Настоящее изобретение относится к способу пилотирования беспилотного летательного аппарата (БЛА) в ответ на аварийную ситуацию.
БЛА обычно управляет удаленный оператор по беспроводной связи. Это часто возникает, когда компонент БЛА дает сбой, или утеряна часть функциональных возможностей, беспилотный летательный аппарат не способен осуществить соответствующее изменение своего плана полета.
Кроме того, предшествующий уровень техники не учитывает возможность возникновения нескольких сбоев.
По первому аспекту настоящего изобретения предлагается способ пилотирования беспилотного летательного аппарата, способ включает этапы, осуществляемые с помощью контроллера, составляющего часть беспилотного летательного аппарата, указанные этапы включают: определение нескольких аварийных ситуаций; присвоение каждой аварийной ситуации уровня приоритета; обозначение задачи для каждой аварийной ситуации; определение нескольких эксплуатационных параметров беспилотного летательного аппарата для обнаружения присутствия одной из нескольких аварийных ситуаций; когда обнаружена одна или более аварийных ситуаций: создание траектории для обнаруженной аварийной ситуации с наивысшим присвоенным уровнем приоритета, причем траектория создается в соответствии с задачей, связанной с аварийной ситуацией, которая имеет наивысший соответствующий уровень приоритета; и команда беспилотному летательному аппарату следовать по созданной траектории.
