Изобретение относится к способу управления электромагнитным моментом трехфазной синхронной машины с постоянными магнитами и, в частности, управления моментом при напряжениях насыщения.
В автотранспортном средстве на электрической тяге необходимо регулировать момент, создаваемый электрическим двигателем. Поскольку момент электрической машины напрямую связан с проходящими в ней токами, эти токи необходимо точно регулировать.
В синхронной машине, в частности в трехфазной синхронной машине с постоянными магнитами и с осевым магнитным потоком, токи в трех фазах статора являются синусоидальными и смещены по фазе, каждый на ^-рад. Эти токи создают в электрической машине вращающееся магнитное поле. Ротор состоит из постоянных магнитов, например, от 1 до 5 пар полюсов. Подобно компасу ротор естественным образом устанавливается по создаваемому ротором вращающемуся магнитному полю. Частота вращения ротора равна частоте токов статора (синхронна). Именно амплитуда токов статора и мощность магнитов ротора создают момент, необходимый для вращения машины. Для управления этими токами следует к каждой фазе статора прикладывать синусоидальные напряжения, тоже смещенные по фазе, каждое, на 2π/3 рад.
Обычно проще применять регулирование к постоянным, чем к синусоидальным токам. Как правило, используют преобразование Парка для проецирования трехфазной системы на двухмерное пространство, с тем чтобы получить положение в эквивалентной вращающейся системе координат. Таким образом, можно транспонировать три синусоидальных тока и три синусоидальных напряжения статора, относящихся к трем фазам трехфазной системы, в пространство, в котором эти три синусоидальных сигнала тока или напряжения выражаются в виде двух постоянных сигналов тока или напряжения (одна составляющая по прямой оси Xd и одна составляющая по квадратурной оси Xq). Для этого преобразование Парка выполняется на основе системы координат, связанной с вращающимся полем, то есть в случае синхронной машины - на основе системы координат, связанной с ротором.
Таким образом, при работе с токами и напряжениями, выраженными в пространстве Парка, можно оперировать с постоянными токами или напряжениями, а не с синусоидальными сигналами для регулирования трехфазной машины, которой требуется управлять.
Посредством обратного преобразования можно вернуться к нормальной системе координат машины и, следовательно, точно узнать, какие напряжения или какие токи необходимо применить для каждой фазы машины.
Использование батареи в качестве источника питания трехфазной электрической машины налагает дополнительные условия в том смысле, что прикладываемые напряжения ограничены емкостью батареи. Действительно, невозможно достичь некоторых заданных значений по причине этих ограничений. Обычно заданное значение за пределами достижимой области является причиной нестабильности.
Задачей является обеспечение стабильности токов в машине во время ее регулирования несмотря на ограничения по напряжению. Если в условиях этих ограничений заданные значения являются не достижимыми, то ставится задача приблизиться максимально близко к заданному значению насколько это возможно.
В документе US 3851234 описан способ предупреждения магнитного насыщения за счет снижения скорости двигателя, производящего крутящий момент.
В документе US 5015937 описан способ управления синхронной машиной с ротором с обмоткой в режиме разомкнутого контура с таблицами данных, чтобы избегать насыщения.
В документе US 6181091 описан способ управления синхронной машиной с постоянными магнитами, в которой насыщения избегают путем изменения режима работы модуля модулирования фазовой ширины, обеспечивая напряжения на каждом плече двигателя.
В этих известных способах управления электромагнитный момент, достигаемый синхронной машиной, уменьшают, чтобы избегать насыщения по напряжению, а именно, непосредственно регулируя составляющую тока в пространстве Парка.
Фактически, для того чтобы можно было достичь заданного значения для составляющей тока по квадратурной оси, обычно вычисляют картографию соответствующей составляющей тока по прямой оси, чтобы поддерживать регулирование составляющей тока по квадратурной оси. Недостатком этого метода является необходимость процедуры составления картографий токов. Кроме того, он не позволяет обеспечивать получение оптимальных токов для заданного электромагнитного момента. Действительно, при использовании метода картографии, для того чтобы не оказаться в условиях насыщения по напряжению, предусмотрен запас надежности для значения составляющей тока по прямой оси, то есть составляющую тока по прямой оси уменьшают сверх необходимости, чтобы избежать риска насыщения при управлении системой, в ущерб производительности машины.
