Область техники.
Изобретение относится к области навигации, конкретно к способам навигационных астрономических измерений координат местоположения подвижного объекта (ПО) и устройствам для его реализации.
Уровень техники.
Известны способы и устройства навигационных астрономических измерений координат местоположения ПО /1-4/.
Наиболее близким из известных по назначению и технической сущности является способ астрономических навигационных измерений /1/, основанный на стабилизации астротелескопа относительно местной вертикали, пеленгации навигационной звезды, измерений курсового угла звезды и вычисления курса ПО.
Недостатками данного способа и устройства является низкая точность измерения координат местоположения ПО из-за низкой точности и информативности пеленгации астроориентиров (звезд).
Задачей и техническим результатом настоящего изобретения является повышение точности навигационных измерений координат местоположения ПО.
Сущность изобретения.
Решение поставленной задачи и достижение заявленного технического результата обеспечивается тем, что способ навигационных астрономических измерений координат местоположения подвижного объекта основан на стабилизации астротелескопа, установленного на подвижном объекте относительно местной вертикали, пеленгации астротелескопом не менее трех источников навигации (астроориентиров), измерении их текущих угловых координат относительно текущей местной вертикали астротелескопа ПО и вычислении координат местоположения ПО по измеренным значениям зенитных углов источников навигации.
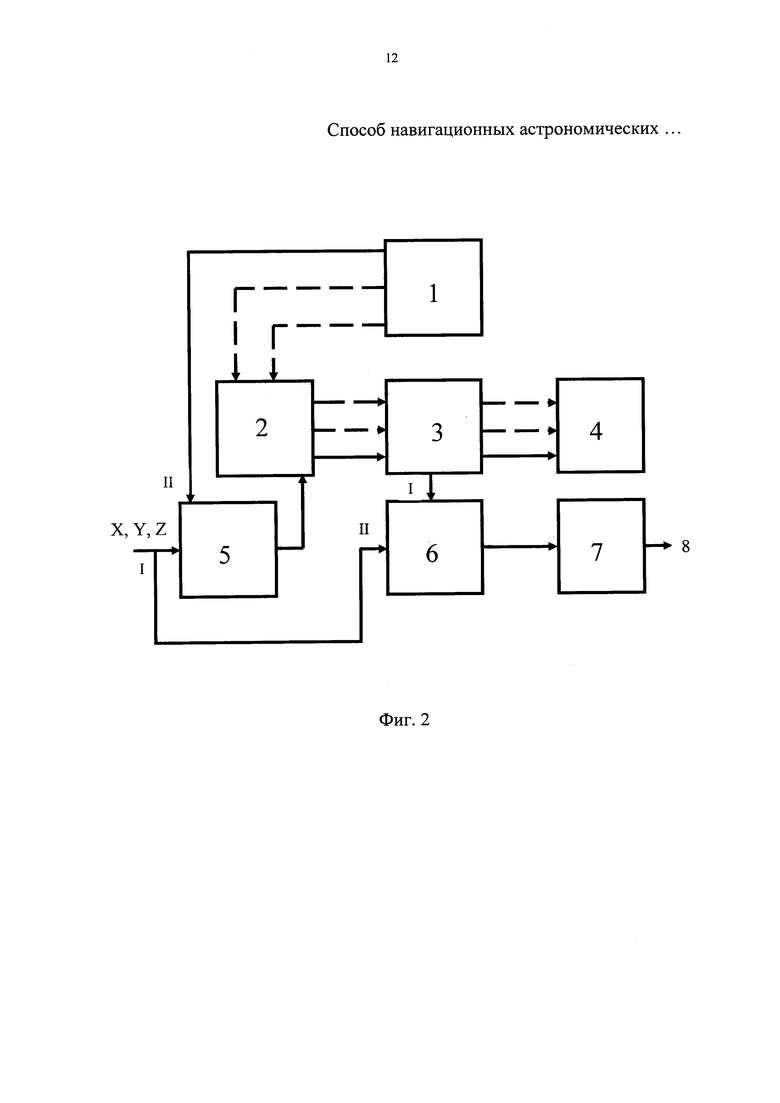
Согласно изобретению в качестве источников навигации для ПО используют искусственные спутники земли (ИСЗ) с известными текущими координатами Xc, Yc, Zc, производят их автосопровождение астротелескопом ПО, измеряют текущие зенитные углы bc каждого ИСЗ относительно нормали гиростабилизированной платформы ПО, переводят измеренные значения зенитных углов bc каждого ИСЗ к центральному зенитному углу b с вершиной в центре Земли и вычисляют координаты ПО согласно выражениям вида:


где i - порядковый номер ИСЗ;
I - количество наблюдаемых ИСЗ, причем I≥2;
R=X+Y+Z - расстояние от центра Земли до ПО в прямоугольной системе координат;
Rc=Хс+Yc+Zc - расстояние от центра Земли до ИСЗ в прямоугольной системе координат;
Ro=(Xc-X)+(Yc-Y)+(Zc-Z)-расстояние от ПО до ИСЗ в прямоугольной системе координат.
Вывод выражений (1) и (2) осуществляется следующим образом. Согласно фиг. 1 расстояние от центра Земли до ИСЗ можно записать:


Приравнивая правые части выражений 1 и 2, получим:

После преобразования (3) выражение для определения зенитного угла bc примет вид:

Из 4 выражение искомой величины R примет вид:



Пересчет прямоугольных координат X, Y, Z в географические F, L, Н возможен путем решения следующей системы уравнений:
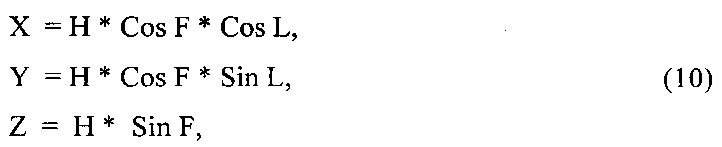
В соответствии с теоремой косинусов зенитный угол (b) может быть определен согласно фиг. 1 из следующего выражения:

Из 9 следует:

