Область техники
[0001] Настоящее раскрытие относится к способу управления транспортным средством с содействием при вождении и системе управления для транспортного средства с содействием при вождении.
Уровень техники
[0002] Патентный документ 1 имеет задачу предоставить систему, способную полностью управлять автоматизированными задачами в транспортном средстве, и раскрывает отказоустойчивую архитектуру E/E для автоматического вождения с использованием следующего решения. То есть первый вычислительный блок (1) имеет интерфейс для контакта по меньшей мере с одним датчиком (3) и по меньшей мере с одним исполнительным механизмом (4). Второй вычислительный блок (2) имеет интерфейс для контакта по меньшей мере с одним датчиком (3) и по меньшей мере с одним исполнительным механизмом (4). Первый вычислительный блок (1) и второй вычислительный блок (2) образуют соединение друг с другом через интерфейс (5). Первый вычислительный блок (1) и/или второй вычислительный блок (2) и/или исполнительный механизм (4) выполнены с возможностью определять, может ли первый или второй вычислительный блок (1, 2) эффективно приводить в действие и управлять исполнительным механизмом (4).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Опубликованная заявка на патент Японии № 2016-81534
Сущность изобретения
Проблема, решаемая изобретением
[0004] Отказоустойчивая E/E-архитектура, раскрытая в Патентном документе 1, имеет избыточную конфигурацию, благодаря чему, даже если один из контроллеров выходит из строя, та же операция, которая выполнялась до возникновения отказа (сбоя), может продолжать выполняться. Следовательно, должна быть сконфигурирована система управления, имеющая множество одинаковых контроллеров и исполнительных механизмов.
[0005] Ввиду проблемы, описанной выше, задача настоящего раскрытия сущности состоит в том, чтобы реализовать при возникновении отказа в любом из множества контроллеров, установленных в транспортном средстве, рабочую функцию, которая эквивалентна рабочей функции, которая потеряна из-за отказа, без создания избыточной конфигурации системы управления.
Средство для решения проблемы
[0006] Чтобы реализовать вышеописанную задачу, настоящее раскрытие представляет собой способ управления транспортным средством с содействием при вождении, включающим в себя множество контроллеров, которые совместно используют рабочие функции при управлении содействием при вождении. На основе архитектуры, которая реализует эквивалентные рабочие функции с каждой группой контроллеров, множество контроллеров делится на множество групп контроллеров для построения топологии сети. Способ управления в соответствии с этой топологией сети следующий. Определяется, произошел ли отказ в каком-либо из множества контроллеров. После определения того, что отказ произошел в любом из множества контроллеров, информация об отказе отправляется в нормальную группу контроллеров, отличную от отказавшей группы контроллеров, к которой принадлежит отказавший контроллер, через сетевую линию связи. Когда нормальная группа контроллеров принимает информацию об отказе через сетевую линию связи, контроллеры, составляющие нормальную группу контроллеров, выполняют режим отказа для дублирования рабочей функции отказавшей группы контроллеров до тех пор, пока водитель не вернется к управлению.
Эффект изобретения
[0007] В результате, если отказ происходит в любом из множества контроллеров, установленных в транспортном средстве, можно реализовать рабочую функцию, которая эквивалентна рабочей функции, которая потеряна из-за отказа, с момента, когда произошел отказ, до момента, когда водитель возвращается к управлению, без использования сконфигурированной избыточно системы управления.
Краткое описание чертежей
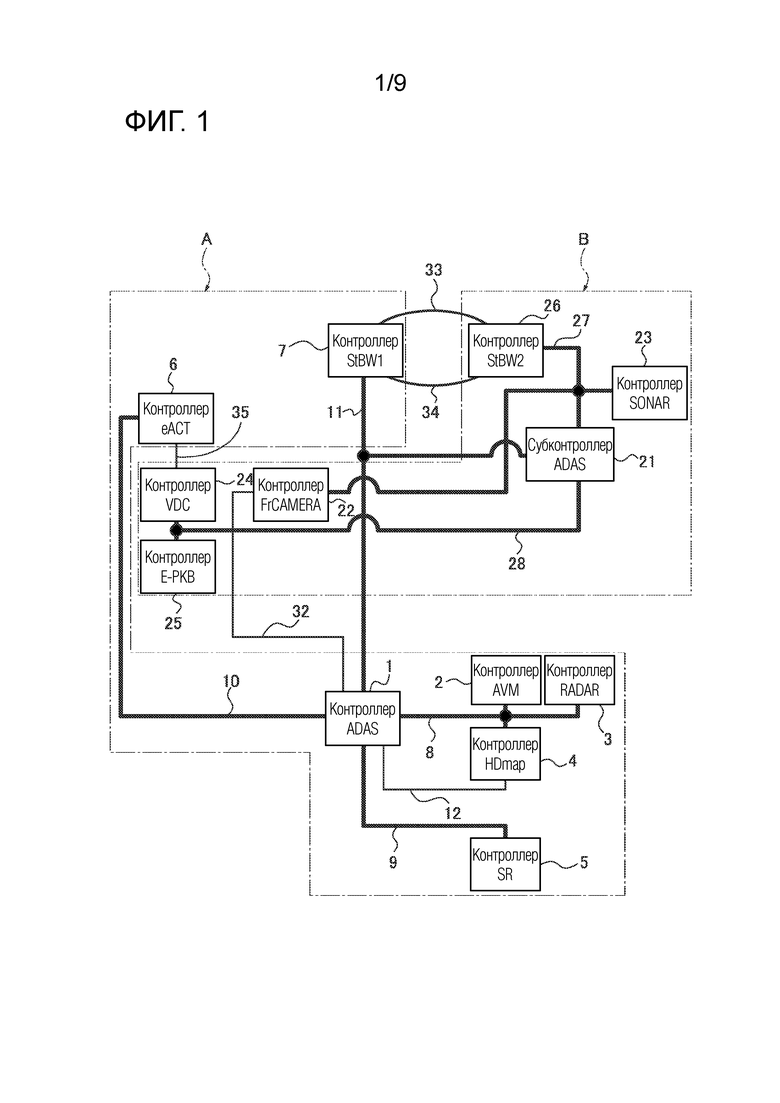
[0008] Фиг. 1 - общая схема системы управления, иллюстрирующая топологию сети, в которой множество контроллеров, установленных в транспортном средстве с автономным вождением, к которому применяются способ управления и система управления первого варианта осуществления, разделены на первую группу контроллеров и вторую группу контроллеров.
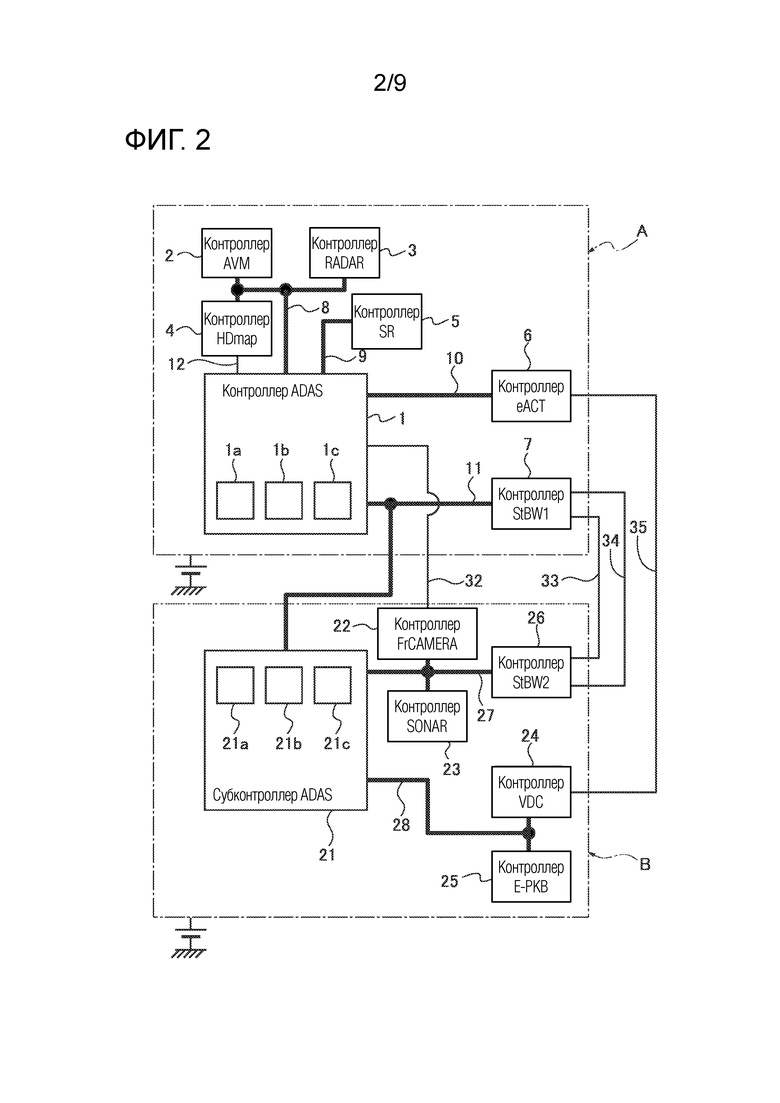
Фиг. 2 - блок-схема управления, иллюстрирующая конфигурацию отказоустойчивой системы управления, состоящей из контроллера ADAS, включенного в первую группу контроллеров, и субконтроллера ADAS, включенного во вторую группу контроллеров, из множества контроллеров.
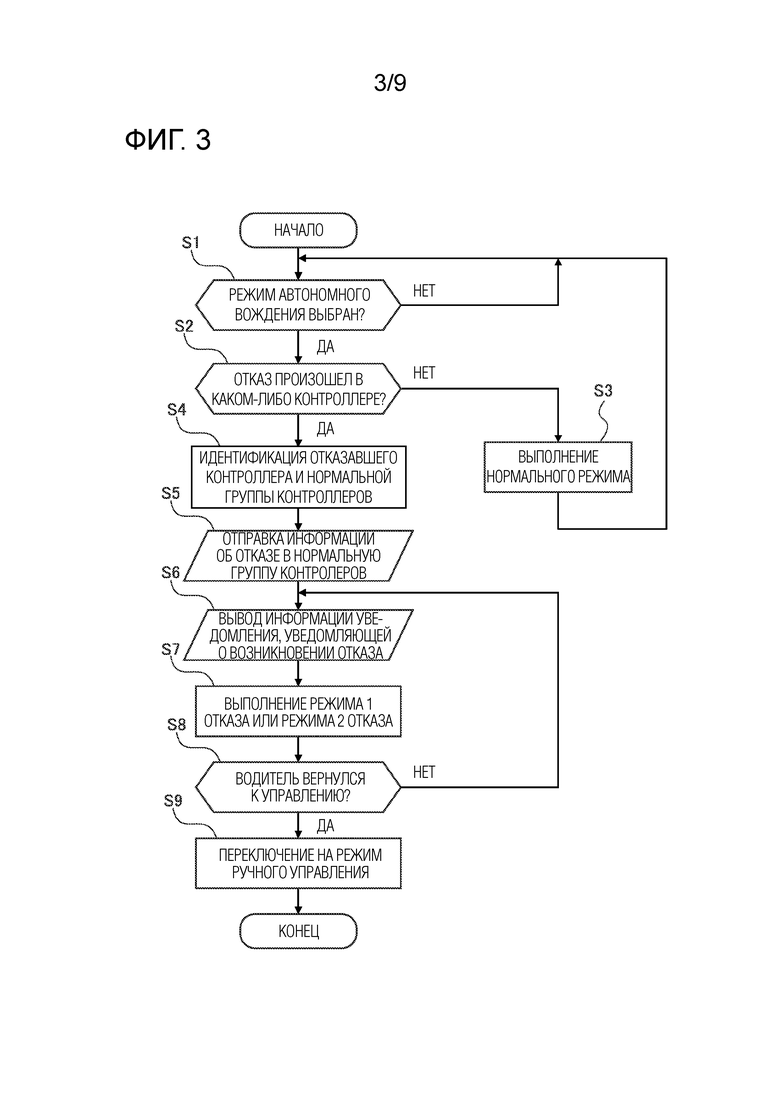
Фиг. 3 - блок-схема, иллюстрирующая последовательность операций отказоустойчивого управления, которая выполняется системой управления согласно первому варианту осуществления, когда выбран режим автономного вождения.