Такое уменьшение составляющей тока по прямой оси влечет за собой понижение напряжений и, следовательно, уменьшение достигаемого электромагнитного момента.
Изобретением предлагается способ управления электромагнитным моментом трехфазной синхронной машины с постоянными магнитами, который обеспечивает стабильность токов в синхронной машине при ее работе с высокой скоростью и с напряжениями насыщения.
Согласно аспекту изобретения предложен способ управления электромагнитным моментом трехфазной синхронной машины с постоянными магнитами, включающий измерение тока, подаваемого на три фазы машины, преобразование трех измеренных токов в составляющую тока по прямой оси и составляющую тока по квадратурной оси на основе преобразования трехфазных систем и прием заданного значения для составляющей тока по квадратурной оси.
Согласно признаку изобретения, если составляющая тока по прямой оси является отрицательной, активируют режим управления с уменьшением магнитного потока, при котором машиной управляют на основе составляющей напряжения по прямой оси и составляющей напряжения по квадратурной оси указанной машины, при этом составляющую напряжения по прямой оси и составляющую напряжения по квадратурной оси определяют в плоскости, связанной с указанным преобразованием трехфазных систем.
Указанным преобразованием трехфазных систем может быть преобразование Парка. Это преобразование также может быть преобразованием Фортескью, преобразованием Кларка или преобразованием Кью.
В пространстве Парка управляемая система имеет составляющую напряжения по прямой оси и составляющую напряжения по квадратурной оси, прикладываемые по двум осям плоскости Парка (прямая ось и квадратурная ось) синхронной машины, при этом обе составляющие напряжения выражаются в виде функции от составляющей тока по прямой оси и составляющей тока по квадратурной оси синхронной машины; причем эти две составляющие тока направлены соответственно по указанным двум осям плоскости Парка. Когда ротор синхронной машины имеет высокую скорость вращения, составляющая тока по прямой оси имеет отрицательное значение и это приводит к потерям, если составляющая тока по прямой оси не компенсируется.
Режим управления с уменьшением потока позволяет компенсировать величину, обусловленную магнитным потоком постоянных магнитов, которая пропорциональна скорости вращения ротора; магнитный поток магнитов является постоянным, поэтому он не становится ничтожно малым при высокой скорости вращения ротора. Величина, обусловленная этим магнитным потоком и называемая также электромагнитной силой машины (соответствует понятию «эдс» в российской терминологии), вызывает возмущения, которые необходимо компенсировать. Таким образом, управление синхронной машиной по напряжению при высокой скорости вращения позволяет в максимальной степени все время компенсировать возмущение, связанное с магнитным потоком.
Предпочтительно, когда составляющая тока по прямой оси опять становится положительной или нулевой, режим управления с уменьшением магнитного потока прекращают.
Предпочтительно синхронная машина имеет идеальную симметрию между прямой осью и квадратурной осью указанной плоскости преобразования трехфазных систем, что позволяет получать равенство между эквивалентными индуктивностями по каждой оси в этой плоскости преобразования трехфазных систем.
Предпочтительно составляющая по прямой оси и составляющая по квадратурной оси напряжения управления синхронной машиной зависят от одного и того же параметра управления, определяемого таким образом, чтобы поддерживать значение составляющей тока по прямой оси близким к нулю и позволяющим компенсировать величину, обусловленную магнитным потоком постоянных магнитов.
Когда составляющая тока по прямой оси имеет отрицательное значение, эта составляющая представляет собой потери для машины. Поэтому необходимо поддерживать эту составляющую тока по прямой оси на предельно низком значении, чтобы максимально уменьшить потери, одновременно сохраняя значение этой составляющей тока по прямой оси на достаточном уровне, чтобы компенсировать электромагнитную силу, соответствующую указанной величине, обусловленной магнитным потоком, создаваемым постоянными магнитами ротора.
Предпочтительно составляющая по прямой оси и составляющая по квадратурной оси напряжения управления являются пропорциональными одной и той же максимальной амплитуде и синусоидально зависят от параметра управления (Θ), при этом параметр управления (Θ) изменяется, например, в интервале  . В целом, параметр управления (Θ) изменяется в интервале с диапазоном, меньшим или равным π.
