Изобретение относится к способу управления электромагнитным моментом трансмиссии автотранспортного средства, оборудованного приводной электрической машиной, и, в частности, гибридной трансмиссии автотранспортного средства, оборудованного двигателем внутреннего сгорания и приводной электрической машиной.
Как правило, гибридная трансмиссия содержит два концентричных первичных вала, на каждом из которых установлена, по меньшей мере, одна шестерня перехода на вторичный вал, соединенный с колесами транспортного средства, первое средство соединения между двумя первичными валами, которое может занимать три положения: первое положение, в котором двигатель внутреннего сгорания отсоединен от кинематический цепи, соединяющей электрическую машину с колесами, второе положение, в котором двигатель внутреннего сгорания приводит во вращение колеса независимо от электрической машины, и третье положение, в котором двигатель внутреннего сгорания и электрическая машина соединены таким образом, чтобы объединять их соответствующие крутящие моменты, передаваемые в направлении колес.
Существует также три положения для соединения первичного вала, связанного с электрическим двигателем, с вторичным валом: первое положение, в котором электрический двигатель не связан напрямую с вторичным валом, второе положение, в котором электрический двигатель напрямую соединен с вторичным валом с первым передаточным отношением, и третье положение, в котором электрический двигатель напрямую соединен с вторичным валом с вторым передаточным отношением.
В случае, когда только электрическая машина обеспечивает тяговый крутящий момент для автотранспортного средства, то есть в случае чисто электрической тяги, как в чисто электрическом транспортном средстве, необходимо контролировать крутящий момент электрической машины. Поскольку крутящий момент электрической машины напрямую связан с проходящими в ней токами, необходимо точно управлять этими токами.
В электрической машине, в частности в трехфазной синхронной машине с постоянными магнитами и с осевым потоком, токи в трех фазах статора являются синусоидальными и смещены по фазе, каждый, на  . Эти токи создают вращающееся магнитное поле в электрической машине. Ротор состоит из постоянных магнитов, например, от 1 до 5 пар полюсов. Наподобие компаса, ротор естественным образом ориентируется по создаваемому ротором вращающемуся магнитному полю. Таким образом, частота вращения ротора равна частоте токов статора (в синхронной машине). Именно амплитуды токов статора и мощность магнитов ротора создают крутящий момент, необходимый для вращения машины. Для управления этими токами необходимо приложить к каждой фазе статора синусоидальные напряжения, тоже смещенные по фазе на каждое.
. Эти токи создают вращающееся магнитное поле в электрической машине. Ротор состоит из постоянных магнитов, например, от 1 до 5 пар полюсов. Наподобие компаса, ротор естественным образом ориентируется по создаваемому ротором вращающемуся магнитному полю. Таким образом, частота вращения ротора равна частоте токов статора (в синхронной машине). Именно амплитуды токов статора и мощность магнитов ротора создают крутящий момент, необходимый для вращения машины. Для управления этими токами необходимо приложить к каждой фазе статора синусоидальные напряжения, тоже смещенные по фазе на каждое.
Как правило, гораздо проще применять регулирование к постоянным, чем к синусоидальным сигналам. Обычно используют преобразование трехфазных систем, такое как преобразование Парка, чтобы перевести трехфазную систему в двухмерное пространство для получения эквивалентной однофазной системы. Так, можно преобразовать три синусоидальных тока и три синусоидальных напряжения статора, связанных с тремя фазами трехфазной системы, в пространство, где три синусоидальных сигнала тока или напряжения выражены в виде двух постоянных сигналов тока или напряжения, один - по прямой оси Xd и другой - по квадратурной оси Xq. Для этого система координат Парка отталкивается от системы координат, связанной с вращающимся полем, то есть в случае синхронной машины, системы координат, связанной с ротором.
Работая с токами и напряжениями, выраженными в пространстве Парка, для регулирования управляемой трехфазной машины, можно воздействовать на постоянные сигналы тока или напряжения, а не на синусоидальные сигналы.
Путем обратного преобразования можно прейти в нормальную систему координат машины и, следовательно, точно определить, какие напряжения или какие токи следует подать на каждую фазу машины.
Использование батареи в качестве источника питания трехфазной электрической машины налагает дополнительные ограничения, поскольку прикладываемые напряжения ограничены мощностью батареи. Действительно, невозможно достигать некоторых заданных значений по причине этих ограничений. Заданное значение за пределами достигаемого пространства часто является причиной нестабильности.