По второму аспекту настоящего изобретения предлагается система аварийного реагирования для беспилотного летательного аппарата, включающая: устройство ввода для приема нескольких эксплуатационных параметров беспилотного летательного аппарата; процессор, предназначенный для: обнаружения использования эксплуатационных параметров, когда присутствует одна или более аварийных ситуаций; идентификации уровня приоритета, присвоенного аварийной ситуации; идентификации задачи, связанной с аварийной ситуацией с присвоенным наивысшим приоритетом; создание траектории на основе идентифицированной задачи; и устройство вывода для вывода созданной траектории.
Для лучшего понимания настоящего изобретения, а также чтобы показать, как оно может быть реализовано, далее в качестве примера приводится ссылка на сопроводительные чертежи, на которых:
Фиг. 1 - модуль аварийного реагирования системы управления полетом для БЛА, показан схематично;
Фиг. 2 - блок-схема осуществления способа аварийного реагирования;
Фиг. 3 - БЛА; и
Фиг. 4 - блок-схема способа выбора точки прекращения полета.
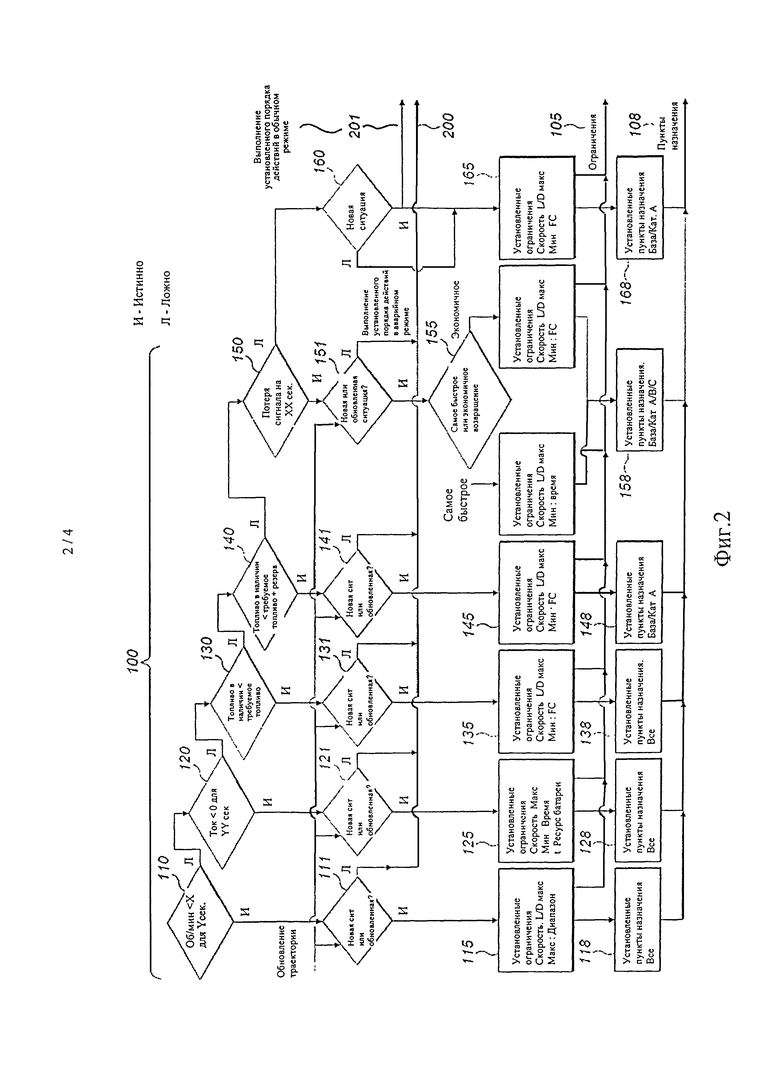
На блок-схемах блоки ромбовидной формы представляют решения, которые меняют прохождение способа по блок-схеме в зависимости от его результата. Если условие в блоке ромбовидной формы истинно, то способ следует по пути, обозначенном буквой "Т". Если условие в блоке ромбовидной формы ложно, то способ следует по пути, обозначенном буквой "F". В блоке 155 решения выбор пути может быть определен посредством того, выбирает ли пользователь самый быстрый или наиболее экономичное возвращение к заданному режиму.
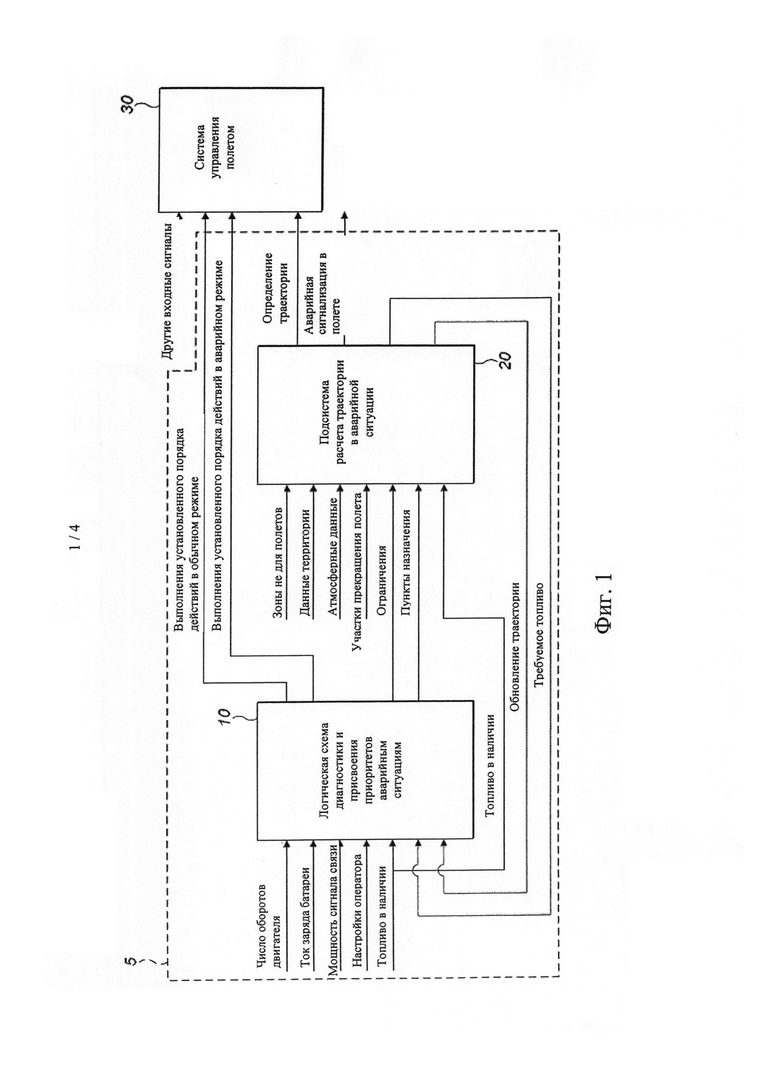
На Фиг. 1 схематично показан модуль 5 аварийного реагирования и его взаимодействие с обычной системой 30 управления полетом БЛА.
