Область техники
Областью техники, к которой относится изобретение, является электронная техника и радиотехника.
Уровень техники
Уровень техники, с которым связано изобретение, характеризуется следующим:
В настоящее время разрабатываются мобильные робототехнические системы - группы (коллективы) мобильных роботов, совместно решающих общую задачу на основе стратегий централизованного и децентрализованного управления (централизованная единоначальная стратегия группового управления, централизованная иерархическая стратегия группового управления, децентрализованная коллективная стратегия группового управления, децентрализованная роевая стратегия группового управления и децентрализованная стайная стратегия группового управления).
Централизованные стратегии группового управления основаны на строгой иерархии управления, в которой основную роль играет центральный компьютер. Это обуславливает усложнение и перегрузку каналов связи, приводит к большому запаздыванию в управлении и уменьшению надежности робототехнических систем, так как отказ центрального компьютера выводит из строя систему в целом.
Децентрализованные стратегии группового управления, основанные на локальной обработке информации, автономном управлении каждым роботом и «горизонтальными» связями внутри системы, используются для увеличения надежности, быстродействия, эффективности и адаптивности робототехнических систем. Однако при возникновении отказов и конфликтных ситуаций, требуется координация всех локальных стратегий управления роботами.
Отмеченные обстоятельства определяют актуальность способа (базовой технологии) создания программно-аппаратных комплексов централизованной и децентрализованной стратегии управления группировкой разнородных робототехнических комплексов на основе разработки алгоритмов адаптации к изменениям обстановки групповых действий в реальном масштабе, являющихся по своей сути основной проблемой создания искусственного интеллекта в целом.
Способ (базовая технология) создания аппаратно-программного комплекса централизованного и децентрализованного управления группировкой робототехнических комплексов характеризуется тем, что при сохранении централизованной стратегии управления группировкой разнородных робототехнических комплексов в целом на децентрализованную стратегию управления группировкой автономность действий отдельного средства с предоставлением ему прав взаимодействовать с соседними средствами.
Раскрытие изобретения
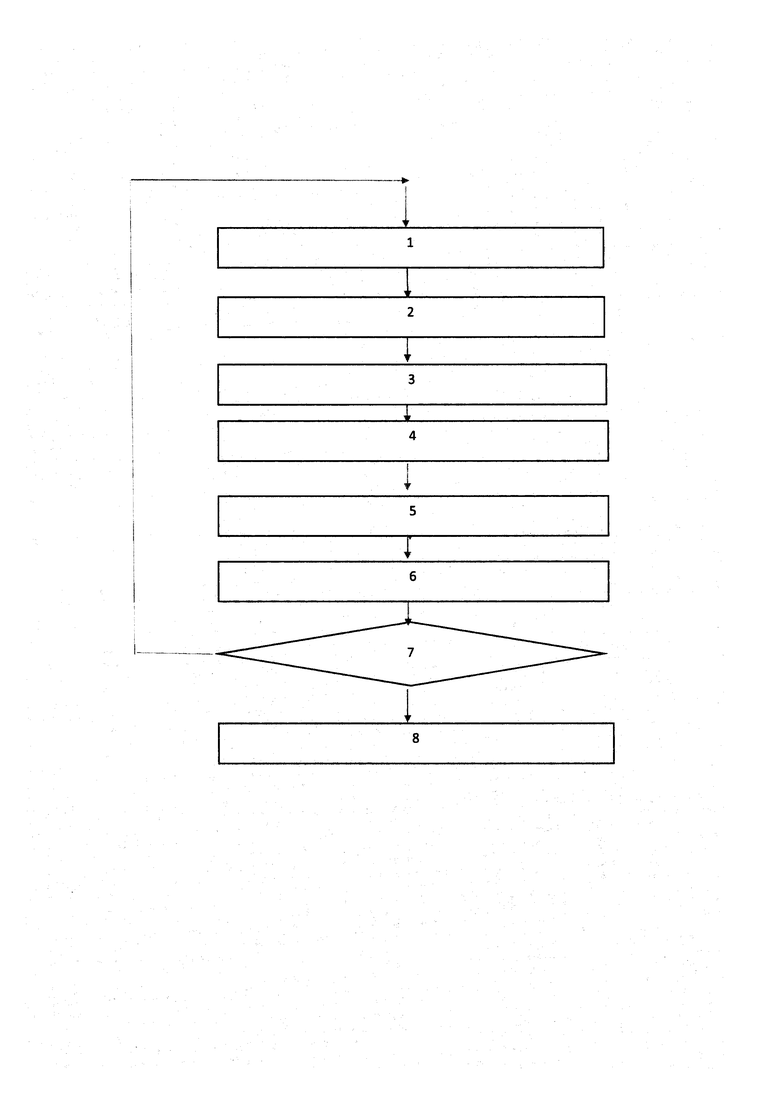
