ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ, И УРОВЕНЬ ТЕХНИКИ
Коммерческие воздушные летательные аппараты могут генерировать и использовать большое количество электроэнергии. Например, большой пассажирский или грузовой самолет своими главными двигателями может генерировать электрическую мощность более одного мегаватта. Эту энергию необходимо модифицировать для обеспечения возможности ее использования различными потребителями энергии посредством блоков преобразования энергии (Power Conversion Units, PCU) и контроллеров двигателя.
Блоки преобразования энергии (PCU) призваны осуществлять преобразование энергии самолета высокого или среднего напряжения переменной частоты в энергию, имеющую различные частоты и/или напряжения. Например, низкое напряжение необходимо для питания оборудования (например, световых приборов, бортовой кухни, вентиляторов охлаждения). Высокое напряжение постоянного тока (HVDC) также необходимо для питания контроллеров для управления крупными двигателями, для приведения в действие гидравлических насосов, а также компрессоров различных типов. Низкое напряжение постоянного тока (LVDC) необходимо для питания радиоэлектронного оборудования, а среднее напряжение постоянного тока (MVDC) необходимо для подачи питания на электрические тормоза. Одним из механизмов, которые могут быть использованы для преобразования энергии, являются импульсные преобразователи энергии на основе широтно-импульсной модуляции ШИМ (PWM).
В импульсных преобразователях энергии, которые могут быть применены в блоках преобразования энергии (PCU), осуществляется коммутация, приводящая к генерированию шума в виде электромагнитных помех, который может мешать нормальной эксплуатации воздушного летательного аппарата (например, его радио- и навигационного оборудования). Для обеспечения возможности управляемого воздействия на этот нежелательный шум в виде электромагнитных помех (EMI noise) в блоках преобразования энергии (PCU) и системах привода двигателя используют фильтры электромагнитных помех. При решении некоторых задач в аэрокосмической промышленности, например на самолетах, на фильтры электромагнитных помех может приходиться 50% (или даже более) веса и объема преобразователей энергии. Конструирование фильтров электромагнитных помех для самолетного оборудования для преобразования энергии или для иных применений в аэрокосмической промышленности может оказаться сложной задачей вследствие строгих требований в отношении электромагнитных помех и ограничений по весу и объему, которые могут налагаться на оборудование для преобразования энергии и управления двигателем.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Следует отметить, что настоящий раздел "Раскрытие изобретения" приведен для введения в упрощенной форме разнообразных концепций, которые описаны далее в разделе "Осуществление изобретения". Это "Раскрытие изобретения" не предназначено для ограничения объема заявленного объекта.
Способы, компьютерочитаемый носитель для хранения данных и устройство, раскрытые в настоящем документе, относятся к конструированию системы питания привода двигателя, содержащей оборудование для преобразования энергии в импульсном режиме. В соответствии с одним аспектом раскрыт способ конструирования фильтров электромагнитных помех для оборудования преобразования энергии в импульсном режиме, которое может быть использовано в аэрокосмической промышленности. Способ включает этапы, на которых определяют систему привода двигателя, которая включает в себя контроллер двигателя и фидер, который соединяет контроллер двигателя с электрическим двигателем. Определяют точку резонанса для системы привода двигателя и смещают ее к смещенной точке резонанса для системы привода двигателя, которая имеет более высокую частоту по сравнению с первоначальной точкой резонанса. Конструируют для смещенной точки резонанса фильтр электромагнитных помех, который является частью системы привода двигателя.
В соответствии еще с одним аспектом раскрыта система, содержащая фильтр электромагнитных помех, сконструированный для смещенной точки резонанса, которая смещена от точки резонанса, связанной с низкой частотой. Система включает в себя один или более контроллеров двигателя, один или более фидеров, соединенных с указанным одним или более контроллеров двигателя, и один или более фильтров электромагнитных помех, которые соединены по меньшей мере с одним из контроллеров двигателя. Конструируют фидеры по меньшей мере частично с учетом параметра полного сопротивления, при котором происходит смещение точки резонанса комбинированного полного сопротивления указанных одного или более фидеров и одного или более электрических двигателей к смещенной точке резонанса. Конструируют фильтры электромагнитных помех по меньшей мере частично на основе смещенной точки резонанса.
В соответствии еще с одним аспектом раскрыт компьютерочитаемый носитель для хранения данных для конструирования системы питания привода двигателя, который включает в себя оборудование преобразования энергии в импульсном режиме. Компьютерочитаемый носитель включает в себя исполняемые компьютером команды, сохраненные на нем, которые при исполнении компьютером, содержащим аппаратные средства и программное обеспечение, вынуждают компьютер выполнять действия. В результате выполнения команд компьютер осуществляет доступ к параметру системы привода двигателя, которая включает в себя модель контроллера двигателя и модель фидера. В результате выполнения команд компьютер также осуществляет смещение точки резонанса для системы привода двигателя и определяет параметры полного сопротивления, при которых происходит смещение точки резонанса для системы привода двигателя к более высокому значению частоты к смещенной точке резонанса. Команды используются для конструирования фильтра электромагнитных помех (EMI) для смещенной точки резонанса.
Раскрытые признаки, функции и преимущества могут быть реализованы независимо в различных вариантах реализации настоящего раскрытия или могут быть скомбинированы в других вариантах его реализации, более детальное раскрытие которых может быть очевидным со ссылкой на нижеследующее описание и чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На ФИГ. 1 проиллюстрированы система привода двигателя и график усиления в результате ввода фильтров электромагнитных помех, показывающий точку резонанса и смещенную точку резонанса;
на ФИГ. 2 проиллюстрирована работа двух инверторов с чередованием с переменным углом чередования и уменьшением чистого (bare) шума на конкретных частотах при использовании конкретных углов чередования;
на ФИГ. 3 изображена блок-схема системы управления, которая измеряет кондуктивные электромагнитные помехи на выходе контроллера двигателя и включает в себя устройство управления углом чередования (interleaving angle controller);
на ФИГ. 4 проиллюстрирован активный фильтр электромагнитных помех системы привода двигателя;
на ФИГ. 5А и ФИГ. 5В показан приведенный в качестве иллюстрации алгоритм конструирования системы привода двигателя, который уменьшает электромагнитные помехи; и
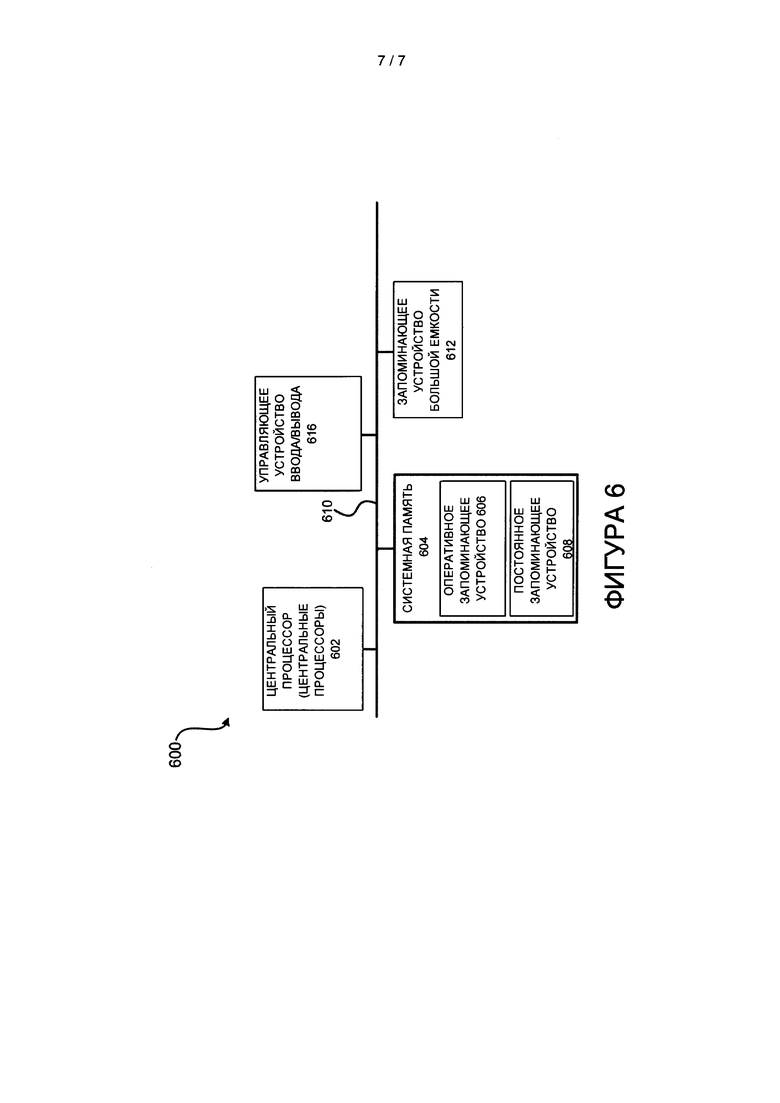
на ФИГ. 6 проиллюстрирован компьютер, на котором может быть произведен конструкторский расчет системы привода двигателя согласно различным вариантам реализации настоящего изобретения, раскрытым в настоящем документе.