. В целом, параметр управления (Θ) изменяется в интервале с диапазоном, меньшим или равным π.
Другим объектом изобретения является система управления электромагнитным моментом трехфазной синхронной машины с постоянными магнитами, содержащая средства измерения тока, подаваемого на три фазы машины, средства преобразования трех измеренных токов в составляющую тока по прямой оси и в составляющую тока по квадратурной оси на основе преобразования Парка, средства приема заданного значения для составляющей тока по квадратурной оси, характеризующаяся тем, что содержит средства управления, выполненные с возможностью активации, - когда составляющая тока по прямой оси является отрицательной, - режима управления с уменьшением потока, при этом машина управляется на основе составляющей напряжения по прямой оси и составляющей напряжения по квадратурной оси указанной машины, причем составляющая напряжения по прямой оси и составляющая напряжения по квадратурной оси определены в плоскости Парка.
Предпочтительно средства управления содержат модуль активации, выполненный с возможностью активации режима управления с уменьшением потока, когда составляющая тока по прямой оси является отрицательной, и с возможностью деактивации режима управления с уменьшением потока, когда составляющая тока по прямой оси является положительной.
Предпочтительно средства управления содержат пропорционально-интегральный регулятор, выполненный с возможностью определения одного и того же параметра управления для составляющей напряжения по прямой оси и составляющей напряжения по квадратурной оси на основе разности между заданным значением для составляющей тока по квадратурной оси и значением составляющей тока по квадратурной оси, и содержат модуль, предназначенный для определения составляющих напряжения по прямой и квадратурной осям на основе указанного параметра управления.
Система управления может также содержать средства преобразования, выполненные с возможностью применения преобразования Парка к измеренным токам для получения составляющей тока по прямой оси и составляющей тока по квадратурной оси.
Другие преимущества и признаки изобретения будут более очевидны из нижеследующего подробного описания неограничительного варианта выполнения со ссылками на прилагаемые чертежи, на которых:
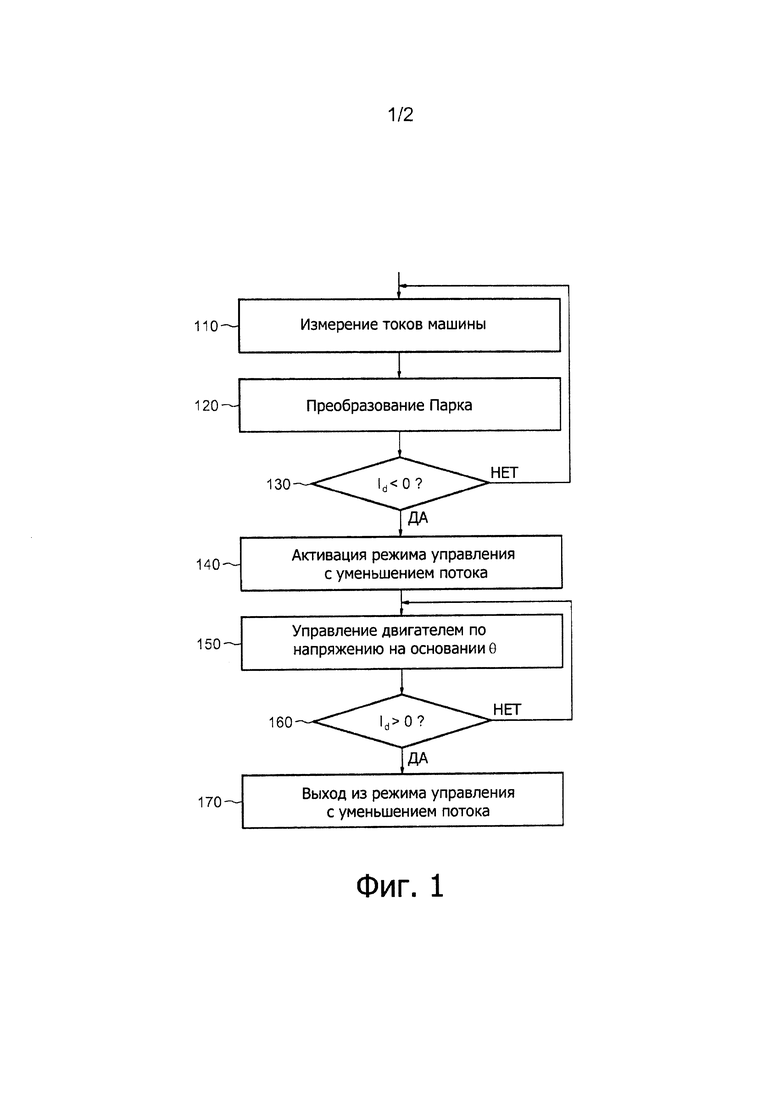
Фиг. 1 - блок-схема способа управления электромагнитным моментом синхронной машины согласно варианту осуществления.
