вновь стыкуется с ЗТБ и заправляется оставшимся топливом, которое используется для отлета МЛК с окололунной орбиты и перехода на ВЭО 7. На ВЭО МЛК стыкуется с предварительно запущенным на эту орбиту ТБ 8. Затем связка выполняет с помощью ТБ импульс V2 для перехода на орбиту ОС. После чего МЛК стыкуется с ОС.
На фиг. 2 представлена баллистическая схема перелета МЛК 5 после расстыковки с ОС 4 на поверхность Луны вплоть до обратного отлета к Земле. После расстыковки с ОС МЛК стыкуется с МРБ, состоящем из РБ 2, ЗТБ 6 и ПС 3, а затем связка выполняет отлетный импульс VЛ 9 для перелета к Луне. У Луны связка из МЛК, ПС и ЗТБ средствами ЗТБ выполняет тормозной импульс VТОРМ 10 для перехода на окололунную орбиту. После расстыковки МЛК с ПС выполняют посадку на поверхность Луны с помощью топлива ПС, а ЗТБ продолжает полет на окололунной орбите в ожидании последующей стыковки с МЛК. По завершению миссии МЛК стартует на окололунную орбиту для стыковки с ЗТБ. Для отлета с окололунной орбиты используется топливо, полученное от ЗТБ.
На фиг. 3 представлена баллистическая схема перехода МЛК 5 у Земли вначале на ВЭО 7, а затем на орбиту ОС 11. После пролета Земли на расстоянии НОС МЛК выполняет импульс V1 12, величина которого определяется остатками топлива в МЛК для перехода на ВЭО с высотой апогея Нα. Предварительно на ВЭО выводится ТБ 8 для доставки МЛК на орбиту ОС. После стыковки МЛК с ТБ при прохождении перигея на высоте НОС выполняется тормозной импульс V2 13 для перехода МЛК на орбиту ОС, после чего он стыкуется с ОС 4.
В табл. 1 представлены основные динамические операции, которые необходимо выполнить в заявляемой ТС. Под каждую динамическую операцию с выполнением импульса представлен вид связки, ее конструктивная или сухая масса Мсух, начальная масса топлива Мтнач перед импульсом и затрачиваемая масса топлива Мтзатр на выполнение импульса, потребная Vхпотр и располагаемая Vxpacп величины характеристической скорости на проведение операции.
Эффективность предлагаемого способа управления транспортной системой показана по сравнению с реализованной транспортной системой при проведении лунных миссий КК «Аполлон» в 60-х-70-х годах прошлого столетия, в которых использовалась РН сверхтяжелого класса «Сатурн-5» грузоподъемностью 136 тонн. При этом масса КК на момент его прилета к Луне составляла около 50 т, из которых полная масса ЛК составляла ~15 т, а масса полностью заправленных ПС и ВМ около 10 т и 4 т соответственно. Масса ВМ в 4 т позволяла иметь конструктивную или сухую массу ВС в 2180 кг [1].
Рассмотрим возможности предлагаемой транспортной космической системы. В качестве ОС, на которой будет базироваться МЛК, можно рассматривать МКС.
Идеология, заложенная в предполагаемый способ, предполагает, что топлива полностью заправленного МЛК, достаточно для выведения с Луны на низкую окололунную орбиту и состыковаться с ЗТБ. Воспользуемся формулой Циолковского [1]:

где МТОПЛ - масса топлива МЛК, Мсух - конструктивная или сухая масса МЛК, Руд - удельный импульс двигателя, использующего топливо из высококипящих компонентов, например, Руд=334 сек [5. Асюшкин В.А. и др., «Универсальный разгонный блок повышенной энерговооруженности «Фрегат-СБУ», Вестник НПО им. Лавочкина № 2, 2017]. Потребную массу топлива, как функцию от Мсух и ΔVПОТР можно определить, преобразуя формулу (1):

Предельная потребная характеристическая скорость на выведение с Луны и стыковку с ЗТБ оцениваются в 2.0 км/с [1]. Согласно (2), при сухой массе МЛК с экипажем в 4.0 т полная заправка топливом M1=3.5 т обеспечивает суммарный импульс характеристической скорости в 2.058 км/с.
Оценим возможность использования предлагаемого способа для МЛК с Мсух=4.0 т при использовании РН сверхтяжелого класса (СТК) грузоподъемностью 103.0 т [6. «Роскосмос обнародовал характеристики сверхтяжелых ракет», РИА Новости 24 апреля 2019] для выведения МРБ и РН «Союз-5» среднего класса грузоподъемностью 17.0 т [7. «Эскизный проект ракеты «Союз-5» одобрен», РИА Новости 12 декабря 2017] для доставки ТБ на ВЭО. Примем, что РБ СТК и ТБ используют пару кислород-керосин в качестве топлива с удельным импульсом 365 с (синтин).
Расчеты показывают, что предлагаемый способ реализуем, например, при следующих характеристиках элементов ТС:
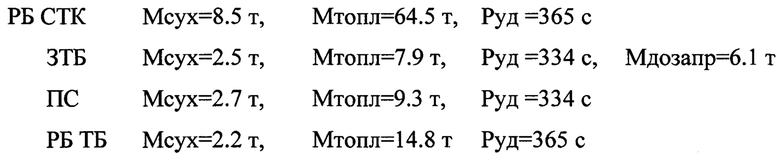
ЗТБ может быть создан на основе РБ «Фрегат-СБ» с сухой массой 1.27 тонн [5] с системой стыковки и баками для дозаправки от ТГК «Прогресс». Масса топлива для дозаправки в ЗТБ Мдозапр=М1+М2, причем топлива М2 должно хватить МЛК для отлета с окололунной орбиты, перехода на ВЭО (высота апогея Нα=33 тыс. км и период орбиты ~8.9 часов). Остаток топлива (~0.2 т) предполагается потратить на стыковку с ОС и на стыковку с РБ при следующей миссии. Масса топлива ЗТБ Мтопл=М3 используется при торможении связки для перехода на окололунную орбиту. ПС имеет облик, близкий посадочной ступени ЛК «Eagle» [1]. В качестве ТБ может быть использован РБ ДМ SLB [8. «Морской старт», Справочник пользователя, редакция D, февраль 2008].