Каждый чертеж, показанный в настоящем документе, иллюстрирует вариант аспекта представленного варианта реализации, и подробно описываются только их отличия.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Следующий раздел "Осуществление изобретения" относится к конструированию системы питания привода двигателя, которая включает в себя оборудование преобразования энергии в импульсном режиме. В одном примере конструируют фильтры электромагнитных помех, которые содержатся в системе питания привода двигателя, для переключения на более высоких частотах таким образом, что они имеют меньший вес по сравнению с подобными фильтрами электромагнитных помех, которые используются в аэрокосмической промышленности.
С использованием концепций и технологий, описанных в данном документе, производят конструирование фильтров электромагнитных помех, применяемых с оборудованием для преобразования энергии в импульсном режиме, в аэрокосмической промышленности с учетом смещенной точки резонанса, которая имеет более высокую частоту по сравнению с первоначальной точкой резонанса. Конструированием фильтра электромагнитных помех с учетом смещенной точки резонанса можно уменьшить вес фильтра электромагнитных помех, поскольку вес фильтра электромагнитных помех определяется содержащимися в нем компонентами (например, индуктивными, емкостными). В общем случае вес фильтра электромагнитных помех может быть уменьшен посредством смещения фильтрации, выполняемой фильтром электромагнитных помех, к более высокому значению частоты. В процессе конструирования системы привода двигателя могут быть протестированы (например, смоделированы) различные конфигурации системы привода двигателя для определения параметров (например, необходимых полных сопротивлений), которые могут быть использованы при разработке фидеров и двигателей, содержащихся в системе привода двигателя.
В нижеследующем подробном описании приведены ссылки на прилагаемые чертежи, которые составляют часть данного описания и которые приведены в качестве иллюстрации, конкретных вариантов реализации изобретения или примеров. Со ссылкой на чертежи, на которых одинаковые ссылочные позиции представляют одинаковые элементы для нескольких чертежей, будут описаны перенастраиваемый столик и способ его использования согласно различным вариантам реализации настоящего изобретения.
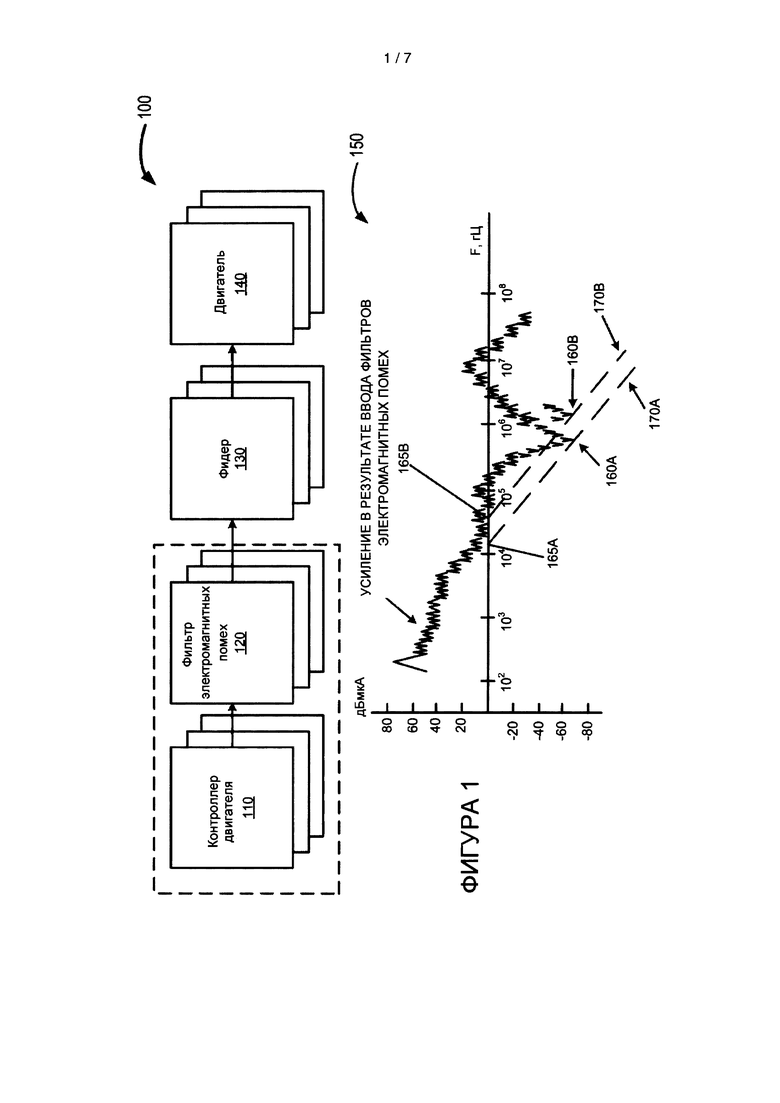
На ФИГ. 1 проиллюстрирована система 100 привода двигателя с графиком 150 усиления в результате ввода фильтров электромагнитных помех, на котором показана точка 160А резонанса и смещенная точка 160В резонанса. Как видно на чертеже, система 100 привода двигателя включает в себя один или более контроллеров 110 двигателей, один или более фильтров 120 электромагнитных помех, один или более фидеров 130 и один или более двигателей 140. В целом, контроллеры 110 двигателей, фильтры 120 электромагнитных помех, фидеры 130 и двигатели 140 выполнены и модифицированы с учетом решаемых с их помощью задач. Например, контроллеры 110 двигателей, фильтры 120 электромагнитных помех, фидеры 130 и двигатели 140 обычно различаются для различных конструкций самолетов.
Как кратко раскрыто выше, на фильтры 120 электромагнитных помех, которые являются частью системы 100 привода двигателя, может приходиться большая доля веса (например, более 50%) системы 100 привода двигателя. Конструирование фильтра 120 электромагнитных помех в целом производят таким образом, чтобы он отвечал требованиям, приведенным в технических условиях, в отношении электромагнитных помех, которые являются частью стандартов для аэрокосмической промышленности. В настоящем примере один или более фильтров 120 электромагнитных помех конструируют с учетом смещенной точки 160В резонанса, которая смещена к более высокому значению частоты по сравнению с первоначальной точкой 160А резонанса. Вес и объем фильтра 120 электромагнитных помех могут быть уменьшены путем недопущения или регулирования резонансов между контроллерами 110 двигателей, фидерами 130 и двигателями 140. В одном примере конструирование фильтра 120 электромагнитных помех может быть произведено с учетом самого неблагоприятного случая чистого (bare) шума в виде электромагнитных помех, создаваемого соответствующим контроллером 110 двигателя. Фильтры 120 электромагнитных помех также могут быть выполнены для других сценариев и параметров электромагнитных помех. Например, фильтры 120 электромагнитных помех могут быть выполнены для других параметров электромагнитных помех, которые могут быть не такими строгими, как для сценария самого неблагоприятного случая.
В одном примере контроллерами 110 двигателей можно управлять различными двигателями 140, которые выполняют различные операции. Например, один из двигателей 140 может управлять гидравлическими насосами, а другой из двигателей 140 может осуществлять привод воздушных компрессоров. Другие двигатели могут быть выполнены с возможностью выполнения других операций. Каждый из двигателей 140 соединен с контроллером 110 двигателя посредством фидера 130.
В целом, фидер 130 содержит один или более кабелей, по которым к двигателям 140 поступает питание и по возможности иная информация. Фидер 130 может быть смоделирован индуктивными или емкостными элементами, которые обеспечивают функцию переноса, которая включает в себя точки резонанса. Фидеры 130 и двигатели 140 каждый имеют связанное с ними полное сопротивление. Например, двигатели 140 предоставляются одним поставщиком, а фидеры 130 предоставляются другим поставщиком. Как было описано в настоящем документе, определяют параметры для фидеров 130 и двигателей 140 и предоставляют их поставщику, так что предоставленные фидеры 130 и двигатели 140 отвечают предоставленным параметрам. Параметры для фидеров 130 и двигателей основываются на смещенной точке 160В резонанса таким образом, что вес фильтра 120 электромагнитных помех может быть уменьшен.