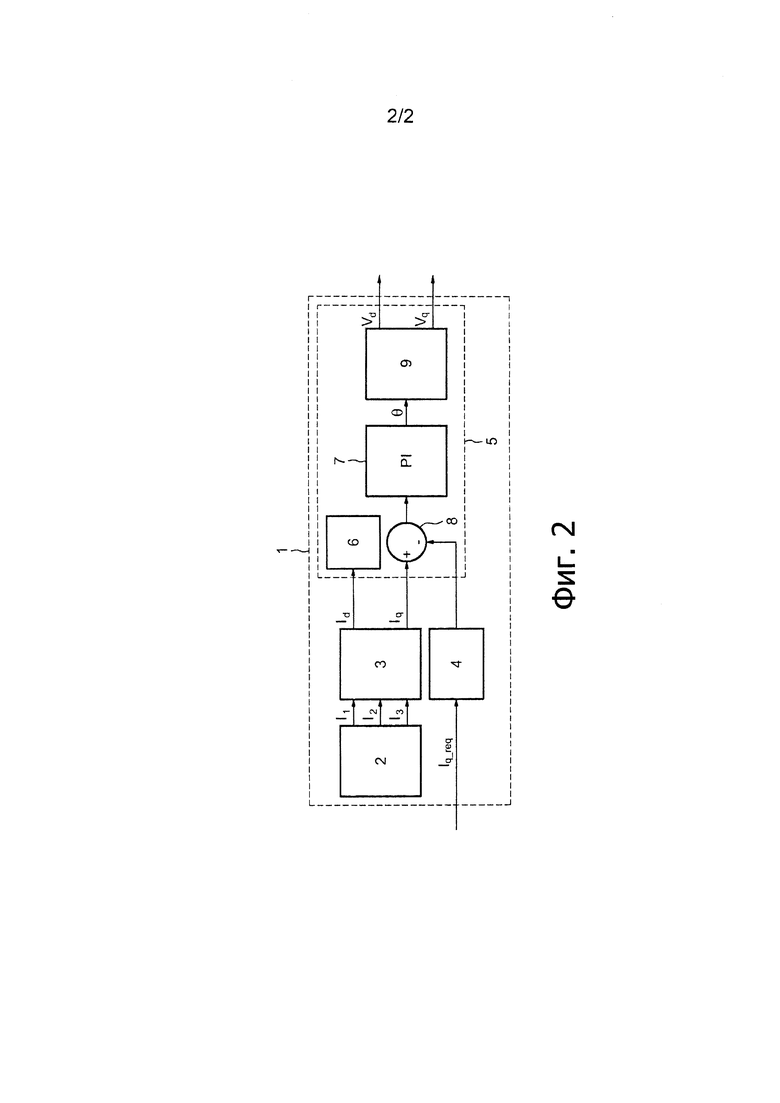
Фиг. 2 - схема системы управления электромагнитным моментом синхронной машины согласно варианту выполнения изобретения.
На фиг. 1 согласно варианту выполнения изобретения представлена блок-схема способа управления электромагнитным моментом синхронной машины, когда происходит насыщение по напряжению.
На первом этапе 110 измеряют ток для каждой из трех фаз трехфазной синхронной машины с постоянными магнитами.
На втором этапе 120 к трем измеренным токам применяют преобразование Парка для получения составляющей тока Id по прямой оси и составляющей тока Iq по квадратурной оси.