Способ (базовая технология) создания аппаратно-программного комплекса централизованного и децентрализованного управления группировкой робототехнических комплексов, основанный на итерационной процедуре, включающей процессы централизованного управления, заключающиеся в оптимальном распределении заданий разнородным робототехническим средствам на основе известных методов максимального элемента или неопределенных множителей Лагранжа с доведением индивидуальных заданий до робототехнических средств посредством мультисервисной системой связи, и процессы децентрализованного управления робототехническими средствами на основе технологий мультиагентных систем с постоянным возобновлением итерационного цикла управления, обусловленного необходимостью перераспределения задач робототехническим средствам в связи с изменением обстановки или по установленному регламенту возобновления цикла централизованного управления.
1. Постановка задачи на боевое применение разнородного робототехнического комплекса от вышестоящего органа управления.
2. Сбор и анализ данных о предмете воздействия. Разработка сценариев и планирование применения группировки робототехнических комплексов.
3. Перевод подвижных динамических объектов робототехнического комплекса в исходное состояние. Ввод индивидуальных заданий робототехническим комплексам.
4. Движение группы подвижных объектов с распределенным алгоритмом (централизованного и децентрализованного) управления, обеспечивающим формирование заданной конфигурации группы. Выполнение задач по мониторингу обстановки и других специальных задач.
5. Анализ последствий, оценка эффективности применения. Совершенствование арсенала средств выполнения мониторинговых и специальных задач.
6. Анализ условий возобновления цикла централизованного управления.
7. Условия выполнены?
8. Завершение применения разнородного робототехнического комплекса.
Осуществление изобретения
Осуществление изобретения повышает качество (полноту, своевременность и достоверность) процессов адаптивного управления группировкой робототехнических комплексов за счет типизации процессов создания аппаратно-программных комплексов, реализующих итерационную процедуру группового управления, включающую:
выбор стратегии группового управления;
решение задачи планирования действий и целеуказания для каждого робота группировки;
решение задачи автономного движения роботов группировки в заданную точку или по заданному маршруту;
организацию информационного обмена между роботами, входящими в состав группировки, и между каждым роботом и центральным пунктом управления группировкой;
обработку информации, получаемой роботами в процессе их функционирования;
построение системы управления группировкой роботов в целом.
Отличительной особенностью технологи является реализация итерационной процедуры группового управления на основе процессов «жесткого» централизованного управления и «мягких» процедур децентрализованного управления на основе реализации технологий мультиагентного управления.
Технической основой реализации изобретения являются специальное программное обеспечение комплекса мониторинга и конфигурирования (СПО КМ), специальное программное обеспечение коммутируемой сети управления (СПО КСУ) и специального программного обеспечения алгоритмов децентрализованного управления (СПО АДУ).
