Изобретение относится к конвейерному транспорту, в частности к конвейерам с подводом электроэнергии к транспортируемым изделиям, например аудивидеоаппаратуре и другим видам электронной аппаратуры.
Известен конвейер для технологических операций над изделиями, содержащий ведущие и ведомые звездочки, охватывающие их тяговые цепи с роликами, грузонесущие платформы с токосъемными шинами, систему токоподвода с токоподводящими шинами и с токоподводящими пластинами на рычагах, и механизмы загрузки и разгрузки конвейера [1] Недостатком известного конвейера является наличие открытых токоподводящих шин, что требует особой осторожности при проведении пусконаладочных, ремонтных и регламентных работ, а также при съеме неисправных изделий, кроме того, загрязнение шин в ходе эксплуатации может привести к потере контакта.
Цель изобретения повышение электробезопасности и надежности работы конвейера за счет того, что шины закрыты кожухом из электроизоляционного материала, а напряжение подается только на те рычаги с токоподающими пластинами, чьи датчики взаимодействуют с грузонесущими платформами и отсутствует возможность загрязнения токоподводящих элементов.
Достигается это тем, что каждая из токоподводящих шин закрыта кожухом из электроизоляционного материала и снабжена клеммами, а система токоподвода включает в себя датчики, установленные с возможностью взаимодействия их с грузонесущими платформами, при этом токоподающие пластины на рычагах подключены к соответствующим клеммам на токоподводящих шинах посредством указанных датчиков, кроме того, клеммы на токоподводящих шинах установлены с шагом, соответствующим шагу размещения рычагов с токоподводящими пластинами.
Существенными признаками, отличающими заявляемое техническое решение от прототипа и обусловливающими новизну, являются:
1. Защита каждой из токоподводящих шин кожухом из электроизоляционного материала и снабжение их клеммами, подключение каждой пары пластин на рычагах и клеммах посредством рычага, имеющего возможность взаимодействия с грузонесущей платформой, что позволяет исключить возможность контактирования оператора с открытыми токоведущими частями конструкции, так как токоподводящие шины изолированы кожухом, а на токоподающие пластины напряжение подается лишь тогда, когда грузонесущая платформа взаимодействует с датчиком, при этом токоподводящие пластины перекрыты данной платформой. Возможность применения пайки или зажимов при подсоединении одних токоподводящих элементов к другим, а также самозачистка токоподающих пластин при взаимодействии с грузонесущей платформой повышает надежность передачи электроэнергии к каждому изделию.
2. Установка клемм на токоподводящих шинах с шагом, соответствующим шагу размещения рычагов с токоподводящими пластинами, что упрощает монтаж и обслуживание системы вследствие размещения клемм вблизи от рычагов с токоподающими пластинами.
Данные существенные признаки, отличающие заявляемое техническое решение, в известных технических решениях не выявлены, что позволяет сделать вывод о соответствии его критерию "Существенные отличия".
Анализ показал, что при осуществлении данного изобретения достигается положительный эффект, заключающийся в повышении электробезопасности и повышении надежности работы конвейера.