Задачей изобретения является обеспечение стабильности токов в машине во время ее регулирования, несмотря на ограничения по напряжению. Если при этих ограничениях заданные значения остаются недостижимыми, то ставится задача максимально приблизиться к заданному значению.
В документе US 6181091 описан способ управления синхронной машиной с постоянными магнитами, в которой избегают насыщения за счет изменения работы модуля широтно-импульсной модуляции (ШИМ), обеспечивая напряжения на каждой ветви двигателя. В этом известном способе управления электромагнитный момент, создаваемый синхронной машиной, уменьшают, чтобы избежать насыщения по напряжению, в частности, управляя напрямую составляющей тока в пространстве Парка.
Как правило, для управления составляющей тока по квадратурной оси используют картографию, которая дает составляющую тока по прямой оси в зависимости от искомого заданного значения составляющей тока по квадратурной оси. Недостатком этого метода является необходимость осуществления операции составления картографий тока. Кроме того, невозможно обеспечить получение оптимальных токов для данного электромагнитного момента. Действительно, при таком картографическом методе, чтобы гарантированно не попасть в условия насыщения по напряжению, предусматривают запас надежности для значения составляющей тока по прямой оси, то есть составляющую тока по прямой оси уменьшают больше, чем это необходимо, чтобы избежать рисков насыщения при управлении системой. Этот запас надежности устанавливают в ущерб производительности машины.
Такое уменьшение составляющей тока по прямой оси влечет за собой снижение напряжений и, следовательно, уменьшение доступного электромагнитного момента.
Изобретение направлено на создание способа управления электромагнитным моментом электрической машины с постоянными магнитами, позволяющий обеспечивать стабильность токов в электрической машине, независимо от режима электрической машины и с заранее определенными постоянными коэффициентами усиления регулятора.
Согласно варианту изобретения, предложена система управления электромагнитным моментом трехфазной электрической машины с постоянными магнитами, содержащая средства измерения тока, поступающего на три фазы машины, средства преобразования, выполненные с возможностью преобразования трех измеренных токов в составляющую тока по прямой оси и составляющую тока по квадратурной оси на основании преобразования трехфазных систем, средства преобразования, выполненные с возможностью преобразования заданного значения момента в заданное значение для составляющей тока по квадратурной оси и в заданное значение для составляющей тока по прямой оси, средства определения управляющих напряжений и средства управления, выполненные с возможностью подачи определенных управляющих напряжений на электрическую машину.
Согласно общему признаку изобретения, средства определения содержат первый вычислительный модуль, получающий указанные составляющие тока по прямой оси и по квадратурной оси, а также указанные заданные значения, при этом первый вычислительный модуль выполнен с возможностью применения изменения переменных и выдачи совокупности управляющих переменных в модуль регулирования, выполненный с возможностью выдачи параметров управления, вычисленных при помощи системы уравнения в зависимости от управляющих переменных, при этом система уравнений изолирует члены помех, связанные с потоком, создаваемым магнитами ротора электрической машины, от членов, участвующих в электромагнитном моменте, и второй вычислительный модуль, выполненный с возможностью вычисления управляющих напряжений на основании составляющих напряжения по прямой оси и по квадратурной оси, определенных на основании параметров управления.
Изменение переменной позволяет трансформировать систему уравнений, регулирующую электромагнитный момент, выраженную в пространстве Парка, в систему управлений, содержащую эндогенные переменные, характерные для электромагнитного момента, и экзогенные переменные, характерные для возмущений, связанных с потоком. Таким образом, это изменение переменной позволяет изолировать по частоте помехи от управления электромагнитным моментом и компенсировать помехи.
Эта система управления позволяет также ослабить колебания тока электрической машины и сгладить, таким образом, электромагнитный момент электрической машины.
Преобразование трехфазных систем может быть преобразованием Парка. Оно может быть также преобразованием Фортескью, преобразованием Кларка или преобразованием Кью.
В пространстве Парка переменные включают в себя составляющую по прямой оси и составляющую по квадратурной оси, применяемые по двум осям плоскости Парка (прямая ось и квадратурная ось) синхронной машины. Составляющие напряжения по прямой оси и по квадратурной оси выражают в зависимости от составляющей тока по прямой оси и составляющей тока по квадратурной оси синхронной машины.
Предпочтительно синхронная машина имеет симметрию между прямой осью и квадратурной осью в плоскости преобразования трехфазных систем, позволяющую получать составляющую эквивалентной индуктивности по прямой оси, по существу эквивалентную составляющей эквивалентной индуктивности по квадратурной оси.