СПО КМ обеспечивает:
- отображение интерпретированных данных от сервера конфигурирования и мониторинга на карте в виде условных обозначений;
- отображение загруженной карты, возможность постановки задачи с указанием геопозиции на карте;
- автоматическое определение модулей, которые участвуют в обработке. Автоматическое определение на каждом из модулей обработки:
- название и тип;
- отображение модулей по типам;
- ручное и автоматическое построение трактов обработки. Модули разных участников обработки в редакторе подсвечиваются своим цветом;
- для модулей, участвующих в тракте обработки, отправить команды: старт, стоп, а также реконфигурация;
- автоматическое определение состояния работы модулей и отображение цветом текущего состояния;
- конфигурирование и управление радиосредствами (услугами связи, предоставляемыми управляемым оборудованием), в том числе настройку трактов связи обмена информацией по внешним и внутренним информационным направлениям;
- индикацию текущего состояния управляемого оборудования;
- просмотр интерпретированных данных мониторинга управляемого оборудования на карте в виде условных обозначений и в виде файлов (вывод результатов мониторинга на автоматизированное рабочее место конфигурирования и мониторинга);
- просмотр журналов тревог и событий;
- адресную загрузку конфигураций, а для децентрализованной загрузки передачу команд на загрузку сохраненных ранее конфигураций из памяти ВМ и ОМ.
СПО КСУ представляет собой плоскую сеть, включающую в себя различные среды передачи данных (проводные и беспроводные соединения). Проводная часть сети управления построена на управляемых коммутаторах. Беспроводная часть сети построена на контроллере беспроводных сетей и точках доступа.
СПО АДУ построено на основе модуля Агент, который реализует алгоритмы децентрализованного управления на основе данных, получаемых от других робототехнических комплексов группировки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| СПОСОБ УПРАВЛЕНИЯ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ КОНТРОЛЯ ОКРУЖАЮЩЕГО ПРОСТРАНСТВА | 2019 |
|
RU2718234C1 |
| СПОСОБ АДАПТИВНОГО ГРУППОВОГО УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМИ КОМПЛЕКСАМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2758870C2 |
| Способ формирования управляемой агрегации и управления агрегацией электрической нагрузки и/или источников электрической мощности | 2020 |
|
RU2778876C2 |
| СПОСОБ ГРУППОВОГО УПРАВЛЕНИЯ МОБИЛЬНЫМИ НАЗЕМНЫМИ И ВОЗДУШНЫМИ РОБОТОТЕХНИЧЕСКИМИ СРЕДСТВАМИ | 2015 |
|
RU2615714C1 |
| Система управления вооружением летательных аппаратов | 2021 |
|
RU2780716C1 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| Автономный необитаемый подводный аппарат | 2019 |
|
RU2722258C1 |
| СИСТЕМА ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АГРЕГИРОВАНИЯ ВХОДНЫХ ПОТОКОВ ИНФОРМАЦИИ О ВОЗДУШНОЙ ОБСТАНОВКЕ И ЕЕ ОБРАБОТКИ В СИСТЕМАХ УПРАВЛЕНИЯ РЕАЛЬНОГО МАСШТАБА ВРЕМЕНИ | 2013 |
|
RU2566944C2 |