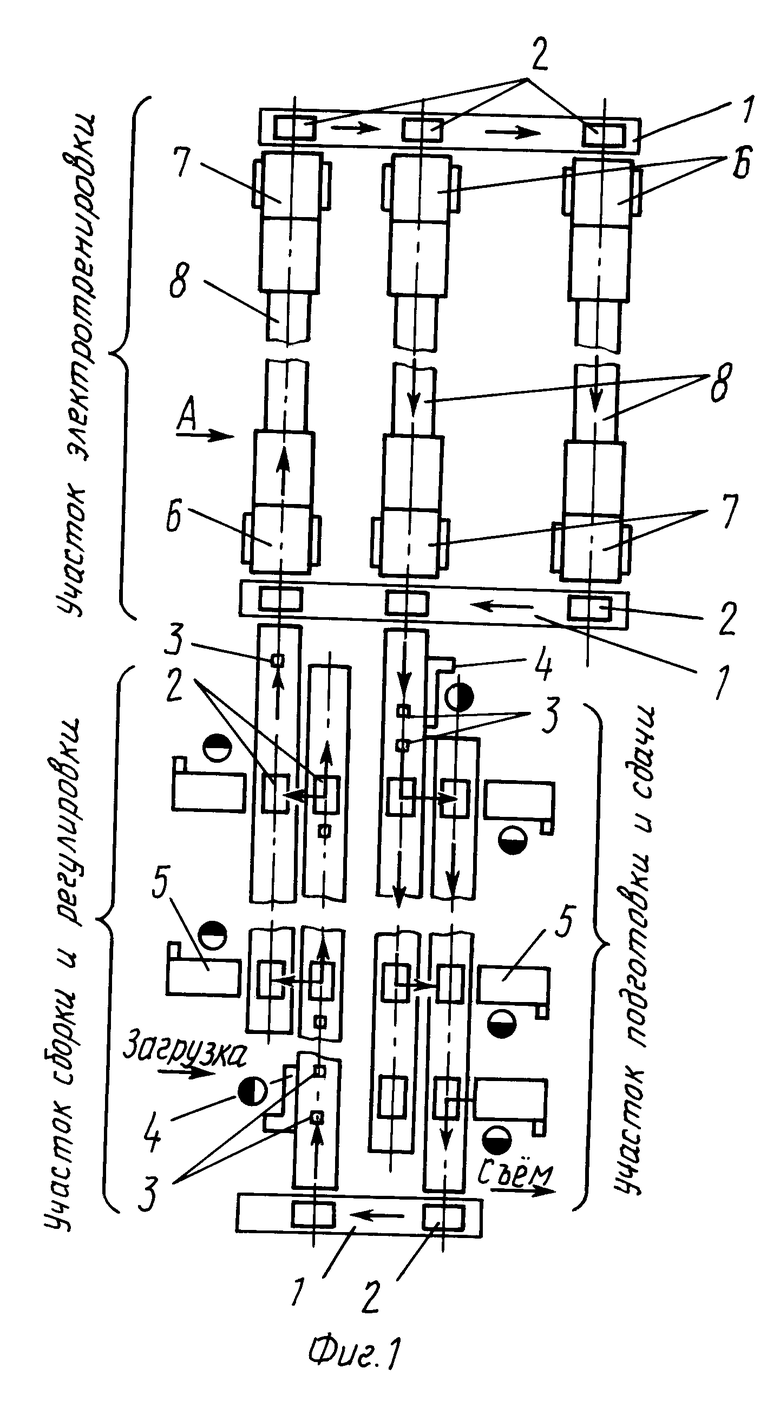
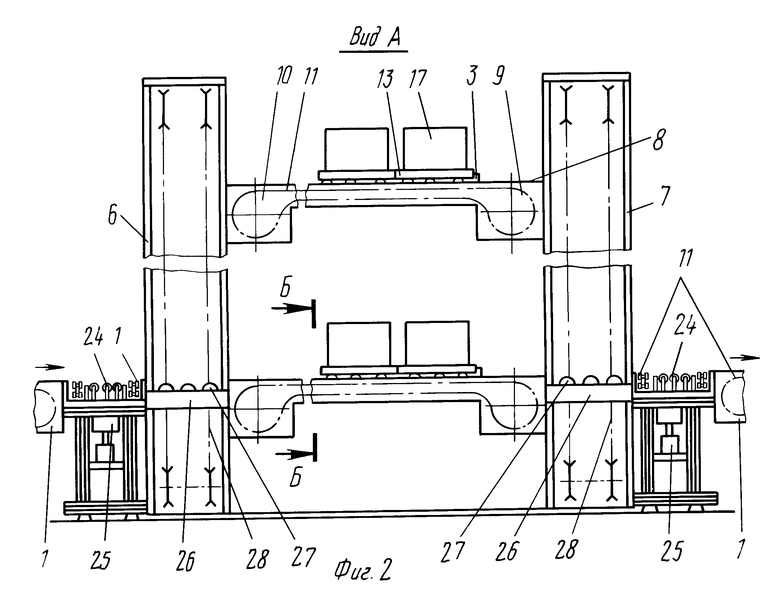
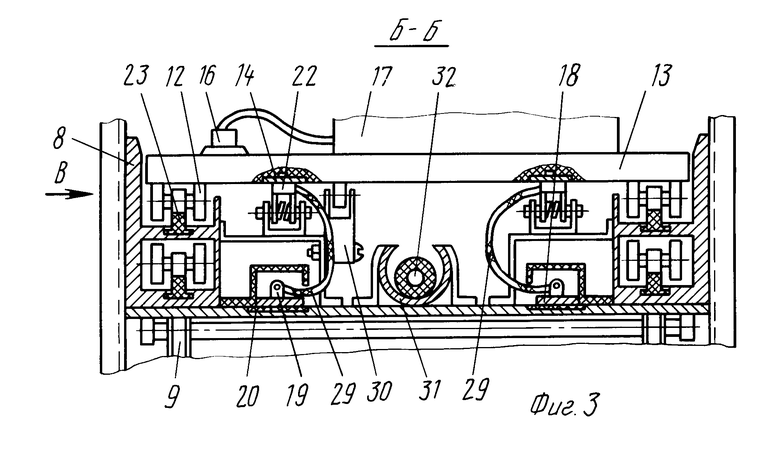
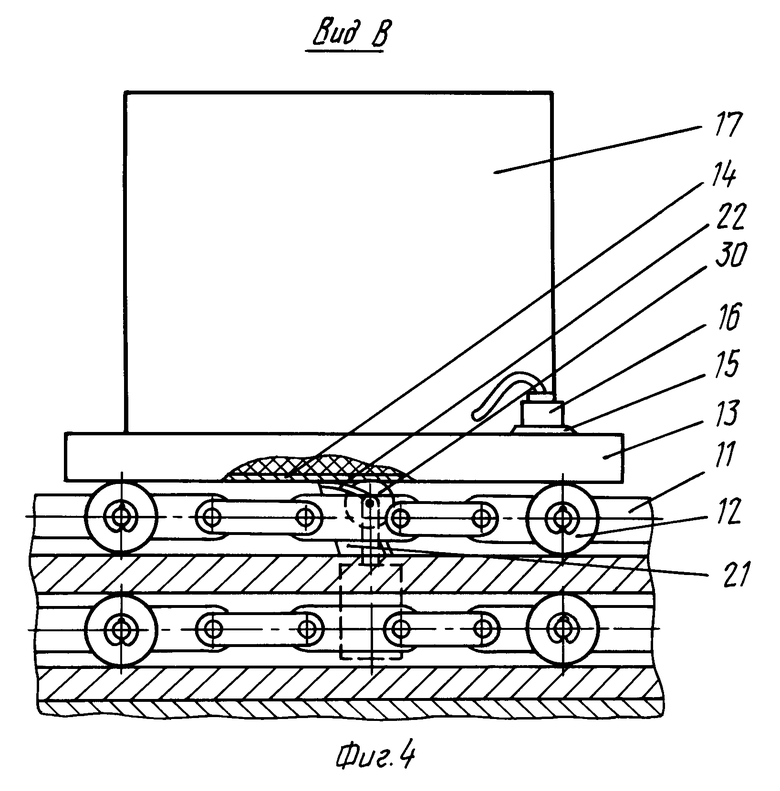
На фиг. 1 изображен конвейер, вид в плане; на фиг. 2 вид по стрелке А на фиг. 1; на фиг. 3 разрез по Б-Б на фиг. 2; на фиг. 4 вид по стрелке В на фиг. 3.
Конвейер включает транспортные модули 1, горизонтальные перекладчики 2, отсекатели 3, модули рабочего места встроенного 4 и приставного 5, установленные в определенной последовательности и образующие участки сборки, регулировки, подготовки и сдачи, подъемники загрузки 6 и разгрузки 7 с расположенными между ними каркасами 8, на каждом этаже которых установлены ведущая 9 и ведомая 10 звездочки с охватывающей их тяговой цепью 11 с несущими роликами 12, грузонесущие платформы 13 с токосъемными шинами 14 и розеткой 15 для подключения вилки 16 изделия 17, токоподводящие шины 18 с клеммами 19, закрытые кожухами 20 из электроизоляционного материала, и подпружиненные рычаги 21 с токоподающими пластинами 22.
