Изобретение относится к спутниковым навигационным системам, а именно к оборудованию наземного комплекса управления данных систем.
Бортовая аппаратура межспутниковых измерений обеспечивает автономное функционирование группировки космических аппаратов спутниковой навигационной системы, например системы ГЛОНАСС, а также позволяет повысить точность эфемеридного и частотно-временного обеспечения спутниковой навигационной системы, обеспечить оперативную доставку информации со всех космических аппаратов, передачу командно-программной и прием телеметрической информации, оперативный контроль целостности космической системы, и снизить нагрузку на вычислительные средства наземного комплекса управления. Оборудование бортовой аппаратуры межспутниковых измерений размещено на космических аппаратах спутниковой навигационной системы, например, для системы ГЛОНАСС на двадцати четырех космических аппаратах, разбитых на четыре группы по шесть космических аппаратов (антиподы), обращающихся в трех плоскостях. Каждой группе из шести космических аппаратов выделен фиксированный временной интервал для работы в режиме передачи, остальное время выделено для работы в режиме приема сигнала. Очевидно, что для эффективной работы бортовой аппаратуры межспутниковых измерений должно быть выделен комплекс наземных средств, обеспечивающих устойчивое и эффективное взаимодействие с космическими аппаратами, передачу указанной выше информации и т.п.
В качестве примера наземных средств, обеспечивающих прием и передачу данных, управление космическими аппаратами спутниковых навигационных систем могут быть приведены наземные пункты приема и передачи информации – контроля и управления бортовой аппаратурой космических аппаратов, входящие в состав данных систем и известные из заявки на изобретение US2014002302, Raytheon Company, приоритет 28.06.2012, публикация 02.01.2014, а также из патент на изобретение RU2503127, ИСС им. Академика М.Ф.Решетнёва, приоритет 20.12.2011, публикация 27.12.2013 (ближайший аналог изобретения). Данная наземная система контроля и управления, которая с очевидностью может быть использована для контроля и управления бортовой аппаратурой межспутниковых измерений, включает вычислительное оборудование, подключенное к устройству формирования опорной частоты; комплект (комплекты) приемо-передающей аппаратуры межспутниковой радиолинии спутниковой навигационной системы, связанной с вычислительным оборудованием (через коммутатор в RU2503127) и подключенной к устройству формирования опорной частоты; а также комплект аппаратуры приема навигационного сигнала. В свою очередь, изобретение представляет собой дальнейшее совершенствование описанных выше систем и позволит предложить наземную систему контроля и управления бортовой аппаратурой межспутниковых измерений, характеризующуюся управляемостью работы при минимизации количества оборудования, задействованного для управления космическими аппаратами.
Указанный технический результат, ожидаемый от использования изобретения, достигается при использовании наземной системы контроля и управления бортовой аппаратурой межспутниковых измерений навигационной системы, включающей вычислительное оборудование, подключенное к устройству формирования опорной частоты; по меньшей мере, один комплект приемо-передающей аппаратуры межспутниковой радиолинии спутниковой навигационной системы, связанной с вычислительным оборудованием и подключенной к устройству формирования опорной частоты; по меньшей мере, один комплект аппаратуры приема навигационного сигнала. В отличие от аналога, упомянутое вычислительное оборудование включает центральный вычислительный комплекс, управляющий комплекс приемо-передающей аппаратуры и вычислительный комплекс приемника навигационных сигналов, которые подключены к коммутатору сети Ethernet и взаимодействуют между собой и с, по меньшей мере, одним комплектом приемо-передающей аппаратуры через данный коммутатор и сеть Ethernet.
Центральный вычислительный комплекс связан с центром управления спутниковой навигационной системы и подключен к устройству формирования опорной частоты, которое, в свою очередь, подключено к центральному синхронизатору. Управляющий вычислительный комплекс приемо-передающей аппаратуры взаимодействует с центральным вычислительным комплексом и с, по меньшей мере, одним упомянутым комплектом приемо-передающей аппаратуры. Вычислительный комплекс приемника навигационных сигналов взаимодействует с, по меньшей мере, одним комплектом аппаратуры приема навигационного сигнала, центральным вычислительным комплексом, управляющим вычислительным комплексом приемо-передающей аппаратуры.