Эту симметрию можно получить при изготовлении электрической машины, используя гладкие и не выступающие полюсы. Она позволяет выражать электромагнитный момент электрической машины в зависимости от единого коэффициента потока, связанного с магнитами электрической машины.
В пространстве Парка регулируемую систему уравнений выражают на основании управляющих переменных в соответствии с выражением:
В этом выражении Ls=Ld=Lq является эквивалентной индуктивностью, и Rs=Rd=Rq является эквивалентным сопротивлением, при этом  и Xq=Iq-Id, где Id выражает составляющую тока электрической машиной по прямой оси, и Iq - выражает ее составляющую тока по квадратурной оси, и
и Xq=Iq-Id, где Id выражает составляющую тока электрической машиной по прямой оси, и Iq - выражает ее составляющую тока по квадратурной оси, и  и Uq=-Vd+Vq, где Vd выражает составляющую напряжения на клеммах электрической машины по прямой оси, и Vq - выражает ее составляющую напряжения по квадратурной оси.
и Uq=-Vd+Vq, где Vd выражает составляющую напряжения на клеммах электрической машины по прямой оси, и Vq - выражает ее составляющую напряжения по квадратурной оси.
 и
и  соответствуют составляющей по прямой оси и составляющей по квадратурной оси для искажений, выраженных в пространстве Парка, φƒ обозначает магнитный поток, создаваемый магнитами машины, и ωr обозначает скорость вращения магнитного поля машины.
соответствуют составляющей по прямой оси и составляющей по квадратурной оси для искажений, выраженных в пространстве Парка, φƒ обозначает магнитный поток, создаваемый магнитами машины, и ωr обозначает скорость вращения магнитного поля машины.
Параметры управления, на основании которых определяют составляющие напряжения по прямой оси и по квадратурной оси и затем управляющие напряжения, вычисляют при помощи выражения:
где Kd, Kid, Kq, Kiq являются заранее определенными постоянными коэффициентами усиления, и  и
и  , где
, где  является заданным значением составляющей тока по прямой оси, и
является заданным значением составляющей тока по прямой оси, и  является заданным значением составляющей тока по квадратурной оси.
является заданным значением составляющей тока по квадратурной оси.
Согласно другому варианту изобретения, предложен способ управления электромагнитным моментом трехфазной электрической машины с постоянными магнитами, включающий в себя измерение тока, поступающего на три фазы электрической машины, преобразование трех измеренных токов в составляющую тока по прямой оси и составляющую тока по квадратурной оси на основании преобразования трехфазных систем, получение двух заданных значений - для составляющей тока по прямой оси и составляющей тока по квадратурной оси в плоскости, связанной с преобразованием трехфазных систем, определение управляющих напряжений и управление напряжениями, подаваемыми на электрическую машину, отличающийся тем, что определение управляющих напряжений включает в себя изменение переменной, дающее управляющие переменные, регулирование параметров управления, вычисленных на основании системы уравнений, выраженной в зависимости от управляющих переменных, при этом система уравнений изолирует члены искажений, связанных с магнитным потоком, создаваемым магнитами ротора электрической машины, от членов, участвующих в электромагнитном моменте, и вычисление управляющих напряжений на основании составляющих напряжения по прямой оси и по квадратурной оси, определенных на основании параметров управления.