Модуль 5 аварийного реагирования составляет часть БЛА.
Модуль 5 аварийного реагирования может содержать: систему 10 диагностики и присвоения приоритетов; и подсистему 20 расчета траектории.
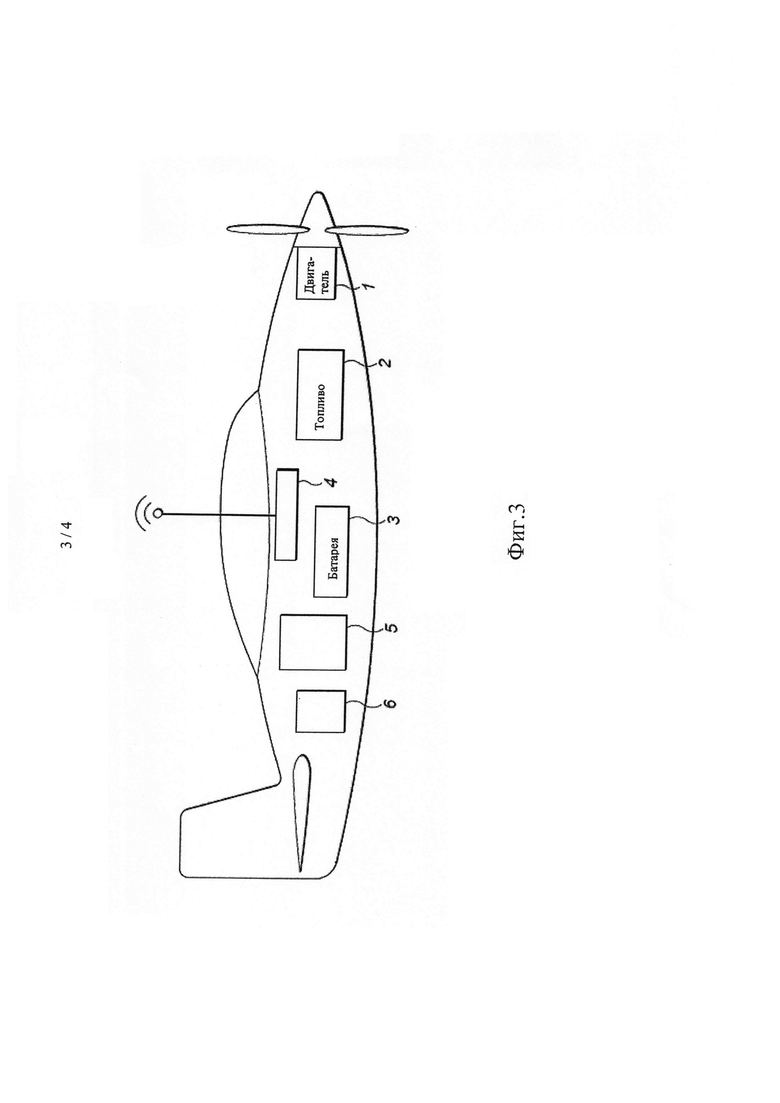
Как показано на Фиг. 3, модуль 5 аварийного реагирования может быть использован для управления БЛА с двигателем 1; топливным баком 2; источником 3 электропитания, таким как аккумуляторная батарея; и системой 4 связи.
Это может быть достигнуто за счет использования модуля 5 аварийного реагирования для обеспечения сигналов непосредственно на систему 30 управления полетом БЛА. Такие сигналы могут включать сигнал выполнения установленного порядка действий в обычном режиме, указывающий, что БЛА должен продолжать обычную эксплуатацию, например, продолжать следовать заранее определенному плану полета.