Более конкретно, между контроллерами 110 двигателей, фидерами 130 и двигателями 140 возникают резонансы, которые могут усиливать шум на конкретных частотах. Это усиление оказывает влияние на конструкцию и вес фильтров 120 электромагнитных помех. График 150 усиления в результате ввода фильтров электромагнитных помех иллюстрирует, как точки резонанса влияют на частоту излома фильтров электромагнитных помех.
Усиление в результате ввода может быть рассчитано путем вычитания чистого шума преобразователя энергии из параметров электромагнитных помех (например, "Стандарт DO-160: испытания авиационного оборудования" (DO-160 environmental Conditions and Test Procedures for Airborne Equipment standard) или некоторые другие стандарты или технические условия). В целях объяснения примем, что L-C фильтр (например, фильтр на основе индуктивных и емкостных элементов) обеспечивает затухание в 40 дБ/разряд (dB/decade), как показано пунктирной линией 170А и пунктирной линией 170В.
В этом проиллюстрированном примере частота 165А излома (fc=1/2π√LC) фильтра может быть получена путем проведения пунктирной линии 170А с наклоном -40 дБ/разряд от точки 160А резонанса в самом неблагоприятном случае до пересечения с осью частот. Это помогает убедиться в том, что ослабление, вносимое фильтром, является достаточным даже в самой неблагоприятной точке резонанса, и, следовательно, указанное требование, приведенное в технических условиях, в отношении электромагнитных помех, удовлетворяется. Из графика 150 усиления в результате ввода фильтров электромагнитных помех можно увидеть, что если точка резонанса имеет меньшую величину или появляется на более высокой частоте, частота излома фильтра может быть перемещена к более высокой частоте. В этом указанном примере частота 165А излома перемещается к частоте 165В излома. В целом, более высокая частота излома фильтра 120 электромагнитных помех преобразуется в более низкое значение индуктивности и электрической емкости, которое используется для реализации фильтра 120 электромагнитных помех. Низкие значения индуктивности и электрической емкости обычно соответствуют меньшим, более легким и более эффективным конструкциям фильтра 120 электромагнитных помех.
Точки резонанса в отношении чистого шума (или усиления в результате ввода) зависят от индуктивностей и электрических емкостей фидеров и двигателей. Следовательно, посредством установления параметров полного сопротивления для фидеров 130 и двигателей 140 точки резонанса могут быть исключены или смещены (например, от первоначальной точки 160А резонанса к смещенной точке 160В резонанса), что уменьшает вес фильтра 120 электромагнитных помех.
Другие механизмы также могут быть использованы для уменьшения веса системы привода двигателя, такой как система 100 привода двигателя. Например, при выполнении фильтров 120 электромагнитных помех для контроллеров 110 двигателей может использоваться сочетание требований по полному сопротивлению, предъявляемых поставщикам кабелей и двигателей, с размещением вдоль кабеля легких пассивных компонентов. Например, легкие пассивные элементы (например, такие как ферритовые шайбы) могут быть размещены вдоль фидеров 130 в различных местах и зачастую закрывать выводные контакты двигателей. Эти легкие пассивные элементы могут осуществлять сдвиг точек резонанса между фидерами 130 и двигателями 140. В целом, ферритовая шайба является электрическим компонентом, который подавляет высокочастотный шум в электронных схемах. Ферритовая шайба может быть использована для уменьшения помех, поступающих от устройства или на устройство. Этот механизм на основе легких пассивных элементов может быть использован в дополнение к сдвигу точки резонанса посредством уточнения конструкций фидеров 130 или двигателей 140.
В целом, может рассматриваться любой механизм, который приводит к изменению полного сопротивления системы из двигателей и фидеров со смещением резонансов к более высоким частотам, чтобы определять, произошло ли уменьшение веса системы 100 привода двигателя до необходимого значения веса, и/или чтобы определять, произошло ли уменьшение рабочих требований фильтрования к фильтрам 120 электромагнитных помех (например, фильтрование на более высокой частоте). Еще в одном примере экранирование на фидере 130 может быть использовано для уменьшения веса фильтра 120 электромагнитных помех.
Экранирование, выполненное фрагментарно, может приводить к минимальному увеличению веса фидера 130, но при этом ведет к значительному облегчению веса фильтра 120 электромагнитных помех для контроллера 110 двигателя. Для определения плотности экранирования фидера могут быть проведены исследования с целью оптимизации веса системы 100 привода двигателя.
В другом механизме, который может быть использован для уменьшения общего веса системы 100 привода двигателя, используются контроллеры двигателя с чередованием (например, см. ФИГ. 3). Если в системе 100 привода двигателя используются контроллеры двигателя, работающие с чередованием, то согласно варианту реализации изобретения используются межфазные элементы с реактивным сопротивлением. Межфазные элементы с реактивным сопротивлением (которые приводят к увеличению веса системы 100 привода двигателя) используются для уменьшения токов, циркулирующих между инверторами контроллеров 110 двигателей. В целом, чередование позволяет произвести выборочное уменьшение шума в виде электромагнитных помех в зависимости от выбранного угла чередования. Традиционное чередование с углом 180 градусов устраняет нечетные гармоники в выходном волновом сигнале. Чередование с другими углами не устраняет нечетные гармоники полностью, однако ослабляет их. Четные гармоники также ослабляются.
На ФИГ. 2 проиллюстрирована работа двух инверторов с чередованием (interleaving) с переменным углом чередования и уменьшением чистого (bare) шума на конкретных частотах при использовании конкретного угла чередования. В этом проиллюстрированном примере два инвертора генерируют одинаковый синусоидальный опорный сигнал 210. При этом сигнал несущей частоты (например, сигнал 230А несущей частоты), который используется для создания широтно-импульсной модуляция ШИМ (PWM), сдвинут по фазе на произвольный угол α 220, как показано сигналом 230В несущей частоты. Как коротко было описано выше, контроллер 110 двигателя может быть выполнен в качестве контроллера двигателя, работающего с чередованием. Угол α 220 чередования (interleaving angle) может быть выбран с учетом определенных точек резонанса для системы 100 привода двигателя. Например, угол α 220 чередования может быть выбран с учетом типа используемого фидера 130. Например, угол α 220 чередования в 15 градусов может быть использован для фидера 130 для уменьшения электромагнитных помех, а угол α 220 чередования в 20 градусов или какой-либо иной угол чередования может быть использован для уменьшения электромагнитных помех для другого фидера 130.
Уменьшения 250 чистого (bare) шума проиллюстрированы примерами графиков уменьшения чистого шума на конкретных частотах при использовании конкретного угла чередования. Угол чередования может быть выбран таким, что чистый шум, генерируемый контроллером двигателя, работающим с чередованием, является минимальным в точке резонансной частоты фидера 130 и/или двигателя 140. Таким образом могут смягчены требования к ослаблению, вносимому фильтром, и частота излома фильтров электромагнитных помех может быть сдвинута к более высокому значению частоты, что может привести к облегченной конструкции фильтра.
График 250А чистого шума показывает отсутствие использования чередования. График 250В чистого шума показывает использование чередования с углом 180 градусов, которое устраняет нечетные гармоники. График 250С чистого шума показывает использование первого угла чередования, который приводит к ослаблению гармоник на конкретной частоте. График 250D чистого шума показывает использование второго угла чередования, который приводит к ослаблению гармоник на конкретной частоте. Хотя при чередовании с углом 180 градусов, показанном на графике 250В чистого шума, не обеспечивается устранение гармоник, график 250С чистого шума и график 250D чистого шума показывают уменьшение гармоник. Как раскрыто в настоящем документе, уменьшение гармоник на резонансной частоте может приводить к уменьшению веса фильтра 120 электромагнитных помех. Система привода двигателя, такая как система 300 привода двигателя, показанная на ФИГ. 3, может регулировать углы чередования при изменении режимов контроллера двигателя, например при переключении режимов многофункциональных контроллеров двигателем.
Многофункциональные контроллеры двигателя часто используются в аэрокосмической промышленности. Например, многофункциональные контроллеры двигателя могут представлять собой один тип контроллера 110 двигателя, который может быть использован на самолете. Многофункциональные контроллеры двигателя выполнены с возможностью осуществления привода различных нагрузок в различное время. Например, один и тот же контроллер 110 двигателя может быть выполнен с возможностью осуществления в один момент времени привода гидравлического насоса, а в другой момент времени подачи питания компрессору установки для получения азота.
