Изобретение относится к области радиолокации и радионавигации и может быть использовано при оценке времени задержки распространения сигнала от навигационного космического аппарата до аппаратуры потребителя, а также при синтезе радиолокационного изображения в многопозиционной радиолокационной системе с синтезированной апертурой антенны, использующей сигнал навигационной системы для подсветки земной поверхности.
Главным фактором, ограничивающим разрешающую способность и точность оценки времени задержки сигнала, является ширина полосы и слабый уровень принимаемого сигнала навигационного спутника.
Известен способ корреляционного приема сигнала системы ГЛОНАСС с частотным разделением [1, 2], когда для обработки сигнала каждого спутника используется отдельный коррелятор, на первый вход которого подается сигнал одного спутника, прогетеродинированный частотой гетеродина с учетом номера литера несущей частоты в используемом частотном диапазоне L1 или L2, а на второй вход коррелятора подается опорный сигнал в виде дальномерного кода стандартной или высокой точности, сформированный с учетом ожидаемого значения задержки сигнала и доплеровского сдвига частоты. На выходе коррелятора формируется взаимнокорреляционная функция принимаемого и опорного сигналов, ширина корреляционного максимума которой обратно пропорциональна полосе частот принимаемого сигнала.
Известен способ бескодового приема сигналов спутниковых навигационных систем [2, 3], при котором принимаемый сигнал навигационного спутника гетеродинируется и затем умножается сам на себя. В результате все модуляции исключаются, происходит удвоение частоты и обеспечивается возможность слежения за доплеровским сдвигом и фазой сигнала.
Первый рассмотренный способ корреляционной обработки сигнала системы ГЛОНАСС является наиболее близким по п. 1 формулы изобретения для совместной обработки сигналов двух спутников и выбран в качестве прототипа.
Достигаемый технический результат заключается в увеличении отношения сигнал/шум, повышении разрешающей способности и точности оценки времени задержки сигнала за счет расширения полосы сигнала, принимаемого одновременно от двух космических аппаратов с различными литерами, и соответствующего сужения главного максимума корреляционной функции.
Новизна изобретения заключается в новом подходе к способу приема сигнала системы ГЛОНАСС, при котором сигналы двух спутников с частотным разделением рассматриваются и обрабатываются как единый сигнал, полоса которого шире полосы сигнала каждого спутника на величину межлитерного смещения несущей частоты одного спутника относительно другого.
Изобретательский уровень характеризуется применением известного ранее математического аппарата цифровой обработки сигналов с учетом метода частотного уплотнения сигналов и высокой степени частотно-временной синхронизации навигационных сигналов в системе ГЛОНАСС, для решения задачи повышения отношения сигнал/шум, разрешающей способности и точности оценки времени задержки распространения сигнала.
Промышленная применимость - данное изобретение является промышленно применимым при разработке перспективных образцов навигационной аппаратуры потребителя и многопозиционных радиолокационных систем с синтезированной апертурой антенны, использующей сигналы навигационной системы для подсветки земной поверхности.
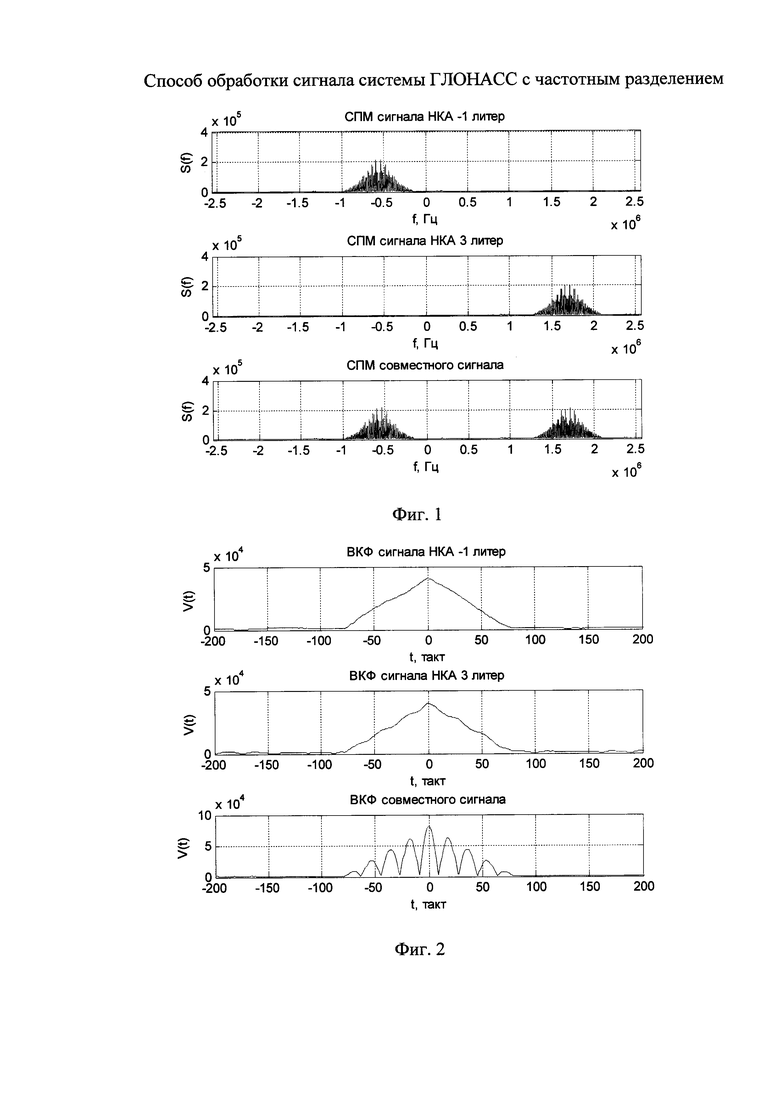
Проведенная экспериментальная обработка сигналов спутников с литерами -1 и 3 в частотном диапазоне L1 системы ГЛОНАСС с использованием предложенного способа корреляционной обработки подтвердила повышение разрешающей способности и точности оценки времени задержки сигнала. На фиг. 1 приведены спектральные плотности средней мощности (СПМ) сигналов для каждого навигационного космического аппарата отдельно и совместная спектральная плотность средней мощности для аппаратов с литерами -1 и 3, которые показывают, что ширина спектра увеличилась приблизительно в 4 раза. На фиг. 2 приведены графики взаимно-корреляционных функций сигналов для каждого навигационного космического аппарата отдельно и взаимно-корреляционных функций совместного сигнала аппаратов с литерами -1 и 3, которые показывают, что ширина главного максимума уменьшилась в 9 раз. Обработка проводилась в среде Matlab R2009a с использованием реального сигнала, записанного 13 марта 2015 года в 10 часов 02 минуты 28 секунд с частотой дискретизации 40 МГц.
