Способ принудительной посадки беспилотного летательного аппарата вертолетного типа на посадочную площадку корабля относится к авиационной технике и касается устройств и механизмов для обеспечения посадки БПЛА на корабль.
Возможность применения корабельных летательных аппаратов вертолетного типа существенно зависит от гидрометеоусловий. Полеты летательных аппаратов вертолетного типа с борта корабля, не оборудованного специальными системами посадки, могут выполняться при бортовой качке, не превышающей 8 град. Даже при хороших погодных условиях не всегда абсолютно точно производится посадка, причем разброс точек касания опор шасси укладывается в круг диаметром 2…3 м, а при плохих погодных условиях посадка летательных аппаратов вертолетного типа становится невозможной без применения способов принудительной посадки.
Известен способ принудительной посадки на палубу корабля вертолета ASIST (см. фиг. П1) (Aircraft Ship Integrated Secure and Traverse - корабельная интегрированная система посадки и буксировки вертолетов) [1].
Способ принудительной посадки на палубу корабля вертолета ASIST работает следующим образом.
Выравнивают скорости и курсы вертолета и корабля, стабилизируют положение вертолета над точкой посадки на посадочной площадке корабля, с борта вертолета опускают выдвижной гидравлический основной зонд и фиксируют его в устройстве быстрой фиксации, встроенном в посадочную площадку корабля, производят посадку вертолета на посадочную площадку корабля, используя основной зонд как жесткую направляющую.
Недостатком данного способа посадки являются высокие требования по стабилизации расположения вертолета относительно посадочной площадки корабля в процессе посадки.
Наиболее близким прототипом к заявляемому способу посадки является способ принудительной посадки на палубу корабля вертолета RAST (см. фиг. П2) (Recovery Assist, Secure and Traverse - система обеспечения посадки, закрепления (фиксации) вертолета и его буксировки в ангар) [1].
Способ посадки при помощи системы принудительной посадки на палубу корабля вертолета RAST работает следующим образом.
Выравнивают скорости и курсы вертолета и корабля, стабилизируют положение вертолета над точкой посадки на посадочной площадке корабля, подают на палубу корабля бросательный конец, соединяют его с силовым тросом корабельной лебедки, силовой трос поднимают на борт вертолета и фиксируют в автоматическом замке, притягивают вертолет к посадочной площадке корабля силовым тросом, наматывая его на лебедку, производят посадку вертолета.
Основным недостатком данного способа принудительной посадки являются высокие требования по стабилизации расположения вертолета над точкой посадки на посадочной площадке корабля в процессе посадки.
Предлагаемый способ принудительной посадки беспилотного летательного аппарата вертолетного типа обеспечивает посадку при бортовой и килевой качке корабля, как имеющего ход, так и лежащего в дрейфе. Предлагаемый способ более прост в эксплуатации по сравнению с основным прототипом.
Сущность способа принудительной посадки заключается в том, что в процессе посадки посадочный трос располагается не вертикально, а с наклоном на угол 45…55 град в сторону кормы.