Многофункциональные контроллеры 110 двигателя, как правило, имеют различные фидеры 130 и различные двигатели 140 и поэтому имеют различные резонансы, которые учитываются во время выполнения фильтра электромагнитных помех. Следовательно, не всегда возможно произвести выполнение многофункционального контроллера двигателя с одним фиксированным углом чередования. В этом случае может быть использовано выполнение системы управления с замкнутым контуром, которая измеряет кондуктивные электромагнитные помехи на выходе контроллера двигателя и регулирует угол чередования для минимизирования электромагнитных помех.
Когда происходит изменение режима работы многофункционального контроллера двигателя с переходом от решения одной задачи к решению другой задачи, происходит изменение угла чередования с измерением кондуктивных электромагнитных помех. Затем, когда достигнут минимум кондуктивных электромагнитных помех, этот угол чередования выбирают для дальнейшей работы контроллеры двигателя в этом конкретном режиме.
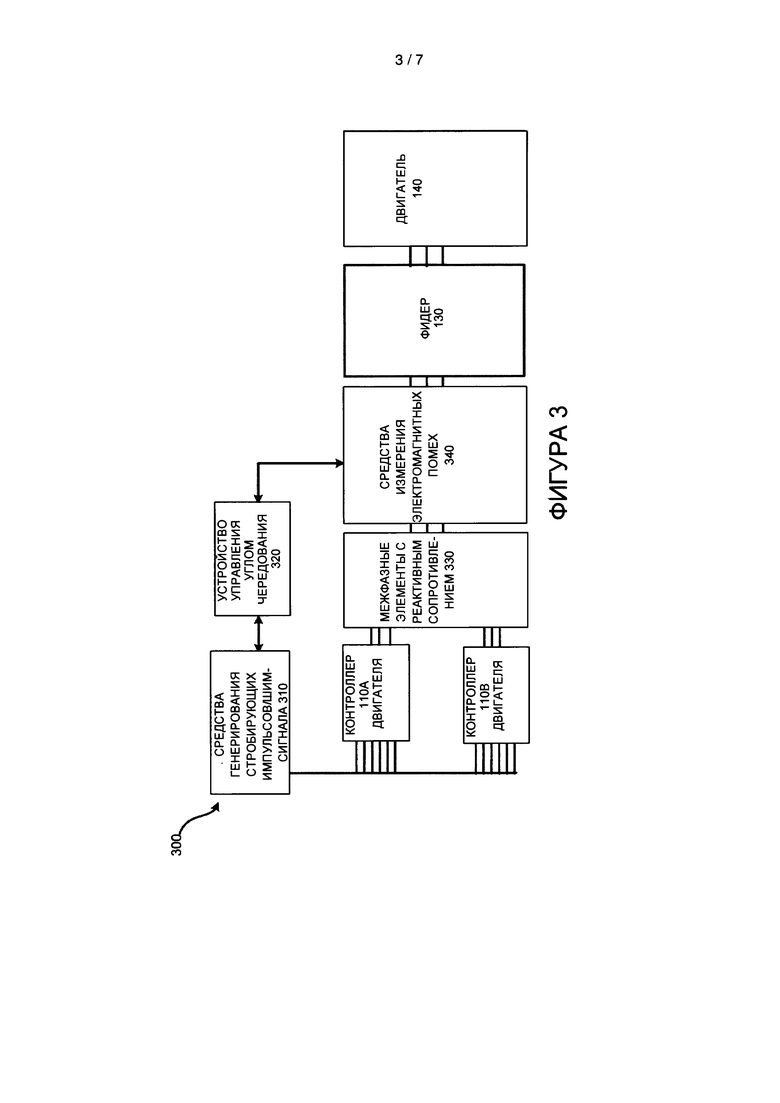
На ФИГ. 3 показана блок-схема системы 300 привода двигателя, которая измеряет кондуктивные электромагнитные помехи на выходе контроллера 110 двигателя и включает в себя устройство 329 управления углом чередования. Как показано на чертеже, система 300 привода двигателя включает в себя средства 310 генерирования стробирующих импульсов/ШИМ-сигнала, устройство 329 управления углом чередования, контроллер 110А двигателя, контроллер 110В двигателя, межфазные элементы 330 с реактивным сопротивлением, средства 340 измерения электромагнитных помех, один или более фидеров 130 и один или более двигателей 140.
Одним механизмом, который может быть использован для уменьшения электромагнитных помех, является изменение угла чередования посредством управления с разомкнутым контуром с использованием устройства 320 управления углом чередования. Например, для каждого режима работы многофункционального контроллера 110А двигателя и контроллера 110В двигателя на этапе конструирования рассчитывают угол чередования или измеряют его компонентом 340 средств измерения электромагнитных помех во время работы системы 300 привода двигателя, которым уменьшают электромагнитные помехи системы 300 привода двигателя.
В этом примере многофункциональный контроллер 110 двигателя имеет шесть различных режимов работы. Может быть осуществлено конфигурирование большего или меньшего режимов работы. Во время работы системы 200 привода двигателя, когда происходит изменение режима работы контроллера 110 двигателя, выбирают или определяют угол чередования (например, предварительно вычисленный или определяемый динамически устройством 320 управления углом чередования), который уменьшает электромагнитные помехи для конкретного режима работы, и используют этот угол для привода двигателя 140. Например, устройство 320 управления углом чередования определяет угол чередования для текущего режима и выдает угол чередования на средства 310 генерирования стробирующих импульсов/ШИМ-сигнала для управления контроллерами 110 двигателей. Как раскрыто в настоящем документе, угол чередования, который используется в системе 300 привода двигателя, может быть задан один раз (например, во время конструирования или при запуске) или динамически меняться во время работы. Например, перед переключением контроллера двигателя в другой режим может быть выполнено определение угла чередования.
Для уменьшения чистого шума электромагнитных помех также могут быть использованы активные подходы. Под активным подходом традиционно подразумевается использование схемы измерения электромагнитных помех и усилителя мощности, который вводит измеренный шум в виде электромагнитных помех посредством емкостной или индуктивной связи обратно в линию питания с противоположной фазой. Этот подход обеспечивает устранение шума в виде электромагнитных помех на низких частотах. Это ограничение по низким частотам обусловлено по меньшей мере частично неспособностью усилителя мощности покрыть широкий частотный спектр, лежащий в диапазоне от низких до высоких частот. Как правило, при использовании активного подхода к электромагнитным помехам продолжают использовать пассивный высокочастотный фильтр 120 электромагнитных помех. Как раскрыто выше, фильтр 120 электромагнитных помех, который выполнен для ослабления низких частот, тяжелее фильтра 120 электромагнитных помех, который выполнен для ослабления более высоких частот.
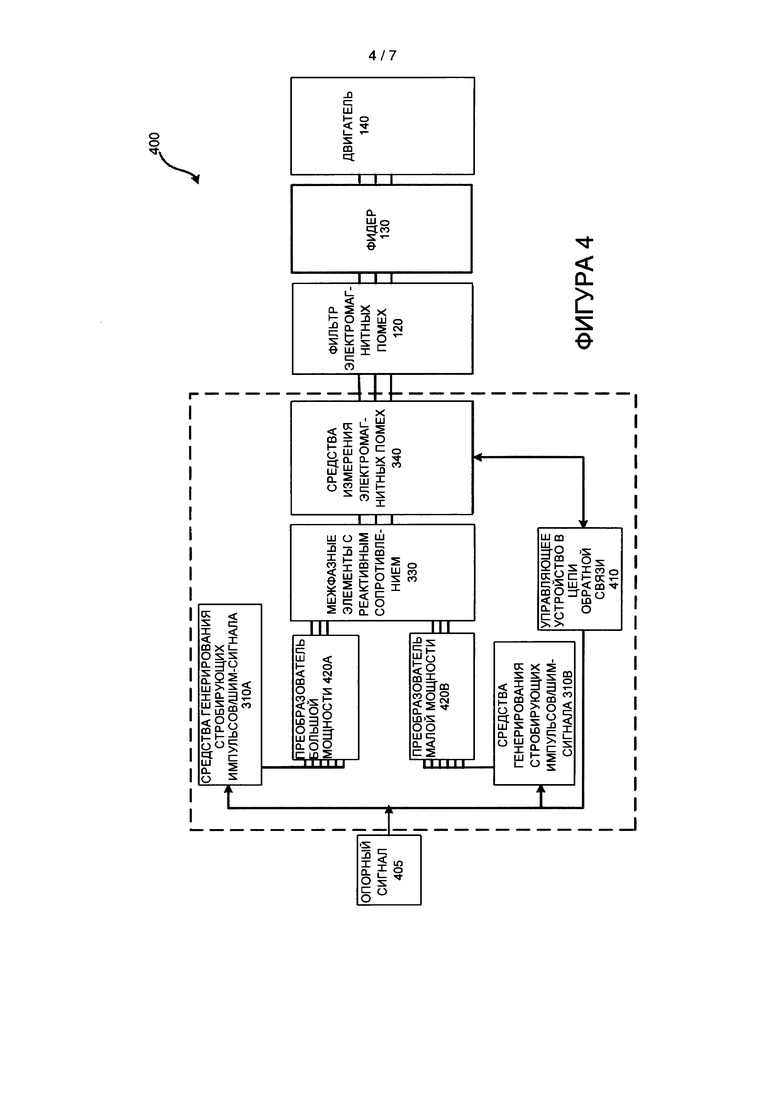
На ФИГ. 4 проиллюстрирована система 400 привода двигателя, выполненная на основе активного фильтра электромагнитных помех. Как проиллюстрировано на чертежах, система 400 привода двигателя, выполненная на основе активного фильтра электромагнитных помех, включает в себя опорный сигнал 405, средства 310А генерирования стробирующих импульсов/ШИМ-сигнала и средства 310В генерирования стробирующих импульсов/ШИМ-сигнала, преобразователь 420А большой мощности, преобразователь 420В малой мощности, управляющее устройство 410 в цепи обратной связи, межфазные элементы 330 с реактивным сопротивлением, средства 340 измерения электромагнитных помех, один или более фильтров 120 электромагнитных помех, один или более фидеров 130 и один или более двигателей 140.
