Предлагаемый способ управления может быть использован в космической технике при реализации полетов многоразового пилотируемого корабля (МПК) на поверхность Луны, с использованием околоземной орбитальной станции (ОС) и Лунной орбитальной станции (ЛОС).
Известен способ управления транспортной космической системой, выбранный в качестве аналога, включающий приложение к космическому кораблю (КК), находящемуся на околоземной орбите, импульса для его перелета на орбиту Луны, приложение управляющих воздействий для схода с этой орбиты с целью последующей посадки на поверхность Луны и при взлете с поверхности Луны, приложение отлетного импульса для обратного перелета к Земле. Такой способ управления был использован в 1969 году во время полета к Луне ЮС «Аполлон-11» [1. В.И. Левантовский «Механика космического полета в элементарном изложении», М., Наука, 1980]. Вначале ракета-носитель (РН) выводит на опорную орбиту связку, состоящую из разгонного блока (РБ), КК и лунного взлетно-посадочного корабля (ЛВПК), который, в свою очередь состоит из посадочной ступени (ПС) и взлетного модуля (ВМ). Затем с помощью разгонного блока (РБ) обеспечивается перелет связки на окололунную орбиту. По достижению окололунной орбиты от КК отделяется ЛВПК, который с помощью двигательной установки (ДУ) ПС, осуществляет посадку на поверхность Луны. По завершению программы нахождения на Луне ВМ выполняет взлет с поверхности Луны, оставляя ПС на поверхности Луны, и выполняет промежуточную стыковку с находящимся на окололунной орбите КК для доставки на него экипажа ВМ. Затем ВМ отделяется, а КК выполняет отлетный импульс для перелета по направлению к Земле с последующим входом в атмосферу и посадкой в заданном районе.
Недостатком этого способа является одноразовость КК и ЛВПК и невозможность их использования после завершения миссии. При этом размерность ЛВПК не позволяет осуществлять высадку на Луну больше двух человек, а длительность их нахождения на Луне не превышает трех суток.
Известен из патента [2. Патент RU №2763226 от 28.12.2021] способ управления транспортной космической системой при полете на Луну, выбранной в качестве прототипа, включающий отстыковку МПК от околоземной ОС, расположенной на орбите высотой HOC, приложение управляющих импульсов для перелета на орбиту Луны, приложение управляющих воздействий для схода многоразового лунного корабля (МЛК) с окололунной орбиты при посадке на поверхность Луны и при взлете с поверхности Луны, приложение управляющих импульсов для стыковки МЛК с РБ, приложение отлетного импульса для обратного перелета МПК по направлению к Земле и стыковки с околоземной ОС. В качестве МПК и МЛК рассматривался КК, базирующийся на околоземной ОС. Вначале отдельной РН на околоземную орбиту выводится модуль разгонных блоков (МРБ), способный выполнить импульсы перевода полезной нагрузки на орбиту Луны и состоящий из РБ, ПС и заправочно-тормозного блока (ЗТБ), с запасом топлива для двух заправок МЛК. МЛК, находящийся в составе околоземной ОС, расстыковывается с ОС, а затем сближается и стыкуется с МРБ, образовывая связку. Предполагается, что МРБ выводится на орбиту ИСЗ с помощью РН сверхтяжелого класса. Используя энергетические возможности РБ, входящего в состав МРБ, к связке прикладывается отлетный импульс для ее перевода на траекторию перелета на орбиту Луны, после чего РБ отделяется от связки. У Луны ЗТБ тормозным импульсом переводит связку на окололунную орбиту. Связка МЛК с ПС расстыковывается с ЗТБ, выполняет импульс схода с орбиты и осуществляет посадку на поверхность Луны за счет топлива ПС. После взлета, за счет заправленного топлива, МЛК выводится на окололунную орбиту, на которой находится ЗТБ и стыкуется с ним, при этом ПС остается на поверхности Луны. После дозаправки МЛК от ЗТБ они расстыковываются. К МЛК прикладывают отлетный импульс для обратного перелета к Земле. Отлетная орбита выбирается таким образом, чтобы минимальная высота пролета у Земли была равна высоте орбиты ОС НОС. по достижении высоты НОС, выполняют импульс V1, величину которого определяют с учетом топлива МЛК, оставшемуся после выполнения импульса Vотл, для перевода МЛК на эллиптическую орбиту с высотой апогея На, на которой МЛК стыкуют с тормозным блоком (ТБ), предварительно запущенным на эту эллиптическую орбиту, и, при прохождении перигея эллиптической орбиты на высоте HOC, к образованной связке из МЛК и ТБ с помощью ТБ, прикладывают импульс V2 для перехода образованной связки на заданную круговую орбиту Нос, отстыковывают ТБ и стыкуют МЛК с ОС.
