Изобретение касается сопровождающей обслуживающей платформы для очень медленно движущегося монтажного узла крупногабаритных объектов.
Крупногабаритные объекты, в частности самолеты, во время их монтажа движутся очень медленно, чтобы достичь эффекта, аналогичного тому, который имеет место у более мелких объектов и при монтаже на поточной линии. При этом крупногабаритные объекты сопровождаются монтажной секцией, движущейся с такой же скоростью, что и крупногабаритный объект. Эта монтажная секция может быть временно закреплен на крупногабаритном объекте.
Задачей изобретения является создание сопровождающей платформы для обслуживания такой монтажной секции.
Эта задача решается с помощью сопровождающей платформы, указанной в п. 1 формулы изобретения.
Предлагаемая изобретением сопровождающая платформа предназначена для обслуживания монтажной секции, перемещающейся со скоростью, равной скорости крупногабаритного объекта, или закрепленной на крупногабаритном объекте при его монтаже, и содержит систему приводов для ее перемещения, выполненную с возможностью обеспечения ее быстроходного и медленного движения. Платформа также содержит средства для автоматического бесконтактного следования за монтажной секцией, выполненные с возможностью ручного режима управления следованием и автоматизированного режима управления следованием.
Вместо или дополнительно к монтажу крупногабаритного объекта монтажная секция может также служить для комплектации крупногабаритного объекта. Поэтому монтажная секция может также называться монтажной и/или комплектовочной секцией.
Монтажная секция движется очень медленно, т.е. предпочтительно медленнее чем 1 м в минуту и особенно предпочтительно примерно от 1 мм до 100 мм в минуту.
Система приводов включает предпочтительно также направляющие компоненты и поэтому может также называться системой приводов и направления.
Крупногабаритный объект представляет собой предпочтительно самолет.
Когда обслуживающая платформа имеет средства для бесконтактного следования за монтажной секцией, монтажная секция и вместе с тем система из крупногабаритного объекта и монтажной секции может оставаться механически, по меньшей мере, практически свободной от влияния сопровождающей платформы. То есть может достигаться, чтобы сопровождающая платформа, по меньшей мере, практически не создавала повышения нагрузки на возможные средства крепления, имеющиеся между крупногабаритным объектом и монтажной секцией.
Когда обслуживающая платформа имеет средства для автоматического следования за монтажной секцией, создана предпосылка для того, чтобы во время режима следования можно было обойтись без водителя, выполняющего эту задачу.
Предпочтительно средства включают устройства контроля, которые непрерывно контролируют положение сопровождающей платформы и монтажной секции относительно друг друга.
Особенно предпочтительно устройства контроля включают сенсоры расстояния и более предпочтительно сенсоры положения. В качестве сенсоров расстояния могут быть, например, предусмотрены ультразвуковые сенсоры, сенсоры индуктивного действия, лазерные сенсоры или радарные сенсоры. В качестве сенсоров положения могут быть предусмотрены сенсоры, которые регистрируют абсолютное положение, например, по контуру, то есть, например, лазерные сенсоры или радарные сенсоры.
Предпочтительно средства для автоматического бесконтактного следования за монтажной секцией включают центральный компьютер, в который предпочтительно передаются данные устройств контроля. Предпочтительно определенное с помощью устройств контроля положение сопровождающей доставочной платформы и монтажной секции относительно друг друга передается в центральный компьютер. Центральный компьютер предпочтительно рассчитывает по этой информации необходимую корректировку скорости и/или направления сопровождающей доставочной платформы. Он передает ее предпочтительно в систему приводов.
Если одно из зарегистрированных сенсорами значений превышает значение, заданное в данном случае в качестве допустимого предельного значения, предпочтительно происходит отключение всей системы сопровождающей платформы и особенно предпочтительно всей «поточной линии». То есть, когда одно из значений, зарегистрированных сенсорами сопровождающей платформы, превышает значение, заданное в данном случае в качестве допустимого предельного значения, движение крупногабаритного объекта и обслуживающей платформы предпочтительно останавливается, в частности во избежание столкновений.
Предпочтительно предусмотрены две отдельные сконструированные различным образом системы привода. То есть общая система приводов включает предпочтительно две сконструированные различным образом отдельные системы приводов. Под термином «отдельные системы приводов» в контексте этой публикации, в частности, подразумевается, что системы приводов не используют общие компоненты, а сконструированы совершенно отдельно. Этим учитывается то обстоятельство, что предпочтительно предполагаются два очень сильно отличающихся друг от друга требования к скорости движения сопровождающей платформы. Потому что, с одной стороны, сопровождающая платформа должна быть в состоянии двигаться так медленно, как крупногабаритный объект. То есть сопровождающая доставочная платформа может предпочтительно двигаться медленнее чем 1 м в минуту и совсем особо предпочтительно со скоростью от 1 мм до 200 мм в минуту. Эти две системы приводов предпочтительно могут использоваться независимо друг от друга.
Сопровождающая доставочная платформа имеет предпочтительно по меньшей мере одно приводное колесо и более предпочтительно по меньшей мере два приводных колеса.
Две системы приводов включают предпочтительно различные приводные колеса. Одна система приводов включает предпочтительно ровно одно другое приводное колесо или другие приводные колеса, чем другая система приводов.
Чтобы обеспечить быстрое обратное движение из конца монтажной линии в начало, сопровождающая платформа предпочтительно может, кроме того, двигаться с нормальной для средства напольного транспорта скоростью, то есть предпочтительно от 16 метров в минуту до 166 метров в минуту.
То есть сопровождающая платформа может предпочтительно двигаться по меньшей мере с двумя скоростями, которые предпочтительно находятся друг с другом в соотношении от 1 к 80 до 1 к 166000. Такой большой диапазон скорости или разность скорости не может покрываться диапазоном регулирования приводов или, по меньшей мере, с помощью стандартных компонентов.
Когда эти две такие различные скорости предпочтительно покрываются двумя различными, отдельными системами приводов, общая система привода, предпочтительным образом, может базироваться на стандартных компонентах. То есть предпочтительно эти две отдельные системы привода базируются на стандартных компонентах. Более предпочтительно эти две системы приводов включают стандартный одноколесный приводной механизм или базируются на нем.
Предпочтительно предусмотрена система приводов для экстренного движения, то есть, в частности, для обратного движения из конца монтажной линии в начало на большое расстояние. Эта система привода включает предпочтительно по меньшей мере один узел привода, имеющий привод, который включает приводное колесо, передачу, двигатель и тормоз. В одном из предпочтительных вариантов осуществления привод состоит из названных компонентов. Тормоз включает предпочтительно электромагнитный тормоз.
Предпочтительно система приводов для быстроходного движения (то есть приводная система быстроходного движения) включает по меньшей мере один узел привода и особенно предпочтительно точно два узла привода.
Термином «приводное колесо» в контексте этой публикации называется обод ведущего колеса или приводное колесо.