Как проиллюстрировано на чертежах, система 400 привода двигателя, выполненная на основе активного фильтра электромагнитных помех, не включает в себя устройства подачи сигнала, которые обычно используются в системах, выполненных на основе активного фильтра электромагнитных помех. Как показано на чертежах, система 400 привода двигателя, выполненная на основе активного фильтра электромагнитных помех, включает в себя два преобразователя мощности (преобразователь 420А большой мощности и преобразователь 420В малой мощности), соединенных параллельно. В преобразователе 420А большой мощности могут использоваться биполярные транзисторы с изолированным затвором (IGBT), которые имеют относительно большое время включения и выключения и осуществляют переключение на относительно низких частотах (например, от 10 кГц до 20 кГц). В противоположность этому, в преобразователе 420В малой мощности могут использоваться устройства, выполненные с возможностью переключения на высоких частотах, такие как полевые транзисторы SiC MOSFET или GaN FET. Эти маломощные устройства могут осуществлять переключение на частотах, близких к диапазону электромагнитных помех (т.е. порядка сотен килогерц).
В одном примере параллельные преобразователи (например, преобразователь 420А большой мощности и преобразователь 420В малой мощности) генерируют одинаковый опорный волновой сигнал, однако опорный сигнал преобразователя 420В малой мощности и преобразователя, выполненного с возможностью работы на высоких частотах, также содержит сигнал обратной связи по электромагнитным помехам, который модифицирует его опорное значение для эффективного устранения чистого шума электромагнитных помех, генерируемого переключением преобразователя на низкой частоте. Поскольку преобразователь 420В малой мощности выполнен с возможностью переключения на более высоких частотах по сравнению с преобразователем 420А большой мощности, то преобразователь 420В малой мощности в этом отношении выполнен с возможностью воспроизведения содержимого электромагнитных помех относительно высоких частот. Управляющее устройство 410 в цепи обратной связи используется для оказания помощи при управлении работой средств 310 генерирования стробирующих импульсов/ШИМ-сигнала. Как проиллюстрировано на чертежах, фильтр 120 электромагнитных помех является пассивным высокочастотным фильтром небольшого веса.
Как проиллюстрировано в данном случае, множество различных механизмов может быть использовано для уменьшения веса системы привода двигателя, которая также уменьшает электромагнитные помехи. Таким образом, один или более различных механизмов могут быть использованы или скомбинированы, чтобы создать или выполнить систему привода двигателя, которая позволяет уменьшить вес системы. Уменьшение электромагнитных помех и конструкция фильтра электромагнитных помех для преобразователя энергии, описанные в настоящем документе, могут способствовать минимизации и оптимизации веса системы привода двигателя, используемой в аэрокосмической промышленности, или при решении других задач.
На ФИГ. 5А и 5В описана приведенная в качестве иллюстрации последовательность операций 500 конструирования системы привода двигателя, которая уменьшает электромагнитные помехи. Следует иметь в виду, что может быть выполнено больше или меньше операций, чем показано на чертежах и описано в настоящем документе. Эти операции также могут быть выполнены в порядке, отличающемся от порядка, описанного в настоящем документе. В некоторых примерах некоторые из операций могут не выполняться.
Выполнение последовательности операций 500 может быть начато с операции 510, как показано на ФИГ. 5А, во время которой определяют архитектуру системы привода двигателя. Как раскрыто выше, архитектура системы привода двигателя может включать в себя различное оборудование преобразования энергии и контроллеры двигателя в зависимости от конкретной области применения системы привода двигателя. В общем случае, архитектура системы привода двигателя определяет, сколько используется контроллеров 110 двигателей, сколько режимов имеет каждый контроллер 110 двигателя, сколько двигателей 140 находится в системе привода двигателя и т.п. Определенная таким образом архитектура системы привода двигателя может таким образом определять места размещения контроллеров 110 двигателей, длины и типы фидеров 130, параметры двигателей 140 и т.п. В одном примере определяемая архитектура системы привода двигателя предназначена для самолета. Однако архитектура системы привода двигателя, для которой происходит определение, может быть предназначена для применения другого типа. Например, архитектура системы привода двигателя может быть предназначена для спутника, лодки, поезда, наземной системы, космической системы и т.п.
От операции 510 выполнение последовательности 500 может быть продолжено переходом к операции 515, во время которой может быть произведено определение одной или более точки резонанса. Как раскрыто выше, может быть произведено определение полного сопротивления фидеров 130 и двигателей 140 с учетом определенной архитектуры системы привода двигателя и использование определенных таким образом точек резонанса.
От операции 515 выполнение последовательности 500 может быть продолжено переходом к операции 520, во время которой конструируют исходную систему привода двигателя. Например, может быть выполнен механизм широтно-импульсной модуляции ШИМ (PWM), а также может быть определено усиление в результате ввода фильтров электромагнитных помех и может быть определена частота излома. Также может быть определены требования в отношении электромагнитных помех к полному сопротивлению фидеров и двигателей, которые приводят к устранению, уменьшению или сдвигу точек резонанса для уменьшения или минимизации веса одного или более фильтров 120 электромагнитных помех, которые используются в системе привода двигателя.
После операции 520 согласно последовательность 500 можно перейти к выполнению операции 525, во время которой используют параметры полного сопротивления фидеров и двигателей при создании или конфигурировании фидеров 130 и/или двигателей 140. В некоторых примерах параметры полного сопротивления фидеров и двигателей сообщают одному или более поставщикам фидеров 130, контроллеров 110 двигателей и двигателей 140. В некоторых случаях эти предоставленные параметры полного сопротивления могут быть изменены поставщиками, конструктором или каким-либо имеющим соответствующие полномочия пользователем (например, представленные параметры полного сопротивления недостижимы). Эти параметры полного сопротивления фидеров и двигателей используются (например, поставщиком) при создании или конфигурировании фидеров 130 и двигателей 140 таким образом, что по меньшей мере одна точка резонанса была смещена к более высокому значению частоты.
От операции 525 алгоритм 500 осуществляет переход к операции 530, во время которой может быть произведена оптимизация одного или более фильтров 120 электромагнитных помех. Например, как раскрыто выше, фильтр 120 электромагнитных помех может быть оптимизирован посредством включения экранирования или добавления пассивных компонентов (например, ферритовых шайб) для фидера 130. Оптимизация может быть выбрана с учетом того, что она приводит к уменьшению веса фильтра 120 электромагнитных помех. Например, в одном примере экранирование фидера 130 может быть легким, а еще в одном примере добавление легких пассивных компонентов, содержащих небольшой конденсатор или ферритовую шайбу вдоль фидера 130, может привести к облегчению системы привода двигателя. В другом примере может быть определено не использовать для фидеров 130 ни экранирования, ни легких пассивных компонентов для фидеров 130.
После операции 530 согласно последовательности 500 можно перейти к выполнению операции 535 принятия решения, во время которой принимают решение на предмет соответствия фильтра 120 электромагнитных помех и/или системы привода двигателя требованиям к весу, приведенным в технических условиях. При соответствии требованиям к весу, согласно последовательности 500 можно перейти к конечной операции. При несоответствии требованиям к весу согласно последовательности операций 500 можно перейти к выполнению операции 540 и к операции 545.