Перемещение грузонесущих платформ 13 по транспортным модулям 1 осуществляется также цепью 11 на роликах 12, при этом движение цепей 11 осуществляется по направляющим 23. Перекладчики горизонтальные 2 снабжены приводными роликами 24, которые в исходном положении расположены ниже уровня роликов 12 цепей 11 транспортных модулей 1. Подъем приводных роликов 24 над роликами 12 осуществляется пневмоцилиндром 25.
Подъемники загрузки 6 и разгрузки 7 содержат приемно-передающие платформы 26 с приводными роликами 27. Подъем и опускание приемно-передающих платформ 26 осуществляется посредством цепей 28.
Токоподводящие шины 18 установлены между цепями 11 вдоль каркаса 8, к клеммам 19, расположенным на них, подсоединены провода 29, один из которых непосредственно, а другие посредством датчика 30 подключены к токоподающим пластинам 22 на рычагах 21. Между токоподводящими шинами 18 и экранирующей рубашкой 31 (трубе с прорезью) размещается кабель 32, на который подается высокочастотный сигнал, преобразуемый антенным устройством изделия 17 (телевизора) в видеосигнал.
Конвейер работает следующим образом. При подаче напряжения включаются приводы (на фиг. не показаны) транспортных модулей 1, приводя в движение тяговые цепи 11 с несущими роликами 12, на которых находятся грузонесущие платформы 13. Грузонесущие платформы 13 с размещенной на них комплектацией накапливаются на транспортных модулях 1 около отсекателя 3 перед модулем рабочего места встроенного 4. По команде с модуля рабочего места встроенного 4 отсекатель 3 опускается и грузонесущая платформа 13 с комплектацией перемещается на рабочие места сборки, где осуществляется последовательная сборка изделия 17. Остановка грузонесущей платформы 13 на рабочих местах сборки и регулировки осуществляется также за счет отсекателей 3 без остановки тяговой цепи 11. Собранные изделия 17 на грузонесущей платформе 13 тяговой цепью 11 перемещаются до отсекателей 3, расположенных на внутреннем ручье транспортного модуля 1 напротив каждого модуля рабочего места приставного 5. По команде с одного из модулей рабочего места 5 отсекатель 3 опускается и грузонесущая платформа 13 посредством горизонтальных перекладчиков 2 передается на модуль рабочего места 5.
На каждом модуле рабочего места производится полный цикл регулировочных работ, вилка 16 изделия 17 подключается к розетке 15 на грузонесущей платформе 13. После завершения требуемого цикла операций изделие 17 на грузонесущей платформе 13 посредством горизонтального перекладчика 2 перегружается на внешний ручей транспортного модуля 1 и перемещается до отсекателя 3, расположенного около участка электротренировки. Включается пневмоцилиндр 25, поднимая приводные ролики 24 до уровня роликов 12 соответствующих транспортных модулей 1, отсекатель 3 опускается и грузонесущая платформа 13 загружается на приемно-передающую платформу 26 подъемника 6. Приемно-передающая платформа 26 посредством цепи 28 перемещается до высоты загружаемого этажа на каркасе 8. Включаются приводные ролики 27 приемно-передающей платформы 26 и привод (на фиг. не показан) загрузки этажа, и грузонесущая платформа 13 с изделием 17 перемещается тяговой цепью 11 на несущих роликах 12 до отсекателя 3 по направляющим 23.
Пневмоцилиндр 25 опускает приводные ролики 24 горизонтального перекладчика 2 в нижнее исходное положение. Отсекатель 3 на загружаемом этаже установлен так, что грузонесущая платформа 13 взаимодействует с датчиком 30, а ее токосъемные шины 14 соприкасаются с токоподающими пластинами 22 на рычагах 21. На токоподводящие шины 18 подается напряжение и, если грузонесущая платформа взаимодействует с датчиком 30, то ток через клеммы 19, провода 29, токоподводящие пластины 22, розетки 15 и вилки 16 подается на изделие 17, а если грузонесущая платформа 13 не взаимодействует с датчиком 30, то напряжение на изделие 17 не подается. Изображение на экране получается за счет преобразования высокочастотного сигнала, подаваемого по кабелю 32 антенным устройством изделия 17.