Предпочтительно предусмотрена система приводов для медленного привода, в частности для режима следования. В режиме следования сопровождающая платформа следует за крупногабаритным объектом, этот режим может также называться режимом сопровождения. Система приводов для медленного привода включает предпочтительно по меньшей мере один узел привода, имеющий приводное колесо, передачу, муфту сцепления предпочтительно электромагнитного действия, передачу с высоким передаточным отношением, двигатель и тормоз. В одном из вариантов осуществления узел приводов системы привода для медленного привода состоит из этих компонентов.
Система приводов для медленного привода (то есть приводная система медленного привода) включает предпочтительно по меньшей мере один узел привода и особенно предпочтительно ровно два узла привода.
Система привода для быстроходного движения включает предпочтительно по меньшей мере одно приводное колесо для быстроходного движения, а система привода для медленного привода включает более предпочтительно по меньшей мере одно отличающееся от него колесо для медленного привода.
Система приводов для быстроходного движения включает предпочтительно два приводных колеса для быстроходного движения, а система приводов для медленного привода включает более предпочтительно два отличающихся от них приводных колеса для медленного привода.
Когда общая система привода, как уже упомянуто, включает предпочтительно приводную систему для быстроходного движения и приводную систему медленного привода, создана предпосылка для того, чтобы сопровождающая платформа имела два рабочих режима, а именно быстроходное движение и режим следования. Эти режимы предпочтительно становятся возможными следующим образом.
При быстроходном движении сопровождающая платформа предпочтительно движется посредством системы приводов для быстроходного движения, а указанный по меньшей мере один узел привода системы приводов для медленного привода движется одновременно вхолостую, как неприводное несущее колесо. Для защиты находящихся за муфтой сцепления компонентов этого узла привода (передачи с высоким передаточным отношением, двигателя, тормоза) от высоких частот вращения эти компоненты предпочтительно отсоединяются посредством муфты.
При режиме следования тормоз указанного по меньшей мере одного узла привода системы приводов для быстроходного движения предпочтительно отпущен, и этот узел привода более предпочтительно движется одновременно вхолостую, как неприводное несущее колесо. Теперь привод осуществляется посредством системы приводов для медленного привода, у которой в этом режиме работы муфта сцепления сцепляет передачу с ранее отсоединенными компонентами.
Таким образом, предпочтительно привод сопровождающей платформы может осуществляться выборочно посредством системы приводов для быстроходного движения или посредством системы приводов для медленного привода. При этом только указанный по меньшей мере один узел привода системы приводов для медленного привода имеет муфту сцепления, которая отсоединяет компоненты этого узла привода во время активного применения системы приводов для быстроходного движения. Потому что оказалось, что система приводов для быстроходного движения не страдает, когда во время медленного привода она пассивно совершает одновременное движение без отсоединения компонентов этой системы с помощью муфты.
Каждый узел привода предпочтительно обладает возможностью направления.
Предпочтительно сопровождающая платформа имеет полностью автоматизированный режим управления и более предпочтительно также ручной режим управления. При этом рабочий режим быстроходного движения осуществляется предпочтительно в ручном режиме управления. Рабочий режим следования, в котором сопровождающая обслуживающая платформа следует за монтажной секцией, осуществляется предпочтительно в полностью автоматизированном режиме управления.
Предпочтительно сопровождающая платформа включает грузовой подъемник. В этом варианте осуществления сопровождающая доставочная платформа может быть выполнена в виде самодвижущегося сопровождающего грузового подъемника.
Задачей изобретения является также создание монтажной колонны для очень медленно движущихся крупногабаритных объектов.
Эта задача решается с помощью монтажной колонны, указанной в п. 8 формулы изобретения.
Таким образом, изобретение включает также монтажную колонну для очень медленно движущихся крупногабаритных объектов, имеющую монтажную секцию и сопровождающую платформу по одному из описанных выше вариантов осуществления. Монтажная колонна может представлять собой монтажную и/или комплектовочную колонну.
Предпочтительно монтажная секция закреплена на крупногабаритном объекте. То есть монтажная секция имеет предпочтительно средства крепления для крепления на крупногабаритном объекте. Благодаря этому без дополнительных мер обеспечивается следование монтажной секции за крупногабаритным объектом по скорости и направлению.
Предпочтительно средства сопровождающей платформы для автоматического бесконтактного следования за монтажной секцией включают устройства контроля. На монтажной секции предпочтительно расположены устройства, с которыми взаимодействуют эти устройства контроля.
Эти устройства включают предпочтительно метки для сенсоров. Кроме того, на монтажной секции предпочтительно предусмотрены средства грубой ориентации для водителя. Метки для сенсоров и средства грубой ориентации для водителя предпочтительно расположены на одном общем элементе на монтажной секции, а именно позиционирующем вспомогательном устройстве.
Метки сенсоров могут включать рефлекторы, и/или отверстия, и/или светлые области.
Средства грубой ориентации могут включать распознаваемые глазом знаки, например расположенные на монтажной секции стрелки, которые указывают правильную ориентацию обслуживающей платформы относительно монтажной секции. Средства грубой ориентации могут также указывать правильную ориентацию частей или областей, например наружных кромок обслуживающей платформы относительно монтажной секции.
Средства грубой ориентации могут включать светлые области, которые позволяют водителю распознавать, когда на них находится лазерный луч сенсора.