Другие преимущества и признаки изобретения будут более очевидны из нижеследующего описания не ограничительных варианта применения и варианта выполнения со ссылками на прилагаемые чертежи, на которых:
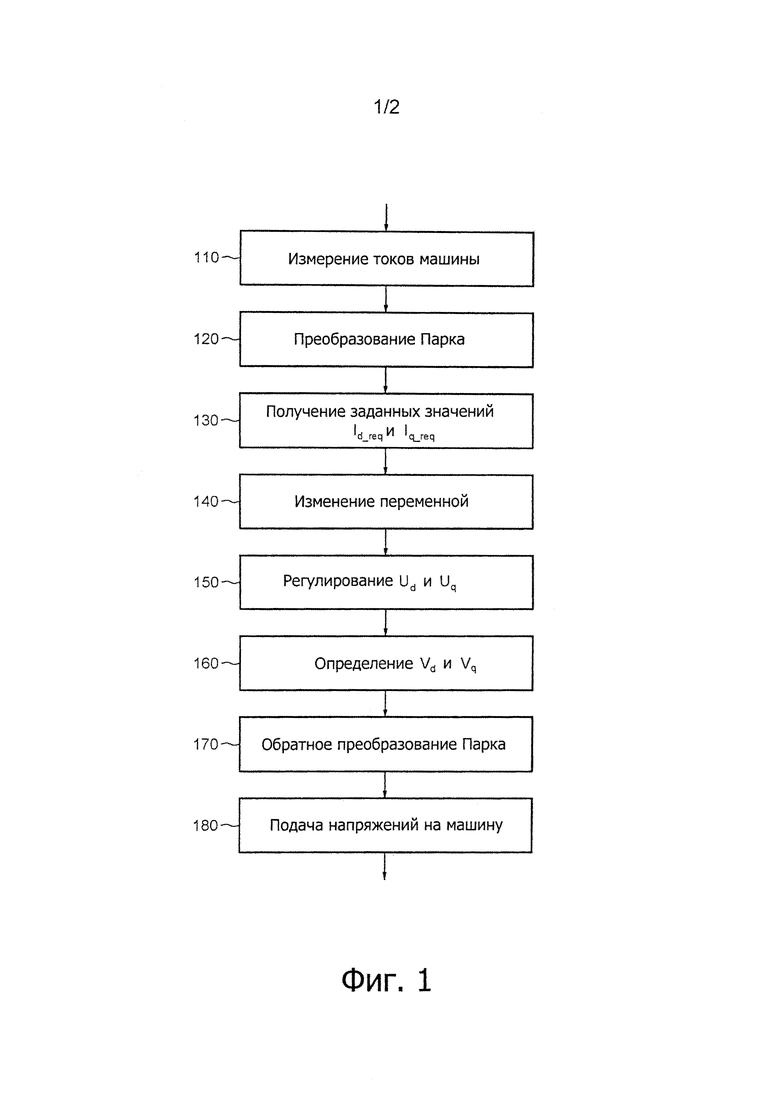
фиг. 1 - блок-схема способа управления электромагнитным моментом трехфазной электрической машины с постоянными магнитами согласно варианту применения;
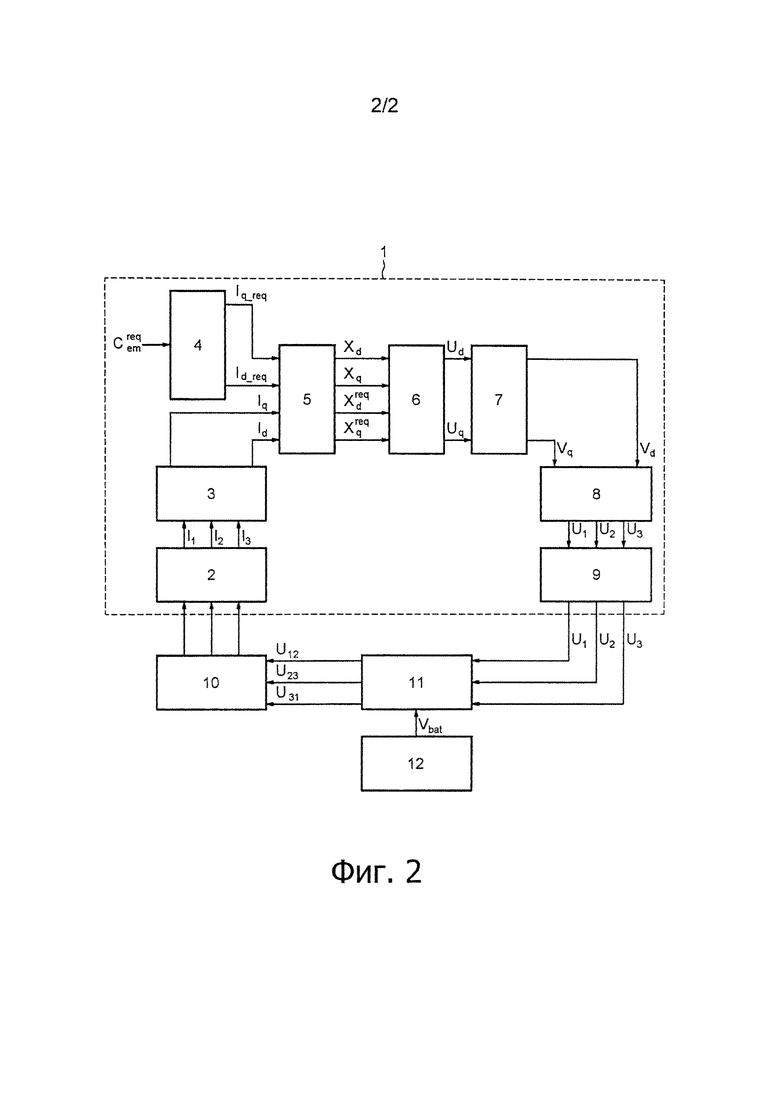
фиг. 2 - схема системы управления электромагнитным моментом трехфазной электрической машины с постоянными магнитами согласно варианту выполнения.
