Изобретение относится к области технологии применения противопожарной техники, а именно к управлению мобильными робототехническими средствами пожаротушения. Способ группового управления мобильными наземными и воздушными робототехническими средствами (РТС) в месте пожара и выполнения спасательных работ предназначен для обеспечения группового управления многофункциональными мобильными робототехническими средствами при тушении пожаров, выполнении аварийно-спасательных работ в условиях, связанных с высоким риском для жизни и здоровья личного состава.
Робототехнические средства используются во многих областях науки, техники и промышленности, в первую очередь там, где жизнедеятельность человека либо затруднена, либо вообще невозможна, например в зонах радиоактивного или химического загрязнения.
Один робот не в состоянии за короткий промежуток времени эффективно решать крупномасштабные задачи из-за ограниченных возможностей. Групповое применение роботов позволяет значительно увеличить радиус действия при выполнении аварийно-спасательных операций и расширить набор выполняемых функций, сократив время, отводимое на проведение аварийно-спасательных работ.
Известен способ управления, реализованный наземно-спутниковым радиоканалом связи робототехнического комплекса, описанный в патенте RU 133375 U1 от 14.05.2013, кл. Н04В 7/24.
Этот способ управления обеспечивает дистанционное управление робототехническими комплексами (РТК) с получением телеметрической и мультимедийной информации из района выполнения задачи и может быть использован для передачи сигналов как через основной наземный, так и резервный спутниковый радиоканал связи при отсутствии радиовидимости.
Недостатками этого способа являются, во-первых, «смешанный» канал управления, предназначенный для управления лишь одним роботом; во-вторых, в зоне с препятствиями и наличием «радиотени» в качестве резервного используется только спутниковый канал связи.
Из известных технических решений наиболее близким по назначению и технической сущности к заявляемому способу является наземный пункт управления на базе шасси специального транспортного средства, описанный в патенте RU 2486078 С1 от 03.04.2012, кл. В60Р 9/00, В60Р 3/00, принятый за прототип заявляемого способа.
Недостатком является то, что управление осуществляют только лишь беспилотными летательными аппаратами, оно не предназначено для управления наземными РТС и РТК.
Заявляемый способ группового управления наземными и воздушными РТС в месте пожара и выполнения спасательных работ устраняет указанные недостатки, так как при управлении группировкой робототехнических средств в условиях сложного рельефа местности, особенно в условиях сложной инфраструктуры селитебной и промышленной зон, могут быть использованы радиоканал, спутниковый канал связи и сами РТС в качестве ретрансляторов радиоканала.
Задачей, на решение которой направлено изобретение, является непрерывное функционирование группировки РТС в зоне отсутствия радиовидимости с использованием спутникового канала связи и внешних ретрансляторов.
Для этого в способе группового управления мобильными наземными и воздушными робототехническими средствами, обеспечивающем управление роботами по радиоканалам и спутниковому каналу связи, за счет адаптации команд управления под оборудование робототехнических средств осуществляют управление робототехническими средствами с любого рабочего места оператора или с двух рабочих мест одновременно, где соответственно один оператор управляет базовым мобильным шасси робототехнического средства, а другой оператор - технологическим оборудованием этого робототехнического средства, а также в зонах отсутствия радиовидимости в качестве внешних ретрансляторов радиоканала используют сами робототехнические средства, входящие в состав группировки.
Техническим результатом изобретения является повышение эффективности применения мобильной группировки наземных и воздушных РТС.