Основными недостатками такого способа управления является необходимость в сверхтяжелой ракете для выведения на околоземную орбиту массивной связки МРБ, включающей РБ, ПС и ЗТБ. Также использование дозаправки корабля на орбите снижает надежность всей схемы полета на поверхность Луны, так как в случае срыва дозаправки от ЗТБ на окололунной орбите МЛК не сможет вернуться к Земле. Использование ТБ для перевода МЛК на орбиту околоземной ОС также снижает надежность схемы, в случае срыва стыковки МЛК с ТБ или неисполнения импульса V2 посредством двигательной установки ТБ невозможно перевести МЛК на орбиту ОС или вернуть на Землю.
Техническим результатом изобретения является возможность посадки МЛК на поверхность Луны с последующим его возвращением на ЛОС, при этом МПК возвращается на околоземную ОС при помощи аэродинамического торможения в атмосфере Земли. Для организации транспортной системы достаточно использовать РН тяжелого класса.
Технический результат достигается благодаря тому, что в способе управления транспортной космической системой для посадки на Луну с возвратом на околоземную орбитальную станцию, включающем отстыковку МПК от околоземной ОС, расположенной на орбите высотой НОС, приложение управляющих импульсов для перелета на орбиту Луны, приложение управляющих воздействий для схода МЛК с окололунной орбиты при посадке на поверхность Луны и при взлете с поверхности Луны, приложение управляющих импульсов для стыковки МЛК с РБ, приложение отлетного импульса для обратного перелета МПК по направлению к Земле и стыковки с околоземной ОС, в отличие от известного, прикладывают управляющие импульсы для перевода МПК на круговую окололунную орбиту, на которой осуществляют его стыковку с ЛОС, где базируется связка, состоящая из МЛК, имеющего функцию ВМ, ПС и РБ, после чего посредством ДУ РБ к связке из МЛК, ПС и РБ прикладывают управляющие импульсы для перехода на окололунную орбиту, где отстыковывают РБ, с этой окололунной орбиты осуществляют посадку связки МЛК и ПС на поверхность Луны, затем ПС отстыковывают, а после взлета МЛК с поверхности Луны и стыковки с РБ на окололунной орбите к связке из МЛК и РБ посредством ДУ РБ прикладывают управляющие импульсы для ее перевода на орбиту ЛОС, РБ отстыковывают, МЛК стыкуют с ЛОС, затем МПК отстыковывают от ЛОС и к нему прикладывают отлетный импульс, величину которого определяют с учетом расположения перигея орбиты возврата в атмосфере Земли, таким образом, чтобы после прохождения перигея за счет торможения в атмосфере выполнилось условие Нα=НОС, где Нα - высота апогея орбиты МПК, после чего в апогее орбиты к МПК прикладывают импульс перехода Vпep на круговую орбиту НОС для его последующей стыковки с околоземной ОС.