Дополнительно или вместо этого сигналы могут включать сигнал выполнения установленного порядка действий в аварийной ситуации, указывающий, что БЛА должен прекратить обычную эксплуатацию и выполнить аварийное реагирование, например, чтобы следовать траектории в аварийной ситуации, предусмотренной модулем 5 аварийного реагирования. Траектория в аварийной ситуации может быть предусмотрена подсистемой 20 расчета траектории.
Система 10 диагностики и присвоения приоритетов предназначена для приема сигналов, которые могут представлять эксплуатационные параметры БЛА. Эксплуатационные параметры могут включать: скорость двигателя 1; количество топлива в топливном баке 2; величина тока, обеспечиваемого источником 3 электропитания; уровень заряда батареи; мощность сигнала, принимаемого системой 4 связи.
Система 10 диагностики и присвоения приоритетов осуществляет мониторинг эксплуатационных параметров для обнаружения аварийного состояния в одной из систем БЛА.
Аварийная ситуация может включать комбинацию следующего:
1. Отказ двигателя;
2. Отказ источника электропитания;
3. Предел по дальности; и/или
4. Потеря связи.
Отказ двигателя может быть установлен, когда скорость двигателя 1 ниже пороговой скорости двигателя. Пороговая скорость двигателя может быть определена, как заданная системой 30 управления полетом.
Отказ источника 3 электропитания может быть обусловлен, например, низким зарядом батареи. В альтернативном варианте источник 3 электропитания может представлять собой генератор, приводимый в действие двигателем внутреннего сгорания. Отказ источника 3 электропитания может быть установлен, когда ток, обеспечиваемый источником электропитания, меньше порогового тока (например, 0 А).
Низкий заряд батареи может быть установлен, когда уровень заряда, сохраняемого в аккумуляторной батарее, ниже, чем пороговый заряд батареи. Пороговый заряд батареи может быть определен, как уровень, ниже которого может произойти полный разряд батареи, или пороговое напряжение.
В альтернативном варианте пороговый заряд батареи может быть определен со ссылкой на диапазон, описанным далее образом. Это предпочтительно для БЛА с приводом электродвигателем, а не двигателем внутреннего сгорания.
Предел по дальности относится к ситуации, когда сохраненный ресурс, такой как заряд батареи или имеющееся топливо, недостаточны, чтобы БЛА мог совершать полет по нужной траектории. Примером аварийной ситуации по пределу по дальности может быть недостаток топлива. Для БЛА с приводом электродвигателем, а не двигателем внутреннего сгорания, предел по дальности и отказ источника электропитания могут представлять собой одну и ту же аварийную ситуацию. Недостаток топлива может быть установлен, когда количество топлива в топливном баке 2 ниже порогового количества топлива. Определение со ссылкой на диапазон порогового количества топлива описано далее.
Потеря связи может быть установлена, когда мощность управляющего сигнала ниже пороговой мощности сигнала. Пороговая мощность сигнала может быть определена, как мощность, для которой отношение сигнал/шум достаточно, чтобы обеспечивать связь.
Предпочтительно система 10 диагностики и присвоения приоритетов обнаруживает аварийную ситуацию, когда требуемое состояние (например, слабый сигнал связи) справедливо для заранее определенного минимального периода времени. Таким образом, временные и короткие флуктуации мониторируемого эксплуатационного параметра необязательно запускают действие.
Предпочтительно система 10 диагностики и присвоения приоритетов может обнаруживать устранение аварийной ситуации для возврата БЛА в состояние, в котором он находился до обнаружения какой-либо аварийной ситуации.
Каждой аварийной ситуации, для обнаружения которой предназначена система 10 диагностики и присвоения приоритетов, присваивается уровень приоритета. Уровень приоритета определяет относительную важность аварийной ситуации.
Предпочтительно отказ двигателя обладает более высоким приоритетом, чем отказ источника 3 электропитания, предел по дальности и потеря связи. Предпочтительно отказ источника 3 электропитания обладает более высоким приоритетом, чем предел по дальности. Предпочтительно потеря связи обладает более низким приоритетом, чем отказ двигателя, отказ источника 3 электропитания и предел по дальности.