На фиг. 1 представлена блок-схема варианта применения способа управления электромагнитным моментом трехфазной электрической машины с постоянными магнитами.
На первом этапе 110 измеряют ток I1, I2, I3 для каждой из трех фаз трехфазной синхронной машины с постоянными магнитами.
На втором этапе 120 применяют преобразование Парка для трех измеренных токов I1, I2, I3, чтобы выразить ток, выдаваемый электрической машиной во вращающейся системе координат, в виде составляющей Id тока по прямой оси и составляющей Iq тока по квадратурной оси.
В пространстве Парка управляемой системой уравнений для синхронной машины является следующая система уравнений:

где Vd и Vq: напряжения, прикладываемые по двум осям, соответственно по прямой оси и по квадратурной оси, плоскости Парка электрической машины, Id и Iq: токи, протекающие в машине по двум осям, соответственно по прямой оси и по квадратурной оси, плоскости Парка, Rs: эквивалентное сопротивление статора машины, Ld и Lq: эквивалентные индуктивности по каждой оси, соответственно по прямой оси и по квадратурной оси, плоскости Парка машины, ωr: скорость вращения магнитного поля машины, которая соответствует скорости вращения ротора, умноженной на число пар плюсов машины, и φƒ: поток, создаваемый магнитами ротора.
Электромагнитный момент, создаваемый синхронной машиной, можно вычислить с помощью следующего выражения:

где Cem: электромагнитный момент, создаваемый машиной, p: число пар полюсов ротора машины, и φd и φq: составляющие создаваемого потока по осям, соответственно по прямой оси и по квадратурной оси, машины, которые можно выразить в виде:

В данном случае синхронная машина имеет симметрию между прямой осью и квадратурной осью в пространстве Парка, которая позволяет получить отличительное свойство Ld=Lq и, следовательно, записать:

В такой машине для управления моментом при максимальном ограничении джоулевых потерь, создаваемых составляющей Id тока по прямой оси, необходимо получить составляющую Id тока по прямой оси, максимально близкую к нулю, так как только составляющая Iq тока по квадратурной оси участвует в электромагнитном моменте.
На этапе 130 получают первое заданное значение  для составляющей Iq тока по квадратурной оси и второе заданное значение
для составляющей Iq тока по квадратурной оси и второе заданное значение  для составляющей Id тока по прямой оси в плоскости, связанной с преобразованием трехфазных систем.
для составляющей Id тока по прямой оси в плоскости, связанной с преобразованием трехфазных систем.
На следующем этапе 140 применяют измерение переменных, предположив, что:

что позволяет выразить систему управления (1) в виде:

Кроме того, учитывая, что Id Iq (Iq - Id) ≠ Id + Iq ≠ Xd ≠ Xq, то, предположив, что  и Uq=-Vd+Vq, можно записать:
и Uq=-Vd+Vq, можно записать:

где Ud и Uq: параметры управления, каждый из которых включает в себя соответственно эндогенные переменные, зависящие от переменных Xq, Xd или от их производной, позволяющие управлять электромагнитным моментом Cem, и экзогенные переменные Pq(t) или Pd(t), которые являются искажениями.
Поскольку переменные помех Pq(t) или Pd(t) являются экзогенными, система (7) позволяет осуществить частотную изоляцию помех по отношению к членам, управляющим электромагнитным моментом.
Таким образом, можно компенсировать помехи и регулировать электромагнитный момент, осуществляя на этапе 150 регулирование на параметрах управления Ud и Uq. Это регулирование позволяет сглаживать колебания тока, создаваемые электрической машиной. Кроме того, система уравнений (7) показывает, что регулирование параметров управления Ud и Uq происходит вне зависимости от режима двигателя электрической машины.
Значения параметров управления Ud и Uq вычисляют при помощи системы:

где Kd, Kid, Kq, Kiq являются заранее определенными постоянными коэффициентами усиления, и  и
и  .
.
На этапе 160 определяют значения составляющих напряжения Vd и Vq, которые прикладывают по двум осям, соответственно по прямой оси и по квадратурной оси, плоскости Парка электрической машины, на основании параметров управления Ud и Uq и матричной системы:

Затем на этапе 170 применяют обратное преобразование Парка на основании составляющих напряжения Vd и Vq по прямой оси и по квадратурной оси, чтобы получить значения управляющих напряжений U1, U2, U3 инвертора, подключенного между батареей питания автотранспортного средства и электрической машиной.