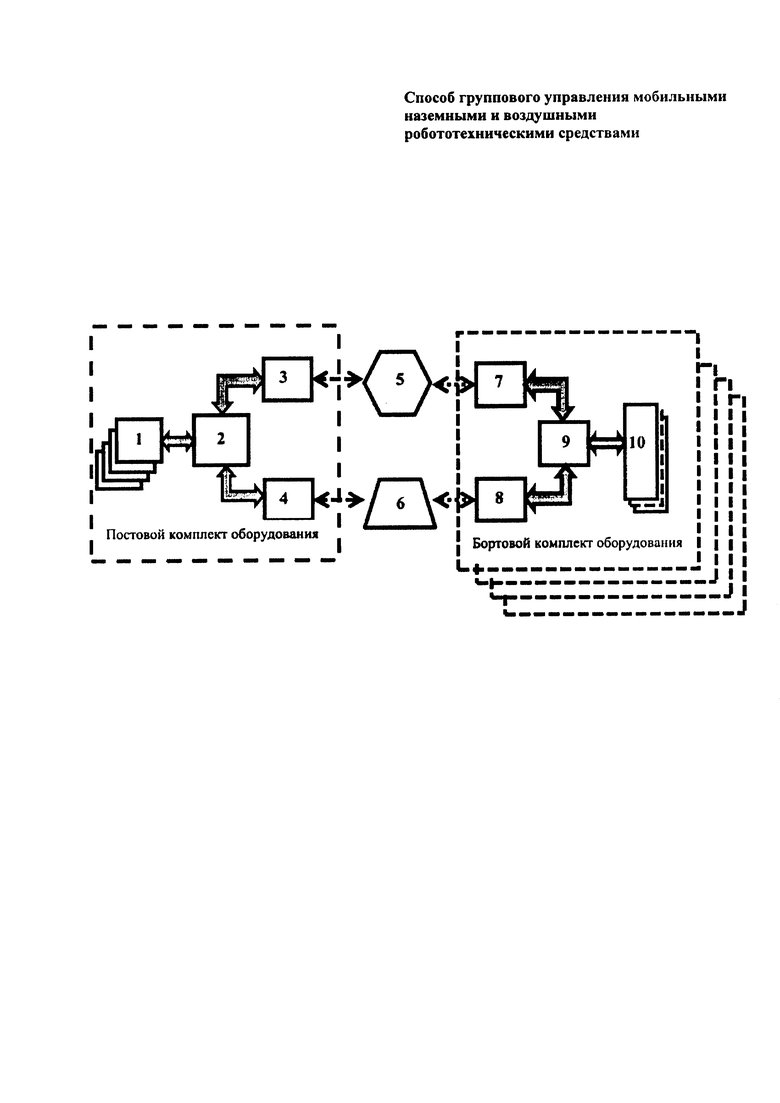
На чертеже представлена схема группового способа управления мобильными наземными и воздушными робототехническими средствами (до четырех РТС), содержащая постовой комплект оборудования, включающий блоки пультов операторов робототехнического средства 1, аппаратно-программный блок обработки и распределения информации 2, оборудование спутникового канала связи 3, оборудование радиоканала связи 4, а также орбитальный ретранслятор спутникового канала связи 5, воздушный ретранслятор радиоканала связи 6 и бортовой комплект оборудования, включающий оборудование спутникового канала связи 7, оборудование радиоканала связи 8, аппаратно-программный блок обработки и распределения информации 9 и систему технического зрения и исполнительных механизмов 10.
Способ группового управления мобильными наземными и воздушными робототехническими средствами функционирует следующим образом.
В режиме управления любым РТС из состава РТК информация (сигналы управления для РТС) передается при помощи органов управления с блоков пультов операторов РТС 1, где выдаются серии команд управления на аппаратно-программный блок обработки и распределения информации 2, осуществляющий ее кодирование и распределение. Кодированные сигналы управления передаются в пространство и принимаются бортовым блоком РТС. При работе РТС в условиях непрямой видимости (при резком ухудшении условий передачи и приема информации) кодированные сигналы ретранслируются воздушным ретранслятором радиоканала связи 6 или орбитальным ретранслятором спутникового канала связи 5. Принятые кодированные сигналы через оборудование спутникового канала связи 7 и/или радиоканала связи 8 поступают на аппаратно-программный блок обработки и распределения информации 9, входящие в состав бортового комплекта оборудования. РТС, получая информацию (декодированные сигналы управления в соответствии с индивидуальным кодом), совершают манипуляции по заданию оператора. В управление РТС приводится через систему технического зрения и исполнительных механизмов 10. Через эту же систему оператор получает информацию об окружающей среде в зоне нахождения РТС.
Таким образом, в зоне отсутствия радиовидимости автоматически осуществляется переключение потоков информации на резервный воздушный или спутниковый каналы связи, а также может использоваться само РТС в качестве ретранслятора.
При выходе РТС из зоны отсутствия радиовидимости, работающая в режиме дежурного приема аппаратура постового комплекта оборудования комплекса, фиксирует появление зондирующего сигнала с бортового комплекта оборудования по радиоканалу. Аппаратно-программный блок обработки и распределения информации 2 автоматически переключает передачу потока информации со спутникового канала связи на радиоканал.