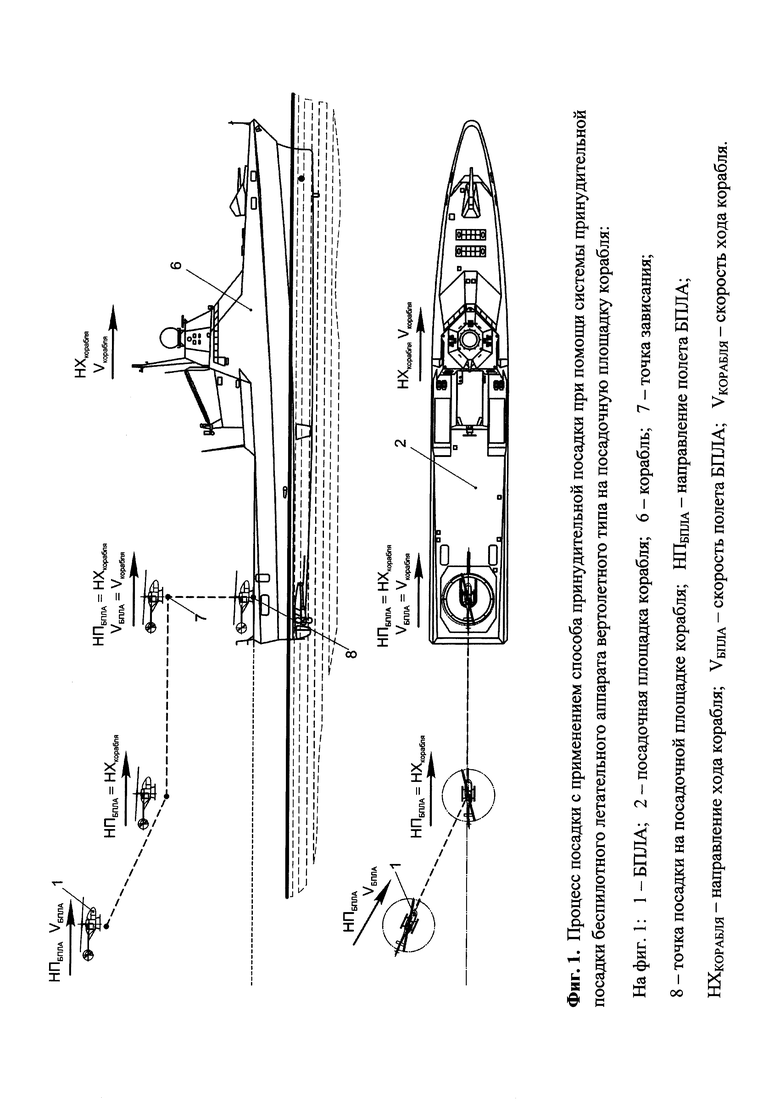
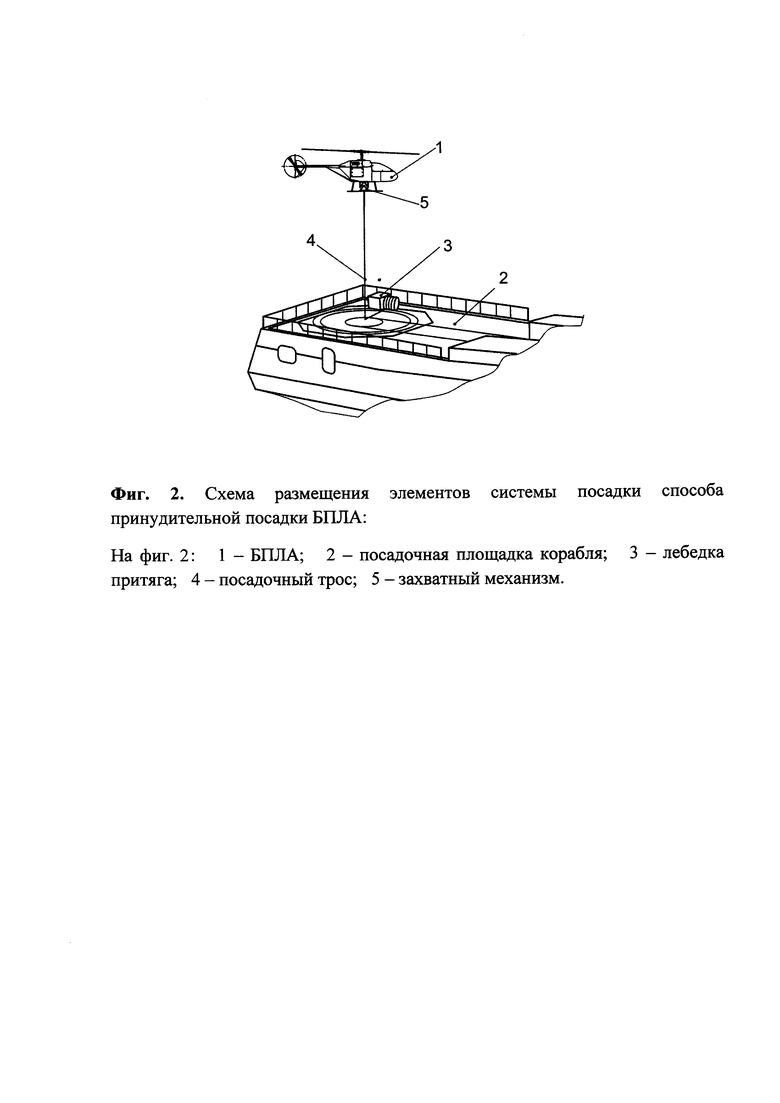
Процесс принудительной посадки беспилотного летательного аппарата вертолетного типа на посадочную площадку корабля приведен на фиг. 1. Схема размещения элементов системы посадки приведена на фиг. 2.