Количество задействованных комплектов приемо-передающей аппаратуры межспутниковой радиолинии спутниковой навигационной системы не превышает, то есть меньше или равно, количество космических аппаратов спутниковой навигационной системы и определяется управляющим вычислительным комплексом приемо-передающей аппаратуры. Предложенная наземная система контроля и управления бортовой аппаратурой межспутниковых измерений также может быть использована для управления бортовым информационно-навигационным комплексом. Для размещения перечисленного выше оборудования наземной системы контроля и управления бортовой аппаратурой межспутниковых измерений может быть выделен как один, так и несколько отдельных командно-измерительных комплексов.
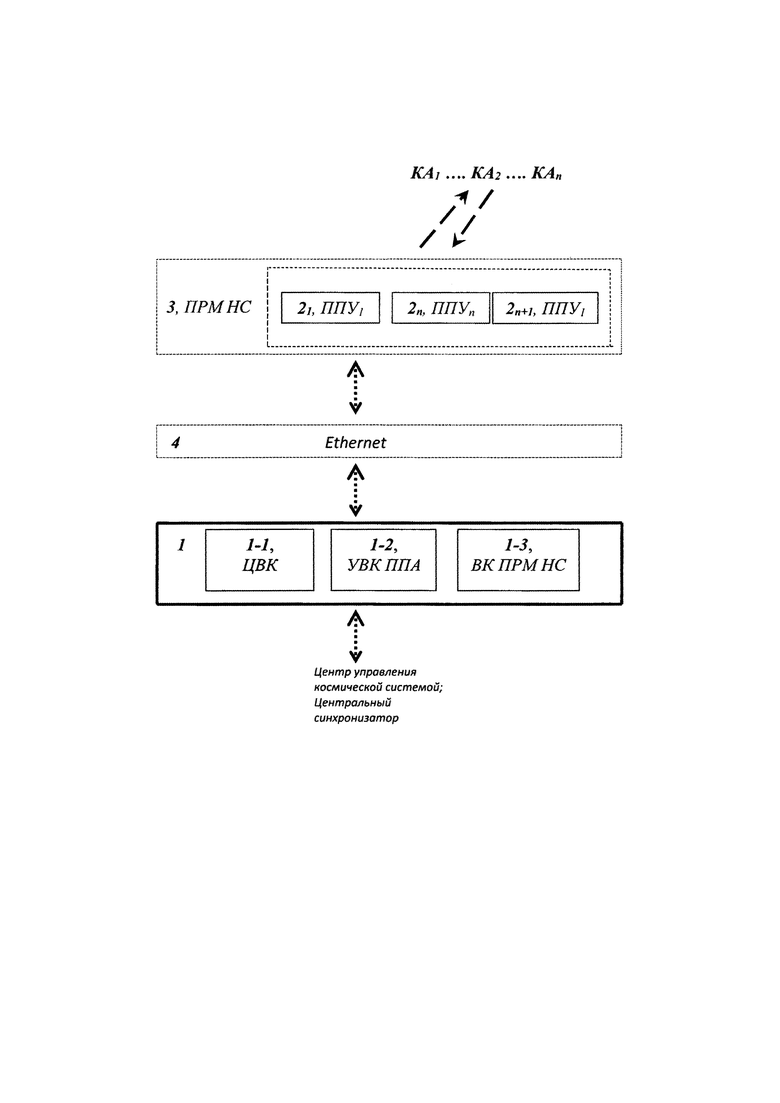
Предложенная наземная система контроля и управления бортовой аппаратурой межспутниковых измерений навигационной системы, преимущественно системы ГЛОНАСС, включает (см. структурную схему) вычислительное оборудование 1, совокупность комплектов приемо-передающей аппаратуры межспутниковой радиолинии данной спутниковой навигационной системы 2 (т.е. антенных постов с двухзеркальной антенной, работающих независимо от системы наведения), подключенных к вычислительному оборудованию 1, комплект аппаратуры приема навигационного сигнала 3. Вычислительное оборудование включает центральный вычислительный комплекс 1-1, управляющий комплекс приемо-передающей аппаратуры 1-2 и вычислительный комплекс приемника навигационных сигналов 1-3, то есть для совокупности разнотипной информации выделены аппаратно самостоятельные вычислительные ресурсы. Данные вычислительные комплексы 1-1, 1-2, 1-3 подключены к коммутатору сети Ethernet и взаимодействуют между собой и комплектами приемо-передающей аппаратуры через данный коммутатор и сеть Ethernet 4, что позволяет задействовать вычислительные ресурсы любого из вычислительных комплексов «в интересах» любого из комплектов приемо-передающей аппаратуры.