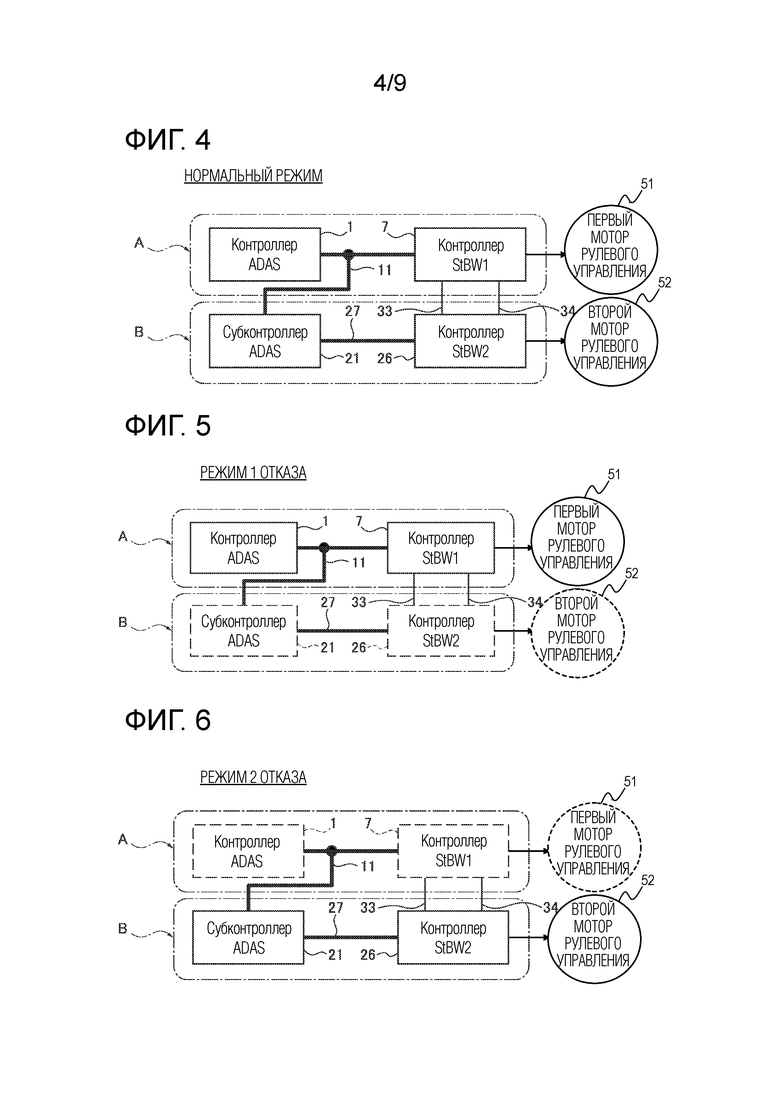
Фиг. 4 - пояснительный вид работы, иллюстрирующий нормальный режим системы рулевого управления, которая разделяет рабочую функцию исполнительного механизма рулевого управления.
Фиг. 5 - пояснительный вид работы, иллюстрирующий режим 1 отказа в системе рулевого управления.
Фиг. 6 - пояснительный вид работы, иллюстрирующий режим 2 отказа в системе рулевого управления.
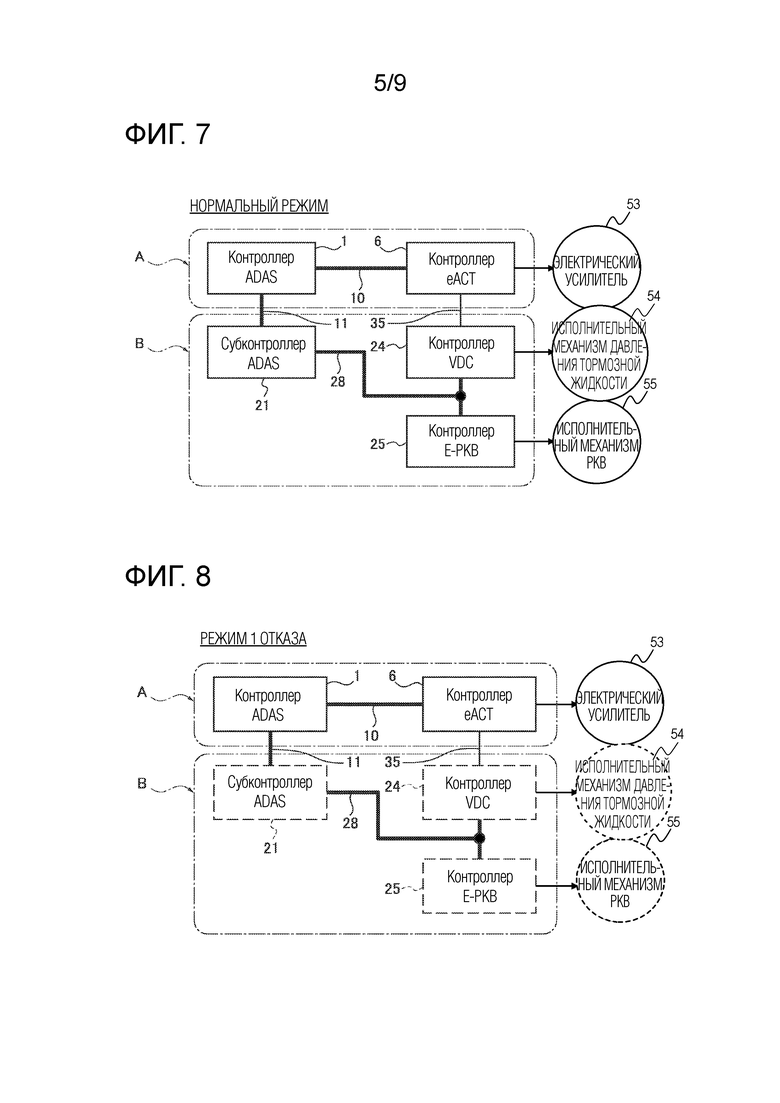
Фиг. 7 - пояснительный вид работы, иллюстрирующий нормальный режим системы управления тормозом, которая разделяет рабочую функцию тормозного исполнительного механизма.
Фиг. 8 - пояснительный вид работы, иллюстрирующий режим 1 отказа в системе управления тормозом.
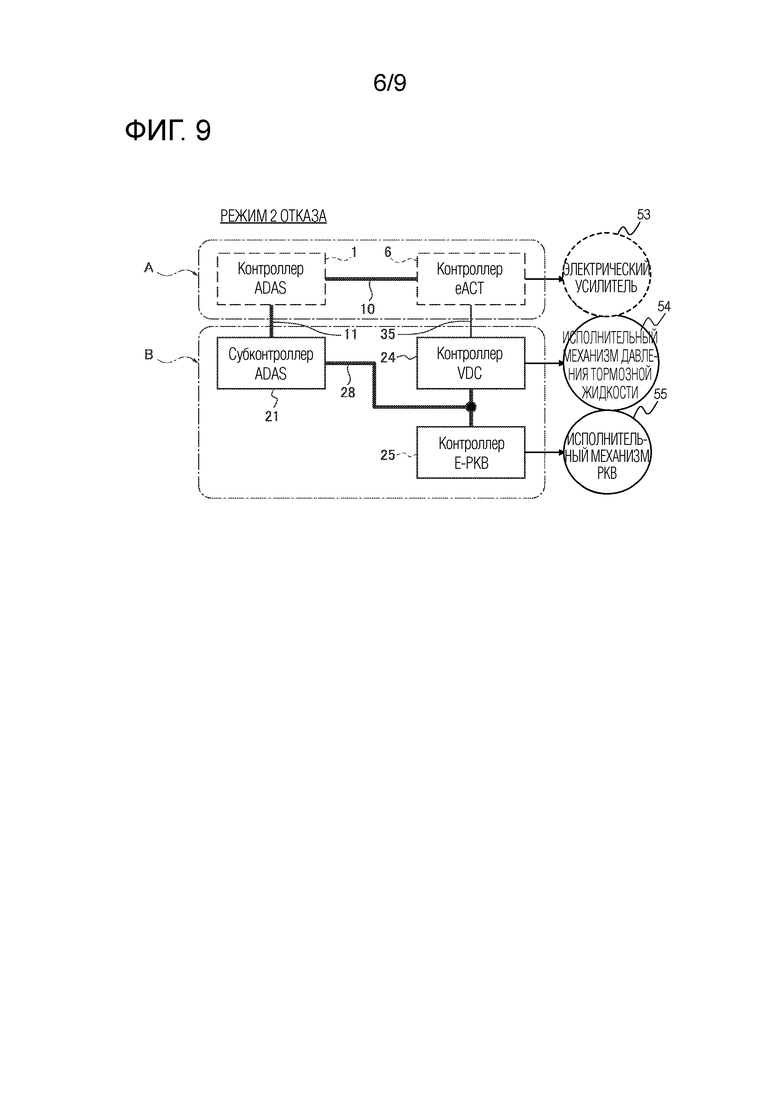
Фиг. 9 - пояснительный вид работы, иллюстрирующий режим 2 отказа в системе управления тормозом.
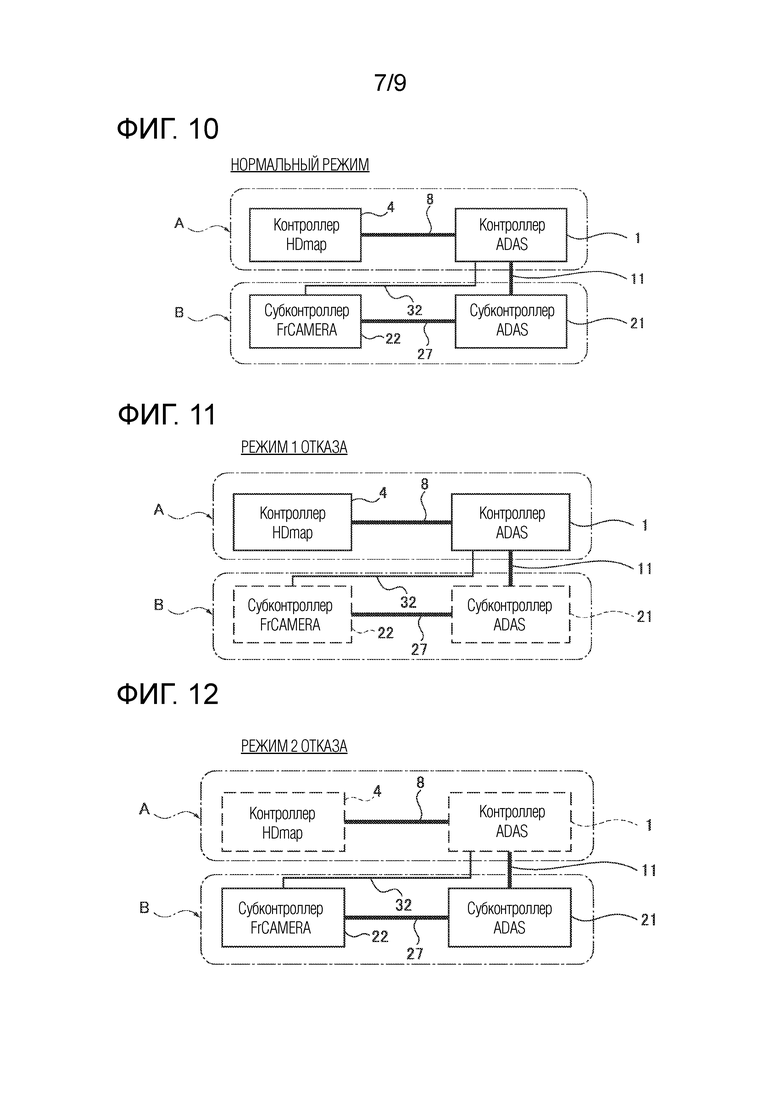
Фиг. 10 - пояснительный вид работы, иллюстрирующий нормальный режим системы управления распознаванием полосы движения, которая разделяет рабочую функцию распознавания полосы движения рассматриваемого транспортного средства.
Фиг. 11 - пояснительный вид работы, иллюстрирующий режим 1 отказа в системе управления распознаванием полосы движения.
Фиг. 12 - пояснительный вид работы, иллюстрирующий режим 2 отказа в системе управления распознаванием полосы движения.
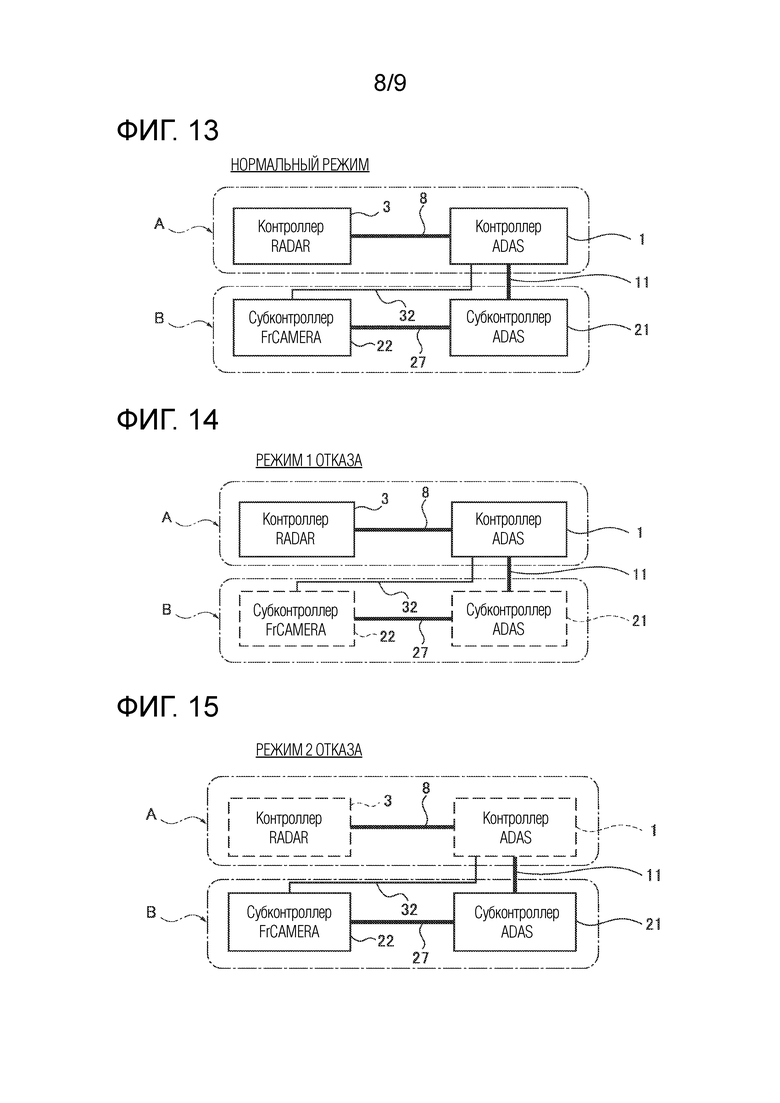
Фиг. 13 - пояснительный вид работы, иллюстрирующий нормальный режим системы управления распознаванием препятствий впереди, которая разделяет рабочую функцию распознавания препятствий впереди рассматриваемого транспортного средства.