На финальном этапе 180 на клеммы электрической машины подают напряжения U12, U23, U31, генерируемые инвертором на основании однофазного напряжения Vbat батареи и значений управляющих напряжений U1, U2, U3.
На фиг. 2 показана система управления электромагнитным моментом трехфазной электрической машины с постоянными магнитами, в которой применяют заявленный способ управления, согласно варианту выполнения изобретения.
Система 1 управления электромагнитным моментом трехфазной синхронной машины 10 с постоянными магнитами содержит средства 2 измерения тока, поступающего на три фазы I1, I2, I3 электрической машины 10. Эти средства 2 измерения связаны со средствами 3 преобразования, позволяющими преобразовать три измеренных тока в составляющую Id тока по прямой оси и составляющую Iq тока по квадратурной оси при помощи преобразования Парка. Система 1 управления содержит также средства 4 преобразования, выполненные с возможностью преобразования заданного значения момента  в заданное значение
в заданное значение  для составляющей Iq тока по квадратурной оси и в заданное значение
для составляющей Iq тока по квадратурной оси и в заданное значение  для составляющей Id тока по прямой оси, и первые средства 5 изменения переменной, выполненные с возможностью определения новых переменных Xq и Xd тока и новых заданных значений
для составляющей Id тока по прямой оси, и первые средства 5 изменения переменной, выполненные с возможностью определения новых переменных Xq и Xd тока и новых заданных значений  и
и  на основании составляющих Id и Iq тока по прямой оси и по квадратурной оси и соответствующих заданных значений Iq_req и Id_req и при помощи уравнений:
на основании составляющих Id и Iq тока по прямой оси и по квадратурной оси и соответствующих заданных значений Iq_req и Id_req и при помощи уравнений:
 и
и

Система 1 управления содержит регулятор 6, выполненный с возможностью определения параметров управления Ud и Uq, каждый из которых содержит соответственно эндогенные переменные, зависящие от переменных Xq, Xd или от их производной и которые позволяют управлять электромагнитным моментом Cem, и экзогенную переменную Pq(t) или Pd(t), которая отображает искажения, связанные с потоком, создаваемым магнитами ротора, при этом каждый из параметров управления Ud и Uq выражают согласно системе (7) и вычисляют при помощи системы (8).
Система 1 управления содержит средства 7 определения составляющих напряжения Vd и Vq, прикладываемых по двум осям, соответственно по прямой оси и по квадратурной оси, плоскости Парка электрической машины, на основании параметров управления Ud и Uq и матричной системы (9).
Она содержит средства 8 обратного преобразования, выполненные с возможностью применения обратного преобразования Парка на основании составляющих Vd и Vq напряжения по прямой оси и по квадратурной оси, чтобы получить значения управляющих напряжений U1, U2, U3 инвертора 11, подключенного между батареей 12 питания автотранспортного средства и электрической машиной 10. Наконец, она содержит средства 9 управления, выполненные с возможностью управления инвертором 11 при помощи определенных значений управляющих напряжений U1, U2, U3.
Таким образом, изобретение позволяет управлять электромагнитным моментом электрической машины с постоянными магнитами, обеспечивая при этом стабильность токов в электрической машине, независимо от режима электрической машины.
Следует отметить, что специалист может легко применить изобретение для асимметричной электрической машины между прямой осью и квадратурной осью пространства Парка, то есть в которой Lq отличается от Ld, причем это применение можно осуществить, управляя равнозначно заданными значениями тока по этим двум осям, чтобы получить искомые крутящие моменты.
Изобретение относится к области электротехники и транспорта и может быть использовано для управления моментом трансмиссии автотранспортного средства, в частности гибридной трансмиссии автотранспортного средства, оборудованного двигателем внутреннего сгорания и приводной электрической машиной. Техническим результатом является обеспечение стабильности тока в электрической машине независимо от режима электрической машины. Система (1) управления электромагнитным моментом трехфазной электрической машины (10) с постоянными магнитами содержит средства (2) измерения токов, средства (3) транспонирования, выполненные с возможностью транспонирования трех измеренных токов в прямую составляющую (Id) и в квадратурную составляющую (Iq) тока на основании преобразования трехфазных систем, средства (4) преобразования, выполненные с возможностью преобразования заданного значения момента  в заданное значение (Ireq) для квадратурной составляющей (Iq) тока и в заданное значение (Ireq) для прямой составляющей (Id) тока, средства определения управляющих напряжений (U1, U2, U3) и средства (9) управления, выполненные с возможностью подачи определенных управляющих напряжений (U1, U2, U3) на электрическую машину (10). 3 н. и 5 з.п. ф-лы, 2 ил.