Предлагаемый способ рассмотрим на примере ОС и ЛОС, находящихся на околоземной и окололунной орбитах соответственно. Технический результат в предлагаемом способе управления достигается за счет того, что перед началом миссии на МПК, находящемся на околоземной ОС, устанавливают аэродинамический щит с абляционной теплозащитой, способной выдержать температурный нагрев до 3000°С. Пуском РН тяжелого класса на орбиту околоземной станции выводится кислородно-водородный РБ (КВРБ), способный выполнить импульсы перевода полезной нагрузки на орбиту Луны. Выведение КВРБ осуществляется в непосредственную окрестность ОС, что позволяет МПК после отстыковки от ОС осуществить сближение и стыковку с КВРБ по быстрой двухвитковой схеме. В отличие от обычного сближения с одним активным маневрирующим кораблем, в этой схеме и КВРБ и МПК участвуют в обеспечении сближения. Вначале с помощью двух импульсов КВРБ переходит на коэллиптическую орбиту, обеспечивающую постоянное высотное рассогласование с орбитой ОС. Выбор такой орбиты позволяет МПК с помощью одного трансверсального импульса перейти в окрестность КВРБ для последующей с ним стыковки и образования связки [3. Муртазин Р.Ф., Чудинов Н.А. Проведение «быстрого» сближения космического корабля и разгонного блока при двухпусковой схеме отлета к Луне // Космонавтика и ракетостроение. 2020. №5(116). С. 20-30]. Используя энергетические возможности КВРБ к связке прикладывается отлетный импульс ΔV1 для ее перевода на траекторию перелета на орбиту Луны, после чего КВРБ отделяется от связки. Перевод МПК на окололунную орбиту осуществляется за счет собственной двигательной установки посредством выполнения двух импульсов. Первым импульсом в периселении прилетной орбиты выполняется переход МПК на высокоэллиптическую селеноцентрическую орбиту с апоселением в окрестности грависферы Луны (~66 тыс. км от центра Луны), что позволило получить мультипликативный эффект за счет синергии гравитационных полей Земли и Луны, приводящей к «естественной» трансформации орбиты с повышением периселения до нужной высоты с одновременным снижением высоты апоселения. Вторым импульсом в периселении уже трансформированной орбиты МПК переходит на круговую окололунную орбиту и стыкуется с ЛОС, где базируется МЛК, имеющий функцию взлетного модуля. Используемый метод управления движением космического объекта при перелете с орбиты Земли на орбиту Луны [4. Патент RU №2709951 от 23.12.2019] далее именуемый как «грависферный» метод, позволяет увеличить доставляемую массу полезной нагрузки на окололунную орбиту. Так если прямой переход на окололунную орбиту требует затрат характеристической скорости в 640÷700 м/с, то при «грависферном» способе потребуется около 350 м/с, что почти в два раза меньше [5. Муртазин Р.Ф. Эффективное выведение КА на высокую круговую окололунную орбиту // Космонавтика и ракетостроение. 2019. №3 (108). С.5-12].
Предварительно до запуска МПК на ЛОС двумя пусками РН тяжелого класса осуществляется доставка «грависферным» методом [5] заправленной ПС и РБ, которые стыкуются с МЛК, образовывая связку, базирующуюся на ЛОС и предназначенную для обеспечения посадки экипажа на поверхность Луны и последующего взлета с Луны, и стыковки с ЛОС. Помимо этого, РБ выполняет и логистическую доставку топлива для дозаправки МЛК.
После стыковки МПК с ЛОС связка, состоящая из МЛК, РБ и ПС, отстыковывается от ЛОС. Посредством ДУ РБ связку переводят на низкую окололунную орбиту, где связка из МЛК и ПС расстыковывается от РБ, выполняет импульс схода с орбиты и осуществляет посадку на поверхность Луны за счет топлива ПС.
После взлета МЛК с поверхности Луны посредством собственной ДУ МЛК выводится на окололунную орбиту, на которой находится РБ и стыкуется с ним, при этом ПС остается на поверхности Луны. РБ выполняет разгонные импульсы для перевода МЛК на орбиту ЛОС и отстыковывается, после чего МЛК стыкуется с ЛОС. Многоразовый пилотируемый корабль отстыковывают от лунной орбитальной станции и к нему прикладывают отлетный импульс, величину которого определяют с учетом расположения перигея орбиты возврата в атмосфере Земли, таким образом, чтобы после прохождения перигея за счет торможения в атмосфере выполнилось условие Нα=HOC, где Нα - высота апогея орбиты многоразового пилотируемого корабля. После чего отстыковывают аэродинамический щит и в апогее орбиты к многоразовому пилотируемому кораблю прикладывают импульс перехода Vпep на круговую орбиту НОС для его последующей стыковки с околоземной орбитальной станцией.