Фиг. 14 - пояснительный вид работы, иллюстрирующий режим 1 отказа в системе управления распознаванием препятствий впереди.
Фиг. 15 - пояснительный вид работы, иллюстрирующий режим 2 отказа в системе управления распознаванием препятствий впереди.
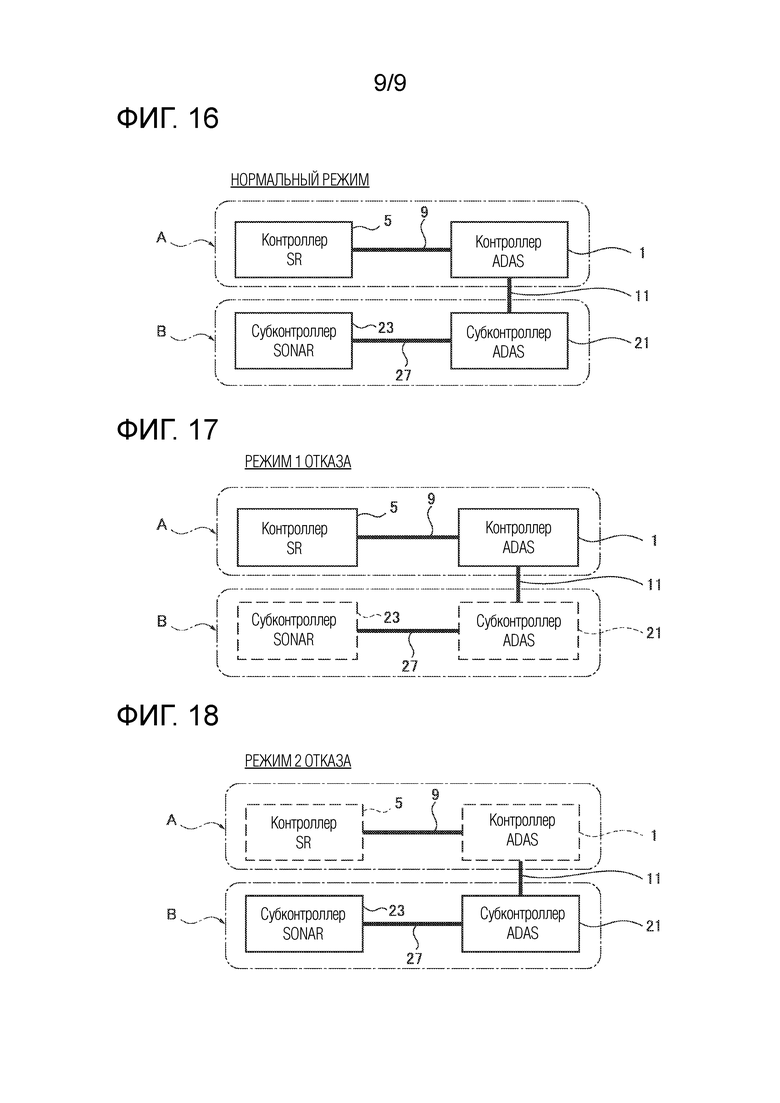
Фиг. 16 - пояснительный вид работы, иллюстрирующий нормальный режим системы управления распознаванием боковых препятствий, которая разделяет рабочую функцию распознавания боковых препятствий рассматриваемого транспортного средства.
Фиг. 17 - пояснительный вид работы, иллюстрирующий режим 1 отказа в системе управления распознаванием боковых препятствий.
Фиг. 18 - пояснительный вид работы, иллюстрирующий режим 2 отказа в системе управления распознаванием боковых препятствий.
Варианты осуществления для реализации изобретения
[0009] Вариант осуществления для реализации способа управления и устройства управления для транспортного средства с содействием при вождении согласно настоящему раскрытию будет описан ниже на основе первого варианта осуществления, проиллюстрированного на чертежах.
Первый вариант осуществления
[0010] Способ управления и система управления согласно первому варианту осуществления применяются к транспортному средству с автономным вождением (один пример транспортного средства с содействием при вождении), которое реализует автономное вождение в одиночной полосе движения на выделенной для автомобилей дороге. «Общая конфигурация системы управления» и «конфигурация отказоустойчивой системы управления» будут описаны отдельно ниже относительно конфигурации первого варианта осуществления.
[0011] [Общая конфигурация системы]
Фиг. 1 иллюстрирует топологию сети, в которой множество контроллеров, установленных в транспортном средстве с автономным вождением, к которому применяется способ управления и система управления первого варианта осуществления, разделены на первую группу A контроллеров и вторую группу B контроллеров. Общая конфигурация системы будет описана со ссылкой на фиг. 1.
[0012] Транспортное средство с автономным вождением - это транспортное средство с электрическим приводом, которое реализует автономное вождение по единственной полосе движения на выделенной дороге для автомобилей, когда выбран режим автономного вождения. Например, если отклонение полосы движения обнаруживается во время движения, когда выбран режим автономного вождения, рулевое управление управляется таким образом, чтобы обеспечить движение вблизи центра полосы движения, тем самым содействуя операции рулевого управления водителя. Во время движения, когда выбран режим автономного вождения, управление пространством между транспортными средствами выполняется таким образом, что, когда едущее впереди (предшествующее) транспортное средство не обнаружено, транспортное средство движется со скоростью транспортного средства, заданной водителем, а при обнаружении едущего впереди транспортного средства транспортное средство поддерживает интервал между транспортными средствами, соответствующий скорости транспортного средства, при этом скорость транспортного средства задается водителем в качестве верхнего предела. Когда остановка происходит во время движения следования за едущим впереди транспортным средством на перегруженной дороге, или тому подобное, выполняется управление тормозом с использованием VDC, и если есть запрос на продолжение остановленного состояния, активируется электрический стояночный тормоз. Таким образом, транспортное средство с автономным вождением оснащено технологией, которая поддерживает все из следующего: содействие в управлении рулевым колесом, регулировка ускорения/замедления скорости транспортного средства и парковка/остановка.
[0013] Множество контроллеров, установленных в транспортном средстве с автономным вождением, имеют рабочую функцию исполнительного механизма и рабочую функцию распознавания периферии рассматриваемого транспортного средства в управлении автономным вождением, чтобы реализовать рабочие функции, которые требуются, с использованием всех контроллеров в нормальном режиме. Затем, на основе архитектуры, которая реализует эквивалентные рабочие функции с каждой группой контроллеров, множество контроллеров делятся на первую группу A контроллеров и вторую группу B контроллеров для построения топологии сети. Здесь «топология сети» относится к конфигурации, в которой множество контроллеров сгруппировано на основе концепции проекта реализации эквивалентных рабочих функций с каждой из первой группы A контроллеров и второй группы B контроллеров, которые подключены друг к другу с использованием сетевых линий связи.
[0014] Сетевые линии связи/источники питания первой группы A контроллеров и второй группы B контроллеров электрически и физически независимы. То есть, если отказ происходит в контроллере, включенном в одну группу контроллеров, рабочая функция отказавшей группы контроллеров может быть обеспечена путем дублирования (резервирования) контроллера, включенного в другую группу контроллеров.
[0015] Как показано на Фиг. 1, контроллеры, представленные в первой группе A контроллеров, включают в себя контроллер 1 ADAS, контроллер 2 AVM, контроллер 3 RADAR, контроллер 4 HDmap и контроллер 5 SR. Кроме того, предусмотрены контроллер 6 eACT и контроллер 7 StBW1.
[0016] Как показано на Фиг. 1, сетевые линии связи первой группы A контроллеров включают в себя первую линию 8 связи CAN, вторую линию 9 связи CAN, третью линию 10 связи CAN, четвертую линию 11 связи CAN и первую линию 12 связи LAN.
[0017] То есть первая линия 8 связи CAN соединяет контроллер 1 ADAS, контроллер 2 AVM, контроллер 3 RADAR и контроллер 4 HDmap. Вторая линия 9 связи CAN соединяет контроллер 1 ADAS и контроллер 5 SR. Третья линия 10 связи CAN соединяет контроллер 1 ADAS и контроллер 6 eACT. Четвертая линия 11 связи CAN соединяет контроллер 1 ADAS и контроллер 7 StBW1. Затем первая линия 12 связи LAN соединяет контроллер 1 ADAS и контроллер 4 HDmap.
[0018] Контроллер 1 ADAS представляет собой контроллер, который интегрально выполняет обработку информации в первой группе A контроллеров, включая отказоустойчивое управление, в усовершенствованной системе содействия (помощи) при вождении, которая помогает операции вождения водителя. В этом контроллере 1 ADAS входными данными являются высокоточная информация карты (картографическая информация) от контроллера 4 HDmap и информация о положении рассматриваемого транспортного средства от не проиллюстрированной GPS. Затем, если отклонение полосы движения обнаруживается во время движения по одной полосе движения, когда выбран режим автономного вождения, команда управления для корректировки рулевого управления выводится на контроллер 7 StBW1. Кроме того, если во время движения едущее впереди транспортное средство вклинивается впереди на одной полосе движения и определяется, что замедление рассматриваемого транспортного средства требуется для поддержания интервала между транспортными средствами от едущего впереди транспортного средства, команда управления для замедления рассматриваемого транспортного средства до требуемой скорости транспортного средства выводится на контроллер eACT 6.
«ADAS» - это аббревиатура от «Advanced Driver-Assistance system» («Усовершенствованная система содействия (помощи) водителю»).
[0019] Контроллер 2 AVM совместно использует функцию распознавания препятствий, присутствующих вокруг всей периферии рассматриваемого транспортного средства, парковочных рамок и полос движения, обозначенных белыми линиями, нарисованными на дороге, и т.п., на основе данных изображений камеры, в системе распознавания периферии рассматриваемого транспортного средства (система всенаправленного мониторинга). В контроллере 2 AVM данные изображения от бортовых камер, ориентированных в четырех направлениях (спереди, сзади, слева и справа), вводятся для выполнения обработки изображения; и после определения того, что препятствие присутствует около периферии рассматриваемого транспортного средства, вычисляется расстояние от рассматриваемого транспортного средства до препятствия. Затем информация о положении препятствия на периферии рассматриваемого транспортного средства и информация о расстоянии до препятствия выводятся на контроллер 1 ADAS.
«AVM» - это аббревиатура от «Around View Monitor» («Система кругового обзора»).
[0020] Контроллер 3 RADAR совместно использует функцию распознавания препятствия впереди, которое присутствует в области впереди рассматриваемого транспортного средства, на основе радиолокационного эхо-сигнала в системе распознавания периферии рассматриваемого транспортного средства (передняя радиолокационная система). В контроллер 3 RADAR вводятся сигналы датчиков от переднего радара, ориентированного в направлении вперед от рассматриваемого транспортного средства, и после определения наличия препятствия впереди в области впереди рассматриваемого транспортного средства, вычисляется расстояние от рассматриваемого транспортного средства до препятствия впереди. Затем информация о положении препятствия впереди и информация о расстоянии до препятствия впереди выводятся на контроллер 1 ADAS.
[0021] Контроллер 4 HDmap извлекает данные карты с центром в положении рассматриваемого транспортного средства из бортовой памяти, в которой хранятся данные электронной карты, когда положение рассматриваемого транспортного средства распознается с помощью GPS, и выводит извлеченные данные карты в контроллер 1 ADAS. В данном случае «карта HD» («HD map») относится к высокоточной карте, состоящей из более подробной информации о дороге (например, типа дороги, ширины полосы движения, формы дороги) по сравнению с картой GPS.
[0022] Контроллер 5 SR совместно использует функцию распознавания боковых препятствий, которое присутствует в областях с левой и правой сторон рассматриваемого транспортного средства, на основе радиолокационного эхо-сигнала в системе распознавания периферии рассматриваемого транспортного средства (боковая радиолокационная система). В контроллер 5 SR вводятся сигналы датчиков от боковых радаров, установленных направленными в сторону от рассматриваемого транспортного средства, и после определения наличия бокового препятствия в боковой области рассматриваемого транспортного средства вычисляется расстояние от рассматриваемого транспортного средства до бокового препятствия. Затем информация о положении бокового препятствия и информация о расстоянии до бокового препятствия выводятся в контроллер 1 ADAS. Боковые радары соответственно устанавливаются, например, в переднем левом боковом положении, заднем левом боковом положении, переднем правом боковом и заднем правом боковом положении.