Система 10 диагностики и присвоения приоритетов создает один или более выходных сигналов, которые могут включать: сигнал установленного порядка действий в обычном режиме; сигнал установленного порядка действий в аварийной ситуации; сигнал, указывающий задачу, используемую подсистемой 20 расчета траектории для обеспечения траектории в аварийной ситуации; и/или сигнал, указывающий нужную точку прекращения полета.
Каждая из аварийных ситуаций, для обнаружения которых предназначена система 10 диагностики и присвоения приоритетов, может быть связана с задачей. Задача обеспечивает ограничение для того, как БЛА должен выполнять полет после обнаружения аварийной ситуации. В частности, она может формировать входной сигнал для подсистемы 20 расчета траектории, тем самым, определяя ограничение для алгоритма расчета траектории.
Предпочтительно отказ двигателя связан с задачей определения наиболее эффективной планирующей траектории (т.е. траектории, которая обеспечивает максимальный диапазон) до точки прекращения полета, т.е. траектория позволяет БЛА планировать до точки прекращения полета за самое короткое возможное время.
Предпочтительно отказ источника 3 электропитания связан с задачей определения самой быстрой обеспечиваемой двигателем траектории до точки прекращения полета, т.е. траектории, которая позволяет БЛА достигнуть точки прекращения полета за самое короткое возможное время (посредством силовых систем или иным образом).
Однако, в некоторых случаях, например, для БЛА с приводом электродвигателем, а не двигателем внутреннего сгорания, ситуация низкого заряда батареи может быть связана с задачей определения наиболее эффективной траектории, т.е. траектории, которая требует наименьшего заряда батареи.
Предпочтительно предел по дальности связан с задачей определения наиболее экономичной траектории, например, траектории, которая позволяет сжигать самое малое количество топлива в БЛА, приводимом в движение двигателем, или использовать самый малый заряд батареи в БЛА с приводом от электродвигателя.
Предпочтительно потеря связи связана с одной из следующих задач, т.е. задачей определения самой экономичной траектории или задачей определения самой быстрой обеспечиваемой двигателем траектории. Наиболее предпочтительно потеря связи связана с задачей определения наиболее экономичной траектории. Задача может быть задана пользователем.
Система 10 диагностики и присвоения приоритетов или внешняя база данных может хранить несколько точек прекращения полета.
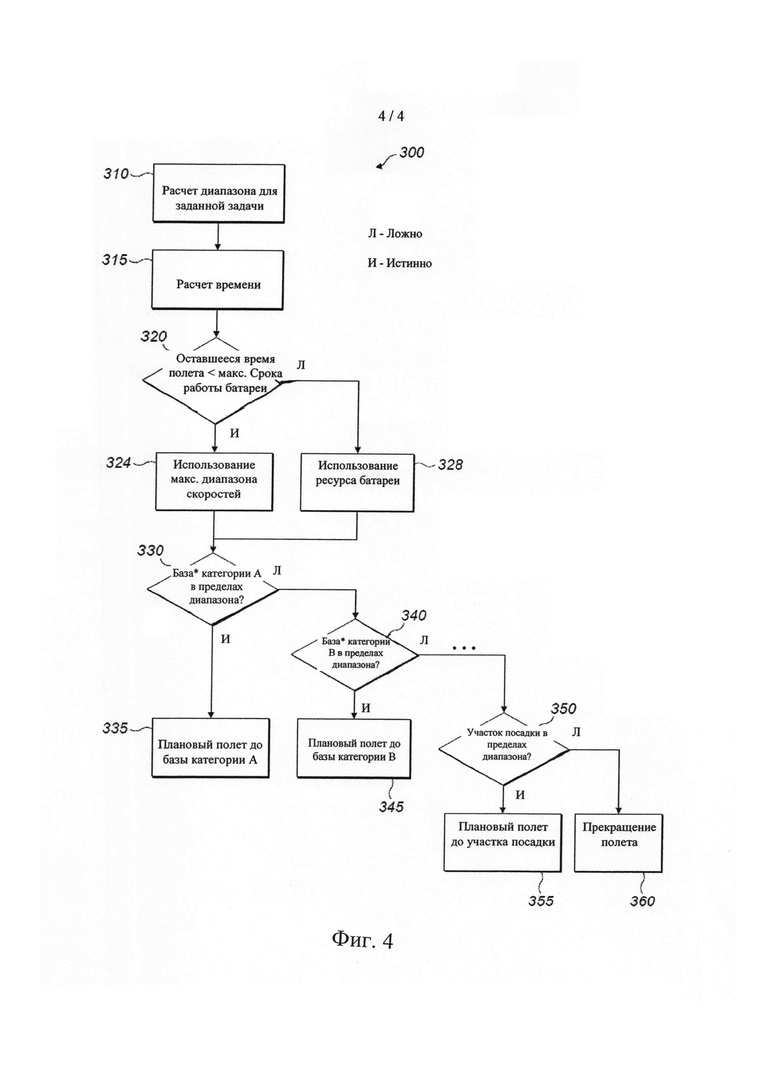
Предпочтительный способ выбора точки прекращения полета среди сохраненных нескольких точек прекращения полета показан на Фиг.4.