Теперь надо пояснить изобретение подробнее на одном из примеров осуществления, показанном на чертежах. Показано:
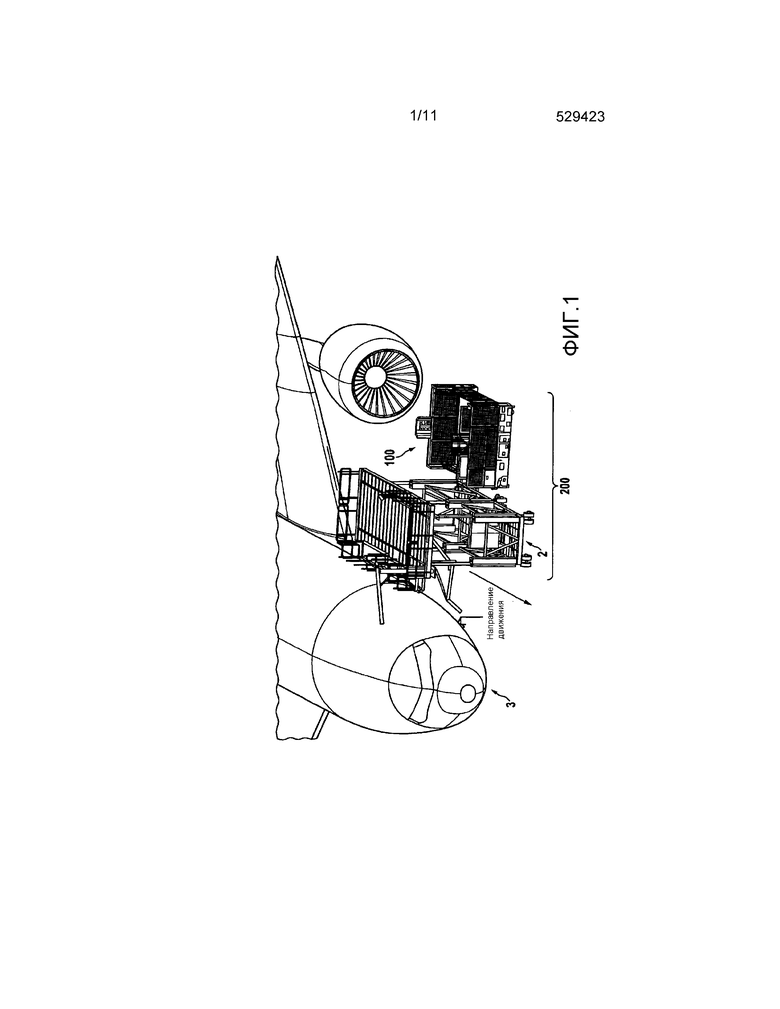
фиг. 1: изображение в перспективе крупногабаритного объекта, на котором закреплена монтажная секция, за которым следует предлагаемая изобретением сопровождающая платформа;
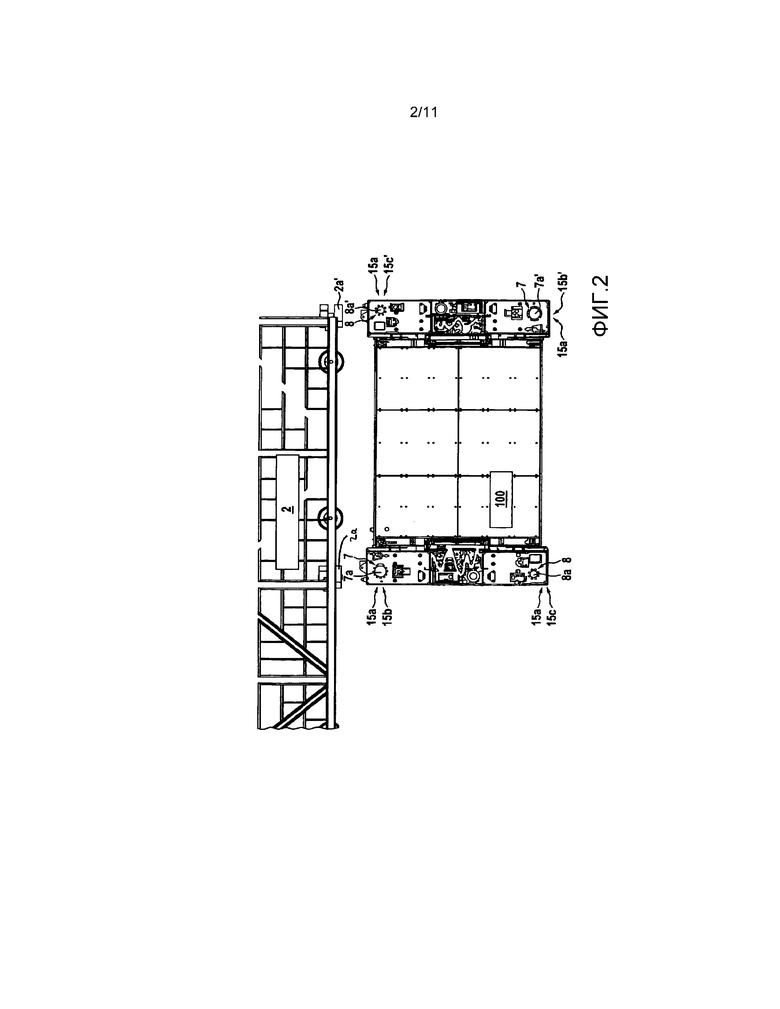
фиг. 2: вид сверху сопровождающей платформы и части монтажной секции;