В пространстве Парка для управления синхронной машиной применяют следующую систему уравнений:

где Vd и Vq - напряжения, прикладываемые по двум осям, а именно по прямой и квадратурной оси соответственно в плоскости Парка указанной синхронной машины, Id и Iq являются токами, протекающими в машине по двум осям, а именно по прямой и квадратурной оси соответственно в плоскости Парка, Rs - эквивалентное сопротивление статора машины, Ld и Lq - индуктивности по прямой и квадратурной оси соответственно в плоскости Парка указанной машины, ωr - скорость вращения магнитного поля машины (то есть скорость вращения ротора, умноженная на число пар полюсов машины), φf - поток (соответствует понятию «потокосцепление» в российской терминологии), создаваемый магнитами ротора.
Напряжения Vd и Vq создаются инвертором, питаемым батареей. Следовательно, необходимо соблюдать условия

где Vbat - напряжение батареи, которая питает инвертор и преобразователь тока.
При этом ставится задача генерирования электромагнитного момента с наилучшим КПД для синхронной машины в известном диапазоне скоростей и, в частности, на высокой скорости. При высокой скорости вращения двигателя напряжения управления машиной соответствуют насыщенному состоянию, и составляющая тока Id по прямой оси в плоскости Парка является отрицательной.
Поэтому на этапе 130 определяют, имеет ли составляющая тока по прямой оси отрицательное значение. Если составляющая Id тока по прямой оси в пространстве Парка имеет отрицательное значение, на этапе 140 активируют режим управления с уменьшением потока.
Электромагнитный момент, создаваемый синхронной машиной, можно вычислить при помощи следующего выражения:

где Cem - электромагнитный момент, генерируемый машиной, р - число пар полюсов ротора машины, φd и φq - составляющие потока, генерируемые машиной по прямой и квадратурной осям, которые можно выразить в виде

В настоящем случае синхронная машина имеет идеальную симметрию между прямой осью и квадратурной осью в пространстве Парка. При этом получают примечательное свойство Ld=Lq, что позволяет записать

Таким образом, в такой машине, чтобы управлять моментом с максимальным ограничением джоулевых потерь, генерируемых составляющей тока Id по прямой оси, необходимо иметь составляющую тока Id по прямой оси, наиболее близкую к нулю, поскольку в создании электромагнитного момента участвует только составляющая тока Iq по квадратурной оси.
Изобретение можно применять также, как в случае, когда Ld=Lq, если Ld превышает Lq, но в этом случае необходимо корректировать заданное значение составляющей тока Iq по квадратурной оси как функцию от действующей составляющей тока Id по прямой оси таким образом, чтобы обеспечивать постоянный момент. Действительно, в случае отрицательной составляющей тока Id по прямой оси это приводит к уменьшению генерируемого машиной момента. Минимизировать потерю момента можно посредством максимального приближения составляющей тока Id по прямой оси к нулю.
Однако на высокой скорости невозможно полностью исключить составляющую тока Id по прямой оси, поскольку величина ωrφƒ, называемая электромагнитной силой и связанная с потоком постоянных магнитов, становится слишком большой и ее необходимо компенсировать. Чтобы она была оптимальной, следует использовать все имеющееся напряжение, то есть

Vd и Vq можно выразить при помощи переменной управления Θ, которую вычисляют посредством следующего преобразования:

Токи в установившемся режиме с высокой скоростью вращения можно выразить в виде
Однако при высокой скорости вращения получают Rs<<ωrLd=ωrLq, что позволяет получить для уравнения (8)
Поскольку поток, создаваемый магнитами, является постоянным, он не играет никакой роли с точки зрения управления. Поэтому он воспринимается как возмущение. На основании уравнения (7) получают, таким образом, установившийся режим при высокой скорости

где  и
и  и
и  и
и 
При высокой скорости вращения ротора указанную электромагнитную силу полностью компенсировать невозможно и, таким образом,
Vbat/√3<ωrφƒ,
вследствие применения Gd < возмущениеd и
Gq > возмущениеq, так как  .
.