в заданное значение (Ireq) для квадратурной составляющей (Iq) тока и в заданное значение (Ireq) для прямой составляющей (Id) тока, средства определения управляющих напряжений (U1, U2, U3) и средства (9) управления, выполненные с возможностью подачи определенных управляющих напряжений (U1, U2, U3) на электрическую машину (10). 3 н. и 5 з.п. ф-лы, 2 ил.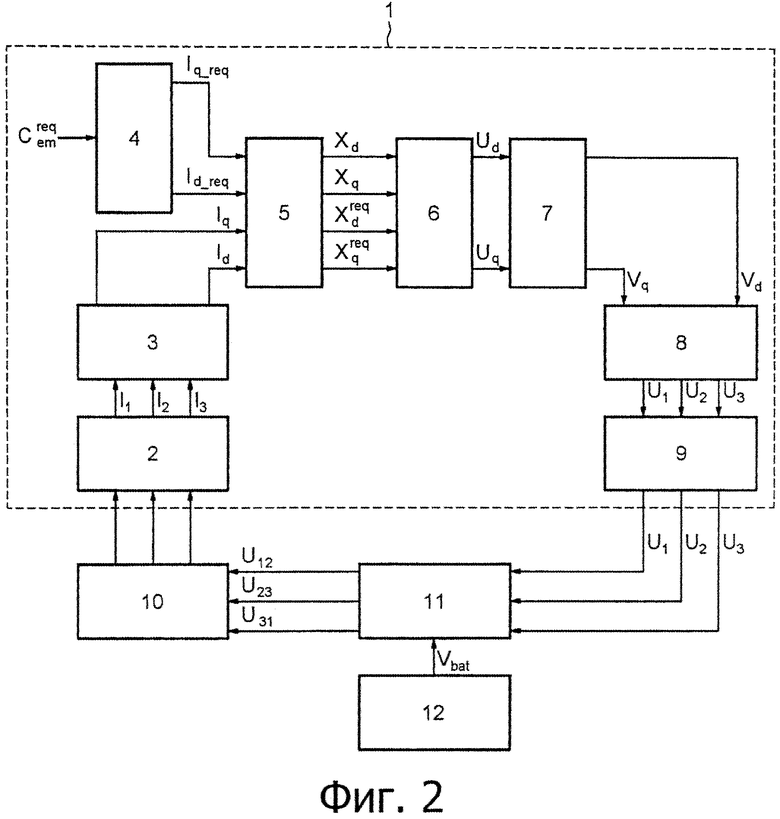
1. Система (1) управления электромагнитным моментом трехфазной электрической машины (10) с постоянными магнитами, содержащая средства (2) измерения тока, поступающего на три фазы машины (10), средства (3) преобразования, выполненные с возможностью преобразования трех измеренных токов в составляющую (Id) тока по прямой оси и составляющую (Iq) тока по квадратурной оси на основании преобразования трехфазных систем, средства (4) преобразования, выполненные с возможностью преобразования заданного значения момента  в заданное значение
в заданное значение  для составляющей (Iq) тока по квадратурной оси и в заданное значение
для составляющей (Iq) тока по квадратурной оси и в заданное значение  для составляющей (Id) тока по прямой оси, средства определения управляющих напряжений (U1, U2, U3) и средства (9) управления, выполненные с возможностью подачи определенных управляющих напряжений (U1, U2, U3) на электрическую машину (10), отличающаяся тем, что средства определения содержат первый вычислительный модуль (5), получающий указанные составляющие (Id, Iq) тока по прямой оси и по квадратурной оси, а также указанные заданные значения (Iq_req и Id_req), при этом первый вычислительный модуль (5) выполнен с возможностью применения изменения переменных и выдачи совокупности управляющих переменных (Xd, Xq, Xq_req, Xd_req) в модуль (6) регулирования, выполненный с возможностью выдачи параметров управления (Ud, Uq), вычисленных при помощи системы уравнений в зависимости от управляющих переменных (Xd, Xq, Xq_req, Xd_req) , при этом система уравнений изолирует члены искажений (Pd, Pq), связанные с потоком, создаваемым магнитами ротора электрической машины (10), от членов, участвующих в электромагнитном моменте, и второй вычислительный модуль (8), выполненный с возможностью вычисления управляющих напряжений (U1, U2, U3) на основании составляющих (Vd, Vq) напряжения по прямой оси и по квадратурной оси, определенных на основании параметров управления (Ud, Uq).