[0023] Контроллер 6 eACT совместно использует рабочую функцию тормозного исполнительного механизма, которая использует электрический усилитель, расположенный между педалью тормоза и главным цилиндром в системе управления тормозом транспортного средства. В контроллере 6 eACT, когда команда управления замедлением вводится из контроллера 1 ADAS, команда управления для замедления транспортного средства до требуемой скорости транспортного средства выводится на мотор электрического усилителя.
[0024] Контроллер 7 StBW1 совместно использует рабочую функцию исполнительного механизма рулевого управления, которая использует первый мотор рулевого управления, предусмотренный в системе рулевого управления с шинами со структурой управления рулением по проводам, в системе рулевого управления в транспортном средстве. В этом контроллере 7 StBW1, когда команда управления для корректировки рулевого управления вводится из контроллера 1 ADAS, команда для задания целевой величины коррекции поворота выводится на первый мотор рулевого управления. Здесь «StBW» относится к системе управления рулением по проводам, в которой система управления с рулевым колесом и система рулевого управления с шинами могут быть механически разделены через муфту рулевого управления.
[0025] Здесь структура управления рулением по проводам может быть разделена на систему управления с рулевым колесом и систему рулевого управления с шинами с использованием муфты рулевого управления. Кроме того, конструкция имеет «режим SBW», в котором муфта рулевого управления выключена, и «режим EPS (режим рулевого управления с электрическим усилителем)», в котором муфта рулевого управления включена. Система управления с рулевым колесом имеет мотор силы реакции для передачи силы реакции рулевого управления на рулевое колесо, когда выбран «режим SBW». Система рулевого управления с шинами включает в себя первый мотор рулевого управления, который вращает шины, когда выбран «режим SBW», и второй мотор рулевого управления, который передает вспомогательный крутящий момент системе рулевого управления, когда выбран «режим EPS».
[0026] Как показано на Фиг.1, контроллеры, представленные во второй группе B контроллеров, представляют собой субконтроллер 21 ADAS, контроллер 22 FrCAMERA и контроллер 23 SONAR. Кроме того, предусмотрены контроллер 24 VDC, контроллер 25 E-PKB и контроллер 26 StBW2.
[0027] Как показано на Фиг.1, сетевые линии связи второй группы В контроллеров представляют собой пятую линию 27 связи CAN и шестую линию 28 связи CAN.
[0028] То есть пятая линия 27 связи CAN соединяет субконтроллер 21 ADAS, контроллер 22 FrCAMERA, контроллер 23 SONAR и контроллер 26 StBW2. Шестая линия 28 связи CAN соединяет субконтроллер 21 ADAS, контроллер 24 VDC и контроллер 25 E-PKB.
[0029] Субконтроллер 21 ADAS интегрально осуществляет обработку информации во второй группе B контроллеров, включая отказоустойчивое управление, в усовершенствованной системе содействия при вождении, которая содействует операции вождения водителя. Входные данные для субконтроллера 21 ADAS включают в себя информацию о полосе движения и препятствиях от контроллера 22 FrCAMERA и информацию о препятствиях от контроллера 23 SONAR. После определения того, что необходимо избегать препятствия во время движения по одной полосе движения, когда выбран режим автономного вождения, команда давления тормозной жидкости для объезда препятствия с использованием режима замедления рассматриваемого транспортного средства выводится на контроллер 24 VDC. Кроме того, если заданный период времени истек в состоянии остановки и определено, что необходимо перевести транспортное средство в состояние парковки, команда операции парковки выводится на контроллер 25 E-PKB. Когда определено, что вспомогательное усилие рулевого управления требуется во время движения, когда выбран «режим EPS», команда управления для передачи вспомогательного крутящего момента системе рулевого управления выводится на контроллер 26 StBW2.
[0030] Контроллер 22 FrCAMERA совместно использует функцию распознавания препятствий, присутствующих в области впереди рассматриваемого транспортного средства, полос движения, обозначенных белыми линиями, нарисованными на дороге, и т.п., на основе данных изображений камеры, в системе распознавании периферии рассматриваемого транспортного средства (система передней камеры). В контроллере 22 FrCAMERA данные изображения с передней камеры, установленной направленной в направлении вперед от рассматриваемого транспортного средства, вводятся для выполнения обработки изображений, и после определения наличия препятствия перед рассматриваемым транспортным средством вычисляется расстояние между рассматриваемым транспортным средством и препятствием впереди. Затем данные о положении препятствия впереди и данные о расстоянии до препятствия впереди выводятся в субконтроллер 21 ADAS.
[0031] Контроллер 23 SONAR совместно использует функцию распознавания препятствия, которое присутствует около периферии рассматриваемого транспортного средства, на основе эхолокационного сигнала (звуковых волн) в системе распознавания периферии рассматриваемого транспортного средства (бортовая система сонара). В контроллер 23 SONAR вводятся сигналы датчиков от сонаров, установленных направленными в сторону от рассматриваемого транспортного средства, и после определения наличия бокового препятствия в боковой области рассматриваемого транспортного средства вычисляется расстояние от рассматриваемого транспортного средства до бокового препятствия. Затем данные о положении бокового препятствия и данные расстояния до бокового препятствия выводятся на субконтроллер 21 ADAS.
[0032] Контроллер 24 VDC расположен между главным цилиндром и колесным цилиндром и совместно использует рабочую функцию тормозного исполнительного механизма, которая использует исполнительный механизм давления тормозной жидкости с независимым управлением четырьмя колесами, в системе управления тормозом транспортного средства. В контроллере 24 VDC, когда команда давления тормозной жидкости вводится от субконтроллера 21 ADAS, команда для создания поведения предотвращения замедления рассматриваемого транспортного средства, чтобы избежать препятствия, выводится на исполнительный механизм давления тормозной жидкости. «VDC» - это аббревиатура от «Vehicle Dynamics Control» («Управление динамикой транспортного средства»).
[0033] Контроллер 25 E-PKB совместно использует рабочую функцию тормозного исполнительного механизма, которая использует стояночный привод, включенный в механизм стояночного тормоза, предусмотренный в месте расположения выходного вала трансмиссии, в системе управления тормозом транспортного средства. В контроллере 25 E-PKB, когда команда операции парковки вводится из субконтроллера 21 ADAS, команда на блокировку механизма стояночного тормоза с использованием механического зацепления выводится на исполнительный механизм PKB.
[0034] Контроллер 26 StBW2 совместно использует рабочую функцию исполнительного механизма рулевого управления, которая использует второй мотор рулевого управления, предусмотренный в системе рулевого управления с шинами со структурой управления рулением по проводам в системе рулевого управления в транспортном средстве. В контроллере 26 StBW2, когда команда содействия в рулевом управлении вводится из субконтроллера 21 ADAS, команда управления для обеспечения вспомогательного крутящего момента для системы рулевого управления выводится на второй мотор рулевого управления.
[0035] Как показано на Фиг.1, сетевые линии связи, которые соединяют первую группу A контроллеров и вторую группу B контроллеров, представляют собой четвертую линию 11 связи CAN, вторую линию 32 связи LAN, третью линию 33 связи LAN, четвертую линию 34 связи LAN и пятую линию 35 связи LAN.
[0036] То есть четвертая линия 11 связи CAN разветвляется и продолжается до субконтроллера 21 ADAS, чтобы таким образом соединить контроллер 1 ADAS и субконтроллер 21 ADAS. Вторая линия 32 связи LAN соединяет контроллер 1 ADAS и контроллер 22 FrCAMERA. Третья линия 33 связи LAN и четвертая линия 34 связи LAN соединяют контроллер 7 StBW1 и контроллер 26 StBW2. Пятая линия 35 связи LAN соединяет контроллер 6 eACT и контроллер 24 VDC.
[0037] [Конфигурация отказоустойчивой системы управления]
Фиг.2 иллюстрирует конфигурацию отказоустойчивой системы управления, состоящей из контроллера 1 ADAS, включенного в первую группу A контроллеров, и субконтроллера 21 ADAS, включенного во вторую группу B контроллеров, из множества контроллеров. Конфигурация отказоустойчивой системы управления будет описана ниже со ссылкой на фиг. 2.
[0038] Как показано на фиг. 2, контроллер 1 ADAS включает в себя блок 1а определения отказа, блок 1b передачи информации об отказе и блок 1с отказоустойчивого управления. Точно так же, как показано на фиг. 2, субконтроллер 21 ADAS включает в себя блок 21a определения отказа, блок 21b передачи информации об отказе и блок 21c отказоустойчивого управления.
[0039] Блок 1а определения отказа определяет, произошел ли отказ в любом из множества контроллеров 1, 2, 3, 4, 5, 6, 7, включенных в первую группу А контроллеров, при выборе режима автономного вождения. Аналогичным образом, блок 21a определения отказа определяет, произошел ли отказ в любом из множества контроллеров 21, 22, 23, 24, 25, 26, включенных во вторую группу B контроллеров, при выборе режима автономного вождения.
[0040] Здесь, в случае первой группы A контроллеров, каждый из множества контроллеров 1, 2, 3, 4, 5, 6, 7 имеет функцию самодиагностики, и если отказ произошел в соответствии с самодиагностиком, выдает флаг отказа в блок 1а определения отказа. Здесь, если не введен флаг отказа, блок 1а определения отказа определяет, что все контроллеры 1, 2, 3, 4, 5, 6, 7 исправны. С другой стороны, если вводится флаг отказа, определяется, что отказ произошел в контроллере, указанном флагом. То же самое относится к блоку 21а определения отказа; флаг отказа вводится от множества контроллеров 21, 22, 23, 24, 25, 26, включенных во вторую группу В контроллеров.
[0041] После определения того, что отказ произошел в любом из множества контроллеров 1, 2, 3, 4, 5, 6, 7, блок 1b передачи информации об отказе передает информацию об отказе из контроллера 1 ADAS в блок 21c отказоустойчивого управления субконтроллера 21 ADAS через четвертую линию 11 связи CAN. Аналогичным образом, после определения того, что отказ произошел в любом из множества контроллеров 21, 22, 23, 24, 25, 26, блок 21b передачи информации об отказе передает информацию об отказе из субконтроллера 21 ADAS в блок 1c отказоустойчивого управления контроллера ADAS 1 по четвертой линии 11 связи CAN.
[0042] Здесь, после определения блоком 1b передачи информации об отказе или блоком 21b передачи информации об отказе, что произошел отказ, в дополнение к передаче информации об отказе выводится информация уведомления, которая уведомляет и информирует водителя визуально (отображается на дисплей) или звуком (звуковой сигнал), что произошел отказ.
[0043] Если отказ происходит в контроллере, включенном во вторую группу B контроллеров, блок 1c отказоустойчивого управления принимает информацию об отказе из блока 21b передачи информации об отказе субконтроллера 21 ADAS через четвертую линию 11 связи CAN. Когда принята информация об отказе, контроллеры, составляющие первую группу A контроллеров, выполняют режим отказа для дублирования рабочей функции второй группы B контроллеров (отказавшая группа контроллеров) до тех пор, пока водитель не вернется к управлению. Точно так же, когда отказ происходит в контроллере, который является составной частью первой группы А контроллеров, блок 21c отказоустойчивого управления принимает информацию об отказе из блока 1b передачи информации об отказе контроллера 1 ADAS через четвертую линию 11 связи CAN. Когда принята информация об отказе, контроллеры, составляющие вторую группу B контроллеров, выполняют режим отказа для дублирования рабочей функции первой группы A контроллеров (отказавшей группы контроллеров) до тех пор, пока водитель не вернется к управлению.
[0044] После определения того, что отказ не произошел ни в одном из множества бортовых контроллеров 1-7, 21-26, выполняется нормальный режим, в котором рабочие функции реализуются с использованием всего множества контроллеров 1-7. , 21-26.
[0045] Примеры отказоустойчивого управления, выполняемого блоком 1с отказоустойчивого управления или блоком 21с отказоустойчивого управления, будут перечислены ниже.
[0046] (a) В случае, если рабочая функция представляет собой рабочую функцию исполнительного механизма рулевого управления, которая теряется из-за отказа контроллера 7 StBW1 (первый контроллер рулевого управления) и контроллера 26 StBW2 (второй контроллер рулевого управления), используется контроллер, включенный в нормальную группу контроллеров. Затем выполняются режимы 1, 2 отказа для дублирования рабочей функции исполнительного механизма рулевого управления, утраченной из-за отказа.
[0047] (b) В случае, если рабочая функция является рабочей функцией тормозного исполнительного механизма, которая теряется из-за отказа контроллера 6 eACT (первого контроллера тормоза), контроллера 24 VDC и контроллера 25 E-PKB (второй контроллер тормоза), используется контроллер, включенный в нормальную группу контроллеров. Затем выполняются режимы 1, 2 отказа для дублирования рабочей функции тормозного исполнительного механизма, утраченной из-за отказа.