Перечисленное выше оборудование наземной системы контроля и управления бортовой аппаратурой межспутниковых измерений размещается на одном или нескольких отдельных командно-измерительных комплексах, исходя из особенностей управления спутниковой навигационной системой, то есть предложенная система контроля и управления может состоять из одной или нескольких наземных станций. Для управления вычислительным оборудованием 1 выделяется необходимое количество автоматизированных рабочих мест.
Количество задействованных комплектов приемо-передающей аппаратуры 2 межспутниковой радиолинии спутниковой навигационной системы в штатном режиме меньше количества космических аппаратов данной системы и определяется управляющим вычислительным комплексом приемо-передающей аппаратуры 1-2, исходя из эфемеридной информации, направления антенн комплектов приемо-передающей аппаратуры. В нештатных режимах, характеризующихся значительной нагрузкой и большим объемом передаваемой информации, количество комплектов приемо-передающей аппаратуры 2 может стать равным количеству космических аппаратов спутниковой навигационной системы. Предложенная наземная система контроля и управления бортовой аппаратурой межспутниковых измерений также может быть использована для управления бортовым информационно-навигационным комплексом, то есть аппаратные средства системы позволяют решить задачи по управлению как бортовой аппаратурой межспутниковой информации, так и бортовым информационно-навигационным комплексом, использование аппаратных средств системы в данном случае будет аналогичным.
Центральный вычислительный комплекс 1-1 связан с центром управления спутниковой навигационной системы и подключен к устройству формирования опорной частоты (к шкале времени), которое, в свою очередь, подключено к центральному синхронизатору, то есть собственная шкала времени навигационной станции привязана к шкале времени центрального синхронизатора.
При работе центрального вычислительного комплекса 1-1, то есть при работе его аппаратных и программных средств, выполняются следующие функции – действия по управлению оборудованием спутниковой навигационной системы:
- планирование выбора антенных систем комплектов приемо-передающей аппаратуры 2;
- расчет целевых указаний для всех антенн в соответствии с планом сеансов связи;
- расчет прогнозируемых значений дальности и радиальной скорости до передающих космических аппаратов на начало каждого сеанса;
- прием измерений текущих навигационных параметров и навигационной информации с космического аппарата;
- контроль привязки собственной шкалы времени к шкале времени центрального синхронизатора;
- прием и обработка метеорологических параметров в окрестности наземной станции (отдельного командно-измерительного комплекса);
- расчет и передача в управляющий вычислительный комплекс приемо-передающей аппаратуры 1-2 на бортовую аппаратуру межспутниковых измерений либо информационно-навигационного комплекса ионосферных и тропосферных поправок к измеренным значениям псевдодальности в составе измерительного кадра;
- комплексная обработка, хранение, представление и документирование результатов работы бортовой аппаратуры межспутниковой информации;
- отображение данных автономного контроля и самопроверки всего комплекса аппаратуры наземной станции (отдельного командно-измерительного комплекса).
Управляющий вычислительный комплекс приемо-передающей аппаратуры 1-2 взаимодействует с центральным вычислительным комплексом 1-1 и управляет комплектами приемо-передающей аппаратуры 2.
При работе управляющего вычислительного комплекса приемо-передающей аппаратуры 1-2, то есть при работе его аппаратных и программных средств, выполняются следующие функции – действия по управлению оборудованием спутниковой навигационной системы:
- приемо-передающей аппаратурой соответствующих комплектов 2;
- выдача целеуказаний на антенную систему комплектов приемо-передающей аппаратуры 2;
- прием от центрального вычислительного комплекса 1-1 команд дистанционного управления;
- выдача в центральный вычислительный комплекс 1-1 посылок с измерениями текущих навигационных параметров по сигналам бортовой аппаратуры межспутниковых измерений и принятым кадрам межспутниковых радиолиний;
- выдача в центральный вычислительный комплекс 1-1 информации функционального контроля, необходимой для дистанционного контроля и управления комплектами приемо-передающей аппаратуры 2.