Активация режима управления с уменьшением потока на этапе 140 приводит на этапе 150 к управлению напряжением двигателя на основании параметра управления Θ, изменяющегося в интервале  . При изменении параметра управления Θ в этом интервале составляющая тока Iq по квадратурной оси меняется в положительной и отрицательной области, заставляя, таким образом, синхронную машину работать в режиме двигателя и в режиме генератора, максимально компенсируя при этом указанный параметр возмущениеd и ограничивая составляющую тока Id по прямой оси, являющуюся источником джоулевых потерь. Синхронная машина остается с напряжениями насыщения, позволяя получать максимальный электромагнитный момент, но регулируя при этом токи, благодаря управлению машиной по напряжению через параметр управления Θ.
. При изменении параметра управления Θ в этом интервале составляющая тока Iq по квадратурной оси меняется в положительной и отрицательной области, заставляя, таким образом, синхронную машину работать в режиме двигателя и в режиме генератора, максимально компенсируя при этом указанный параметр возмущениеd и ограничивая составляющую тока Id по прямой оси, являющуюся источником джоулевых потерь. Синхронная машина остается с напряжениями насыщения, позволяя получать максимальный электромагнитный момент, но регулируя при этом токи, благодаря управлению машиной по напряжению через параметр управления Θ.
На этапе 160 проверяют, чтобы составляющая тока Id по прямой оси больше не была отрицательной. Если она по-прежнему остается отрицательной, продолжают управлять синхронной машиной по напряжению на основе параметра управления Θ. При использовании параметра управления Θ, чтобы увеличить составляющую тока Iq по квадратурной оси, необходимо увеличить параметр управления Θ до максимального значения π/2 для получения максимальной мощности, развиваемой машиной, при этом составляющая тока Id по прямой оси автоматически уменьшается с увеличением параметра управления Θ. С другой стороны, для уменьшения составляющей тока Iq по квадратурной оси необходимо уменьшить параметр управления Θ до минимального значения -π/2, чтобы получить максимальный тормозной момент. Таким образом, изобретение обеспечивает автоматическую адаптацию составляющей тока Id по прямой оси.
Если же она перестает быть отрицательной, на этапе 170 выходят из режима управления с уменьшением потока.
На фиг. 2 показана система управления электромагнитным моментом трехфазной синхронной машины с постоянными магнитами согласно варианту выполнения изобретения.
Система 1 управления электромагнитным моментом трехфазной синхронной машины с постоянными магнитами содержит средства 2 измерения тока, подаваемого на три фазы I1, I2, I3 машины. Эти средства 2 измерения связаны со средствами 3 преобразования, позволяющие преобразовать три измеренных тока в составляющую тока Id по прямой оси и составляющую тока Iq по квадратурной оси на основе преобразования Парка. Система управления содержит также средства 4 приема заданного значения Iq_req для составляющей тока Iq по квадратурной оси.
Система 1 управления содержит средства 5 управления, содержащие модуль 6 активации, принимающий на входе составляющую тока Id по прямой оси, и выполненные с возможностью активации режима управления с уменьшением потока, в котором машиной управляют на основе составляющей напряжения по прямой оси и составляющей напряжения по квадратурной оси в пространстве Парка указанной машины, когда составляющая тока Id по прямой оси является отрицательной.
Средства 5 управления содержат пропорционально-интегральный регулятор 7, выполненный с возможностью определения одного и того же параметра управления, от которого зависят составляющая напряжения по прямой оси и составляющая напряжения по квадратурной оси. Параметр управления зависит от вычисляемой вычитающим устройством 8 разности между заданным значением Iq_req для составляющей тока Iq по квадратурной оси и указанной составляющей тока Iq по квадратурной оси. Средства управления содержат также модуль 9, предназначенный для определения составляющей напряжения Vd по прямой оси и составляющей напряжения Vq по квадратурной оси на основе параметра управления Θ.
Таким образом, изобретение позволяет управлять электромагнитным моментом синхронной машины с постоянными магнитами, обеспечивая стабильность токов в синхронной машине, когда она работает на высокой скорости с напряжениями насыщения.