[0048] (c) В случае, если рабочая функция является рабочей функцией распознавания полосы движения для рассматриваемого транспортного средства, которая потеряна из-за отказа контроллера 4 HDmap (первый контроллер распознавания полосы движения) и контроллера 22 FrCAMERA (второй контроллер распознавания полосы движения), используется контроллер, включенный в нормальную группу контроллеров. Затем выполняются режимы 1, 2 отказа для дублирования функции распознавания полосы движения рассматриваемого транспортного средства, утраченной из-за отказа.
[0049] (d) В случае, если рабочая функция представляет собой рабочую функцию распознавания препятствий впереди рассматриваемого транспортного средства, которая потеряна из-за отказа контроллера 3 RADAR (первый контроллер распознавания препятствий впереди) и контроллера 22 FrCAMERA (второй контроллер распознавания препятствий впереди), используется контроллер, включенный в нормальную группу контроллеров. Затем выполняются режимы 1, 2 отказа для дублирования рабочей функции распознавания препятствий впереди рассматриваемого транспортного средства, утраченной из-за отказа.
[0050] (e) В случае, если рабочая функция является рабочей функцией распознавания боковых препятствий рассматриваемого транспортного средства, которая потеряна из-за отказа контроллера 5 SR (первый контроллер распознавания боковых препятствий) и контроллера 23 SONAR (второй контроллер распознавания боковых препятствий), используется контроллер, включенный в нормальную группу контроллеров. Затем выполняются режимы 1, 2 отказа для дублирования рабочей функции распознавания боковых препятствий рассматриваемого транспортного средства, утраченной из-за отказа.
[0051] Операции первого варианта осуществления будут описаны отдельно как «операция отказоустойчивого управления при отказе бортового контроллера», «работа в нормальном режиме/режиме отказа в системе рулевого управления» и «работа в нормальном режиме/режиме отказа в системе управления тормозом». Кроме того, «работа в нормальном режиме/режиме отказа в системе управления распознаванием полосы движения», «работа в нормальном режиме/режиме отказа в системе управления распознаванием препятствий впереди»; и «работа в нормальном режиме/режиме отказа в системе управления распознаванием боковых препятствий» будут описано отдельно.
[0052] [Операция отказоустойчивого управления при отказе бортового контроллера]
В качестве сравнительного примера будет использовано транспортное средство с содействием при вождении, оснащенное множеством контроллеров, совместно использующих рабочие функции управления системой содействия при вождении, сконфигурированное избыточно для выполнения в случае отказа той же операции контроллера, которая выполнялась до отказа. Здесь «сконфигурированное избыточно» относится к конфигурации, в которой подготавливается множество систем управления, так что рабочие функции могут продолжаться даже в случае отказа части системы управления.
[0053] В случае сравнительного примера, хотя резервная функция, эквивалентная функции нормального состояния, обеспечивается во время отказа, количество датчиков, контроллеров и исполнительных механизмов становится большим из-за избыточной конфигурации. В частности, если количество бортовых контроллеров становится большим, как в случае с транспортными средствами с автономным вождением, в которых необходимо реализовать более многочисленные рабочие функции по мере увеличения уровня автономного вождения, принятие избыточной конфигурации приводит к огромному количеству датчиков, контроллеров и исполнительных механизмов.
[0054] С другой стороны, в случае транспортного средства с содействием при вождении, которое помогает водителю в вождении, например, по меньшей мере часть операции акселератора, операции торможения и операции рулевого управления возлагаются на бортовой контроллер во время движения. По этой причине отказоустойчивое управление является обязательным во время отказа, поэтому существует потребность в постоянном обеспечении резервной функции при подготовке к возникновению отказа.
[0055] Авторы настоящего изобретения сосредоточили внимание на вышеупомянутых проблемах и требованиях и обозначили обеспечение резервной функции в случае отказа без принятия избыточной конфигурации как проблему, которую необходимо решить. Затем в качестве средства для решения этой проблемы было использовано следующее: на основе архитектуры, которая реализует эквивалентные рабочие функции с каждой группой контроллеров, множество контроллеров разделяется на множество групп контроллеров для построения топологии сети. Затем, если отказ происходит в любом из множества контроллеров, контроллеры, которые составляют нормальную группу контроллеров, к которой отказавший контроллер не принадлежит, дублируют рабочую функцию отказавшей группы контроллеров, к которой принадлежит отказавший контроллер.
[0056] То есть, если отказ происходит в бортовом контроллере, желательно сохранить эквивалентную рабочую функцию в некоторой форме, даже если производительность немного снизится. Например, предполагается, что электрический усилитель, который выполняет управление усилением, и исполнительный механизм давления тормозной жидкости, который выполняет управление VDC, предусмотрены в качестве тормозных исполнительных механизмов для рабочей функции торможения «остановки». Среди таких транспортных средств есть такие, в которых, например, если электрический усилитель выходит из строя, «остановка» осуществляется с помощью исполнительного механизма давления тормозной жидкости, который выполняет управление VDC, даже если это исполнительный механизм, в котором точность торможения низкая по сравнению с электрическим усилителем.
[0057] Операция отказоустойчивого управления, когда выбран режим автономного вождения, будет описана ниже на основе Фиг.3.
[0058] Определяется, выбран ли режим автономного вождения (S1). После определения того, что режим автономного вождения не выбран, определение S1 повторяется.
[0059] После определения того, что режим автономного вождения выбран на этапе S1, определяется, произошел ли отказ в каком-либо из бортовых контроллеров (S2). После определения того, что отказ не произошел ни в одном из контроллеров, выполняется нормальный режим (S3), и последовательность операций от S1 -> S2 -> S3 повторяется. В нормальном режиме все бортовые контроллеры, которые совместно используют рабочие функции исполнительных механизмов и рабочие функции распознавания периферии рассматриваемого транспортного средства, используются для того, чтобы предписывать транспортному средству двигаться по одной полосе в режиме автономного вождения, в то же время поддерживая содействие в управлении рулевым колесом, регулировку ускорения/замедления скорости автомобиля и остановку/парковку.
[0060] С другой стороны, после определения того, что отказ произошел в любом из бортовых контроллеров на этапе S2, указываются (S4) отказавшая группа контроллеров, к которой принадлежит отказавший контроллер, и нормальная группа контроллеров, к которой отказавший контроллер не принадлежит. Затем информация об отказе (включая информацию об отказавшей рабочей функции) передается от отказавшей группы контроллеров к нормальной группе контроллеров через четвертую линию 11 связи CAN (S5). В то же время выводится информация уведомления, которая уведомляет водителя о том, что произошел отказ (S6).
[0061] Когда нормальная группа контроллеров принимает информацию об отказе через четвертую линию 11 связи CAN, контроллер, включенный в нормальную группу контроллеров, используется для выполнения режима 1 отказа или режима 2 отказа для дублирования рабочей функции, утраченной из-за отказа (S7).
[0062] После этапа S7 определяется, вернулся ли водитель к управлению (S8). Затем, пока определяется, что водитель не вернулся к управлению, поток процесса, который продвигается с S6 -> S7 -> S8, повторяется, и вывод информации уведомления, которая уведомляет водителя, что произошел отказ, и выполнение режима 1 отказа или режима 2 отказа продолжается. После этого, когда определяется, что водитель вернулся к управлению, процесс переходит с этапа S8 на этап S9, режим автономного вождения переключается на режим ручного вождения на этапе S9, а операция отказоустойчивого управления, когда выбран режим автономного вождения, заканчивается.
Здесь возвращение водителя к управлению определяется, например, путем обнаружения того, что водитель приложил усилие рулевого управления к рулевому колесу с помощью датчика крутящего момента, предусмотренного в системе рулевого управления.
[0063] Таким образом, когда определяется, что отказ произошел в любом из бортовых контроллеров, выполняется режим 1 отказа или режим 2 отказа для дублирования рабочей функции, утерянной из-за отказа, пока водитель не вернется к управлению. В результате, когда отказ происходит в любом из множества контроллеров, установленных в транспортном средстве, можно реализовать рабочую функцию, которая эквивалентна рабочей функции, которая была потеряна из-за отказа, без выполнения конфигурации системы управления избыточной.
[0064] [Работа в нормальном режиме/режиме отказа в системе рулевого управления]
Работа в нормальном режиме/режиме отказа в системе рулевого управления будет описана ниже на основе фиг. 4-6.
[0065] Как показано на Фиг.4, первая группа А контроллеров в качестве системы рулевого управления имеет контроллер 1 ADAS и контроллер 7 StBW1 (первый контроллер рулевого управления), который управляет первым мотором 51 рулевого управления (первый исполнительный механизм рулевого управления). Как показано на фиг. 4, вторая группа B контроллеров имеет в качестве системы рулевого управления субконтроллер 21 ADAS и контроллер 26 StBW2 (второй контроллер рулевого управления), который управляет вторым мотором 52 рулевого управления (второй исполнительный механизм рулевого управления).
[0066] Как показано на Фиг.4, в нормальном режиме системы рулевого управления все из контроллера 1 ADAS, контроллера 7 StBW1, субконтроллера 21 ADAS и контроллера 26 StBW2 используются для совместного использования рабочей функции исполнительного механизма рулевого управления.
[0067] Предполагается, что произошел отказ в системе рулевого управления, предоставленной во второй группе В контроллеров. Здесь «отказ в системе рулевого управления, предоставленной во второй группе В контроллеров», включает в себя не только отказы субконтроллера 21 ADAS и контроллера 26 StBW2 как таковых, но также и отказы соединителей, отказы связи, отказы исполнительных механизмов и т.п. То есть он включает в себя все причины, которые могут привести к нарушению рабочей функции исполнительного механизма рулевого управления во второй группе В контроллеров.
[0068] В этом случае, как показано на фиг. 5, выполняется режим 1 отказа, в котором контроллер 1 ADAS и контроллер 7 StBW1, включенные в первую группу А контроллеров, которая является нормальной группой контроллеров, используются для дублирования рабочей функции исполнительного механизма рулевого управления, утраченной из-за отказа.
[0069] Предполагается, что произошел отказ в системе рулевого управления, предоставленной в первой группе А контроллеров. Здесь «отказ в системе рулевого управления, предоставленной в первой группе А контроллеров», включает в себя не только отказы контроллера 1 ADAS и контроллера 7 StBW1 как таковых, но также и отказы соединителей, отказы связи, отказы исполнительных механизмов и т.п. То есть он включает в себя все причины, которые могут привести к нарушению рабочей функции исполнительного механизма рулевого управления в первой группе А контроллеров.
[0070] В этом случае, как показано на Фиг.6, выполняется режим 2 отказа, в котором субконтроллер 21 ADAS и контроллер 26 StBW2, включенные во вторую группу B контроллеров, которая является нормальной группой контроллеров, используются для дублирования рабочей функции исполнительного механизма рулевого управления, утраченной из-за отказа.
[0071] [Работа в нормальном режиме/режиме отказа в системе управления тормозом]
Работа в нормальном режиме/режиме отказа в системе управления тормозом будет описана ниже на основе фиг. 7-9.
[0072] Как показано на фиг. 7, первая группа А контроллеров в качестве системы управления тормозом имеет контроллер 1 ADAS и контроллер 6 eACT, который управляет электрическим усилителем 53. Как показано на фиг. 7, вторая группа В контроллеров в качестве системы управления тормозом имеет субконтроллер 21 ADAS, контроллер 24 VDC, который управляет исполнительным механизмом 54 давления тормозной жидкости, и контроллер 25 E-PKB, который управляет исполнительным механизмом 55 PKB. Электрический усилитель 53 соответствует первому тормозному исполнительному механизму, а контроллер 6 eACT соответствует первому контроллеру тормоза. Исполнительный механизм 54 давления тормозной жидкости и исполнительный механизм 55 PKB соответствуют второму тормозному исполнительному механизму, а контроллер 24 VDC и контроллер 25 E-PKB соответствуют второму контроллеру тормоза.
[0073] Как показано на Фиг.7, в нормальном режиме системы управления тормозом контроллер 1 ADAS, контроллер 6 eACT, субконтроллер 21 ADAS, контроллер 24 VDC и контроллер 25 E-PKB - все используется для совместного использования рабочей функции тормозного исполнительного механизма.
[0074] Предполагается, что произошел отказ в системе управления тормозом, предоставленной во второй группе В контроллеров. Здесь «отказ в системе управления тормозом, предоставленной во второй группе В контроллеров», включает в себя не только отказы субконтроллера 21 ADAS, контроллера 24 VDC и контроллера 25 E-PKB как таковых, но также и отказы соединителей, отказы связи, отказы исполнительных механизмов и т.п. То есть он включает в себя все причины, которые могут привести к нарушению рабочей функции тормозного исполнительного механизма во второй группе В контроллеров.
[0075] В этом случае, как показано на фиг. 8, выполняется режим 1 отказа, в котором контроллер 1 ADAS и контроллер 6 eACT, включенные в первую группу А контроллеров, которая является нормальной группой контроллеров, используются для дублирования рабочей функции исполнительного механизма рулевого управления, утраченной из-за отказа.