Вычислительный комплекс приемника навигационных сигналов 1-3 взаимодействует с комплектом аппаратуры приема навигационного сигнала 3, центральным вычислительным комплексом 1-1, управляющим вычислительным комплексом приемо-передающей аппаратуры 1-2.
При работе управляющего вычислительного комплекса приемника навигационных сигналов 1-3, то есть при работе его аппаратных и программных средств, выполняются следующие функции – действия по управлению оборудованием спутниковой навигационной системы:
- обработка измерительных посылок, принятых от унифицированных цифровых приемников навигационных сигналов комплекта аппаратуры приема навигационного сигнала 3 (комплекты аппаратуры приема навигационного сигнала 3 также включают две всенаправленные антенны навигационного сигнала, входное приемное устройство навигационного канала, устройство размножения навигационного сигнала);
- выдача результатов измерений текущих навигационных параметров по навигационным спутникам в центральный вычислительный комплекс 1-1,
- расчет ионосферных поправок и их выдача в согласованных форматах в центральный вычислительный комплекс 1-1;
- выдача цифровой информации, выделенной из навигационного кадра и согласованной в форматах в центральном вычислительном комплексе 1-1 и управляющем вычислительном комплексе приемо-передающей аппаратуры 1-2.
Аппаратный состав комплекта приемо-передающей аппаратуры межспутниковой радиолинии предложенной спутниковой навигационной системы 2 может быть описан следующим образом.
Приемное устройство сигналов межспутниковой радиолинии включает входной усилитель-конвертер бортовой аппаратуры межспутниковой информации и унифицированный цифровой приемник бортовой аппаратуры межспутниковой информации. Входной усилитель-конвертор бортовой аппаратуры межспутниковой информации состоит из малошумящего усилителя, гетеродина и смесителя. Передающее устройство сигналов межспутниковой радиолинии спутниковой навигационной системы состоит из конвертора f3 и усилителя мощности. Сигнал с антенной системы поступает на антенный переключатель и после него на входной усилитель-конвертор. После усиления на малошумящем усилителе сигнал разветвляется на три направления на делителе мощности и отфильтровывается полосовыми фильтрами с образованием трех частотных каналов. Стабилизированный сигнал промежуточной частоты по трем каналам поступает на унифицированные цифровые приемники трех диапазонов. Далее сигнал поступает на вход аналого-цифрового преобразователя, с выхода которого поступает на ПЛИС для измерения псевдодальности до космического аппарата, слежения за несущей частотой, измерения частоты Доплера, фазы несущей и выделения цифровой информацию. Полученная в результате обработки в ПЛИС информация через порт Ethernet поступает комплекс приемника навигационных сигналов 1-3, где происходит ее дальнейшая обработка. Информация, обработанная в комплексе 1-3 и в управляющем вычислительном комплексе приемо-передающей аппаратуры 1-2, поступает в центральный вычислительный комплекс 1-1 для последующей выдачи через систему сбора и передачи данных в центр управления космической системой.
Таким образом, при работе предложенной наземной системы контроля и управления бортовой аппаратурой межспутниковых измерений навигационной системы, расположенной на одной либо нескольких наземных станциях (отдельном командно-измерительном комплексе) выполняется
- отслеживание измерительного сигнала бортовой аппаратуры межспутниковой информации либо бортового информационно-навигационного комплекса космических аппаратов, находящихся в зоне радиовидимости;
- проведение беззапросных измерений по каналу бортовой аппаратуры межспутниковой информации либо бортового информационно-навигационного комплекса космических аппаратов;
- прием информационных кадров межспутниковой радиолинии с контролем параметров сигнала;
- проведение беззапросных измерений текущих навигационных параметров, а также прием навигационной информации;
- измерения метеорологических параметров;
- расчет и передача на бортовую аппаратуру межспутниковой информации либо бортовой информационно-навигационный комплекс ионосферных и тропосферных привязок к измеренным значениям псевдодальности;
- прием информационных кадров межспутниковой радиолинии по каналам системы сбора и передачи данных из центра управления космической системой;
- передача на бортовую аппаратуру межспутниковой информации либо бортовой информационно-навигационный комплекс информационных кадров межспутниковой радиолинии, сформированных на наземной станции бортовой аппаратуры межспутниковой информации;
- прием от центра управления команд для дистанционного управления во всех режимах;
- информационное взаимодействие с сетью беззапросных измерительных средств наземного комплекса управления космической системы.