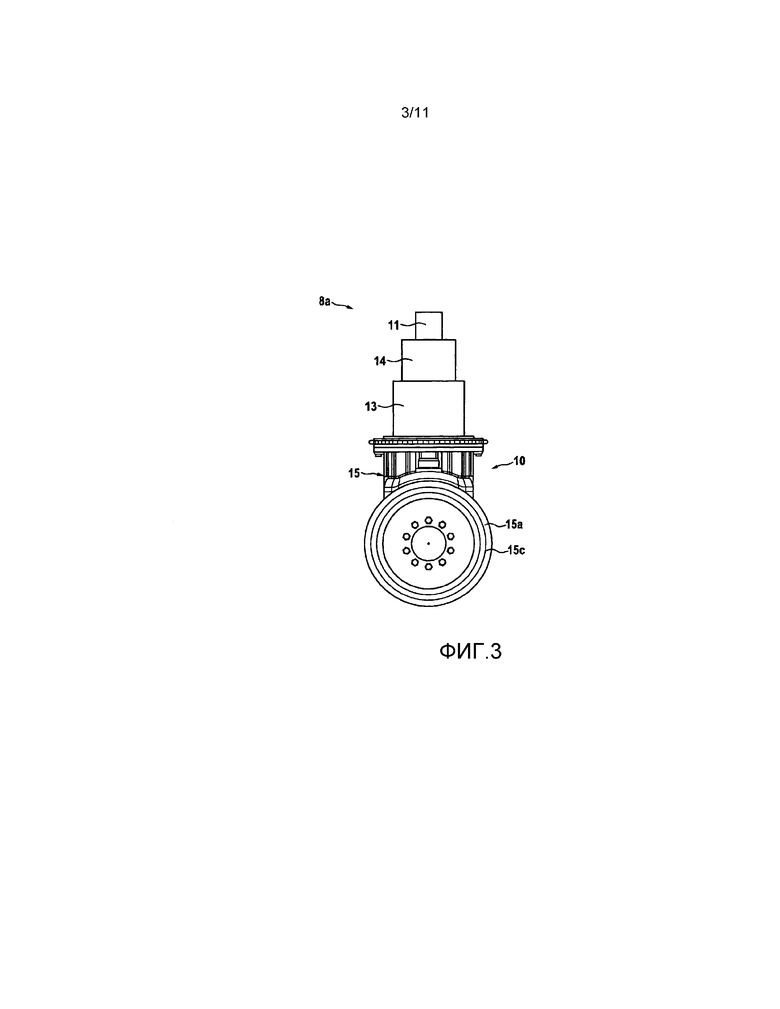
фиг. 3: вид спереди части системы приводов для режима следования;
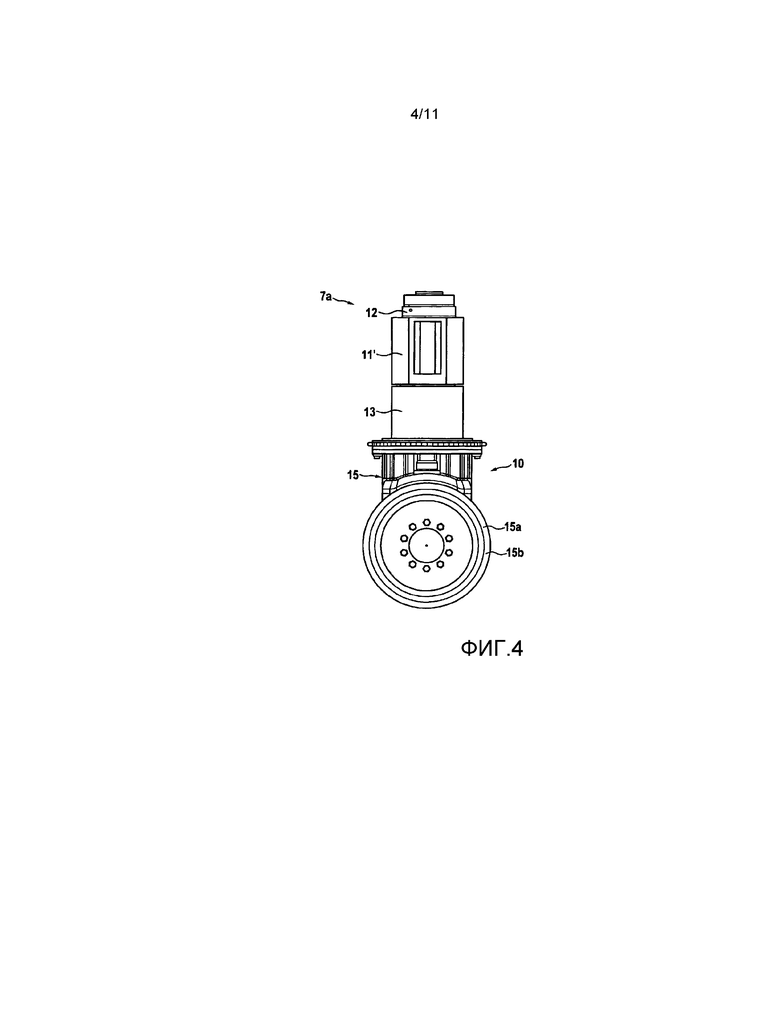
фиг. 4: вид части системы приводов для быстроходного движения;
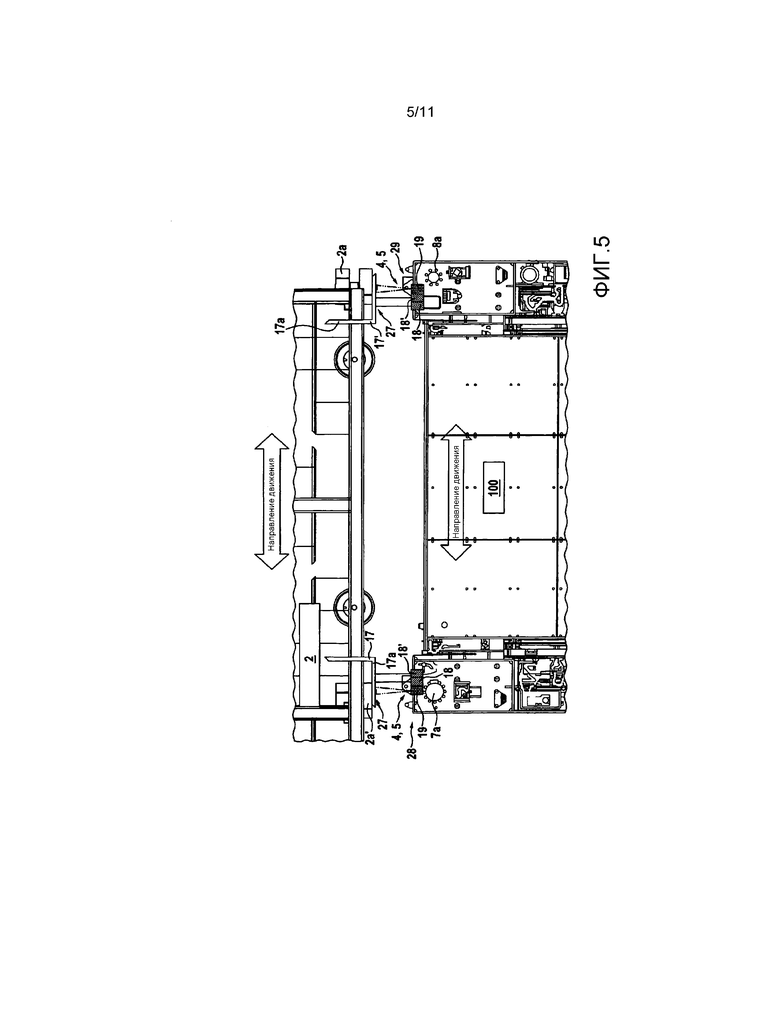
фиг. 5: вид сверху части сопровождающей платформы и монтажного узла;
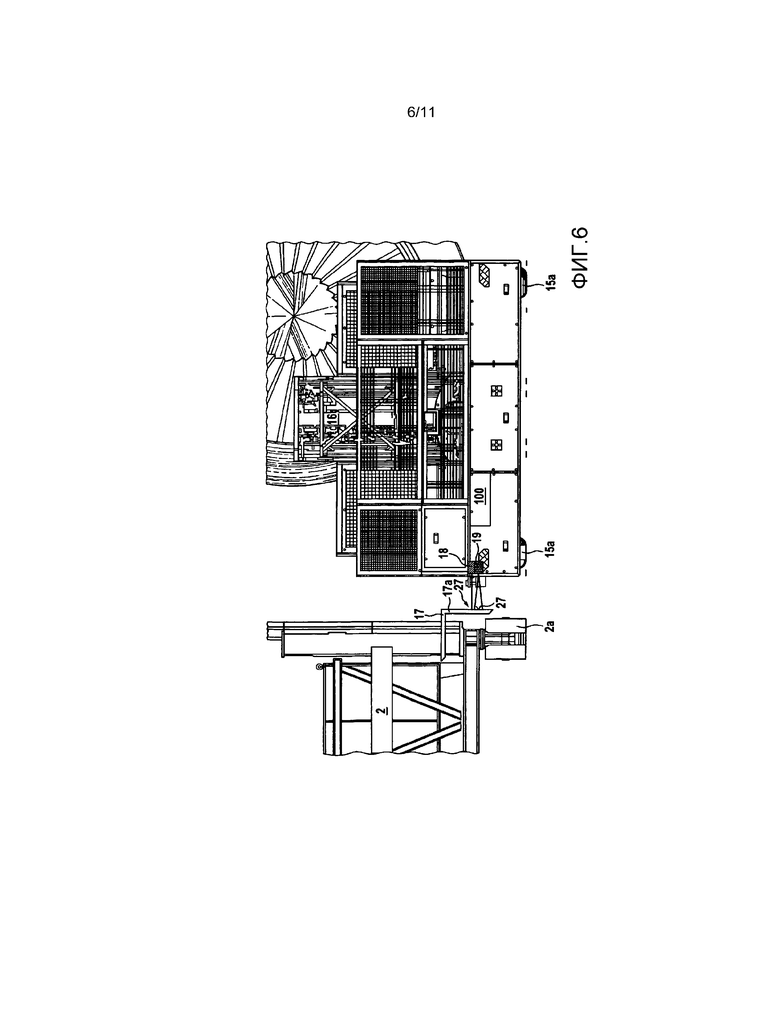