Сущность изобретения поясняется фиг.1 и табл.1÷3, где:
на фиг.1 представлена схема операций предлагаемой транспортной системы,
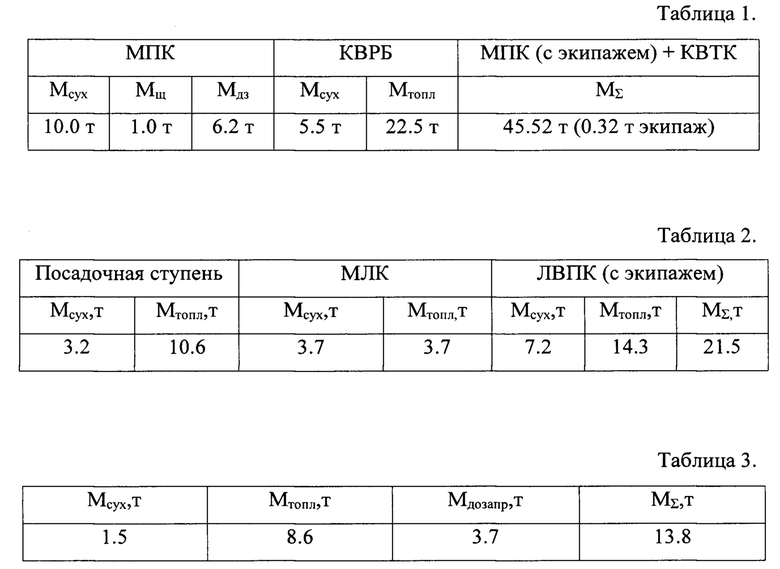
в табл.1 представлены оценочные массовые характеристики МПК и КВРБ на орбите околоземной ОС,
в табл.2 представлены массовые характеристики отдельных элементов ЛВПК предлагаемой транспортной системы,
в табл.3 представлены оценочные характеристики РБ предлагаемой транспортной системы.
На фиг.1 отмечены следующие позиции:
1 - МПК с аэродинамическим щитом, 2 - РН тяжелого класса, 3 - околоземная ОС, 4 - КВРБ, 5 - ЛОС, 6 - МЛК, 7 - ПС, 8 - РБ, 9 - аэродинамический щит, 10 - МПК без аэродинамического щита.
На фиг.1 представлена схема полета, осуществляемая предлагаемым способом управления транспортной системой. МПК с аэродинамическим щитом 1 находится на борту околоземной ОС 3. Пуском РН тяжелого класса 2 на орбиту околоземной станции выводится КВРБ 4. МПК расстыковывается с околоземной ОС, а затем сближается и стыкуется с КВРБ. Используя энергетические возможности КВРБ к связке прикладывается отлетный импульс для ее перевода на траекторию перелета на орбиту Луны, после чего КВРБ отделяется от связки. Перевод МПК на окололунную орбиту осуществляется за счет собственной двигательной установки. После перехода на круговую окололунную орбиту МПК стыкуется с ЛОС 5, где базируется МЛК 6, имеющий функцию взлетного модуля. Предварительно до запуска МПК на ЛОС двумя пусками РН тяжелого класса осуществляется доставка заправленной ПС 7 и РБ 8, которые стыкуются с МЛК, образовывая связку. Для выдачи отлетного импульса для перевода ПС и РБ на траекторию перелета на орбиту Луны используется КВРБ. После стыковки МПК с ЛОС связка, состоящая из МЛК, РБ и ПС отстыковывается от ЛОС. Посредством ДУ РБ связку переводят на низкую окололунную орбиту, где связка МЛК с ПС расстыковывается от РБ, выполняет импульс схода с орбиты и осуществляет посадку на поверхность Луны за счет топлива ПС. После взлета МЛК посредством собственной ДУ выводится на окололунную орбиту, на которой находится РБ и стыкуется с ним, при этом ПС остается на поверхности Луны. РБ выполняет разгонные импульсы для перевода МЛК на орбиту ЛОС и отстыковывается, после чего МЛК стыкуется с ЛОС. Затем МПК отстыковывается от ЛОС для отлета с окололунной орбиты к Земле. Величину отлетного импульса определяют с учетом расположения перигея орбиты возврата в атмосфере Земли, таким образом, чтобы после прохождения перигея за счет торможения в атмосфере выполнилось условие Нα=HOC, где Нα - высота апогея орбиты МПК. После прохождения перигея орбиты аэродинамический щит 9 отстыковывается. В апогее орбиты к МПК без аэродинамического щита 10 прикладывают импульс перехода Vпep на круговую орбиту Нос для его последующей стыковки с околоземной ОС.