Полученные с использованием формулы Циолковского (1) и представленные в табл. 1 по операциям располагаемые характеристические скорости Vxpaсп везде превосходят потребные Vхпотр, что обеспечивает необходимый резерв массы и подтверждает реализуемость способа с заявленными характеристиками всех элементов ТС.
Представленный пример показывает, как, используя предлагаемый способ управления транспортной системой, обеспечить посадку на Луну МЛК с сухой массой в 4.0 т. В качестве средств выведения для реализации этого способа используются РН СТК с грузоподъемностью 101.5 т и РН среднего класса «Союз-5» с грузоподъемностью 17.0 т.
В предложенном варианте облик МЛК должен быть близок к ВМ ЛК «Eagle», но сухая масса МЛК будет в 1.7 раза больше. Кроме того, в отличие от ВМ ЛК «Eagle» МЛК является многоразовым кораблем, что существенно удешевляет регулярную доставку экипажей после развертывания ЛБ.
В целом можно сделать вывод, что предлагаемый способ управления с размещением в составе околоземной ОС многоразового лунного корабля для посадки на поверхность Луны позволит создать конкурентную транспортную космическую систему для регулярных полетов на Лунную базу.
Изобретение относится к пилотируемым межпланетным полетам. Способ включает расстыковку многоразового лунного корабля (МЛК) с околоземной орбитальной станцией (ОС), выведение на опорную орбиту модуля с разгонными блоками (МРБ), сближение и стыковку МЛК с МРБ и перелет их связки на орбиту Луны. После заправки МЛК топливом от МРБ, торможения у Луны, посадки и последующего взлета МЛК с Луны на окололунную орбиту, стыковки с МРБ и второй заправки от него топливом переводят МЛК на высокоэллиптическую орбиту (ВЭО) вокруг Земли. Там МЛК стыкуют с тормозным блоком, предварительно выведенным на ВЭО, который переводит МЛК на орбиту стыковки с ОС. Техническим результатом является упрощение средств и повышение безопасности пилотируемых полетов с посадкой на поверхность Луны – за счет отказа от аэроторможения при возвращении МЛК на ОС. 1 табл., 3 ил.
Способ управления транспортной космической системой при полете на Луну, включающий отстыковку многоразового лунного корабля от орбитальной станции, расположенной на околоземной орбите высотой НОС, последовательное приложение управляющих импульсов для стыковки с модулем разгонных блоков, приложение управляющих импульсов для перелета на орбиту Луны и для схода с этой орбиты при посадке на поверхность Луны, приложение управляющего воздействия при взлете с поверхности Луны, приложение отлетного импульса VОТЛ для обратного перелета к Земле и стыковку с околоземной орбитальной станцией, отличающийся тем, что после стыковки с модулем разгонных блоков, образованным из посадочной ступени, разгонного блока и заправочно-тормозного блока с запасом топлива массой М, заправляют многоразовый лунный корабль топливом массой M1 от заправочно-тормозного блока, который отстыковывают перед сходом с орбиты для посадки на Луну многоразового лунного корабля и посадочной ступени, а затем прикладывают управляющие воздействия для взлета многоразового лунного корабля с Луны и управляющие импульсы для стыковки многоразового лунного корабля с заправочно-тормозным блоком, от которого вновь заправляют многоразовый лунный корабль топливом массой М2≤М1, отстыковывают заправочно-тормозной блок и прикладывают к многоразовому лунному кораблю отлетный импульс VОТЛ для прохождения от Земли на высоте НОС, а по достижению высоты НОС – импульс V1, величину которого определяют с учетом топлива многоразового лунного корабля, оставшегося после выполнения импульса VОТЛ, для перевода многоразового лунного корабля на эллиптическую орбиту с высотой апогея Нα, на которой многоразовый лунный корабль стыкуют с тормозным блоком, предварительно запущенным на эту эллиптическую орбиту, и при прохождении перигея эллиптической орбиты на высоте НОС к связке, образованной из многоразового лунного корабля и тормозного блока, с помощью тормозного блока прикладывают импульс V2 для перехода образованной связки на заданную круговую орбиту НОС, отстыковывают тормозной блок и стыкуют многоразовый лунный корабль с орбитальной станцией, при этом М определяют как:
М = M1 + М2 +М3,
где M1 – масса топлива, соответствующая объему топливных баков многоразового лунного корабля, М2 – масса топлива, которым заправляют многоразовый лунный корабль на окололунной орбите, М3 – масса топлива на выполнение тормозного импульса у Луны для перевода связки из многоразового лунного корабля, посадочной ступени и заправочно-тормозного блока на окололунную орбиту.
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2614466C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СТЫКУЕМЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2562902C1 |
| US 6669148 B2, 30.12.2003 | |||
| СРАВНЕНИЕ СХЕМ ПОЛЁТА НА ЛУНУ: США, РФ, СССР - newcomerstudio 2018-02-20 | |||
| Приспособление для нагрева трубок Перкинса в хлебопекарных печах | 1927 |
|
SU14551A1 |