фиг. 6: вид сбоку сопровождающей обслуживающей платформы и части монтажной секции;
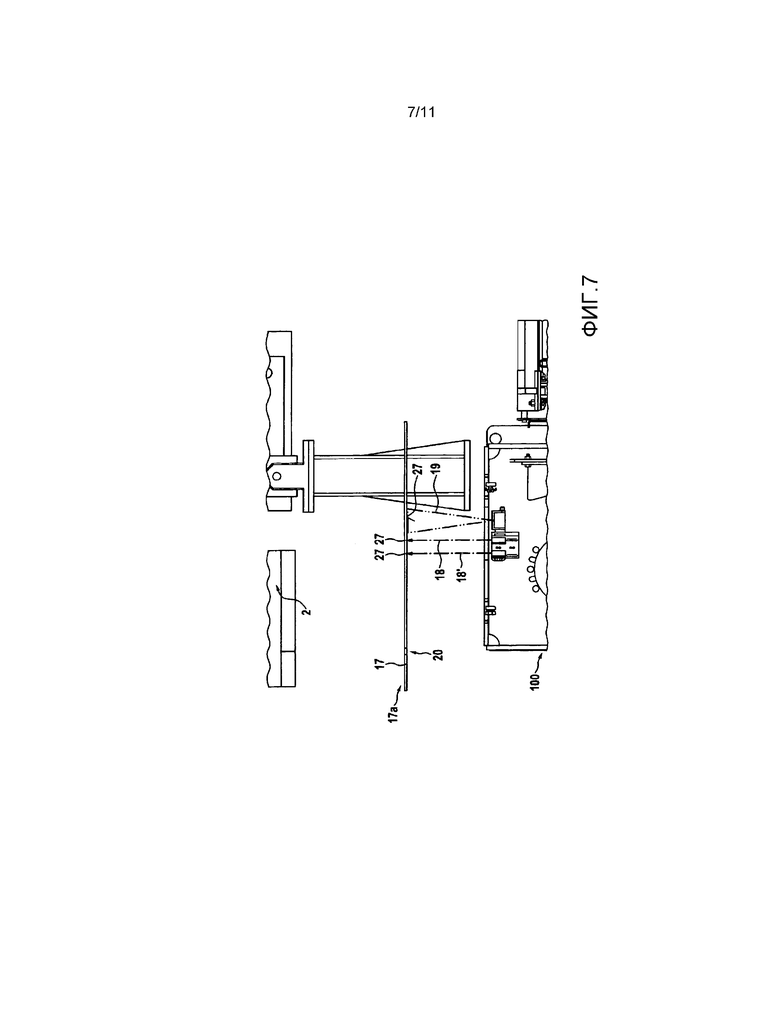
фиг. 7: детальный вид сверху части сопровождающей платформы и монтажной секции;
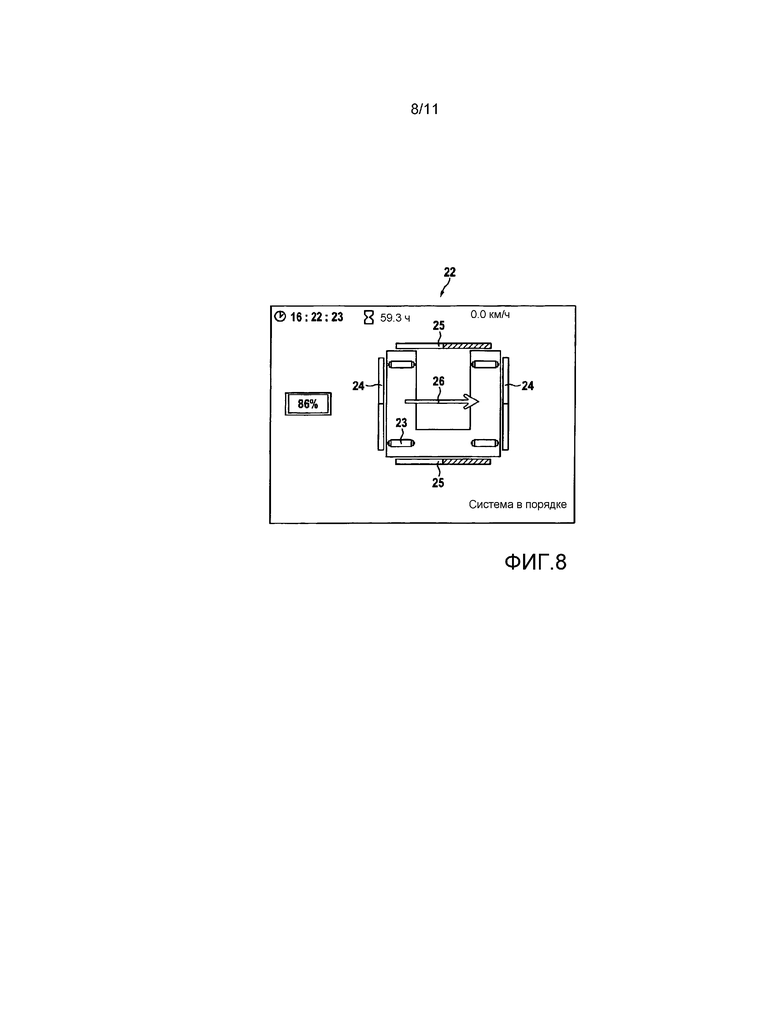
фиг. 8: изображение одного из указателей сопровождающей платформы, который облегчает пользователю грубую ориентацию сопровождающей платформы относительно монтажной секции;