Каждая из сохраненных точек прекращения полета может быть связана с категорией.
Например, сохраненные точки прекращения полета могут включать: точки прекращения полета самой высокой категории, это аэродромы с подходящими взлетно-посадочными полосами, которые снабжены подходящей инфраструктурой для приема БЛА; точки прекращения полета более низкой категории, это аэродромы с подходящими взлетно-посадочными полосами, но без подходящей инфраструктуры БЛА; и точки прекращения полета самой низкой категории, это точки прекращения полета, кроме взлетно-посадочных полос, на которых БЛА может приземлиться безопасно.
На первом этапе 310, изображенном на Фиг. 4, осуществляется расчет номинального диапазона (дальности) БЛА на основе задачи, относящейся к аварийной ситуации с наивысшим приоритетом.
Если задачей является наиболее эффективная планирующая траектория (при отказе двигателя), то номинальный диапазон рассчитывается, как максимальная дальность планирования БЛА.
Если задачей является самая быстрая обеспечиваемая двигателем траектория (при отказе источника 3 электропитания), то номинальный диапазон рассчитывается, как дальность БЛА при управлении на максимальной скорости.
Если задачей является наиболее экономичная траектория (при недостатке топлива и при потере связи), то номинальный диапазон рассчитывается, как максимальная дальность БЛА.
На этапе 315, когда рассчитан номинальный диапазон, рассчитывается время, требуемое для достижения номинального диапазона.
На этапе 320 время, требуемое для достижения номинального диапазона, сравнивается с оцененным ресурсом аккумуляторной батареи.
Если время, требуемое для достижения номинального диапазона, меньше оцененного ресурса аккумуляторной батареи, то на этапе 324 номинальный диапазон используется в качестве оцененного диапазона БЛА.
Если время, требуемое для достижения номинального диапазона, больше оцененного ресурса аккумуляторной батареи, то на этапе 328 оцененный диапазон БЛА рассчитывается, как расстояние, на которое БЛА может переместиться за оставшееся время, определенное по оцененному ресурсу аккумуляторной батареи и заданной текущей задаче.
На следующем этапе 330 идентифицируются все точки прекращения полета, связанные с наивысшей категорией (например, категория А на Фиг. 4) и находящиеся в пределах оцененного диапазона БЛА, по нескольким сохраненным точкам прекращения полета.
Если идентифицирована по меньшей мере одна точка прекращения полета, связанная с наивысшей категорией, то на этапе 335 будет выбрана точка прекращения полета, связанная с наивысшей категорией, которая является самой близкой, достижимой быстрее всего или достижимой с помощью наименьшего количества сохраненного ресурса.
Если точки не найдены, то на этапе 340 идентифицируются любые точки прекращения полета, связанные со следующей наивысшей категорией (например, категория В на чертеже), находящиеся в пределах оцененного диапазона БЛА, по сохраненным нескольким точкам прекращения полета.