Во время операции 540 может быть выбрано управляющее устройство управления питанием, работающее с чередованием, и может быть рассчитано (например, с использованием моделирования) или измерено (например, на прототипе) комбинированное полное сопротивление фидера и двигателя в диапазоне частот кондуктивных электромагнитных помех для определения точек резонанса. Также может быть осуществлена подстройка угла чередования для уменьшения шума в относящихся к полному сопротивлению точках резонанса фидеров/двигателей. Как раскрыто выше, угол чередования может регулироваться динамически посредством устройства управления углом чередования (например, при использовании многофункционального контроллера двигателя).
Во время операции 545 может быть выбран механизм активного устранения шума в виде электромагнитных помех. Как раскрыто выше, механизм активного устранения электромагнитных помех может включать в себя подачу шумового сигнала или параллельное включение преобразователей в зависимости от того, какой механизм имеет более легкую конструкцию. Например, если оказывается, что использование механизма подачи шумового сигнала приводит к облегчению конструкции, может быть выбрано активное устранение электромагнитных помех посредством подачи несинфазного шумового сигнала. Если же механизм подачи шумового сигнала оказывается тяжелее параллельно включенных преобразователей, может быть выбрано активное устранение электромагнитных помех посредством параллельного включения преобразователей.
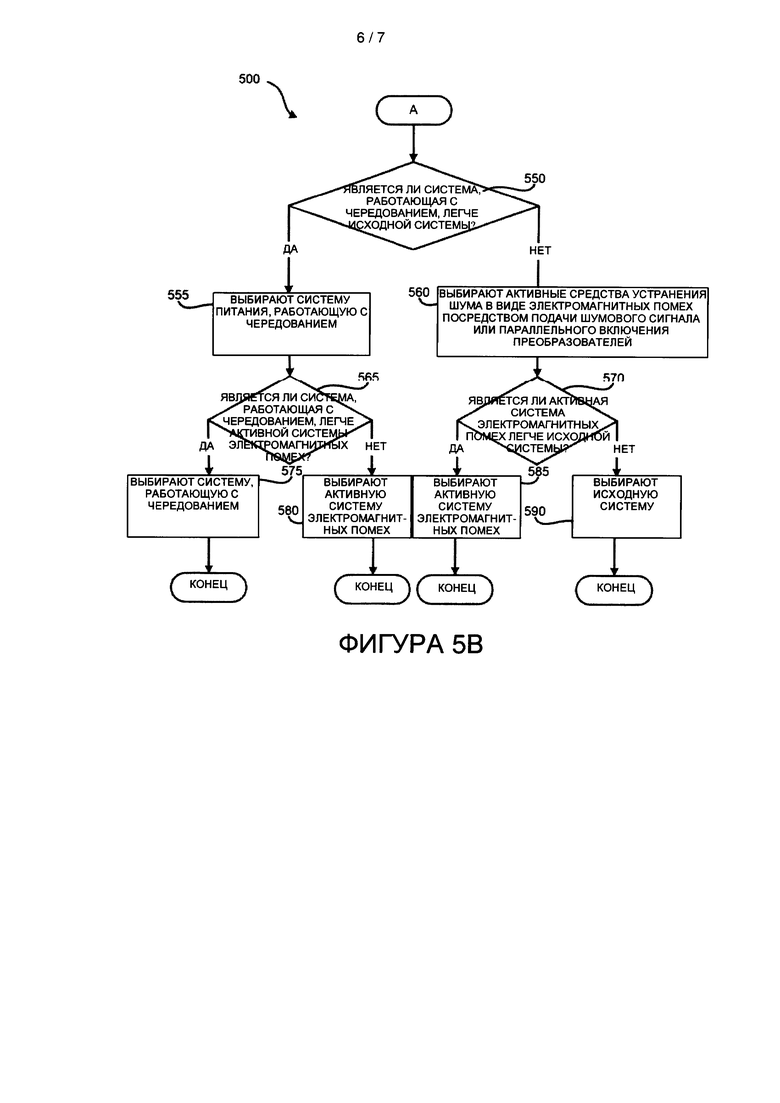
После выполнения операции 540 и операции 545 согласно последовательности 500 можно перейти к выполнению операции 550 принятия решения, как проиллюстрировано на ФИГ. 5В, во время которой определяют, является ли система, работающая с чередованием, легче исходной системы, как установлено при операции 520. Если система, работающая с чередованием, легче исходной системы, согласно последовательности 500 можно перейти к выполнению операции 555. Если система, работающая с чередованием, не легче исходной системы, согласно последовательности 500 можно перейти к выполнению операции 560.
Во время операции 555 выбирают систему привода двигателя, работающую с чередованием. После выполнения операции 555 согласно последовательности 500 можно перейти к выполнению операции 565 принятия решения, во время которой определяют, является ли система, работающая с чередованием, легче активной системы электромагнитных помех. Если система, работающая с чередованием, легче активной системы электромагнитных помех, согласно последовательности 500 можно перейти к выполнению операции 575, во время которой может быть выбрана указанная система. Если система, работающая с чередованием, не легче активной системы электромагнитных помех, согласно последовательности 500 может быть осуществлен переход к операции 580, во время которой может быть выбрана активная система электромагнитных помех.
Во время операции 560 может быть выбрана активная система электромагнитных помех. После выполнения операции 560 согласно последовательности 500 можно перейти к выполнению операции 570 принятия решения, во время которой определяют, является ли активная система электромагнитных помех легче исходной системы. Если активная система электромагнитных помех легче исходной системы, согласно последовательности 500 можно перейти к операции 585, во время которой может быть выбрана активная система электромагнитных помех. Если активная система электромагнитных помех не легче исходной системы, согласно последовательности 500 можно перейти к операции 590, во время которой может быть выбрана исходная система. Затем согласно последовательности 500 можно перейти к конечной операции или выполнить возврат для выполнения других действий. Например, согласно последовательности 500 может быть осуществлен возврат к операции 510.
На ФИГ. 6 проиллюстрирован компьютер, содержащий аппаратные средства и программное обеспечение, на котором может быть произведен конструкторский расчет системы привода двигателя. Компьютер 600, показанный на ФИГ. 6, включает в себя один или более центральных процессоров (CPU) 602, системную память 604, включая оперативное запоминающее устройство (RAM) 606 и постоянное запоминающее устройство (ROM) 608 и системную шину 610, которая соединяет системную память 604 с центральным процессором CPU 602. В постоянном запоминающем устройстве (ROM) 608 может храниться базовая система ввода/вывода, содержащая алгоритмы, которая обеспечивает возможность передачи информации между элементами внутри компьютера 600, например во время пуска.
Центральные процессоры 602 могут являться стандартными программируемыми процессорами, которые выполняют арифметические и логические операции для работы компьютера 600, например алгоритм 500, описанный выше. Центральные процессоры 602 могут выполнять операции по переходу от одного дискретного физического состояния в другое посредством манипуляции с переключательными элементами, которыми различают эти состояния и изменяют их. Переключательные элементы в общем случае могут включать в себя электронные схемы, которые сохраняют одно из двух двоичных состояний, такие как триггеры, и электронные схемы, которые обеспечивают выходное состояние на основании логической комбинации состояний одного или более других переключательных элементов, таких как логические вентили или затворы. Эти основные переключательные элементы могут комбинироваться для создания более сложных логических схем, включая регистры, сумматоры-вычитатели, арифметические логические устройства, модули для выполнения операций с плавающей точкой и т.п.
Компьютер 600 также может включать в себя запоминающее устройство 612 большой емкости. Запоминающее устройство большой емкости может представлять собой оптический диск, магнитное запоминающее устройство или твердотельное устройство хранения. Запоминающее устройство 612 большой емкости может быть выполнено с возможностью хранения одной или более команд для управления устройством, управляющим разрядом топливных элементов. В другой конфигурации оперативное запоминающее устройство (RAM) 606, постоянное запоминающее устройство (ROM) 608 и запоминающее устройство 612 большой емкости могут быть выполнены с возможностью хранения в них, либо по отдельности, либо в различных комбинациях, команд для управления устройством, управляющим разрядом топливных элементов.
Компьютер 600 может хранить программы и данные в запоминающем устройстве 612 большой емкости посредством преобразования физического состояния запоминающего устройства 612 большой емкости для отображения сохраненной информации. Конкретное преобразование физического состояния может зависеть от различных факторов в различных вариантах реализации этого изобретения. Примеры таких факторов могут включать в себя, но без ограничения, технологии, используемые при реализации запоминающего устройства 612 большой емкости, которое может быть первичным или вторичным запоминающим устройством и т.п.