Изобретение относится к области электротехники и может быть использовано для управления электромагнитным моментом трехфазной синхронной машины с постоянными магнитами. Техническим результатом является обеспечение стабильности токов в синхронной машине при ее работе с высокой скоростью и напряжением насыщения. Способ управления электромагнитным моментом трехфазной синхронной машины с постоянными магнитами, включающий в себя измерение тока, подаваемого на три фазы машины, преобразование трех измеренных токов в постоянную составляющую (Id) и в квадратурную составляющую (Iq) тока на основании преобразования Парка, получение заданного значения (Iq_req) для квадратурной составляющей (Iq) тока. Если постоянная составляющая (Id) тока является отрицательной, активируют режим управления с уменьшением потока, при котором машиной управляют на основании постоянной составляющей (Vd) и квадратурной составляющей (Vq) напряжения указанной машины, при этом постоянную составляющую (Vd) и квадратурную составляющую (Vq) напряжения управления синхронной машиной определяют в плоскости Парка. 2 н. и 7 з.п. ф-лы, 2 ил.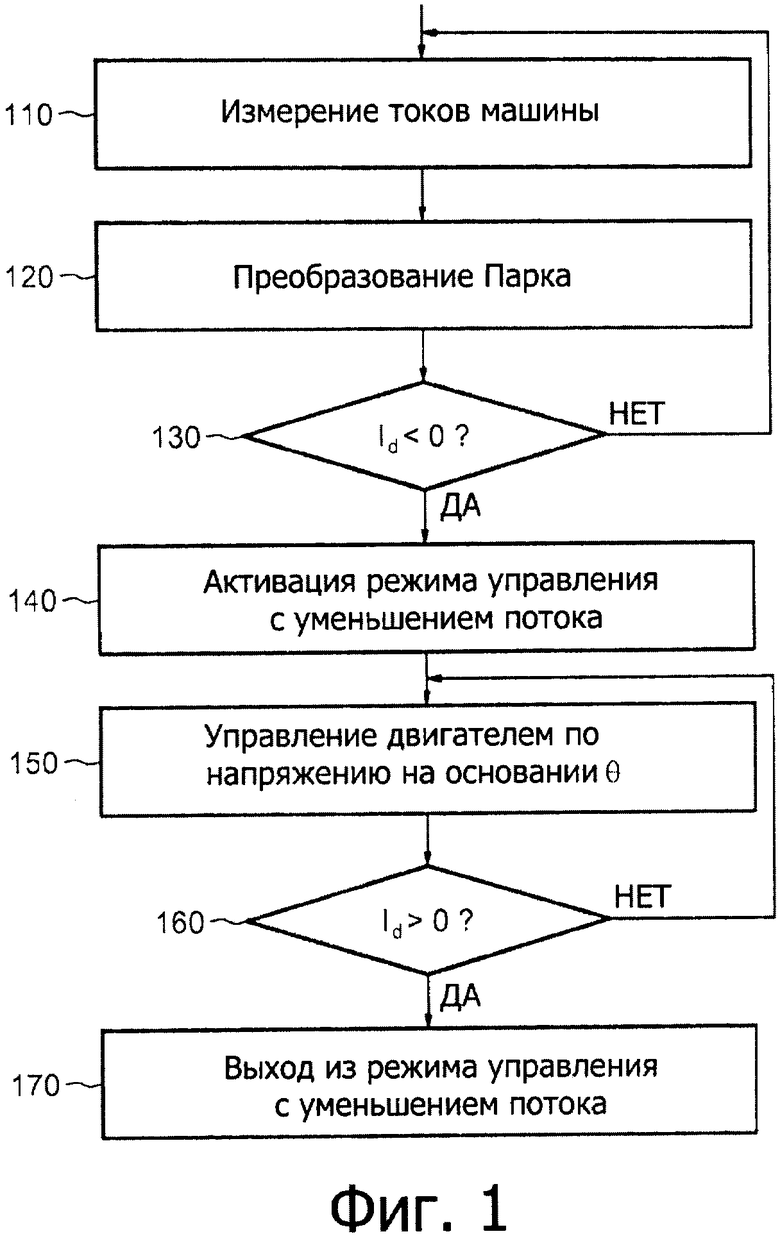
1. Способ управления электромагнитным моментом трехфазной синхронной машины с постоянными магнитами, включающий в себя измерение тока, подаваемого на три фазы машины, преобразование трех измеренных токов в составляющую тока (Id) по прямой оси и составляющую тока (Iq) по квадратурной оси на основе преобразования трехфазных систем, прием заданного значения (Iq_req) для составляющей тока (Iq) по квадратурной оси, и, если составляющая тока (Id) по прямой оси является отрицательной, активируют режим управления с уменьшением магнитного потока, при котором машиной управляют на основе составляющей напряжения (Vd) по прямой оси и составляющей напряжения (Vq) по квадратурной оси указанной машины, при этом составляющую напряжения (Vd) по прямой оси и составляющую напряжения (Vq) по квадратурной оси определяют в плоскости, связанной с указанным преобразованием трехфазных систем, отличающийся тем, что указанные составляющая (Vd) по прямой оси и составляющая (Vq) по квадратурной оси напряжения управления синхронной машиной зависят от одного и того же параметра (Θ) управления, который определяют таким образом, чтобы поддерживать значение составляющей тока (Id) по прямой оси близким к нулю и позволяющим компенсировать величину, обусловленную магнитным потоком постоянных магнитов.