Заявляемый способ группового управления РТС позволяет выполнять одновременное сопровождение до четырех РТС (наземных, воздушных) в особо опасных условиях. Обеспечивается оперативная радиосвязь между всеми РТС мобильного комплекса группового управления робототехническими средствами, РТК, беспилотными летательными аппаратами (БПЛА) и ликвидаторами чрезвычайной ситуации (ЧС) с отображением их местонахождения на электронной карте местности. Выполняется ретрансляция сигналов с использованием спутникового оборудования через внешние ретрансляторы, в качестве которых могут выступать РТС (БПЛА), входящие в состав группировки. Способ может функционировать в составе единой государственной системы предупреждения и ликвидации ЧС.
Для этого разработана иерархическая централизованно-децентрализованная система группового управления, состоящая из операторов, мобильного комплекса группового управления робототехническими средствами, РТК (БПЛА), которая обеспечивает распределение между ними в соответствие со специализацией стоящих задач, а также информационного объема. Специализированная конфигурация оборудования системы группового управления позволяет наращивать базу данных при подключении вновь создаваемых роботов.
Таким образом, использование предлагаемого организационно-технического решения повышает эффективность пожаротушения и расширяет функциональные возможности мобильной группировки наземных (воздушных) робототехнических средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| Способ управления полётом беспилотного летательного аппарата | 2022 |
|
RU2816327C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАДИОСВЯЗИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) НА ТЕРРИТОРИИ С РАЗРУШЕННОЙ ИНФРАСТРУКТУРОЙ СВЯЗИ В ЗОНАХ СТИХИЙНОГО БЕДСТВИЯ И ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2554517C2 |
| НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМИ КОМПЛЕКСАМИ | 2017 |
|
RU2661264C1 |
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
| Робототехническая система для охраны территории объекта с использованием беспилотного летательного аппарата-инспектора | 2021 |
|
RU2756335C1 |
Изобретение относится к области технологии применения противопожарной техники, а именно к управлению мобильными робототехническими средствами пожаротушения. Способ группового управления мобильными наземными и воздушными робототехническими средствами обеспечивает управление роботами по радиоканалам и спутниковому каналу связи. Осуществляют управление робототехническими средствами с любого рабочего места оператора или с двух рабочих мест одновременно, где соответственно один оператор управляет базовым мобильным шасси робототехнического средства, а другой оператор - технологическим оборудованием этого робототехнического средства. При этом в зонах отсутствия радиовидимости в качестве внешних ретрансляторов радиоканала используют сами робототехнические средства, входящие в состав группировки. Технический результат заключается в обеспечении непрерывного функционирования группировки робототехнических средств пожаротушения. 1 ил.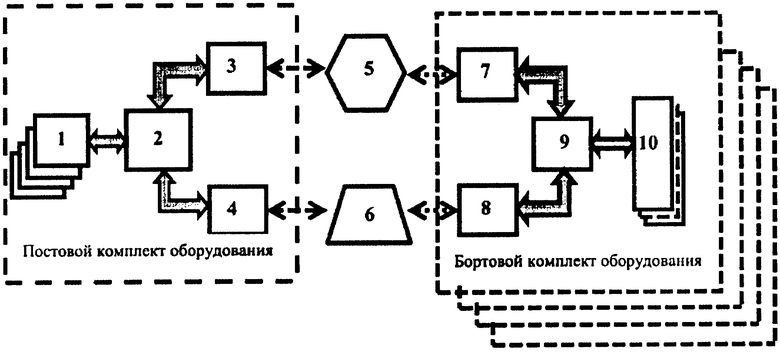
Способ группового управления мобильными наземными и воздушными робототехническими средствами, обеспечивающий управление роботами по радиоканалам и спутниковому каналу связи, отличающийся тем, что за счет адаптации команд управления под оборудование робототехнических средств осуществляют управление робототехническими средствами с любого рабочего места оператора или с двух рабочих мест одновременно, где соответственно один оператор управляет базовым мобильным шасси робототехнического средства, а другой оператор - технологическим оборудованием этого робототехнического средства, а также в зонах отсутствия радиовидимости в качестве внешних ретрансляторов радиоканала используют сами робототехнические средства, входящие в состав группировки.
| НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ НА БАЗЕ ШАССИ СПЕЦИАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2486078C1 |
| Машина для удаления гребешков из затяжной кромки обуви | 1960 |
|
SU133375A1 |
| US 6535793 B2, 18.03.2003 | |||
| US 2011046781 A1, 24.02.2011. | |||