[0076] Предполагается, что произошел отказ в системе управления тормозом, предоставленной в первой группе А контроллеров. Здесь «отказ в системе управления тормозом, предоставленной в первой группе А контроллеров», включает не только отказы контроллера 1 ADAS и контроллера 6 eACT как таковых, но также отказы соединителей, отказы связи, отказы исполнительных механизмов и т.п. То есть он включает в себя все причины, которые могут привести к нарушению рабочей функции тормозного исполнительного механизма в первой группе А контроллеров.
[0077] В этом случае, как показано на Фиг.9, выполняется режим 2 отказа, в котором субконтроллер 21 ADAS, контроллер 24 VDC и контроллер 25 E-PKB, включенные во вторую группу B контроллеров, которая является нормальной группой контроллеров, используются для дублирования рабочей функции тормозного исполнительного механизма, утерянной из-за отказа.
[0078] [Работа в нормальном режиме/режиме отказа в системе управления распознаванием полосы движения]
Работа в нормальном режиме/режиме отказа в системе управления распознаванием полосы движения будет описана ниже на основе фиг. 10-12.
[0079] Как показано на Фиг.10, первая группа А контроллеров в качестве системы управления распознаванием полосы движения имеет контроллер 1 ADAS и контроллер 4 HDmap, который распознает полосу движения рассматриваемого транспортного средства на основе положения рассматриваемого транспортного средства и высокоточной карты. Как показано на фиг.10, вторая группа В контроллеров в качестве системы управления распознаванием полосы движения имеет субконтроллер 21 ADAS и контроллер 22 FrCAMERA, который распознает полосу движения рассматриваемого транспортного средства на основе информации изображения впереди рассматриваемого транспортного средства от передней камеры. Контроллер 4 HDmap соответствует первому контроллеру распознавания полосы движения, а контроллер 22 FrCAMERA соответствует второму контроллеру распознавания полосы движения.
[0080] Как показано на Фиг. 10, в нормальном режиме системы управления распознаванием полосы движения все из контроллера 1 ADAS, контроллера 4 HDmap, субконтроллера 21 ADAS и контроллера 22 FrCAMERA используются для совместного использования рабочей функции распознавания полосы движения.
[0081] Предполагается, что отказ произошел в системе управления распознаванием полосы движения, предоставленной во второй группе В контроллеров. Здесь «отказ в системе управления распознаванием полосы движения во второй группе B контроллеров» включает в себя не только отказы субконтроллера 21 ADAS и контроллера 22 FrCAMERA как таковых, но также и отказы соединителей, отказы связи, отказы исполнительных механизмов и т.п. То есть он включает в себя все причины, которые могут привести к отказу рабочей функции распознавания полосы движения во второй группе В контроллеров.
[0082] В этом случае, как показано на Фиг. 11, выполняется режим 1 отказа, в котором контроллер 1 ADAS и контроллер 4 HDmap, включенные в первую группу А контроллеров, которая является нормальной группой контроллеров, используются для дублирования рабочей функция распознавания полосы движения, утерянной из-за отказа.
[0083] Предполагается, что отказ произошел в системе управления распознаванием полосы движения, предоставленной в первой группе А контроллеров. Здесь «отказ в системе управления распознаванием полосы движения в первой группе А контроллеров» включает в себя не только отказы контроллера ADAS 1 и контроллера HDmap 4 как таковых, но также и отказы соединителей, отказы связи, отказы исполнительных механизмов и т.п. То есть он включает в себя все причины, которые могут привести к отказу рабочей функции распознавания полосы движения в первой группе А контроллеров.
[0084] В этом случае, как показано на Фиг.12, выполняется режим 2 отказа, в котором субконтроллер 21 ADAS и контроллер 22 FrCAMERA, включенные во вторую группу B контроллеров, которая является нормальной группой контроллеров, используются для дублирования рабочей функции распознавания полосы движения, утерянной из-за отказа.
[0085] [Работа в нормальном режиме/режиме отказа в системе управления распознаванием препятствий впереди]
Работа в нормальном режиме/режиме отказа в системе управления распознаванием препятствий впереди будет описана ниже на основе фиг. 13-15.
[0086] Как показано на фиг. 13, первая группа А контроллеров в качестве системы управления распознаванием препятствий впереди имеет контроллер 1 ADAS и контроллер 3 RADAR, который распознает препятствия впереди рассматриваемого транспортного средства на основе радиолокационной информации от переднего радара. Как показано на фиг. 13, вторая группа В контроллеров в качестве системы управления распознаванием препятствий впереди имеет субконтроллер 21 ADAS и контроллер 22 FrCAMERA, который распознает препятствия впереди рассматриваемого транспортного средства на основе данных изображения впереди рассматриваемого транспортного средства от передней камеры. Контроллер 3 RADAR соответствует первому контроллеру распознавания препятствий впереди, а контроллер 22 FrCAMERA соответствует второму контроллеру распознавания препятствий впереди.
[0087] Как показано на Фиг. 13, в нормальном режиме системы управления распознаванием препятствий впереди все из контроллера 1 ADAS, контроллера 3 RADAR, субконтроллера 21 ADAS и контроллера 22 FrCAMERA используются для совместного использования рабочей функции распознавания препятствий впереди.
[0088] Предполагается, что произошел отказ в системе управления распознаванием препятствий впереди, предоставленной во второй группе В контроллеров. Здесь «отказ в системе управления распознаванием препятствий впереди во второй группе B контроллеров» включает в себя не только отказы субконтроллера 21 ADAS и контроллера 22 FrCAMERA как таковых, но также и отказы соединителей, отказы связи, отказы исполнительных механизмов и т.п. То есть он включает в себя все причины, которые могут привести к отказу рабочей функции распознавания препятствий впереди во второй группе В контроллеров.
[0089] В этом случае, как показано на фиг. 14, выполняется режим 1 отказа, в котором контроллер 1 ADAS и контроллер 3 RADAR, включенные в первую группу А контроллеров, которая является нормальной группой контроллеров, используются для дублирования рабочей функции распознавания препятствий впереди, утерянной из-за отказа.
[0090] Предполагается, что произошел отказ в системе управления распознаванием препятствий впереди, предоставленной в первой группе А контроллеров. Здесь «отказ в системе управления распознаванием препятствий впереди в первой группе A контроллеров» включает в себя не только отказы контроллера ADAS 1 и контроллера RADAR 3 как таковых, но также и отказы соединителей, отказы связи, отказы исполнительных механизмов и т.п. То есть он включает в себя все причины, которые могут привести к отказу рабочей функции распознавания препятствий впереди в первой группе А контроллеров.
[0091] В этом случае, как показано на фиг. 15, выполняется режим 2 отказа, в котором субконтроллер 21 ADAS и контроллер 22 FrCAMERA, включенные во вторую группу B контроллеров, которая является нормальной группой контроллеров, используются для дублирования рабочей функции распознавания препятствий впереди, утерянной из-за отказа.
[0092] [Работа в нормальном режиме/режиме отказа в системе управления распознаванием боковых препятствий]
Работа в нормальном режиме/режиме отказа в системе управления распознаванием боковых препятствий будет описана ниже на основе фиг. 16-18.
[0093] Как показано на фиг. 16, первая группа А контроллеров в качестве системы управления распознаванием боковых препятствий имеет контроллер 1 ADAS и контроллер 5 SR, который распознает препятствия по бокам рассматриваемого транспортного средства на основе радиолокационной информации из боковых радаров. Как показано на фиг. 16, вторая группа В контроллеров в качестве системы управления распознаванием боковых препятствий имеет субконтроллер 21 ADAS и контроллер 23 SONAR, который распознает препятствия по бокам от рассматриваемого транспортного средства на основе информации сонара от сонаров. Контроллер 5 SR соответствует первому контроллеру распознавания боковых препятствий, а контроллер 23 SONAR соответствует второму контроллеру распознавания боковых препятствий.
[0094] Как показано на фиг. 16, в нормальном режиме системы управления распознаванием боковых препятствий все из контроллера 1 ADAS, контроллера 5 SR, субконтроллера 21 ADAS и контроллера 23 SONAR используются для совместного использования рабочей функции распознавания боковых препятствий.
[0095] Предполагается, что произошел отказ в системе управления распознаванием боковых препятствий, предоставленной во второй группе В контроллеров. Здесь «отказ в системе управления распознаванием боковых препятствий во второй группе B контроллеров» включает в себя не только отказы субконтроллера 21 ADAS и контроллера 23 SONAR как таковых, но также и отказы соединителей, отказы связи, отказы исполнительных механизмов и т.п. То есть он включает в себя все причины, которые могут привести к отказу рабочей функции распознавания боковых препятствий во второй группе В контроллеров.
[0096] В этом случае, как показано на фиг. 17, выполняется режим 1 отказа, в котором контроллер 1 ADAS и контроллер 5 SR, включенные в первую группу А контроллеров, которая является нормальной группой контроллеров, используются для дублирования рабочей функции распознавания боковых препятствий, утерянной из-за отказа.
[0097] Предполагается, что отказ произошел в системе управления распознаванием боковых препятствий, предоставленной в первой группе А контроллеров. Здесь «отказ в системе управления распознаванием боковых препятствий в первой группе A контроллеров» включает в себя не только отказы контроллера 1 ADAS и контроллера 5 SR как таковых, но также и отказы соединителей, отказы связи, отказы исполнительных механизмов и т.п. То есть он включает в себя все причины, которые могут привести к отказу рабочей функции распознавания боковых препятствий в первой группе А контроллеров.
[0098] В этом случае, как показано на фиг. 18, выполняется режим 2 отказа, в котором субконтроллер 21 ADAS и контроллер 23 SONAR, включенные во вторую группу B контроллеров, которая является нормальной группой контроллеров, используются для дублирования рабочей функции распознавания боковых препятствий, утерянной из-за отказа.
[0099] Как описано выше, следующие эффекты проявляются со способом управления и системой управления для транспортного средства с автономным вождением согласно первому варианту осуществления.
[0100] (1) Способ управления транспортным средством с содействием при вождении, снабженным множеством контроллеров 1-7, 21-26, которые совместно используют рабочие функции в управлении содействием при вождении, содержащий:
разделение множества контроллеров 1-7, 21-26 на множество групп контроллеров (первая группа А контроллеров, вторая группа В контроллеров) для построения топологии сети на основе архитектуры, которая реализует эквивалентные рабочие функции с каждой группой контроллеров,
определение того, произошел ли отказ в любом из множества контроллеров 1-7, 21-26, отправку информации об отказе в нормальную группу контроллеров, отличную от отказавшей группы контроллеров, к которой принадлежит отказавший контроллер, через сетевую линию связи после определения того, что отказ произошел в любом из множества контроллеров 1-7, 21-26, и выполнение режима отказа для дублирования рабочей функции отказавшей группы контроллеров посредством контроллеров, составляющих нормальную группу контроллеров, когда нормальная группа контроллеров принимает информацию об отказе по сетевой линии связи (фиг. 1). В результате можно предоставить способ управления, который реализует рабочую функцию, которая эквивалентна рабочей функции, которая теряется из-за отказа, когда отказ происходит в любом из множества встроенных контроллеров 1-7, 21-26, не делая конфигурацию системы управления избыточной. То есть на основе архитектуры, которая реализует эквивалентные рабочие функции с каждой группой контроллеров, например, множество контроллеров 1-7, 21-26 делятся на первую группу А контроллеров и вторую группу В контроллеров. По этой причине, разделенные первая группа А контроллеров и вторая группа В контроллеров имеют взаимосвязь, в которой одна группа контроллеров дублирует рабочие функции другой группы при подготовке к отказу.
[0101] (2) После определения того, что отказ не произошел ни в одном из множества контроллеров 1-7, 21-26, выполняется нормальный режим, в котором рабочие функции реализуются с использованием всего множества контроллеров (Фиг. 1). По этой причине можно использовать простую конфигурацию системы управления, которая не включает элементы системы управления, которые не используются при реализации рабочих функций, которые требуются при управлении в нормальном режиме. То есть, если конфигурация системы управления имеет избыточную конфигурацию, она будет включать элементы системы управления, которые не используются при реализации рабочих функций, которые требуются при управлении в нормальном режиме. То есть выполнение нормального режима с использованием всего множества контроллеров подтверждает тот факт, что он не имеет избыточной конфигурации, в которой подготавливается множество элементов системы управления, которые реализуют одни и те же рабочие функции.
[0102] (3) Множество контроллеров 1-7, 21-26 разделено на первую группу А контроллеров и вторую группу В контроллеров для построения топологии сети и сетевые линии связи/источники питания первой группы А контроллеров и второй группы В контроллеров электрически и физически независимы (фиг. 1). Следовательно, когда режим отказа выполняется с использованием контроллеров, включенных в нормальную группу контроллеров, режим отказа, который дублирует рабочую функцию, потерянную из-за отказа, может быть выполнен без влияния группы контроллеров, к которой принадлежит отказавший контроллер. Таким образом, обеспечивается электрическая и физическая независимость сетевых линий связи/источников питания первой группы A контроллеров и второй группы B контроллеров.