где OK - расстояние от центра Земли до второго ИСЗ;
F - широта ПО - ЛА в географической системе координат;
L - долгота ПО - ЛА в географической системе координат;
Н - высота полета ПО - ЛА над поверхностью Земли в географической системе координат.
Новыми признаками, обладающими существенными отличиями, являются:
- использование в качестве астроориентира искусственного спутника Земли (ИСЗ);
- приведение измеренного зенитного угла к центральному зенитному углу;
- новые аналитические зависимости вычисления координат подвижного объекта;
- новая схема устройства навигационных астрономических измерений.
Данные признаки обладают существенными отличиями, так как среди известных технических решений предлагаемый способ не обнаружен.
Применение всех новых признаков позволяет повысить точность астрономических навигационных измерений или сократить время пеленгации астроориентира для достижения требуемой точности за счет того, что в качестве астроориентира вместо навигационной звезды используется подвижный объект - ИСЗ, координаты которого известны с высокой точностью.
Указанное утверждение основано на известном факте, что угловая скорость низко- и среднеорбитальных ИСЗ значительно больше углового перемещения звезды, а информативность измерения тем выше, чем больше угловая скорость линии визирования, следовательно, информативность ИСЗ как астроориентира значительно выше, чем навигационной звезды.
Также известно, что точность навигационных измерений и время обработки информации для достижения требуемой точности определяются информативностью измерений, т.е. наблюдаемостью измерений, и она тем выше, чем выше информативность [3].
Описание чертежей
На фиг. 1 изображена схема пеленгации астроориентиров, поясняющая предложенный способ.
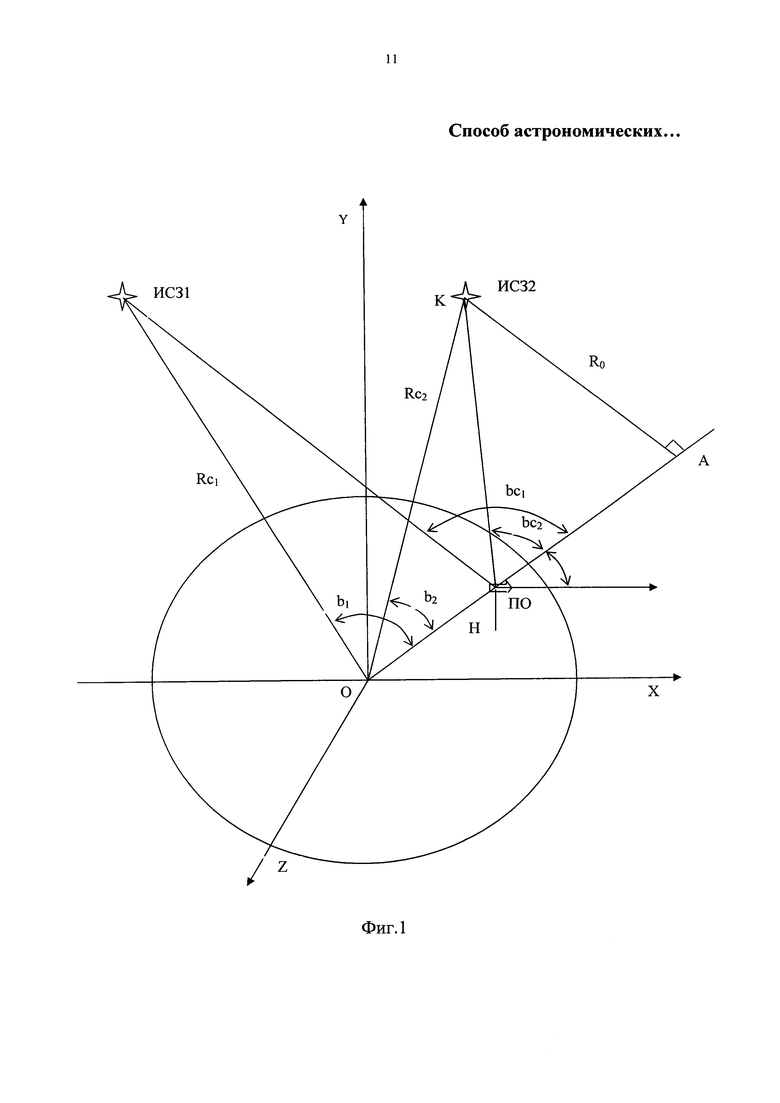
На фиг. 2 - блок-схема устройства для реализации способа навигационных астрономических определений.
Сущность предлагаемого способа навигационных астрономических измерений координат местоположения подвижного объекта поясняется с помощью устройства для его реализации и его работе по предлагаемому способу.
Описание устройства, реализующего предлагаемый способ.
Устройство для реализации предлагаемого способа навигационных астрономических измерений координат местоположения подвижного объекта содержит гиростабилизированную платформу 1. Механический выход платформы 1 через систему наведения 2 и следящую систему 3 соединен с механическим входом астротелескопа 4. Электрический вход астротелескопа 4 через следящую систему 3 и систему наведения 2 связан с выходом блока 5 наведения. Первый вход блока 5 связан с внешним источником информации, а второй - с электрическим выходом гиростабилизированной платформы 1. Электрический выход следящей системы 3 связан с первым входом блока 6 вычисления углов, второй вход которого связан с внешним источником информации. Выход блока 6 вычисления углов связан с входом блока 7 вычисления координат, выход которого является выходом 8 предлагаемого устройства.
Работа устройства навигационных астрономических измерений координат местоположения подвижного объекта по предлагаемому способу.
Работа устройства навигационных астрономических измерений координат местоположения подвижного объекта по предлагаемому способу состоит в следующем.
С помощью гиростабилизированной платформы 1 через систему наведения 2 и следящую систему 3 осуществляется стабилизация астротелескопа 4 относительно местной вертикали. В блоке 5 наведения по дополнительной информации о координатах ИСЗ Хс, Yc, Zc и углам ориентации ЛА от гиростабилизированной платформы 1 вычисляются углы наведения bci на ИСЗ, которые поступают в систему наведения 2. Система наведения 2 через следящую систему 3 разворачивает астротелескоп 4 по линии визирования на ИСЗ, который захватывает спутник и с помощью следящей системы 3 сопровождает его. При этом происходит измерение зенитного угла bc ИСЗ, относительно местной вертикали, информация о котором поступает в блок 6 вычисления углов. В блоке 6 вычисления углов осуществляется приведение измеренного зенитного угла bc к центральному зенитному углу b с вершиной в центре Земли. Аналогичным образом производится пеленгация еще одного или двух ИСЗ, в зависимости от необходимости определения двух или трех координат местоположения и измерения их зенитных углов. Информация о зенитных углах bc, и центральных зенитных углах bi i-го ИСЗ поступает в блок 7 вычисления координат, в котором осуществляется определение координат местоположения (X, Y, Z) ПО - ЛА согласно указанных выше выражений (1 и 2).
Ввиду того, что расстояние от ПО - ЛА до ИСЗ значительно меньше расстояния от ПО - ЛА до звезд, поэтому угловая скорость линии визирования ИСЗ выше, что, в свою очередь, повышает информативность и соответственно точность измерений.
Промышленная применимость