Если идентифицирована по меньшей мере одна точка прекращения полета, связанная с этой категорией, то на этапе 345 будет выбрана самая близкая точка прекращения полета, связанная с этой категорией.
Если ничего не найдено, то операции этапов 340 повторяют для каждой категории в нисходящем порядке, пока на этапе 350 не будут идентифицированы какие-либо точки прекращения полета, связанные с самой низкой категорией, в пределах оцененного диапазона БЛА среди нескольких сохраненных точек прекращения полета.
Если идентифицирована по меньшей мере одна точка прекращения полета, связанная с самой низшей категорией, то на этапе 355 будет выбрана самая близкая точка прекращения полета, связанная с самой низшей категорией.
В предпочтительных вариантах осуществления, если по сохраненным точкам прекращения полета нельзя идентифицировать по меньшей мере одну точку прекращения полета, связанную с самой низшей категорией, то на этапе 360 БЛА может выполнить прекращение полета в точке прекращения полета, которая не является сохраненной точкой прекращения полета. Это может повлечь за собой выбор точки прекращения полета около текущего местоположения БЛА или выбор точки прекращения полета, удаленной (например, на максимальное достижимое расстояние) от некоторого местоположения или области (например, жилого района).
Это необязательно, но БЛА может развернуть парашют 6 во время прекращения полета, или войти в режим принудительного сваливания или пикирования по спирали, или войти в другой маневр. Соответственно, БЛА может прекратить полет предсказуемым образом.
Также необязательно, на этапе 360, БЛА может передать точку приземления пользователю. Точка приземления может быть предсказана заранее до прекращения полета.
Подсистема 20 расчета траектории может быть предназначена для приема точек прекращения полета и задач от системы] 0 диагностики и присвоения приоритетов.
Необязательно подсистема 20 расчета траектории также может быть предназначена для приема входных сигналов, указывающих количество топлива в топливном баке 2.
Необязательно подсистема 20 расчета траектории также может быть предназначена для приема входных сигналов, предусматривающих: местоположение и протяженность каких-либо зон из черного списка; данные, относящиеся к окружающей территории; атмосферные данные; и/или участки прекращения.
Подсистема 20 расчета траектории может создавать траекторию между текущим положением БЛА и точками прекращения полета, предусмотренными системой 10 диагностики и присвоения приоритетов. Расчет траектории может соответствовать задачам, поставленным системой 10 диагностики и присвоения приоритетов.
Траектория может быть рассчитана путем определения самого короткого пути с учетом каких-либо препятствий или зон из черного списка.
Необязательно предусмотрен аварийный выходной сигнал в качестве команды системы 4 связи БЛА для передачи аварийного сигнала удаленному оператору. Он может быть использован в каждой аварийной ситуации за исключением аварийной ситуации потери связи.
На Фиг. 2 приведена блок-схема варианта осуществления с использованием системы 10 диагностики и присвоения приоритетов по Фиг. 1. На Фиг. 2 рассматривается аварийная ситуация: отказа двигателя (см. этап 110); отказ источника электропитания (см. этап 120); предел по дальности (см. этап 130); предел по дальности, включающий резерв ресурса (см. этап 140;) и потеря связи (см. этап 150;). Однако несущественно учитывать все эти ситуации, и подразумеваются варианты осуществления с любой комбинацией этих ситуаций.
На Фиг. 2 система 10 диагностики и присвоения приоритетов оценивает параметры 100 полета для установления каждой аварийной ситуации последовательно и в порядке уровня приоритета.
То есть, на этапе 110 система 10 диагностики и присвоения приоритетов сначала оценивает параметры 100 полета, требуемые для установления наличия аварийной ситуации, связанной с наивысшим уровнем приоритета.
Если аварийная ситуация, связанная с наивысшим уровнем приоритета, не обнаружена, то на этапе 120 система 10 диагностики и присвоения приоритетов оценивает параметры 100 полета, требуемые для установления наличия аварийной ситуации, связанной со следующим наивысшим уровнем приоритета.