Таким образом, предложена наземная система контроля и управления бортовой аппаратурой межспутниковых измерений навигационной системы, характеризующаяся управляемостью работы при минимизации количества оборудования задействованного для управления космическими аппаратами. Предложенная система может быть использована при совершенствовании спутниковой навигационной системы ГЛОНАСС, а также аналогичных спутниковых навигационных систем, уже существующих в настоящее время либо предполагаемых к развертыванию и практическому использованию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Спутниковая система, управляемая по межспутниковой радиолинии | 2018 |
|
RU2690966C1 |
| Способ управления полетом низкоорбитального космического аппарата через навигационные космические аппараты системы ГЛОНАСС с применением резервного канала передачи с кодовым разделением командно-программной информации | 2022 |
|
RU2800530C1 |
| Бортовой информационно-навигационный комплекс | 2017 |
|
RU2663680C1 |
| Применение триангуляционных методов измерений в системе ГЛОНАСС. | 2015 |
|
RU2669042C2 |
| Система контроля целостности глобальной навигационной спутниковой системы, например, системы ГЛОНАСС, с использованием межспутниковых измерений | 2023 |
|
RU2828675C1 |
| СПОСОБ КОСМИЧЕСКОЙ СВЯЗИ | 2012 |
|
RU2549832C2 |
| КОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЗА ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2284550C2 |
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2011 |
|
RU2477836C1 |
Изобретение относится к спутниковым навигационным системам, а именно к оборудованию наземного комплекса управления данных систем. Технический результат состоит в повышении качества контроля навигационных систем. Для этого наземная система контроля и управления бортовой аппаратурой межспутниковых измерений включает вычислительное оборудование в составе центрального вычислительного комплекса, управляющего комплекса приемо-передающей аппаратуры, вычислительного комплекса приемника навигационных сигналов. Центральный вычислительный комплекс связан с центром управления спутниковой навигационной системы и подключен к устройству формирования опорной частоты, которое, в свою очередь, подключено к центральному синхронизатору. Управляющий вычислительный комплекс приемо-передающей аппаратуры взаимодействует с центральным вычислительным комплексом и, по меньшей мере, одним упомянутым комплектом приемо-передающей аппаратуры. Вычислительный комплекс приемника навигационных сигналов взаимодействует с, по меньшей мере, одним комплектом аппаратуры приема навигационного сигнала, центральным вычислительным комплексом, управляющим вычислительным комплексом приемо-передающей аппаратуры. Вычислительное оборудование подключено к коммутатору сети Ethernet. Количество задействованных комплектов приемо-передающей аппаратуры межспутниковой радиолинии спутниковой навигационной системы меньше или равно количеству космических аппаратов спутниковой навигационной системы и определяется управляющим вычислительным комплексом приемо-передающей аппаратуры. 4 з.п. ф-лы, 1 ил.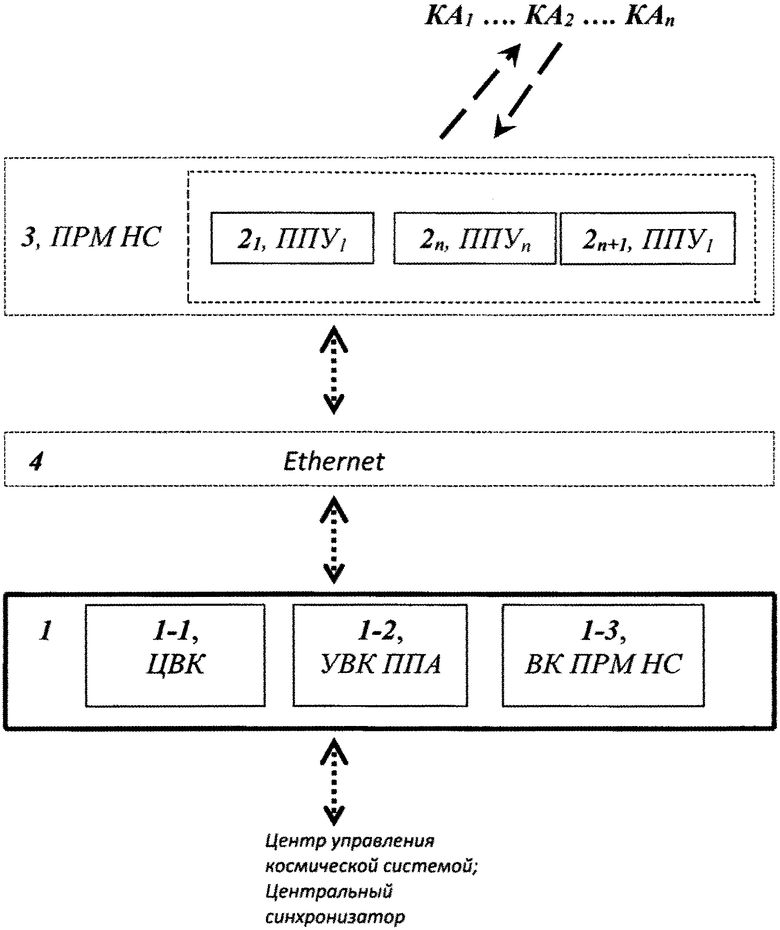