Примечание:
Источники информации
1. ГЛОНАСС. Принципы построения и функционирования / под. ред. А.И. Перова, В.Н. Харисова. М.: Радиотехника, 2010.
2. Антонович К.М. Использование спутниковых радионавигационных систем в геодезии. В 2 т. - М.: ФГУП «Картгеоцентр», 2005.
3. Латюк А.Ф., Дубинко Ю.С. Способ и устройство бескодового приема сигналов спутниковых навигационных систем. Патент на изобретение RU №2363099.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАДИОНАВИГАЦИОННЫХ ПАРАМЕТРОВ СИГНАЛА КОСМИЧЕСКОЙ СИСТЕМЫ НАВИГАЦИИ, РАССЕЯННОГО ВОЗДУШНОЙ ЦЕЛЬЮ, И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2591052C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2016 |
|
RU2624634C1 |
| Система для определения скорости распространения и направления прихода ионосферного возмущения | 2016 |
|
RU2655164C2 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И МЕСТОПОЛОЖЕНИЯ СПУТНИКА ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ГЛОНАСС И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518174C2 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| Способ формирования дальностного портрета, получаемого на основе использования сигналов с перестройкой частоты, от импульса к импульсу, за счет построения характеристики изменения радиальной скорости воздушного объекта | 2023 |
|
RU2815730C1 |
| Способ измерения дальности | 2017 |
|
RU2642430C1 |
| Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования Земли | 2016 |
|
RU2624460C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПОРНОГО СИГНАЛА ДЛЯ СОВМЕСТНОЙ ОБРАБОТКИ СИГНАЛОВ СТАНДАРТНОЙ И ВЫСОКОЙ ТОЧНОСТИ СИСТЕМЫ ГЛОНАСС | 2015 |
|
RU2602509C1 |
Изобретение относится к области радиолокации и радионавигации. Сущность изобретения заключается в совместной обработке сигналов двух навигационных космических аппаратов с различными литерами несущих частот в одном канале аппаратуры приема сигналов системы ГЛОНАСС. Достигаемый технический результат заключается в повышении разрешающей способности и точности оценки времени задержки сигнала за счет расширения полосы сигнала, принимаемого одновременно от двух космических аппаратов с различными литерами, и соответствующего сужения главного максимума корреляционной функции. 2 ил.
Способ обработки навигационных сигналов космических аппаратов системы ГЛОНАСС с частотным разделением, использующий способ корреляционной обработки, отличающийся тем, что на первый вход коррелятора подают принимаемый навигационный сигнал, прогетеродинированный частотой гетеродина, равной частоте нулевого литера соответствующего диапазона L1 или L2, а на второй вход коррелятора подают опорный сигнал Snm(t), сформированный для каждой пары спутников с литерами несущей частоты n и m, путем суммирования двух дальномерных кодов G(t), смещенных во временной области на ожидаемые задержки сигнала tn и tm, а в частотной области на величину соответствующего литерного смещения частоты fn и fm и прогнозируемую частоту доплеровского смещения fДn и fДm, математическое представление которого имеет следующий вид:
Snm(t)=G(t-tn)ехр(2рi(fn+fДn)t)+G(t-tm)ехр(2рi(fm+fДm)t).
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2004 |
|
RU2280260C1 |
| 0 |
|
SU155152A1 | |
| ЦИФРОВОЙ ГЕНЕРАТОР ДЛЯ ЦИФРОВЫХ СЛЕДЯЩИХ СИСТЕМ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ | 2000 |
|
RU2180125C1 |
| Универсальный съемник | 1961 |
|
SU155151A1 |
| US 6873910 B2, 29.03.2005 | |||
| WO 2005086459 A1, 15.09.2005 | |||
| Способ футеровки центробежной формы центробежная форма | 1974 |
|
SU501829A1 |