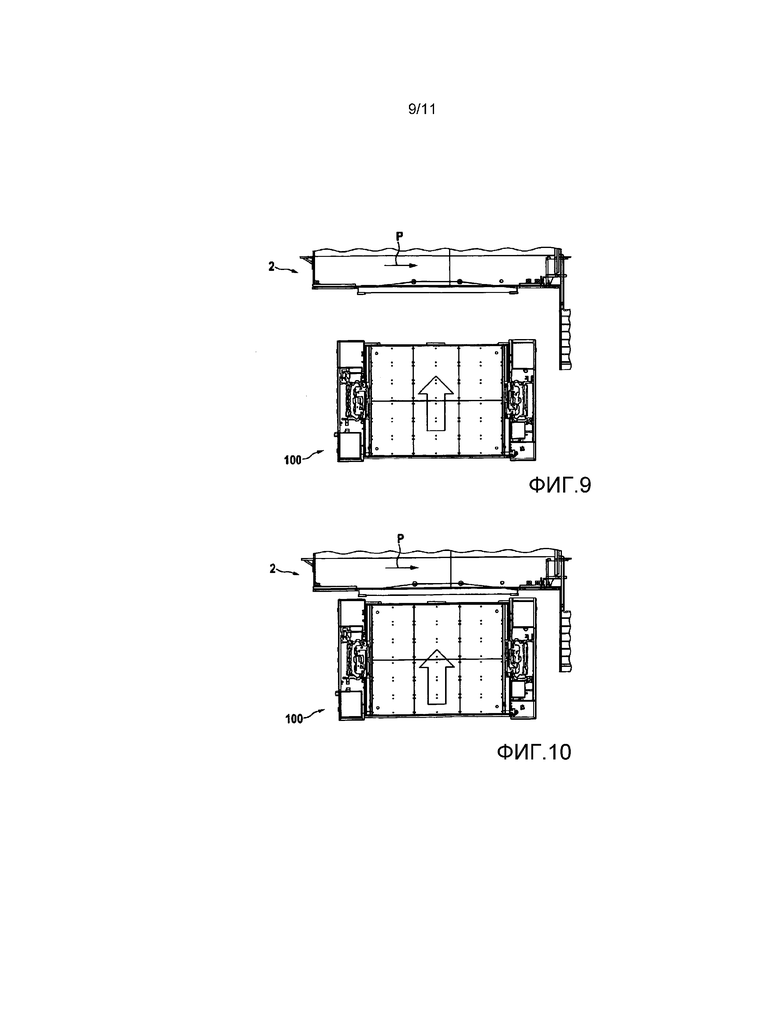
фиг. 9, 10: приближение сопровождающей платформы к монтажной секции на виде сверху;
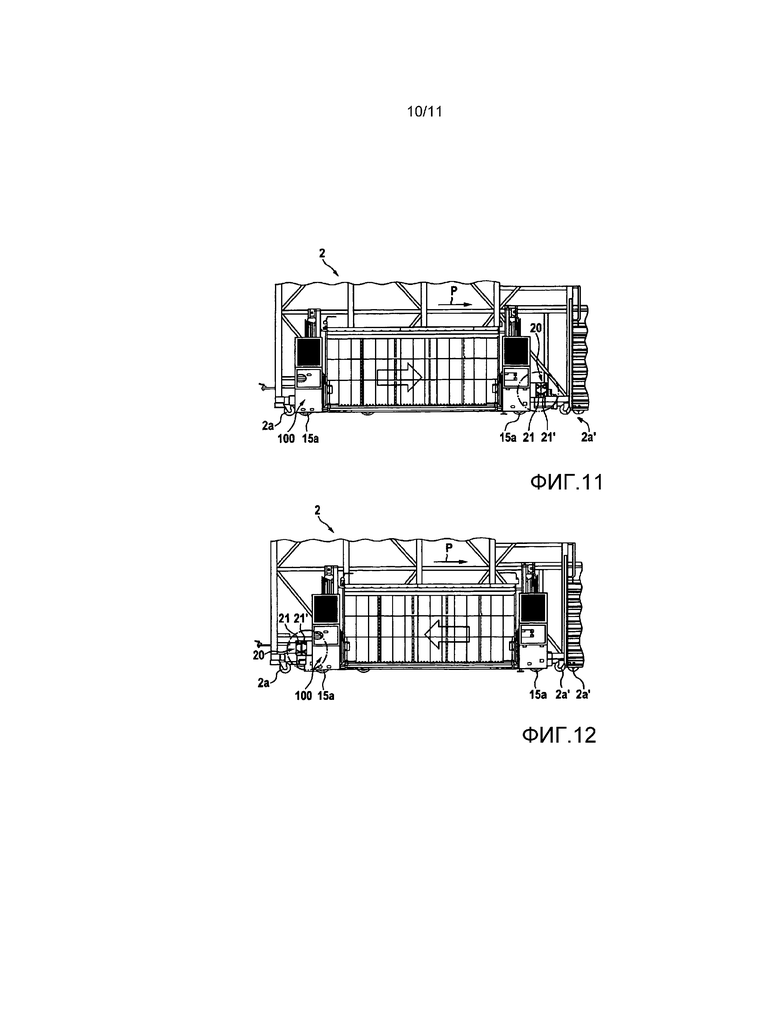
фиг. 11, 12: грубая ориентация сопровождающей платформы относительно монтажной секции на виде сбоку;
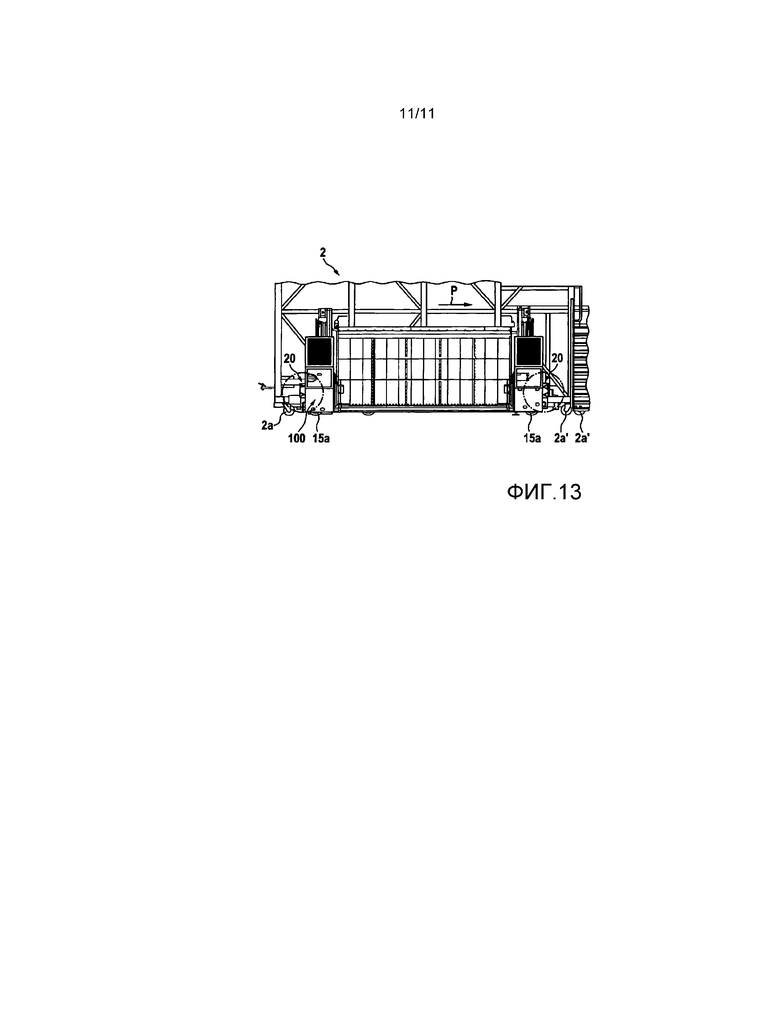
фиг. 13: изображение как на фиг. 11 и фиг. 12, однако после осуществленной грубой ориентации.