Способ принудительной посадки беспилотного летательного аппарата вертолетного типа на посадочную площадку корабля работает следующим образом.
Выравнивают скорость и курс беспилотного летательного аппарата 1 со скоростью и курсом корабля 6, стабилизируют беспилотный летательный аппарат в точке зависания 7 над точкой посадки на палубе 8, летательный аппарат и корабль соединяют посадочным тросом 4, подаваемым или с борта корабля, или с борта беспилотного летательного аппарата, свободный конец посадочного троса фиксируют в захватном механизме 5 и притягивают летательный аппарат 1 к посадочной площадке корабля 2, наматывая посадочный трос 4 на лебедку притяга 3, и производят посадку, способ отличается от основного прототипа тем, что для снижения требований по стабилизации беспилотного летательного аппарата 1 относительно посадочной площадки корабля 2 и тем самым упрощения процесса посадки посадочный трос 4 при притяге удерживают с наклоном на угол 45…55 град к корме.
Достижение заявленного технического результата в предлагаемом способе принудительной посадки обеспечивается путем захвата и притяга беспилотного летательного аппарата 1 к посадочной площадке корабля 2 при помощи посадочного троса 4 и лебедки притяга 3. После фиксации посадочного троса 4 бортовая система управления уводит беспилотный летательный аппарат 1 назад к корме относительно точки посадки с таким расчетом, чтобы посадочный трос 4 отклонился от вертикали на угол 45…55 град, и увеличивает подъемную силу на несущем винте - происходит натяжение посадочного троса 4. Такое отклонение посадочного троса 4 создает систему, при которой корабль 6 выступает в роли буксировщика беспилотного летательного аппарата 1. За счет увеличенной подъемной силы на несущем винте создается тормозящее усилие, которое стабилизирует беспилотный летательный аппарат 1 в воздухе относительно точки посадки 8 на посадочной площадке корабля 2. При этом возникающие перемещения точки посадки 8 в горизонтальной плоскости будут приводить к аналогичным перемещениям беспилотного летательного аппарата 1 в воздухе, то есть обеспечивать синхронное, одинаковое смещение летательного аппарата и посадочной площадки палубы корабля. Данное решение является ключевым и позволяет снизить необходимые требования по стабилизации беспилотного летательного аппарата 1 относительно точки посадки 8.
Отклонение посадочного троса 4 от вертикали на угол меньше или больше заявленного не обеспечивает достижение заявленного технического результата. Отклонение посадочного троса 4 от вертикали на угол менее 45 градусов не даст возможности создать систему, при которой корабль 6 выступает в роли буксировщика беспилотного летательного аппарата 1, и посадка будет производиться фактически вертикально с сохранением высоких требований по стабилизации беспилотного летательного аппарата 1 относительно посадочной площадки корабля 2. При отклонении посадочного троса 4 от вертикали на угол более 55 градусов в процессе посадки возникающие перемещения точки посадки 8 в горизонтальной плоскости могут привести к опрокидыванию беспилотного летательного аппарата 1 в воздухе.