В табл.1 представлены оценочные массовые характеристики МПК и КВРБ на орбите околоземной ОС. Для МПК представлены значения: конструктивная или сухая масса Мсух, масса топлива для дозаправки Мдз и масса аэродинамического щита Мщ. Для КВРБ приведена конструктивная или сухая масса Мсух и масса топлива Мтопл. Также приведена суммарная масса МПК с экипажем и КВРБ MΣ.
В табл.2 представлены массовые характеристики отдельных элементов ЛВПК предлагаемой транспортной системы. Для каждого элемента ЛВПК, состоящего из МЛК и ПС, приведена конструктивная или сухая масса Мсух и масса топлива Мтопл. Также приведена суммарная масса ЛПВК MΣ.
В табл.3 представлены оценочные характеристики РБ предлагаемой транспортной системы, конструктивная или сухая масса Мсух, масса топлива Мтопл, масса топлива для дозаправки МЛК Мдозапр, суммарная масса РБ MΣ.
Эффективность предлагаемого способа управления транспортной системой показана в сравнении с реализованной транспортной системой при проведении лунных миссий КК «Аполлон» в 60-70-х годах прошлого столетия, когда использовалась РН сверхтяжелого класса «Сатурн-5» грузоподъемностью 136 тонн. При этом масса КК на момент его прилета к Луне составляла около 50 т, из которых полная масса ЛК составляла ~15 т, а масса полностью заправленных ПС и ВМ около 10 т и 4 т соответственно. Масса ВМ в 4 т позволяла иметь конструктивную или сухую массу взлетной ступени в 2180 кг [1].
Идеология, заложенная в предлагаемый способ, предполагает, что за счет использования ЛОС, расположенной на круговой окололунной орбите, и МЛК, базирующегося на ЛОС, повышается надежность всей схемы полета на поверхность Луны, а применение «грависферного» метода перелета [4] позволяет перейти на РН тяжелого класса с грузоподъемностью при наклонениях 51,6° и 97° в 37,7 т и 34,2 т соответственно, отказавшись от РН сверхтяжелого класса.
Экипаж МПК доставляется на орбиту околоземной ОС наклонением 97° и HOC=400 км с помощью КК «Союз-МС» и РН среднего класса «Союз-2.1б», где ожидает запуска КВРБ на РН тяжелого класса Ангара-А5В (А5В). После стыковки МПК с КВРБ, последний выполняет отлетный импульс к Луне. Попутной задачей КВРБ является логистическая доставка топлива для дозаправки МПК. Расчеты показывают, что, исходя из располагаемой полезной нагрузки РН А5В на наклонении 97° в 34,2 т, КВРБ способен выполнить отлетный импульс к Луне с МПК массой 17,2 т. Согласование траектории прилета к Луне с плоскостью орбиты ЛОС выполняется во время «грависферного» перелета. В табл.1 представлены оценочные массовые характеристики МПК и КВРБ на орбите околоземной ОС.
Как уже описывалось выше, на ЛОС предполагается наличие МЛК, имеющего функцию ВМ, и для сборки всего ЛВПК потребуется доставка на ЛОС заправленной ПС и РБ. Для достижения окололунной орбиты ЛОС высотой 10000 км требуется выдача отлетного импульса равного 3150 м/с и ~350 м/с для выдачи тормозных импульсов для перехода на орбиту ЛОС с использованием «грависферного» метода перелета. Удельный импульс КВРБ составит Руд=470 сек. Грузоподъемность РН тяжелого класса для околоземной орбиты наклонением 51,6° составит 37,7 т. Воспользуемся формулой Циолковского [1]:

где Мтопл - масса топлива МЛК, Мсух - конструктивная или сухая масса МЛК, Руд - удельный импульс двигателя, использующего топливо из высококипящих компонентов.