[0103] (4) Транспортное средство с содействием при вождении - это транспортное средство с автономным вождением, которое реализует по меньшей мере автономное вождение по одной полосе движения, когда выбран режим автономного вождения, множество контроллеров 1-7, 21-26 являются контроллерами, которые совместно используют рабочую функцию исполнительного механизма и рабочую функцию распознавания периферии рассматриваемого транспортного средства в управлении автономным вождением, когда выбран режим автономного вождения, определяется, произошел ли отказ в любом из множества контроллеров 1-7, 21-26, после определения того, что произошел отказ, информация об отказе отправляется в нормальную группу контроллеров, к которой отказавший контроллер не принадлежит, через сетевую линию связи, и выводится информация уведомления, которая уведомляет водителя о том, что произошел отказ, и когда нормальная группа контроллеров принимает информацию об отказе через сетевую линию связи, контроллеры, составляющие нормальную группу контроллеров, выполняют режим отказа для дублирования рабочей функции отказавшей группы контроллеров, пока водитель не вернется к управлению (фиг. 3). По этой причине, когда происходит отказ в одном контроллере, отвечающем за требуемую рабочую функцию, когда выбран режим автономного вождения, можно реализовать рабочую функцию, которая эквивалентна рабочей функции, которая потеряна из-за отказа, с момента, когда отказ происходит, до момента, пока водитель не вернется к управлению. То есть, в случае транспортного средства с автономным вождением, окончательной отказоустойчивой операцией является ручное управление водителем. Следовательно, в режиме отказа, когда выбран режим автономного вождения, достаточно, если может быть реализована рабочая функция, которая эквивалентна рабочей функции, которая потеряна из-за отказа, с момента возникновения отказа до передачи управления на ручное управление водителем.
[0104] (5) Система рулевого управления транспортного средства с автономным вождением снабжена первым контроллером рулевого управления (контроллер 7 StBW1), который включен в первую группу А контроллеров и который управляет первым исполнительным механизмом рулевого управления (первый мотор 51 рулевого управления), и вторым контроллером рулевого управления (контроллер 26 StBW2), который включен во вторую группу В контроллеров и который управляет вторым исполнительным механизмом рулевого управления (второй мотор 52 рулевого управления), при этом, если рабочая функция, которая потеряна из-за отказа, является рабочей функцией исполнительного механизма рулевого управления, первого контроллера рулевого управления (контроллер 7 StBW1) и второго контроллера рулевого управления (контроллер 26 StBW2), контроллер, включенный в нормальную группу контроллеров, используется для выполнения режима отказа для дублирования потерянной рабочей функции (фиг. 4-6). По этой причине, если есть отказ в одном контроллере, отвечающем за рабочую функцию исполнительного механизма рулевого управления, можно использовать контроллер, включенный в нормальную группу контроллеров из двух групп А, B контроллеров, чтобы тем самым реализовать эквивалентную рабочую функцию в качестве потерянной рабочей функции исполнительного механизма рулевого управления.
[0105] (6) Система управления тормозом транспортного средства с автономным вождением снабжена первым контроллером тормоза (контроллер 6 eACT), который включен в первую группу А контроллеров и который управляет первым тормозным исполнительным механизмом (электрический усилитель 53), и
вторым контроллером тормоза (контроллер 24 VDC, контроллер 25 E-PKB), который включен во вторую группу В контроллеров и который управляет вторым тормозным исполнительным механизмом (исполнительный механизм 54 давления тормозной жидкости, исполнительный механизм 55 PKB), при этом, если рабочая функция, которая теряется из-за отказа, является рабочей функцией тормозного исполнительного механизма, первого контроллера тормоза (контроллер 6 eACT) и второго контроллера тормоза (контроллер 24 VDC, контроллер 25 E-PKB), контроллер, включенный в нормальную группу контроллеров, используется для выполнения режима отказа для дублирования утерянной рабочей функции (фиг. 7-9). По этой причине, если есть отказ в одном контроллере, отвечающем за рабочую функцию тормозного исполнительного механизма, можно использовать контроллер, включенный в нормальную группу контроллеров из двух групп А, B контроллеров, чтобы тем самым реализовать эквивалентную рабочую функцию в качестве рабочей функции тормозного исполнительного механизма.
[0106] (7) Система распознавания периферии рассматриваемого транспортного средства для транспортного средства с автономным вождением снабжена первым контроллером распознавания полосы движения (контроллер 4 HDmap), который включен в первую группу А контроллеров и который распознает полосу движения рассматриваемого транспортного средства на основе положения рассматриваемого транспортного средства и высокоточной карты, и вторым контроллером распознавания полосы движения (контроллер 22 FrCAMERA), который включен во вторую группу В контроллеров и который распознает полосу движения рассматриваемого транспортного средства на основе информации изображения впереди рассматриваемого транспортного средства с передней камеры, при этом, если рабочая функция, которая потеряна из-за отказа, является рабочей функцией распознавания полосы движения рассматриваемого транспортного средства, первого контроллера распознавания полосы движения (контроллер 4 HDmap) и второго контроллера распознавания полосы движения (контроллер 22 FrCAMERA), контроллер, включенный в нормальную группу контроллеров, используется для выполнения режима отказа для дублирования потерянной рабочей функции (Фиг. 10-12). По этой причине, если есть отказ в одном контроллере, отвечающем за рабочую функцию распознавания полосы движения, можно использовать контроллер, включенный в нормальную группу контроллеров из двух групп А, B контроллеров, чтобы тем самым реализовать эквивалентную рабочую функцию в качестве рабочей функции распознавания полосы движения.
[0107] (8) Система распознавания периферии рассматриваемого транспортного средства для транспортного средства с автономным вождением снабжена первым контроллером распознавания препятствий впереди (контроллер 3 RADAR), который включен в первую группу А контроллеров и который распознает препятствие впереди рассматриваемого транспортного средства на основе радиолокационной информации от переднего радара, и вторым контроллером распознавания препятствий впереди (контроллер 22 FrCAMERA), который включен во вторую группу В контроллеров и который распознает препятствие впереди рассматриваемого транспортного средства на основе данных изображения впереди рассматриваемого транспортного средства от передней камеры, при этом, если рабочая функция, которая теряется из-за отказа, является рабочей функцией распознавания препятствий впереди рассматриваемого транспортного средства, первого контроллера распознавания препятствий впереди (контроллер 3 RADAR) и второго контроллера распознавания препятствий впереди (контроллер 22 FrCAMERA), контроллер, включенный в нормальную группу контроллеров, используется для выполнения режима отказа для дублирования потерянной рабочей функция (фиг. 13-15). По этой причине, когда возникает отказ в одном контроллере, отвечающем за рабочую функцию распознавания препятствий впереди, можно использовать контроллер, включенный в нормальную группу контроллеров из двух групп А, B контроллеров, чтобы тем самым реализовать эквивалентную рабочую функцию в качестве рабочей функции распознавания препятствий впереди.
[0108] (9) Система распознавания периферии рассматриваемого транспортного средства для транспортного средства с автономным вождением снабжена первым контроллером распознавания боковых препятствий (контроллер 5 SR), который включен в первую группу А контроллеров и который распознает боковое препятствие рассматриваемого транспортного средства на основе радиолокационной информации от боковых радаров, и вторым контроллером распознавания боковых препятствий (контроллер 23 SONAR), который включен во вторую группу В контроллеров и который распознает боковые препятствия рассматриваемого транспортного средства на основе информации сонара от сонаров, и если рабочая функция, которая теряется из-за отказа, является рабочей функцией распознавания боковых препятствий рассматриваемого транспортного средства, первого контроллера распознавания боковых препятствий (контроллер 5 SR) и второго контроллера распознавания боковых препятствий (контроллер 23 SONAR), контроллер, включенный в нормальную группу контроллеров, используется для выполнения режима отказа для дублирования потерянной рабочей функции (фиг. 16-18). По этой причине, когда происходит отказ в одном контроллере, отвечающем за рабочую функцию распознавания боковых препятствий, можно использовать контроллер, включенный в нормальную группу контроллеров из двух групп А, B контроллеров, чтобы тем самым реализовать эквивалентную рабочую функцию в качестве рабочей функции распознавания боковых препятствий.
[0109] (10) Система управления для транспортного средства с содействием при вождении, снабженная множеством контроллеров 1-7, 21-26, которые совместно используют рабочие функции в управлении содействием при вождении, в которой
множество контроллеров 1-7, 21-26 разделено на множество групп контроллеров (первая группа А контроллеров, вторая группа В контроллеров) для построения топологии сети на основе архитектуры, которая реализует эквивалентные рабочие функции с каждой группой контроллеров, содержащая: блоки 1a, 21a определения отказа для определения того, произошел ли отказ в любом из множества контроллеров 1-7, 21-26, блоки 1b, 21b передачи информации об отказе для отправки информации об отказе в нормальную группу контроллеров, отличную от отказавшей группы контроллеров, к которой принадлежит отказавший контроллер, через сетевую линию связи, после определения того, что отказ произошел в любом из множества контроллеров 1-7, 21-26, и блоки 1c, 21c отказоустойчивого управления для выполнения режим отказа для дублирования рабочей функции отказавшей группы контроллеров посредством контроллеров, составляющих нормальную группу контроллеров, когда нормальная группа контроллеров принимает информацию об отказе через сетевую линию связи (фиг. 2). В результате можно предоставить систему управления, которая реализует рабочую функцию, которая эквивалентна рабочей функции, которая теряется из-за отказа, когда отказ происходит в любом из множества контроллеров 1-7, 21-26, установленных в транспортном средстве, не делая конфигурацию системы управления избыточной.
[0110] Способ управления и система управления для транспортного средства с содействием при вождении согласно настоящему раскрытию были описаны выше на основе первого варианта осуществления. Однако конкретные конфигурации не ограничиваются этим первым вариантом осуществления, и в конструкцию могут быть внесены различные модификации и дополнения, не выходящие за рамки объема изобретения согласно каждому пункту формулы изобретения.
[0111] В первом варианте осуществления был представлен пример, в котором на основе архитектуры, которая реализует эквивалентные рабочие функции с каждой группой контроллеров, множество бортовых контроллеров разделено на первую группу А контроллеров и вторую группу В контроллеров для построения топологии сети. Однако множество бортовых контроллеров может быть частично или полностью разделено на три или более группы контроллеров в соответствии с рабочими функциями и требованиями для построения топологии сети.
[0112] В первом варианте осуществления блок 1a определения отказа, блок 1b передачи информации об отказе и блок 1c отказоустойчивого управления предусмотрены в контроллере 1 ADAS в качестве конфигурации отказоустойчивой системы управления. Точно так же субконтроллер 21 ADAS включает в себя блок 21a определения отказа, блок 21b передачи информации об отказе и блок 21c отказоустойчивого управления. Однако конфигурация отказоустойчивой системы управления может заключаться в том, что отказоустойчивый контроллер предоставляется в первой группе контроллеров отдельно от контроллера ADAS, и отказоустойчивый контроллер может быть предоставлен во второй группе контроллеров отдельно от субконтроллера ADAS. Кроме того, в качестве конфигурации отказоустойчивой системы управления отказоустойчивый контроллер может быть предоставлен независимо от первой группы контроллеров и второй группы контроллеров.
[0113] В первом варианте осуществления был представлен пример, в котором контроллеры 1-7, 21-26, которые совместно используют рабочую функцию исполнительного механизма и рабочую функцию распознавания периферии рассматриваемого транспортного средства в управлении автономным вождением, установлены в транспортном средстве как множество контроллеров. Однако в дополнение к рабочей функции исполнительного механизма и рабочей функции распознавания периферии рассматриваемого транспортного средства в управлении с содействием при вождении, контроллеры, которые совместно используют рабочую функцию распознавания скорости транспортного средства, рабочую функцию отображения и т.п., также могут быть установлены в транспортном средстве в качестве множества контроллеров.
[0114] В первом варианте осуществления были представлены примеры, в которых рабочая функция исполнительного механизма рулевого управления и рабочая функция тормозного исполнительного механизма дублируются, и рабочие функции распознавания полосы движения/препятствий впереди/бокового препятствия дублируются в качестве отказоустойчивого управления. Однако при добавлении бортовых контроллеров рабочая функция распознавания скорости транспортного средства также может быть дублирована, или рабочая функция отображения также может быть дублирована в качестве отказоустойчивого управления.
[0115] В первом варианте осуществления был представлен пример, в котором способ управления и система управления настоящего раскрытия применяются к транспортному средству с автономным вождением, которое является транспортным средством с электрическим приводом (гибридным транспортным средством или электрическим транспортным средством), которое реализует автономное вождение по одной полосе на выделенной автомобильной дороге. Однако способ управления и система управления настоящего раскрытия, конечно, могут быть применены к транспортному средству с автономным вождением, имеющему более высокий уровень автономного вождения. Кроме того, они также могут применяться к транспортному средству с содействием при вождении, оборудованному системой аварийного торможения, системой ACC и т.п. Кроме того, они могут применяться не только к транспортным средствам с электрическим приводом, но также и к транспортным средствам с приводом от двигателя.