На фиг. 1 показана обозначенная в целом позицией 100 сопровождающая платформа в режиме следования. Монтажная секция 2 закреплена на крупногабаритном объекте, то есть самолете. Крупногабаритный объект 3 и монтажная секция 2 движутся с одинаковой очень низкой скоростью, например от 1 мм до 100 мм в минуту. Сопровождающая платформа 100 следует за монтажной секцией 2 по скорости и направлению, не касаясь его. Поэтому сопровождающая платформа 100 не нагружает средства крепления между монтажной секцией 2 и крупногабаритным объектом 3.
Для реализации бесконтактного следования сопровождающая платформа 100 имеет общую систему 1 приводов, которая, со своей стороны, имеет две отдельные сконструированные различным образом системы 7, 8 приводов. Одна система 7 приводов включает иные приводные колеса 15a, чем другая система 8 приводов.
Сопровождающая платформа 100 в показанном примере осуществления имеет четыре колеса. Каждое колесо является приводным, так что предусмотрены четыре приводных колеса 15a. Как показано на фиг. 2, система приводов для быстроходного движения 7 и система приводов для режима 8 следования включают по два узла 7a, 7aʹ, 8a, 8aʹ привода, а на фиг. 3 и 4 показано, что каждый узел 8a, 7a привода включает ровно одно приводное колесо 15a. При этом два узла привода каждой системы 7, 8 приводов расположены диагонально, то есть в противолежащих наискосок углах сопровождающей платформы 100.
Система приводов для быстроходного движения 7 включает два приводных колеса 15b, 15bʹ для быстроходного движения, а система приводов для режима 8 следования включает два отличающихся от них приводных колеса 15c, 15cʹ для медленного привода.
На фиг. 3 показана конструкция одного из двух узлов 8a привода системы 8 приводов для режима следования. Этот узел 8a привода в показанном примере осуществления состоит из приводного колеса 15a, передачи 10, электромагнитной муфты 13 сцепления, передачи 14 с высоким передаточным отношением, двигателя 11 и тормоза.
Показанный на фиг. 4 узел 7a привода для быстроходного движения включает привод, состоящий из приводного колеса 15a, передачи 10, двигателя 11ʹ и электромагнитного тормоза 12. Кроме того, предусмотрена электрическая муфта 13 сцепления. Таким образом, оба узла привода обеих систем привода собраны преимущественно из стандартных компонентов.
Чтобы иметь возможность автоматического бесконтактного следования за монтажной секцией 2, сопровождающая платформа 100 имеет средства 4, которые включают устройства 5 контроля. Устройства 5 контроля непрерывно контролируют положение сопровождающей платформы 100 и монтажной секции 2 относительно друг друга. Устройства 5 контроля включают сенсоры 18, 18ʹ расстояния и сенсоры 19 положения. На фиг. 5 показано схематичное расположение этих сенсоров положения/расстояния.
Чтобы иметь возможность определять положение двух областей сопровождающей платформы 100 и вместе с тем положение всей сопровождающей платформы 100 относительно монтажной секции 2, в двух разных областях сопровождающей платформы 100 предусмотрены сенсоры 18, 18ʹ, 19. В каждой области 28, 29 сенсоров сопровождающей платформы 100 в показанном примере осуществления расположены два сенсора 18, 18ʹ расстояния. Сенсоры 18, 18ʹ расстояния включены редундантно. Таким образом, в каждой области 28, 29 сенсоров предусмотрен редундантный сенсор 18 расстояния. Благодаря этому надежно предотвращается столкновение сопровождающей платформы 100 с монтажной секцией 2. Сенсоры 18 расстояния регулируют направление сопровождающей платформы 100. В каждой области 28, 29 сенсоров сопровождающей платформы 100 предусмотрен, кроме того, сенсор 19 положения. Этот сенсор регулирует скорость сопровождающей платформы 100.
На фиг. 8 показан дисплей, который облегчает водителю сопровождающей платформы 100 ее грубую ориентацию относительно монтажной секции 2, т.е. ориентацию таким образом, чтобы сенсоры 18, 19 с помощью центрального компьютера могли выполнять дальнейшее управление сопровождающей платформой 100. Таким образом, показанный на фиг. 8 дисплей облегчает переход из ручного режима управления в полностью автоматизированный режим управления. Для этой цели предусмотрены два параллельно друг другу указателя 24 положения, которые указывают параллельность сопровождающей платформы 100 относительно монтажной секции 2. Перпендикулярно к ним предусмотрены два других, тоже расположенных параллельно друг другу указателя 25 положения, которые указывают центральность сопровождающей платформы 100 относительно монтажной секции 2. При этом заштрихованная область последних названных указателей 25 положения вместе со стрелкой 26 обозначает требование к водителю двигать транспортное средство соответственно направлению убывания. Когда эти заштрихованные области, как у указателей 24 положения, которые указывают параллельность, малы, это означает, что положение сопровождающей платформы 100 в этом направлении правильное.
На фиг. 9-13 показаны пять шагов грубой ориентации сопровождающей платформы 100 относительно монтажной секции 2. Это грубая ориентация совершается в ручном режиме управления, т.е. водителем сопровождающей платформы 100. На фиг. 9 и 10 показано приближение сопровождающей платформы 100 к монтажной секции 2, до тех пор пока не будет достигнуто желаемое расстояние. После этого корректируется положение сопровождающей платформы 100 в направлении движения, которое на фиг. 9-11 обозначено стрелкой P. Это происходит с помощью средств 20 грубой ориентации, которые включают стрелки 21, 21ʹ, указывающие водителю правильное положение передней и задней кромки сопровождающей платформы относительно монтажной секции 2. При этом на фиг. 11 показано положение, в котором сопровождающая платформа 100 расположена со слишком большим смещением влево, в то время как на фиг. 12 показано положение, в котором сопровождающая платформа 100 расположена со слишком большим смещением вправо. На фиг. 13 показана правильная ориентация. В ней осуществляется переключение из ручного режима управления в полностью автоматизированный режим управления, в котором сопровождающая платформа 100 автоматически бесконтактно следует за монтажной секцией 2.
На фиг. 1 показана также монтажная колонна 200, которая включает монтажную секцию 2 и сопровождающую платформу 100.