Например, компьютер 600 может хранить информацию в запоминающее устройство 612 большой емкости путем выдачи команд через контроллер памяти, чтобы изменять магнитные характеристики определенного места в устройстве привода магнитного диска, отражающих или преломляющих характеристик определенного места в оптическом устройстве хранения или электрические характеристики конкретного конденсатора, транзистора или другого компонента в твердотельном запоминающем устройстве. Другие преобразования физических носителей возможны без отхода от объема и сущности настоящего описания, при этом предыдущие примеры предоставлены только для облегчения этого описания. Компьютер 600 может также считывать информацию из запоминающего устройства 612 большой емкости посредством распознавания физических состояний или характеристик одного или более определенных мест в запоминающем устройства 612 большой емкости.
Оперативное запоминающее устройство (RAM) 606, постоянное запоминающее устройство (ROM) 608 или запоминающее устройство 612 большой емкости может быть выполнено в виде компьютерочитаемых носителей для хранения данных. Различные аспекты настоящего изобретения могут быть сохранены на различных типах компьютерочитаемых носителей для хранения данных, таких как, без ограничения, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память или другие решения на основе технологии твердотельной памяти, CD-ROM, цифровые универсальные диски (DVD), HD-DVD, BLU-RAY или другое оптические запоминающее устройство, магнитные кассеты, магнитная лента, магнитный диск хранения или другие магнитные устройства для хранения или любой другой носитель, который может быть использован для хранения необходимой информации и доступ к которому может быть осуществлен компьютером 600. Следует отметить, что при интерпретации формулы изобретения в свете настоящего раскрытия компьютерочитаемый носитель для хранения данных не содержит энергии ни в волновой, ни в сигнальной форме.
Компьютер 600 также может включать в себя управляющее устройство 616 ввода/вывода для приема и обработки входных сигналов от множества устройств, включая клавиатуру, компьютерную мышь или электронный стилус. Аналогично управляющее устройство 616 ввода/вывода может выдавать выходной сигнал на дисплейный экран, принтер или устройство вывода другого типа. Один или более вариантов реализации могут включать в себя компьютерочитаемый носитель для хранения данных, выполненный таким образом, что при считывании компьютерным устройством, имеющим необходимую конфигурацию, могут быть получены команды для выполнения операций, относящихся к выполнению фильтра электромагнитных помех для смещенной точки резонанса.
Кроме того, изобретение включает варианты реализации согласно следующим пунктам:
Пункт 1. Способ конструирования системы питания привода двигателя, содержащей оборудование преобразования энергии в импульсном режиме, согласно которому:
определяют систему привода двигателя, которая включает в себя контроллер двигателя и фидер, соединяющий контроллер двигателя с электрическим двигателем;
определяют точку резонанса для системы привода двигателя;
смещают точку резонанса для системы привода двигателя к смещенной точке резонанса, которая имеет более высокую частоту по сравнению с частотой, связанной с точкой резонанса; и
конструируют для смещенной точки резонанса фильтр электромагнитных помех, который содержится в системе привода двигателя.
Пункт 2. Способ по пункту 1, согласно которому смещение точки резонанса включает использование параметра полного сопротивления контроллера двигателя, фидера или электрического двигателя или комбинации указанного для смещения точки резонанса.
Пункт 3. Способ по пункту 1, согласно которому дополнительно осуществляют оптимизацию фильтра электромагнитных помех посредством использования экранирования для фидера или добавления легких пассивных компонентов вдоль фидера или осуществляют комбинацию указанного.
Пункт 4. Способ по пункту 1, дополнительно включающий выбор контроллера питания, работающего с чередованием, или механизма активного устранения шума в виде электромагнитных помех при определении, что вес системы привода двигателя не соответствует конкретным параметрам, при этом контроллер питания включает в себя фильтр электромагнитных помех, выполненный с учетом смещенной точки резонанса.
Пункт 5. Способ по пункту 1, кроме того, включающий изменение угла чередования, который уменьшает гармоники, причем угол чередования используется в системе привода двигателя, которая содержит множество контроллеров двигателей.
Пункт 6. Способ по пункту 1, кроме того, включающий выбор механизма активного устранения шума в виде электромагнитных помех для системы привода двигателя с использованием веса системы привода двигателя.
Пункт 7. Способ по пункту 6, согласно которому механизмом активного устранения шума в виде электромагнитных помех выполняют подачу шумового сигнала, параллельное включение преобразователей или комбинацию указанного.
Пункт 8. Способ по пункту 1, согласно которому определение точки резонанса включает измерение комбинированного полного сопротивления фидера и электрического двигателя в диапазоне частот кондуктивных электромагнитных помех.
Пункт 9. Способ по пункту 1, кроме того, включающий динамическое определение угла чередования и использование устройства управления углом чередования для регулировки угла чередования контроллера двигателя.
Пункт 10. Система, содержащая:
один или более контроллеров двигателя;
один или более фидеров, соединенных с указанными одним или более контроллерами двигателя и сконструированных с использованием такого параметра полного сопротивления, при котором происходит смещение точки резонанса комбинированного полного сопротивления указанных одного или более фидеров и одного или более электрических двигателей, которые соединены с указанными одним или более фидерами, к смещенной точке резонанса, имеющей более высокую частоту по сравнению с частотой указанной точки резонанса; и
один или более фильтров электромагнитных помех (EMI), которые соединены с указанным одним или более контроллерами двигателей, причем фильтры электромагнитных помех выполнены с учетом для смещенной точки резонанса.
Пункт 11. Система по пункту 10, в которой указанные один или более фидеров содержат средства экранирования, легкие пассивные компоненты или их комбинацию, размещенные вдоль участка длины одного или более фидеров.
Пункт 12. Система по пункту 10, в которой по меньшей мере одно устройство из указанных одного или более контроллеров двигателей является многофункциональным контроллером двигателя.
Пункт 13. Система по пункту 10, кроме того, содержащая устройство управления углом чередования, соединенное с указанными одним или более контроллерами двигателей для регулировки угла чередования.
Пункт 14. Система по пункту 13, в которой устройство управления углом чередования осуществляет регулировку угла чередования при изменении режимов контроллера двигателя.
Пункт 15. Система по пункту 10, в которой один или более контроллеров, одно или более фидеров, один или более электрических двигателей и один или более фильтров электромагнитных помех размещены в самолете.
Пункт 16. Компьютерочитаемый носитель для хранения данных, содержащий исполняемые компьютером команды, сохраненные на нем, которые при исполнении компьютером, приводят к выполнению компьютером следующих операций:
осуществление доступа к параметрам системы привода двигателя, которые включают в себя модель контроллера двигателя и модель фидера;
определение точки резонанса для системы привода двигателя;
определение параметров полного сопротивления, чтобы осуществить смещение точки резонанса для системы привода двигателя к смещенной точке резонанса, имеющей более высокую частоту по сравнению с частотой указанной точки резонанса; и
выполнение конструкторского расчета фильтра электромагнитных помех с учетом смещенной точки резонанса.
Пункт 17. Компьютерочитаемый носитель для хранения данных по пункту 16, в котором система привода двигателя предназначена для самолета.
Пункт 18. Компьютерочитаемый носитель для хранения данных по пункту 16, в котором команды вынуждают компьютер определять угол чередования, который используется в системе привода двигателя, который включает в себя множество контроллеров двигателем.
Пункт 19. Компьютерочитаемый носитель для хранения данных по пункту 16, в котором команды вынуждают компьютер определять использование средств активного устранения шума в виде электромагнитных помех в системе привода двигателя, которые выполняют подачу шумового сигнала, параллельное включение преобразователей или их комбинацию.
Пункт 20. Компьютерочитаемый носитель для хранения данных по пункту 16, в котором команды вынуждают компьютер определять комбинированное полное сопротивление фидера и двигателя в диапазоне частот кондуктивных электромагнитных помех и определять точки резонанса.
При использовании в настоящем документе выражение "по меньшей мере одно из следующего", употребляемое со списком объектов, означает, что могут быть использованы различные комбинации из одного или более приведенных в списке объектов и только один из объектов, указанных в списке, может быть необходим. Например, выражение "по меньшей мере одно из следующего: объект А, объект В и объект С" может включать, без ограничения, объект А или объект А и объект В. Этот пример также может включать объект А, объект В и объект С или объект В и объект С. Конечно, могут присутствовать любые комбинации этих объектов. В других примерах выражение "по меньшей мере одно из следующего" может представлять собой, например, без ограничения, два объекта А, один объект В и десять объектов С; четыре объекта В и семь объектов С или какие-либо иные подходящие комбинации. Объект может представлять собой конкретный объект, вещь или категорию. Другими словами, "по меньшей мере одно из этого" означает, что любое сочетание элементов и их количество из этого списка может быть использовано, но не все из пунктов списка должны присутствовать.