1. Наземная система контроля и управления бортовой аппаратурой межспутниковых измерений навигационной системы, включающая
вычислительное оборудование, подключенное к устройству формирования опорной частоты;
по меньшей мере, один комплект приемо-передающей аппаратуры межспутниковой радиолинии спутниковой навигационной системы, связанной с вычислительным оборудованием и подключенной к устройству формирования опорной частоты;
по меньшей мере, один комплект аппаратуры приема навигационного сигнала, отличающаяся тем, что
упомянутое вычислительное оборудование включает
a) центральный вычислительный комплекс, связанный с центром управления спутниковой навигационной системы и подключенный к устройству формирования опорной частоты, которое, в свою очередь, подключено к центральному синхронизатору,
b) управляющий вычислительный комплекс приемо-передающей аппаратуры, взаимодействующий с центральным вычислительным комплексом и с, по меньшей мере, одним упомянутым комплектом приемо-передающей аппаратуры,
c) вычислительный комплекс приемника навигационных сигналов, взаимодействующий с, по меньшей мере, одним комплектом аппаратуры приема навигационного сигнала, центральным вычислительным комплексом, управляющим вычислительным комплексом приемо-передающей аппаратуры,
подключенные к коммутатору сети Ethernet и взаимодействующие между собой и с, по меньшей мере, одним комплектом приемо-передающей аппаратуры через данный коммутатор и сеть Ethernet,
причем количество задействованных комплектов приемо-передающей аппаратуры межспутниковой радиолинии спутниковой навигационной системы не превышает количество космических аппаратов спутниковой навигационной системы и определяется управляющим вычислительным комплексом приемо-передающей аппаратуры.
2. Наземная система контроля и управления бортовой аппаратурой межспутниковых измерений по п. 1, отличающаяся тем, что количество задействованных комплектов приемо-передающей аппаратуры межспутниковой радиолинии спутниковой навигационной системы меньше количества космических аппаратов спутниковой навигационной системы.
3. Наземная система контроля и управления бортовой аппаратурой межспутниковых измерений по п. 1, отличающаяся тем, что количество задействованных комплектов приемо-передающей аппаратуры межспутниковой радиолинии спутниковой навигационной системы равно количеству космических аппаратов спутниковой навигационной системы.
4. Наземная система контроля и управления бортовой аппаратурой межспутниковых измерений по п. 1, отличающаяся тем, что обеспечивает управление бортовым информационно-навигационным комплексом.
5. Наземная система контроля и управления бортовой аппаратурой межспутниковых измерений по любому из пп. 1-4, отличающаяся тем, что размещена на, по меньшей мере, одном отдельном командно-измерительном комплексе.
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СУДОВОЙ НАВИГАЦИИ | 2010 |
|
RU2444026C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| US7710309 B2, 04.05.2010. | |||