Изобретение относится к электротехнике и радиотехнике. Способ создания аппаратно-программного комплекса централизованного и децентрализованного управления группировкой робототехнических комплексов, заключающийся в том, что воспроизводят итерационную процедуру процессов централизованного и децентрализованного управления по регламенту или по мере накопления отличий реальной обстановки от имеющейся модели. Сочетают механизмы централизованного управления, реализованные на основе методов математического программирования, и механизмы децентрализованного управления, реализованные на основе мультиагентных систем, технической основой реализации которых является программное обеспечение комплекса мониторинга и конфигурирования, коммутируемой сети управления и алгоритмов децентрализованного управления. Применяют вычислительный модуль, устанавливаемый на разнородных робототехнических средствах, для децентрализованного управления. Повышается качество процессов управления. 1 ил.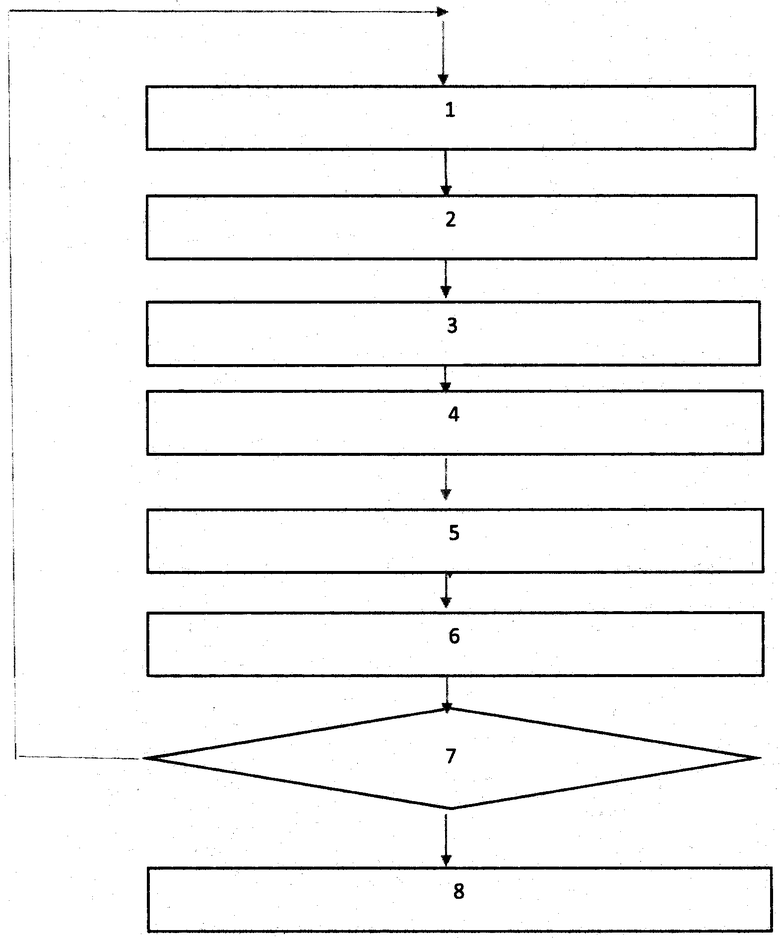
Способ создания аппаратно-программного комплекса централизованного и децентрализованного управления группировкой робототехнических комплексов, основанный на итерационной процедуре и включающий процессы централизованного управления, заключающиеся в оптимальном распределении заданий разнородным робототехническим средствам на основе методов математического программирования, например максимального элемента или неопределенных множителей Лагранжа, с доведением индивидуальных заданий до робототехнических средств мультисервисной системой связи, и процессы децентрализованного управления робототехническими средствами на основе технологий мультиагентных систем с постоянным возобновлением итерационного цикла управления, обусловленного необходимостью перераспределения задач робототехническим средствам в связи с изменением обстановки или по установленному регламенту возобновления цикла централизованного управления, отличающийся тем, что постоянно воспроизводят итерационную процедуру процессов централизованного и децентрализованного управления по регламенту или по мере накопления отличий реальной обстановки от имеющейся модели, по которой осуществлялась процедура централизованного управления, сочетают жесткие механизмы централизованного управления, реализованные на основе методов математического программирования, и гибкие механизмы децентрализованного управления, реализованные на основе мультиагентных систем, технической основой реализации которых является программное обеспечение комплекса мониторинга и конфигурирования, программное обеспечение коммутируемой сети управления и программное обеспечение алгоритмов децентрализованного управления, и применяют вычислительный модуль, устанавливаемый на разнородных робототехнических средствах для реализации процессов децентрализованного управления.
| US 4412293 A, 25.10.1983 | |||
| US 6721444 B1, 13.04.2004 | |||
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯМИ СВЯЗАННОГО ОБЪЕКТА | 1995 |
|
RU2092404C1 |
| Устройство группового программного управления технологическими процессами | 1989 |
|
SU1663603A1 |