Расчеты показывают, что одним пуском РН А5В с КВРБ может доставить на орбиту ЛОС квант полезной нагрузки массой 13,8 т. Это, в свою очередь, позволит обеспечить посадку на Луну МЛК с экипажем массой 4 т, что почти в два раза превышает размерность ВМ ЛВПК «Eagle» из программы «Аполлон» [1]. В табл.2 представлены массовые характеристики отдельных элементов ЛВПК предлагаемой транспортной системы.
При оценке масс учитывалось, что потребные характеристические скорости Vx для посадки ЛВПК с низкой окололунной орбиты на Луну и взлета МЛК на низкую окололунную орбиту составляют 2100 м/с и 2000 м/с соответственно, а удельный импульс двигательных установок ПС и ВМ Руд = 325 сек.
Оценочные характеристики РБ представлены в табл.3. Ближайшим аналогом МБ может быть РБ «Фрегат». Предполагается, что топлива в РБ будет достаточно для доставки с орбиты ЛОС на низкую окололунную орбиту ЛВПК с суммарной массой  и для доставки с низкой окололунной орбиты на орбиту ЛОС МЛК с экипажем массой 4 т. Характеристическая скорость обоих перелетов составит по ΔVпорт=800 м/с.
и для доставки с низкой окололунной орбиты на орбиту ЛОС МЛК с экипажем массой 4 т. Характеристическая скорость обоих перелетов составит по ΔVпорт=800 м/с.
Представленный пример показывает, как, используя предлагаемый способ управления транспортной системой, обеспечить посадку на Луну МЛК с сухой массой в 4,0 т. В качестве средств выведения для реализации этого способа используются РН А5 В.
В предложенном варианте облик МЛК должен быть близок к ВМ ЛК «Eagle», но сухая масса МЛК будет в 1,8 раза больше. Кроме того, в отличие от ВМ ЛК «Eagle» МЛК является многоразовым кораблем, что существенно удешевляет регулярную доставку экипажей.
Дата отлета МПК к Земле должна обеспечивать его перелет в плоскость орбиты околоземной ОС. Проведенный анализ показал, что возможность возвращения МПК в плоскость орбиты околоземной ОС при наклонении 97° появляется со скважностью 12-13 суток, причем продолжительность окна отлета составляет 2-3 суток.
Для возвращения МПК на околоземную орбиту используется аэроторможение, для чего перигей прилетной орбиты располагается в атмосфере Земли. Тормозной экран с абляционным покрытием, доставляемый на орбиту околоземной ОС вместе с КВРБ и выдерживающий температуру нагрева до 3000°С, позволяет снизить скорость МПК за одно прохождение атмосферы, после чего тормозной экран отделяется.
Расчеты показывают, что конструктивная масса МПК составляет около 10 т и позволяет обеспечить герметичный объем в 21,8 м3. За счет отказа от средств обеспечения посадки (парашюты, двигатели мягкой посадки, взводимые кресла, двигатели системы управления спуском, балансировочный груз и т.д.) располагаемый объем герметичной части МПК, позволяет обеспечить комфортное пребывание экипажа до стыковки с ЛОС.
Экономичность альтернативной ТС достигается за счет отказа от РН тяжелого класса и перехода с одноразового на частично многоразовый ЛВПК. Включение ЛОС, как базы для МЛК, позволит обеспечить устойчивость предлагаемой схемы за счет допустимого разнесения по времени доставки всех элементов транспортной системы.
В целом, можно сделать вывод, что предлагаемый способ управления с размещением в составе ЛОС многоразового лунного корабля для посадки на поверхность Луны позволит создать конкурентную транспортную космическую систему для регулярных полетов на Лунную базу, развернутую на поверхности Луны.