2. Способ по п. 1, в котором, когда составляющая тока (Id) по прямой оси опять становится положительной или нулевой, режим управления с уменьшением потока прекращают.
3. Способ по п. 1 или 2, в котором синхронная машина имеет идеальную симметрию между прямой осью и квадратурной осью плоскости указанного преобразования трехфазных систем, позволяющую получать равенство между эквивалентными значениями индуктивности (Ld и Lq) по каждой оси плоскости преобразования трехфазных систем.
4. Способ по п. 1 или 2, в котором составляющие напряжения управления по прямой оси (Vd) и по квадратурной оси (Vq) являются пропорциональными одной и той же максимальной амплитуде (Vbat) и синусоидально зависят от параметра управления (Θ), при этом параметр управления (Θ) изменяется в интервале  .
.
5. Способ по п. 4, в котором указанные составляющая по прямой оси и составляющая по квадратурной оси соответствуют следующим выражениям:
6. Способ по п. 1 или 2, в котором указанное преобразование трехфазных систем является преобразованием Парка.
7. Система (1) управления электромагнитным моментом трехфазной синхронной машины с постоянными магнитами, содержащая средства (2) измерения тока, подаваемого на три фазы машины, средства (3) преобразования трех измеряемых токов в составляющую тока (Id) по прямой оси и составляющую тока (Iq) по квадратурной оси на основе преобразования трехфазных систем, средства (4) приема заданного значения (Iq_req) для составляющей тока (Iq) по квадратурной оси, средства (5) управления, выполненные с возможностью активации, если составляющая тока (Id) по прямой оси является отрицательной, режима управления с уменьшением потока, при котором машиной управляют на основе составляющей напряжения (Vd) по прямой оси и составляющей напряжения (Vq) по квадратурной оси указанной машины, при этом составляющую напряжения (Vd) по прямой оси и составляющую напряжения (Vq) по квадратурной оси определяют в плоскости, связанной с указанным преобразованием трехфазных систем, отличающаяся тем, что средства (5) управления содержат пропорционально-интегральный регулятор (7), выполненный с возможностью определения одного и того же параметра управления (Θ) для составляющей напряжения (Vd) по прямой оси и составляющей напряжения (Vq) по квадратурной оси, который зависит от разности между заданным значением (Iq_req) для составляющей тока по квадратурной оси и указанной составляющей тока (Iq) по квадратурной оси, и модуль (9), предназначенный для определения указанных составляющих напряжения по прямой оси и квадратурной оси на основании указанного параметра управления.
8. Система по п. 7, в которой средства управления содержат модуль активации, выполненный с возможностью активации режима управления с уменьшением потока, когда составляющая (Id) тока по прямой оси является отрицательной, и деактивации режима управления с уменьшением потока, когда составляющая (Id) тока по прямой оси является положительной.
9. Система по п. 7 или 8, содержащая средства (3) преобразования, выполненные с возможностью применения преобразования Парка к измеряемым токам для получения составляющей тока (Id) по прямой оси и составляющей тока (Iq) по квадратурной оси.
| US 5656911 A, 12.08.1997 | |||
| US 5656911 A, 12.08.1997 | |||
| US 5656911 A, 12.08.1997 | |||
| US 2005231150 A1, 20.10.2005 | |||
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| JPS 5749384 A, 23.03.1982 | |||
| US 7256563 B2, 15.05.1990. | |||