В транспортном средстве на основе архитектуры, которая реализует эквивалентные рабочие функции с каждой группой контроллеров, множество бортовых контроллеров (1-7, 21-26) делятся на первую группу (A) контроллеров и вторую группу (B) контроллеров для построения топологии сети. Определяется, произошел ли отказ в любом из множества контроллеров (1-7, 21-26). После определения того, что отказ произошел в любом из множества контроллеров (1-7, 21-26), информация об отказе отправляется в нормальную группу контроллеров, отличную от отказавшей группы контроллеров, к которой принадлежит отказавший контроллер, через сетевую линию связи. Когда нормальная группа контроллеров принимает информацию об отказе через сетевую линию связи, контроллеры, составляющие нормальную группу контроллеров, выполняют режим отказа для дублирования рабочей функции отказавшей группы контроллеров, до тех пор, пока водитель не берет управление транспортным средством на себя. Таким образом реализуется рабочая функция, которая эквивалентна рабочей функции, которая теряется из-за отказа, без обращения к сконфигурированной избыточно системе управления. 2 н. и 8 з.п. ф-лы, 18 ил.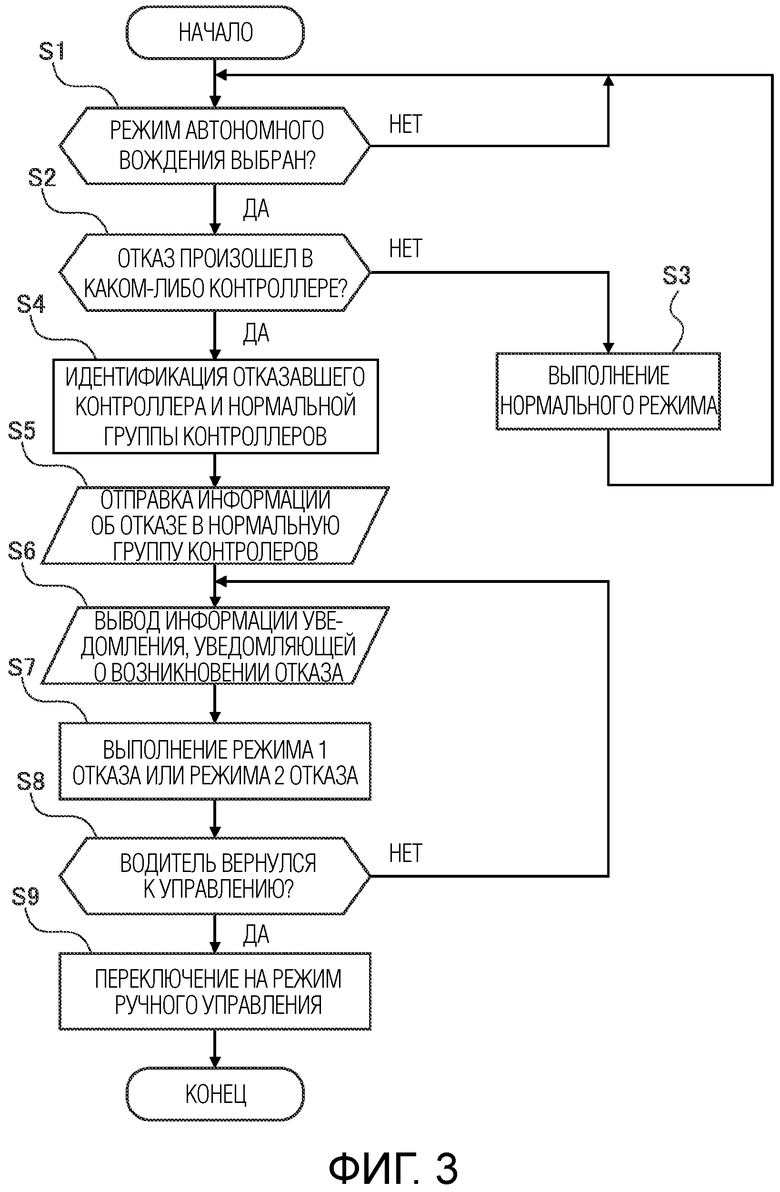
1. Способ управления транспортным средством с содействием при вождении, включающим в себя множество контроллеров (1-7, 21-26), которые совместно используют рабочие функции при управлении содействием при вождении, содержащий этапы, на которых:
разделяют множество контроллеров (1-7, 21-26), которые соответственно совместно используют рабочую функцию исполнительного механизма и рабочую функцию распознавания периферии рассматриваемого транспортного средства при управлении содействием при вождении, на множество групп (A, B) контроллеров для построения топологии сети,
определяют (S2), произошел ли отказ в любом из множества контроллеров (1-7, 21-26),
после определения (S2) того, что отказ произошел в любом из множества контроллеров (1-7, 21-26), отправляют (S5) информацию об отказе в нормальную группу контроллеров, отличную от отказавшей группы контроллеров, к которой принадлежит отказавший контроллер, через сетевую линию связи (8-12, 27-28, 32-35), и
когда нормальная группа контроллеров принимает информацию об отказе через сетевую линию связи (8-12, 27-28, 32-35), выполняют (S7) режим отказа для дублирования рабочей функции, которая потеряна из-за отказа, с использованием контроллеров, составляющих нормальную группу контроллеров,
отличающийся тем, что
топология сети основана на архитектуре, которая реализует эквивалентные рабочие функции с каждой из групп (A, B) контроллеров, и
выполнение (S7) режима отказа продолжают до тех пор, пока водитель не вернется к управлению.
2. Способ управления транспортным средством с содействием при вождении по п. 1, в котором
после определения того, что отказ не произошел ни в одном из множества бортовых контроллеров (1-6, 21-26), выполняют (S3) нормальный режим, в котором рабочие функции реализуются с использованием всего множества контроллеров (1-7, 21-26).
3. Способ управления транспортным средством с содействием при вождении по п. 1 или 2, в котором
разделение множества контроллеров (1-7, 21-26) включает в себя первую группу (A) контроллеров и вторую группу (B) контроллеров для построения топологии сети, и
сетевые линии связи/источники питания первой группы (A) контроллеров и второй группы (B) контроллеров электрически и физически независимы.
4. Способ управления транспортным средством с содействием при вождении по п. 3, в котором
транспортное средство с содействием при вождении является транспортным средством с автономным вождением, которое реализует по меньшей мере автономное вождение по одной полосе движения, когда выбран режим автономного вождения,
множество контроллеров (1-7, 21-26) совместно используют рабочую функцию исполнительного механизма и рабочую функцию распознавания периферии рассматриваемого транспортного средства при управлении автономным вождением,
когда выбран (S1) режим автономного вождения, определяют (S2), произошел ли отказ в любом из множества контроллеров (1-7, 21-26),
после определения (S2) того, что произошел отказ, информация об отказе отправляется (S5) в нормальную группу контроллеров, к которой отказавший контроллер не принадлежит, через сетевую линию связи (8-12, 27-28, 32-35), и выводится (S6) информация уведомления, которая уведомляет водителя о том, что произошел отказ, и
когда нормальная группа контроллеров принимает информацию об отказе через сетевую линию связи (8-12, 27-28, 32-35), контроллеры, составляющие нормальную группу контроллеров, выполняют (S7) режим отказа для дублирования рабочей функции отказавшей группы контроллеров, пока водитель не вернется к управлению.
5. Способ управления транспортным средством с содействием при вождении по п. 4, в котором
система рулевого управления транспортного средства с автономным вождением снабжена первым контроллером (7) рулевого управления, который включен в первую группу (A) контроллеров и который управляет первым исполнительным механизмом (51) рулевого управления, и вторым контроллером (26) рулевого управления, который включен во вторую группу (B) контроллеров и который управляет вторым исполнительным механизмом (52) рулевого управления, и
если рабочая функция, которая потеряна из-за отказа, является рабочей функцией исполнительного механизма рулевого управления, из первого контроллера (7) рулевого управления и второго контроллера (26) рулевого управления, контроллер, включенный в нормальную группу контроллеров, используется для выполнения режима отказа для дублирования потерянной рабочей функции.
6. Способ управления транспортным средством с содействием при вождении по п. 4 или 5, в котором
система управления тормозом транспортного средства с автономным вождением снабжена первым контроллером (6) тормоза, который включен в первую группу (A) контроллеров и который управляет первым тормозным исполнительным механизмом (53), и вторым контроллером (25) тормоза, который включен во вторую группу (B) контроллеров и который управляет вторым тормозным исполнительным механизмом (54, 55), и
если рабочая функция, которая потеряна из-за отказа, является рабочей функцией тормозного исполнительного механизма, из первого контроллера (6) тормоза и второго контроллера (25) тормоза, контроллер, включенный в нормальную группу контроллеров, используется для выполнения режима отказа для дублирования потерянной рабочей функции.
7. Способ управления транспортным средством с содействием при вождении по любому из пп. 4-6, в котором
система распознавания периферии рассматриваемого транспортного средства для автономного транспортного средства снабжена первым контроллером (4) распознавания полосы движения, который включен в первую группу (A) контроллеров и который распознает полосу движения рассматриваемого транспортного средства на основе положения рассматриваемого транспортного средства и высокоточной карты, и вторым контроллером (22) распознавания полосы движения, который включен во вторую группу (B) контроллеров и который распознает полосу движения рассматриваемого транспортного средства на основе информации изображения впереди рассматриваемого транспортного средства от передней камеры, и
если рабочая функция, которая потеряна из-за отказа, является рабочей функцией распознавания полосы движения рассматриваемого транспортного средства, из первого контроллера (4) распознавания полосы движения и второго контроллера (22) распознавания полосы движения, контроллер, включенный в нормальную группу контроллеров, используется для выполнения режима отказа для дублирования потерянной рабочей функции.
8. Способ управления транспортным средством с содействием при вождении по любому из пп. 4-7, в котором
система распознавания периферии рассматриваемого транспортного средства для автономного транспортного средства снабжена первым контроллером (3) распознавания препятствий впереди, который включен в первую группу (A) контроллеров и который распознает препятствие впереди рассматриваемого транспортного средства на основе радиолокационной информации от переднего радара, и вторым контроллером (22) распознавания препятствий впереди, который включен во вторую группу (B) контроллеров и который распознает препятствие впереди рассматриваемого транспортного средства на основе данных изображения впереди рассматриваемого транспортного средства от передней камеры, и
если рабочая функция, которая потеряна из-за отказа, является рабочей функцией распознавания препятствий впереди рассматриваемого транспортного средства, из первого контроллера (3) распознавания препятствий впереди и второго контроллера (22) распознавания препятствий впереди, контроллер, включенный в нормальную группу контроллеров, используется для выполнения режима отказа для дублирования потерянной рабочей функции.
9. Способ управления транспортным средством с содействием при вождении по любому из пп. 4-8, в котором
система распознавания периферии рассматриваемого транспортного средства для автономного транспортного средства снабжена первым контроллером (5) распознавания боковых препятствий, который включен в первую группу (A) контроллеров и который распознает боковое препятствие рассматриваемого транспортного средства на основе радиолокационной информации от боковых радаров, и вторым контроллером (23) распознавания боковых препятствий, который включен во вторую группу (B) контроллеров и который распознает боковые препятствия рассматриваемого транспортного средства на основе информации сонара от сонаров, и
если рабочая функция, которая потеряна из-за отказа, является рабочей функцией распознавания боковых препятствий рассматриваемого транспортного средства, из первого контроллера (5) распознавания боковых препятствий и второго контроллера (22) распознавания боковых препятствий, контроллер, который включен в нормальную группу контроллеров, используется для выполнения режима отказа для дублирования потерянной рабочей функции.
10. Система управления для транспортного средства с содействием при вождении, включающего в себя множество контроллеров (1-7, 21-26), которые совместно используют рабочие функции при управлении содействием при вождении, в котором множество контроллеров (1-7, 21-26), которые соответственно совместно используют рабочую функцию исполнительного механизма и рабочую функцию распознавания периферии рассматриваемого транспортного средства при управлении содействием при вождении, разделено на множество групп (A, B) контроллеров для построения топологии сети, содержащая:
блоки (1a, 21a) определения отказа, выполненные с возможностью определения (S2) того, произошел ли отказ в любом из множества контроллеров (1-7, 21-26),
блоки (1b, 21b) передачи информации об отказе, выполненные с возможностью отправки (S5) информации об отказе в нормальную группу контроллеров, отличную от отказавшей группы контроллеров, к которой принадлежит отказавший контроллер, через сетевую линию связи (8-12, 27-28, 32-35) после определения (S2) того, что отказ произошел в любом из множества контроллеров (1-7, 21-26), и
блоки (1c, 21c) отказоустойчивого управления, выполненные с возможностью выполнения (S7) режима отказа для дублирования рабочей функции, которая потеряна из-за отказа, с использованием контроллеров, составляющих нормальную группу контроллеров, когда нормальная группа контроллеров принимает информацию об отказе через сетевую линию связи (8-12, 27-28, 32-35),
отличающаяся тем, что
топология сети основана на архитектуре, которая реализует эквивалентные рабочие функции с каждой из групп (A, B) контроллеров и
блоки (1c, 21c) отказоустойчивого управления выполнены с возможностью продолжения выполнения (S7) режима отказа до тех пор, пока водитель не вернется к управлению.
| DE 102014213171 A1, 15.10.2015 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| ПРИМЕНЕНИЕ РАЗАГИЛИНА ДЛЯ ЛЕЧЕНИЯ ОБОНЯТЕЛЬНОЙ ДИСФУНКЦИИ | 2011 |
|
RU2587330C2 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| EP 3305620 A1, 11.04.2018. | |||