Изобретение относится к межпланетным многоимпульсным перелетам с посадкой на Луну, в которых используются околоземная (ОС) и лунная (ЛОС) орбитальные станции. Многоразовый пилотируемый корабль (МПК), базирующийся на ОС, отделяют от нее, осуществляют перелет к ЛОС на круговой окололунной орбите и стыкуют с ней. На ЛОС базируется многоразовый лунный корабль (МЛК) с функцией взлетного модуля, стыкуемый с предварительно доставляемыми на ЛОС заправленной посадочной ступенью (ПС) и разгонным блоком (РБ). После отстыковки от ЛОС, РБ переводит МЛК и ПС на низкую окололунную орбиту, сам отделяется, а МЛК производит посадку на поверхность Луны посредством ПС. После взлета МЛК с Луны и стыковки с РБ на орбите ожидания, он доставляется к ЛОС и стыкуется с ней. МПК отделяют от ЛОС и переводят на орбиту возврата с перигеем в атмосфере Земли и апогеем, после торможения в атмосфере, на высоте орбиты ОС. Импульсом в апогее переводят МПК на орбиту ОС для последующей стыковки с ней. Техническим результатом является создание, на основе РН тяжелого класса, конкурентной транспортной системы для регулярных полетов на Лунную базу, с использованием для возвращения МПК на ОС торможения в атмосфере Земли. 1 ил., 3 табл.
Способ управления транспортной космической системой для посадки на Луну с возвратом на околоземную орбитальную станцию, включающий отстыковку многоразового пилотируемого корабля (МПК) от околоземной орбитальной станции, расположенной на орбите высотой НОС, приложение управляющих импульсов для перелета на орбиту Луны, приложение управляющих воздействий для схода многоразового лунного корабля с окололунной орбиты, при посадке на поверхность Луны и при взлете с поверхности Луны, приложение управляющих импульсов для стыковки многоразового лунного корабля с разгонным блоком, приложение отлетного импульса для обратного перелета МПК по направлению к Земле и стыковки с околоземной орбитальной станцией, отличающийся тем, что прикладывают управляющие импульсы для перевода МПК на круговую окололунную орбиту, на которой осуществляют его стыковку с лунной орбитальной станцией, где базируется связка из многоразового лунного корабля, посадочной ступени и разгонного блока, после чего посредством двигательной установки разгонного блока к связке из многоразового лунного корабля, посадочной ступени и разгонного блока прикладывают управляющие импульсы для перехода на окололунную орбиту, где отстыковывают разгонный блок, после чего с этой окололунной орбиты осуществляют посадку связки многоразового лунного корабля и посадочной ступени на поверхность Луны, затем посадочную ступень отстыковывают, а после взлета многоразового лунного корабля с поверхности Луны и стыковки с разгонным блоком на окололунной орбите к связке из многоразового лунного корабля и разгонного блока посредством двигательной установки разгонного блока прикладывают управляющие импульсы для ее перевода на орбиту лунной орбитальной станции, разгонный блок отстыковывают, многоразовый лунный корабль стыкуют с лунной орбитальной станцией, затем МПК отстыковывают от лунной орбитальной станции и к нему прикладывают отлетный импульс, величину которого определяют из условия расположения перигея орбиты возврата в атмосфере Земли таким образом, чтобы после прохождения перигея за счет торможения в атмосфере выполнилось условие Нα=НОС, где Нα - высота апогея орбиты МПК, после чего в апогее орбиты к МПК прикладывают импульс перехода Vпep на круговую орбиту НОС для его последующей стыковки с околоземной орбитальной станцией.
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ ПРИ ПОЛЕТЕ НА ЛУНУ | 2020 |
|
RU2763226C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2614466C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СТЫКУЕМЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2562902C1 |
| US 6669148 B2, 30.12.2003 | |||
| СРАВНЕНИЕ СХЕМ ПОЛЁТА НА ЛУНУ: США, РФ, СССР - newcomerstudio 2018-02-20 | |||
| Приспособление для нагрева трубок Перкинса в хлебопекарных печах | 1927 |
|
SU14551A1 |