Применение предложенного изобретения позволяет повысить точность навигационных астрономических измерений координат местоположения ПО - ЛА за счет увеличения информативности измерений, выполняемых по ПО - ИСЗ. Достоверность повышения точности предлагаемым способом подтверждается указанными выше известными фактами по процессу пеленгации подвижного объекта в сравнении с неподвижным и теорией информативности измерений. Кроме того, авторами проведены сравнительные исследования методом математического моделирования способа изложенного в прототипе и предлагаемого способа при одних и тех же начальных ошибках измерения и условиях. В результате получено, что для ИСЗ с периодом обращения Т=120 мин предложенный способ позволяет повысить точность определения координат ПО - ЛА в 1,9-2 раза, а также в 2-2,5 раза уменьшить время пеленгации для достижения требуемой точности (1,85 км).
Кроме того, данный способ позволяет сократить время пеленгации астроориентира для достижения требуемой точности.
Источники информации
1. И.И. Помыкаев, В.П. Селезнев, Д.А. Дмитроченко. Навигационные приборы и системы. - М.: Машиностроение, 1983, с. 201.
2. В.И. Кузнецов, Т.В. Данилова, Д.М. Косулин. Способ автономной навигации и ориентации космических аппаратов на основе виртуальных измерений зенитных расстояний звезд. Патент №2010144278.
3. В.В. Малышев, М.Н. Красильников, В.И. Карлов. Оптимизация наблюдения и управления летательных аппаратов. - М.: Машиностроение, 1989, 311 с.
4. Авиационные приборы и навигационные системы / Под ред. О.А. Бабича. - М.: ВВИА им. Н. Е. Жуковского.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОСМИЧЕСКОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378617C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2247945C1 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ В ОКЕАНЕ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2007 |
|
RU2348009C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2021 |
|
RU2776096C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ | 1990 |
|
RU2120108C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2348011C1 |
| Система определения уклонений отвесной линии | 2019 |
|
RU2699907C1 |
Изобретение относится к области навигационного приборостроения и может найти применение для определения координат местоположения подвижного объекта, например летательного аппарата (ЛА). Технический результат – повышение точности. Для этого в качестве источников подвижных объектов используют искусственные спутники Земли (ИСЗ). При этом способ включает измерение зенитных углов пеленгуемых ИСЗ, приведение измеренного зенитного угла к центральному зенитному углу, вычисление по измеренному и приведенному углу и координатам ИСЗ координат местоположения подвижного объекта. Предлагаемые способ и устройство позволяют повысить точность определения координат подвижного объекта - ЛА в 1,9-2 раза, а также в 2-2,5 раза уменьшить время пеленгации для достижения требуемой точности (1,85 км). 2 н.п. ф-лы, 2 ил.
1. Способ навигационных астрономических измерений координат местоположения подвижного объекта (ПО), основанный на стабилизации астротелескопа, установленного на ПО относительно местной вертикали, пеленгации астротелескопом не менее трех источников навигации, измерении их текущих угловых координат относительно текущей местной вертикали астротелескопа ПО и вычислении координат местоположения ПО по измеренным значениям зенитных углов источников навигации, отличающийся тем, что в качестве источников навигации для ПО используют искусственные спутники земли (ИСЗ) с известными текущими координатами Хс, Ус, Zc, производят их автосопровождение астротелескопом ПО, измеряют текущие зенитные углы bc каждого ИСЗ относительно нормали гиростабилизированной платформы ПО, переводят измеренные значения зенитных углов bc каждого ИСЗ к центральному зенитному углу b с вершиной в центре Земли и вычисляют координаты ПО согласно выражениям вида:
bci=arcctg(ctg(b)-R/(Rci*sin(b)),
bi=arccos((Rci+R-Ro)/(2Rci*R)),
где i - порядковый номер ИСЗ;
I - количество наблюдаемых ИСЗ, причем I≥2;
R=X+Y+Z - расстояние от центра Земли до ПО в прямоугольной системе координат;
Rc=Хс+Yc+Zc - расстояние от центра Земли до ИСЗ в прямоугольной системе координат;
Ro=(Xc-X)+(Yc-Y)+(Zc-Z) - расстояние от ПО до ИСЗ в прямоугольной системе координат.
2. Устройство для реализации способа по п. 1 содержит гиростабилизированную платформу, механический выход которой через систему наведения и следящую систему соединен с механическим входом астротелескопа, электрический вход которого через следящую систему и систему наведения связан с выходом блока наведения, первый вход которого связан с внешним источником информации, а второй - с электрическим выходом гиростабилизированной платформы, первый вход блока вычисления углов связан с электрическим выходом следящей системы, а второй - с внешним источником информации, выход блока вычисления углов связан с входом блока вычисления координат, выход которого является выходом предлагаемого устройства.
| Помыкаев И.И., Селезнев В.П., Дмитроченко Д.А | |||
| Навигационные приборы и системы | |||
| - М.: Машиностроение, 1983, с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ ВИРТУАЛЬНЫХ ИЗМЕРЕНИЙ ЗЕНИТНЫХ РАССТОЯНИЙ ЗВЕЗД | 2010 |
|
RU2454631C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2006 |
|
RU2318188C1 |
| US 5054719 A1, 08.10.1991 | |||
| DE 3417661 A1, 15.11.1984. | |||