для составляющей (Id) тока по прямой оси, средства определения управляющих напряжений (U1, U2, U3) и средства (9) управления, выполненные с возможностью подачи определенных управляющих напряжений (U1, U2, U3) на электрическую машину (10), отличающаяся тем, что средства определения содержат первый вычислительный модуль (5), получающий указанные составляющие (Id, Iq) тока по прямой оси и по квадратурной оси, а также указанные заданные значения (Iq_req и Id_req), при этом первый вычислительный модуль (5) выполнен с возможностью применения изменения переменных и выдачи совокупности управляющих переменных (Xd, Xq, Xq_req, Xd_req) в модуль (6) регулирования, выполненный с возможностью выдачи параметров управления (Ud, Uq), вычисленных при помощи системы уравнений в зависимости от управляющих переменных (Xd, Xq, Xq_req, Xd_req) , при этом система уравнений изолирует члены искажений (Pd, Pq), связанные с потоком, создаваемым магнитами ротора электрической машины (10), от членов, участвующих в электромагнитном моменте, и второй вычислительный модуль (8), выполненный с возможностью вычисления управляющих напряжений (U1, U2, U3) на основании составляющих (Vd, Vq) напряжения по прямой оси и по квадратурной оси, определенных на основании параметров управления (Ud, Uq).
2. Система по п. 1, в которой электрическая машина (10) имеет симметрию между прямой осью и квадратурной осью плоскости преобразования трехфазных систем, позволяющую получать составляющую (Ld) эквивалентной индуктивности по прямой оси, по существу эквивалентную составляющей (Lq) эквивалентной индуктивности по квадратурной оси.
3. Система по п. 1 или 2, содержащая средства (3) преобразования, выполненные с возможностью применения преобразования Парка к измеренным токам для получения составляющей (Id) тока по прямой оси и составляющей (Iq) тока по квадратурной оси.
4. Автотранспортное средство, оборудованное электрической машиной, содержащей систему управления по одному из пп. 1-3.
5. Автотранспортное средство по п. 4, содержащее гибридную трансмиссию, дополнительно включающую в себя двигатель внутреннего сгорания.
6. Способ управления электромагнитным моментом трехфазной электрической машины (10) с постоянными магнитами, включающий измерение тока, поступающего на три фазы электрической машины (10), преобразование трех измеренных токов в составляющую (Id) тока по прямой оси и составляющую (Iq) тока по квадратурной оси на основании преобразования трехфазных систем, получение двух заданных значений (Iq_req и Id_req) для составляющей (Iq) тока по квадратурной оси и составляющей (Id) тока по прямой оси в плоскости, связанной с преобразованием трехфазных систем, определение управляющих напряжений (U1, U2, U3) и управление напряжениями, подаваемыми на электрическую машину (10), отличающийся тем, что определение управляющих напряжений (U1, U2, U3) включает в себя изменение переменной, обеспечивающее управляющие переменные (Xd, Xq, Xq_req, Xd_req), регулирование параметров управления (Ud, Uq), вычисленных на основании системы уравнений, выраженных в виде зависимости от управляющих переменных (Xd, Xq, Xq_req, Xd_req), при этом система уравнений изолирует члены искажений (Pd, Pq), связанных с потоком, создаваемым магнитами ротора электрической машины (10), от членов, участвующих в электромагнитном моменте, и вычисление управляющих напряжений (U1, U2, U3) на основании составляющих (Vd, Vq) напряжения по прямой оси и по квадратурной оси, определенных на основании параметров управления (Ud, Uq).
7. Способ по п. 6, в котором электрическая машина (10) имеет симметрию между прямой осью и квадратурной осью плоскости преобразования трехфазных систем, позволяющую получать составляющую (Ld) эквивалентной индуктивности по прямой оси, по существу эквивалентную составляющей (Lq) эквивалентной индуктивности по квадратурной оси.
8. Способ по п. 6 или 7, в котором указанное преобразование трехфазных систем является преобразованием Парка.
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СПОСОБ КОМПЛЕКСНОЙ ПЕРЕРАБОТКИ ТОПИСОЛНЕЧНИКА | 2009 |
|
RU2397671C1 |
| FR 2919772 A1, 06.02.2009 | |||
| DE 10219821 A, 20.11.2003 | |||
| JPS 5749384 A, 23.03.1982 | |||
| US 2011175556 A1, 21.07.2011 | |||
| EP 1868288 A, 14.10.2009. | |||