Источники информации
1. Статья - Артемьев А. Морские вертолеты. Техника и вооружение вчера, сегодня, завтра (спецвыпуск). РОО «Техинформ», Москва, 2001, №8.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система посадки беспилотных летательных аппаратов | 2024 |
|
RU2834064C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС АВИАНЕСУЩЕГО КОРАБЛЯ | 2012 |
|
RU2494005C1 |
| Способ посадки беспилотного вертолета на движущееся судно | 2020 |
|
RU2747587C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС С УНИВЕРСАЛЬНЫМ СИЛОВЫМ УСТРОЙСТВОМ | 2012 |
|
RU2497714C2 |
| УСТРОЙСТВО ДЛЯ ВЗЛЕТА И ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2694251C2 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678407C1 |
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678408C1 |
| Система огней глиссады, обеспечивающая визуальную и оптическую посадку в очках ночного видения вертолета на корабль в темное время суток | 2017 |
|
RU2671926C1 |
| Многофункциональное судно обеспечения морских буровых платформ и комплекс судовой системы грузообработки для применения на многофункциональном судне | 2020 |
|
RU2747109C1 |
Изобретение относится к способам принудительной посадки летательного аппарата на борт корабля. Способ принудительной посадки беспилотного летательного аппарата (1) вертолетного типа на палубу корабля заключается в том, что выравнивают скорость и курс беспилотного летательного аппарата (1) со скоростью и курсом корабля. Далее стабилизируют беспилотный летательный аппарат (1) в точке зависания над точкой посадки на палубе. Летательный аппарат (1) и корабль соединяют посадочным тросом (4), подаваемым или с борта корабля, или с борта беспилотного летательного аппарата. Свободный конец посадочного троса (4) фиксируют в захватном механизме (5) и притягивают летательный аппарат к посадочной площадке (2) корабля. Посадочный трос (4) наматывают на лебедку (3) притяга. Беспилотный летательный аппарат (1) уводят назад к корме относительно точки посадки с таким расчетом, чтобы посадочный трос (4) отклонился от вертикали на 45-55 град, и создают тормозящее усилие, увеличивая подъемную силу на несущем винте. Посадочный трос (4) при притяге удерживают с наклоном на угол 45…55 град к корме. Изобретение упрощает стабилизацию положения летательного аппарата относительно палубы корабля, обеспечивает синхронное, одинаковое смещение летательного аппарата и посадочной площадки палубы корабля. 2 ил.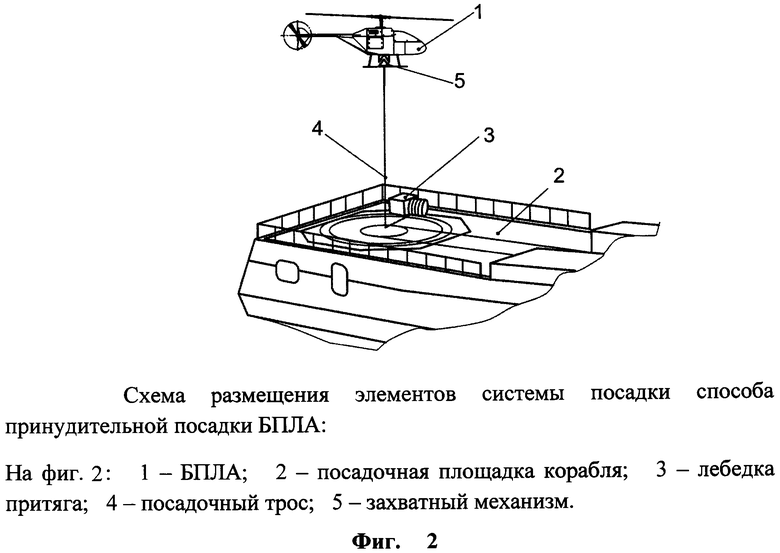
Способ принудительной посадки беспилотного летательного аппарата вертолетного типа на палубу корабля, при котором выравнивают скорость и курс беспилотного летательного аппарата со скоростью и курсом корабля, стабилизируют беспилотный летательный аппарат в точке зависания над точкой посадки на палубе, летательный аппарат и корабль соединяют посадочным тросом, подаваемым или с борта корабля, или с борта беспилотного летательного аппарата, свободный конец посадочного троса фиксируют в захватном механизме и притягивают летательный аппарат к посадочной площадке корабля, наматывая посадочный трос на лебедку притяга, отличающийся тем, что для снижения требований по стабилизации беспилотного летательного аппарата относительно посадочной площадки корабля и тем самым упрощения процесса посадки уводят беспилотный летательный аппарат назад к корме относительно точки посадки с таким расчетом, чтобы посадочный трос отклонился от вертикали на 45-55 град, и создают тормозящее усилие, увеличивая подъемную силу на несущем винте, при этом посадочный трос при притяге удерживают с наклоном на угол 45…55 град к корме.
| Способ посадки вертолета и система для его осуществления | 1991 |
|
SU1819822A1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА НА АЭРОФИНИШЕР | 2009 |
|
RU2399560C1 |
| US 3278680 A1, 11.10.1966 | |||
| US 3158834 A1, 24.11.1964. | |||