Приемно-передающая платформа 26 опускается в исходное положение и на нее вновь с соответствующего транспортного модуля 1 посредством соответствующего горизонтального перекладчика 2 загружается грузонесущая платформа 13 с изделием 17. Далее цикл загрузки повторяется и производится полная загрузка этажа. При этом при загрузке этажа каждое изделие 17 подключается автономно.
По завершении цикла электротренировки на одном из этажей его разгрузка производится приемно-передающей платформой 26 подъемника разгрузки 7. Работа последующих участков аналогична работе предшествующих участков. По завершении технологических операций на конвейере изделие 17 отключается и снимается с грузонесущей платформы 13.
Размещение клемм 19 на шинах 18 с шагом, соответствующим шагу установки рычагов 21 с токоподающими пластинами 22, позволяет прокладывать провода 29 по оптимальным маршрутам, производить предварительную подготовку проводов при монтаже конвейера, быстрее обнаруживать и устранять неисправность.
Использование предлагаемого конвейера позволяет исключить возможность контактирования оператора с открытыми токоведущими частями конструкции при удалении бракованных изделий, проведении ремонтных и регламентных работ, повышает надежность передачи электроэнергии на изделие за счет применения пайки и зажимов, повышает производительность конвейера, так как изделие при загрузке этажей включается автономно, не ожидая заполнения всего этажа, сокращаются производственные площади, так как грузонесущие платформы на этажах располагаются вплотную друг к другу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерная система для сборки, регулировки и электротренировки видеоаппаратуры | 1990 |
|
SU1789450A1 |
| Цепной конвейер для технологических операций | 1990 |
|
SU1687534A1 |
| ГОРИЗОНТАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1994 |
|
RU2090480C1 |
| Агрегат для термообработки стеклоизделий | 1979 |
|
SU872471A1 |
| Вертикальная конвейерная система для штучных грузов | 1985 |
|
SU1680599A1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1244046A1 |
| Подвесной грузонесущий конвейер | 1986 |
|
SU1473256A1 |
| Люлечный элеватор | 1977 |
|
SU621619A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
Испоьзование: изобретение относится к конвейерному транспорту, в частности к конвейерам с подводом электроэнергии к транспортируемым изделиям, например аудивидеоаппаратуре и другим видам электронной аппаратуры. Сущность изобретения: конвейер содержит транспортные модули с ведущими и ведомыми звездочками и охватывающими их тяговыми цепями с несущими роликами, грузонесущие платформы с токосъемными шинами, систему токопровода с токопроводящими пластинами на рычагах, и механизмы загрузки и разгрузки конвейера. Каждая токопроводящая шина выполнена с кожухом из электроизоляционного материала и снабжена клеммами. Токоподводящие пластины на рычагах подключены к соответствующим клеммам на токоподводящих шинах посредством датчиков, установленных с возможностью взаимодействия с грузонесущими платформами. Клеммы на токопроводящих шинах установлены с шагом, соответствующим шагу размещения рычагов с токоподводящими пластинами. 4 ил.
КОНВЕЙЕР ДЛЯ ТЕХНОЛОГИЧЕСКИХ ОПЕРАЦИЙ, содержащий транспортные модули с ведущими и ведомыми звездочками и охватывающими их тяговыми цепями с несущими роликами, грузонесущие платформы с токосъемными шинами, систему токоподвода с токоподводящими пластинами на рычагах, и механизмы загрузки и разгрузки конвейера, отличающийся тем, что каждая токоподводящая шина выполнена с кожухом из электроизоляционного материала и снабжена клеммами, а токоподводящие пластины на рычагах подключены к соответствующим клеммам на токоподводящих шинах посредством датчиков, установленных с возможностью взаимодействия с грузонесущими платформами, при этом клеммы на токоподводящих шинах установлены с шагом, соответствующим шагу размещения рычагов с токоподводящими пластинами.
| Цепной конвейер для технологических операций | 1990 |
|
SU1687534A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