Объект, описанный выше, приведен только в качестве иллюстративного примера и не должен рассматриваться в качестве ограничения. Могут быть выполнены различные модификации и изменения объекта, описанного в настоящем документе, не следуя примерным вариантам реализации и применения, показанным и описанным, и без выхода за пределы сущности и объема настоящего изобретения, который изложен в последующей формуле изобретения.


Использование: в области электротехники. Технический результат – снижение веса системы привода двигателя. Согласно изобретению определяют точку резонанса для системы привода двигателя, смещают точку резонанса к смещенной точке резонанса, которая имеет более высокую частоту по сравнению с частотой, связанной с точкой резонанса, посредством изменения полного сопротивления по меньшей мере фидера или двигателя. Конструируют фильтр электромагнитных помех для смещенной точки резонанса, которая имеет более высокую частоту, при этом фильтр электромагнитных помех для смещенной точки резонанса легче фильтра электромагнитных помех, выполненного для точки резонанса перед ее смещением. Включают фильтр в систему привода двигателя. 3 н. и 17 з.п. ф-лы, 7 ил.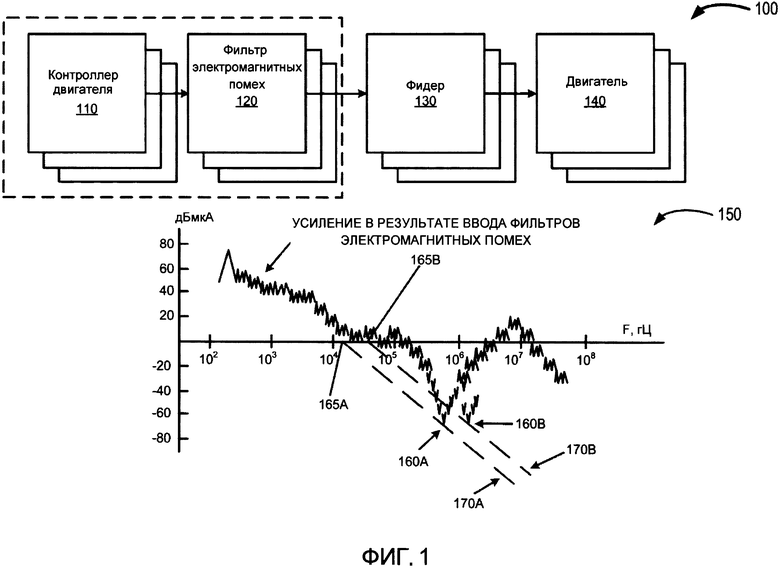
1. Способ конструирования системы питания привода двигателя, содержащей оборудование преобразования энергии в импульсном режиме, согласно которому:
определяют систему привода двигателя, которая включает в себя контроллер двигателя и фидер, соединяющий контроллер двигателя с электрическим двигателем;
определяют точку резонанса для системы привода двигателя;
смещают точку резонанса для системы привода двигателя к смещенной точке резонанса, которая имеет более высокую частоту по сравнению с частотой, связанной с точкой резонанса; и
конструируют фильтр электромагнитных помех для смещенной точки резонанса, который включают в систему привода двигателя.
2. Способ по п. 1, согласно которому смещение точки резонанса осуществляют с использованием параметра полного сопротивления контроллера двигателя, фидера или электрического двигателя или комбинации указанного.
3. Способ по п. 1, согласно которому дополнительно осуществляют снижение веса фильтра электромагнитных помех посредством использования экранирования для фидера или добавления легких пассивных компонентов вдоль фидера или осуществляют комбинацию указанного.
4. Способ по п. 1, дополнительно включающий выбор контроллера питания, работающего с чередованием, или механизма активного устранения шума в виде электромагнитных помех при определении, что вес системы привода двигателя не соответствует конкретным параметрам, при этом контроллер питания включает в себя фильтр электромагнитных помех, выполненный с учетом смещенной точки резонанса.
5. Способ по п. 1, кроме того, включающий изменение угла чередования, который уменьшает гармоники, причем угол чередования используется в системе привода двигателя, которая содержит множество контроллеров двигателей.
6. Способ по п. 1, кроме того, включающий выбор механизма активного устранения шума в виде электромагнитных помех для системы привода двигателя для облегчения системы привода двигателя.
7. Способ по п. 6, согласно которому механизмом активного устранения шума в виде электромагнитных помех выполняют подачу шумового сигнала в виде электромагнитных помех в линию питания с противоположной фазой, параллельное включение преобразователей или комбинацию указанного.
8. Способ по п. 1, согласно которому определение точки резонанса включает измерение комбинированного полного сопротивления фидера и электрического двигателя в диапазоне частот кондуктивных электромагнитных помех.
9. Способ по п. 1, кроме того, включающий динамическое определение угла чередования и использование устройства управления углом чередования для регулировки угла чередования контроллера двигателя.
10. Система питания привода двигателя, содержащая:
один или более контроллеров двигателя;
один или более фидеров, соединенных с указанными одним или более контроллерами двигателя и сконструированных с использованием такого параметра полного сопротивления, при котором происходит смещение точки резонанса комбинированного полного сопротивления указанных одного или более фидеров и одного или более электрических двигателей, которые соединены с указанными одним или более фидерами, к смещенной точке резонанса, имеющей более высокую частоту по сравнению с частотой указанной точки резонанса; и
один или более фильтров электромагнитных помех, которые соединены с указанным одним или более контроллерами двигателей, причем фильтры электромагнитных помех выполнены с учетом смещенной точки резонанса.
11. Система по п. 10, в которой указанные один или более фидеров содержат средства экранирования, легкие пассивные компоненты или их комбинацию, добавленные вдоль участка длины указанных одного или более фидеров.
12. Система по п. 10, в которой по меньшей мере один из указанных одного или более контроллеров двигателей является многофункциональным контроллером двигателя.
13. Система по п. 10, кроме того, содержащая устройство управления углом чередования, соединенное с указанными одним или более контроллерами двигателей для регулировки угла чередования.
14. Система по п. 13, в которой устройство управления углом чередования осуществляет регулировку угла чередования в качестве реакции на изменение режимов контроллера двигателя.
15. Система по п. 10, в которой один или более контроллеров, один или более фидеров, один или более электрических двигателей и один или более фильтров электромагнитных помех размещены в самолете.
16. Компьютерочитаемый носитель для хранения данных, содержащий исполняемые компьютером команды, сохраненные на нем, которые при исполнении компьютером приводят к выполнению компьютером следующих операций:
осуществление доступа к параметрам системы привода двигателя, которые включают в себя модель контроллера двигателя и модель фидера;
определение точки резонанса для системы привода двигателя;
определение параметров полного сопротивления, чтобы осуществить смещение точки резонанса для системы привода двигателя к смещенной точке резонанса, имеющей более высокую частоту по сравнению с частотой указанной точки резонанса; и
конструирование фильтра электромагнитных помех с учетом смещенной точки резонанса.
17. Компьютерочитаемый носитель для хранения данных по п. 16, в котором система привода двигателя предназначена для самолета.
18. Компьютерочитаемый носитель для хранения данных по п. 16, в котором команды приводят к выполнению компьютером операции определения угла чередования, который используется в системе привода двигателя, которая включает в себя множество контроллеров двигателей.
19. Компьютерочитаемый носитель для хранения данных по п. 16, в котором команды приводят к выполнению компьютером операции определения использования механизма активного устранения шума в виде электромагнитных помех в системе привода двигателя, которые выполняют подачу шумового сигнала в виде электромагнитных помех в линию питания с противоположной фазой, параллельное включение преобразователей или их комбинацию.
20. Компьютерочитаемый носитель для хранения данных по п. 16, в котором команды приводят к выполнению компьютером операции определения комбинированного полного сопротивления фидера и двигателя в диапазоне частот кондуктивных электромагнитных помех и определения точек резонанса.
| US 5483136A, 09.01.1996 | |||
| US 6697270B1, 24.02.2004 | |||
| WO1993020523A1, 14.10.1993 | |||
| СИСТЕМА И СПОСОБ ДЛЯ ПОДАВЛЕНИЯ РЕЗОНАНСА | 2009 |
|
RU2508589C2 |