На монтажной секции 2, как это подробнее показано на фиг. 5, расположены устройства 17, с которыми взаимодействуют устройства 5 контроля монтажной секции 2. Устройства 17, 17ʹ включают для каждой области 28, 29 сенсоров сопровождающей платформы 100 ровно одно позиционирующее вспомогательное устройство 17a. На нем расположены метки 27 для сенсоров, которые могут быть выполнены в виде отверстий, рефлекторов или светлых областей.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
100 Сопровождающая платформа
200 Монтажная колонна
1 Общая система приводов
2 Монтажная секция
2a, 2aʹ Колеса
3 Крупногабаритный объект
4 Средства
5 Устройства контроля
6 –
7 Система привода для быстроходного движения или, соответственно, нормального движения
7a, 7aʹ Узел привода для быстроходного движения или, соответственно, нормального движения
8 Система приводов для режима следования
8a, 8aʹ Узел привода для режима следования
9 –
10 Передача
11 Двигатель или, соответственно, приводной двигатель
11ʹ Приводной двигатель
12 Тормоз
13 Муфта сцепления
14 Передача с высоким передаточным отношением или, соответственно, зубчатая передача
15 Одноколесный приводной механизм
15a Приводные колеса
15b, 15bʹ Приводные колеса для быстроходного движения
15c, 15cʹ Приводные колеса для медленного привода
16 Грузовой подъемник
17, 17ʹ Устройства
17a Позиционирующее вспомогательное устройство
18, 18ʹ Сенсор расстояния
19 Сенсор положения
20 Средства грубой ориентации
21, 21ʹ Стрелки
22 Указатель
23 Указатель положения обода
24 Указатель положения по параллельности
25 Указатель положения по центральности
26 Указание движения (стрелка)
27 Метки для сенсоров
28, 29 Области сенсоров
P Стрелка
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ РОБОТ | 2011 |
|
RU2492620C2 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2023 |
|
RU2813217C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2021 |
|
RU2790940C1 |
| Способ и система для замедления транспортного средства | 2017 |
|
RU2717608C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕОРИЕНТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2252165C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2018 |
|
RU2731683C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДВИЖЕНИЯ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2011 |
|
RU2480361C1 |
Изобретение относится к области монтажа крупногабаритных объектов (3), например самолетов. Сопровождающая платформа (100) для обслуживания монтажной секции (2), закрепленной на крупногабаритном объекте (3) при его монтаже или движущейся за ним, содержит систему (1) приводов для ее перемещения, выполненную с возможностью обеспечения ее быстроходного и медленного движения, и средства (4) для автоматического бесконтактного следования за монтажной секцией (2), выполненные с возможностью автоматизированного режима управления следованием и ручного режима управления следованием. При этом упомянутые средства (4) содержат устройства (5) для непрерывного контроля положения упомянутых платформы (100) и монтажной секции (2) относительно друг друга. Использование изобретения позволяет обеспечить точное сопровождение обслуживающей платформой (100) монтажной секции (2). 2 н. и 8 з.п. ф-лы, 13 ил.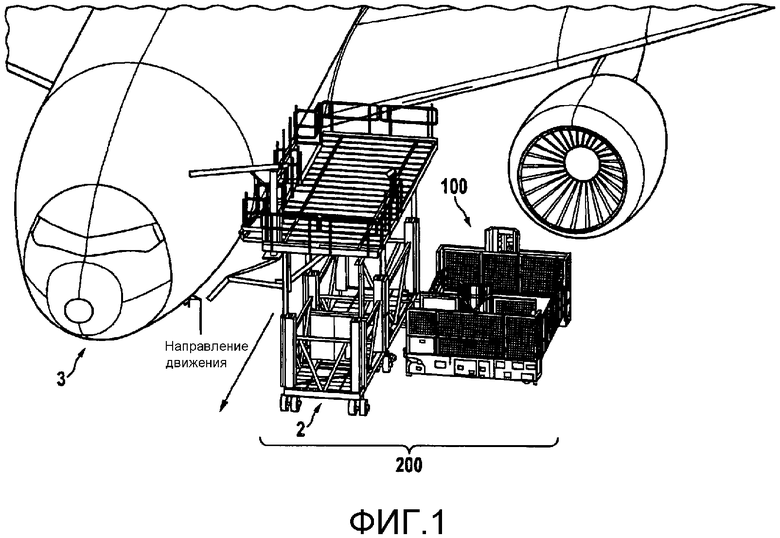
1. Сопровождающая платформа (100) для обслуживания монтажной секции (2), закрепленной на крупногабаритном объекте (3) при его монтаже или перемещающейся за крупногабаритным объектом (3) при его монтаже со скоростью, равной скорости крупногабаритного объекта (3), содержащая систему (1) приводов для ее перемещения, выполненную с возможностью обеспечения ее быстроходного и медленного движения, и средства (4) для автоматического бесконтактного следования за монтажной секцией (2), выполненные с возможностью ручного режима управления следованием и автоматизированного режима управления следованием.
2. Сопровождающая платформа по п. 1, отличающаяся тем, что средства (4) содержат устройства (5) для непрерывного контроля положения платформы (100) и монтажной секции (2) относительно друг друга.
3. Сопровождающая платформа по п. 2, отличающаяся тем, что устройства (5) контроля включают сенсоры (18, 18ʹ) расстояния и сенсоры (19) положения.
4. Сопровождающая платформа по любому из пп. 1-3, отличающаяся тем, что средства (4) содержат центральный компьютер, выполненный с возможностью приема от устройств (5) контроля определенного ими положения платформы (100) и монтажной секции (2) относительно друг друга и расчета по этой информации необходимых корректировок скорости и направления движения платформы (100) с передачей их в систему (1) приводов.
5. Сопровождающая платформа по любому из пп. 1-3, отличающаяся тем, что система (1) приводов содержит два отдельных различных привода (7, 8), каждый из которых связан со своим отдельным приводным колесом или со своими отдельными приводными колесами (15а).
6. Сопровождающая платформа по п. 5, отличающаяся тем, что один из приводов (7) выполнен в виде приводного колеса (15a), муфты (13) сцепления, двигателя (11) и тормоза (12) с возможностью обеспечения быстроходного движения платформы (100) в режиме перестановочного перемещения, а другой привод (8) – в виде приводного колеса (15a), муфты (13) сцепления, механической передачи (14), двигателя (11) и тормоза с возможностью обеспечения медленного движения платформы (100) в режиме следования за монтажной секцией (2).
7. Сопровождающая платформа по любому из пп. 1-3, отличающаяся тем, что она снабжена грузовым подъемником (16).
8. Монтажная колонна (200), содержащая сопровождающую платформу (100) по любому из пп. 1-7 и монтажную секцию (2), выполненную с возможностью закрепления на крупногабаритном объекте (3).
9. Монтажная колонна по п. 8, отличающаяся тем, что она снабжена расположенными на монтажной секции (2) устройствами (17, 17ʹ) для взаимодействия с устройствами (5) контроля.
10. Монтажная колонна по п. 9, отличающаяся тем, что устройства (17, 17ʹ) содержат метки (27) для сенсоров и средства (20) грубой ориентации для водителя, расположенные на одном общем позиционирующем вспомогательном устройстве (17a), установленном на монтажной секции (2).
| EP 1829642 A1, 05.09.2007 | |||
| КОНВЕЙЕР ДЛЯ ТЕХНОЛОГИЧЕСКИХ ОПЕРАЦИЙ | 1992 |
|
RU2034761C1 |
| ПОДЪЕМНО-ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU175827A1 |
| JPH 09290330 A, 11.11.1997 | |||
| US 6591488 B1, 15.07.2003 | |||
| US 6226848 B1, 08.05.2001. | |||