Если аварийная ситуация, связанная с самым низшим уровнем приоритета, не обнаружена, то на этапе 160 система 10 диагностики и присвоения приоритетов определяет, является ли это новым состоянием, т.е. присутствовала ли ранее аварийная ситуация, но в текущий моменте нет (например, если аварийная ситуация была обнаружена только временно). Если это новое состояние, то система 10 диагностики и присвоения приоритетов идентифицирует, что существует нормальная ситуация. В таком случае система может на этапе 201 обеспечивать сигнал выполнения установленного порядка действий в обычном режиме на систему 30 управления полетом БЛА. Способ затем возвращается к этапу 100.
Если отсутствие аварийной ситуации не является новым состоянием, то БЛА может продолжать следовать по существующему пути.
В любом случае рассчитывается траектория до точки прекращения полета. Это может быть нужно для определения требований ресурса (например, топлива или заряда батареи). Эта траектория может быть использована для расчета соблюдения условий по пределу по дальности этапов 130 и 140. Точка прекращения полета может быть выбрана с помощью способа по Фиг. 4 и задачи, связанной с пределом по дальности, т.е. наиболее экономичной траекторией. На этом этапе траектория предпочтительно рассчитывается, как траектория до точки прекращения полета в определенной пользователем категории точек прекращения полета.
Таким образом, система 10 диагностики и присвоения приоритетов непрерывно устанавливает, присутствует ли каждая аварийная ситуация, последовательно, а также в порядке снижения уровня приоритета.
Если установлено, что присутствует аварийная ситуация, система 10 диагностики и присвоения приоритетов проверяет, на этапах 111, 121, 131, 141, 151, является ли это новым направлением аварийной ситуации, или эта аварийная ситуация была обнаружена ранее.
Если это не новая аварийная ситуация, то операция оценки параметров 100 полета повторяется.
Если установлено на этапах 111, 121, 131, 141, 151, что обнаружена новая аварийная ситуация, то система 10 диагностики и присвоения приоритетов идентифицирует задачу, связанную с обнаруженной аварийной ситуацией на этапах 115, 125, 135, 145, 151. Новая аварийная ситуация обнаружена, либо когда ранее не было обнаружено аварийной ситуации, либо, если ранее обнаруженная ситуация обладала более высоким приоритетом.
Затем на этапе 105 система 10 диагностики и присвоения приоритетов обеспечивает идентифицированную задачу для подсистемы 20 расчета траектории. На каждом из этапов 118, 128, 138, 148, 158, способ может определять точку прекращения полета. Это может быть выполнено с помощью описанного выше способа. Точка прекращения полета обеспечивается для подсистемы 20 расчета траектории на этапе 108, которая затем рассчитывает траекторию с использованием задачи. Рассчитанная траектория передается в систему 30 управления полетом БЛА для исполнения. Затем операция оценки параметров 100 полета повторяется.
В предпочтительных вариантах осуществления, таких как показанные на Фиг. 2, когда обнаружена аварийная ситуация, система не оценивает параметры 100 полета, требуемые для установления того, присутствует ли аварийная ситуация, связанная с более низкими уровнями приоритета. Однако система оценивает параметры 100 полета, требуемые для установления того, присутствует ли аварийная ситуация, связанная с более высокими уровнями приоритета.
Например, если присутствует аварийная ситуация недостатка топлива, способ обнаруживает это на этапе 130 и переходит к этапу 131, который либо (если это не новая аварийная ситуация) направляет способ назад на этап 100, либо (если это новая аварийная ситуация) переходит посредством этапов 131, 135, 138, 105 и 108 назад к этапу 100. После этапа 100 аварийная ситуация с более высоким приоритетом снова оценивается на этапах 110 и 120, но способ не переходит к этапу 140, пока присутствует аварийная ситуация недостатка топлива.
Если, когда обнаружена аварийная ситуация, другая аварийная ситуация с более высоким связанным уровнем приоритета обнаружена в первый раз, система 10 диагностики и присвоения приоритетов идентифицирует задачу, связанную с новой обнаруженной аварийной ситуацией, а затем обеспечивает идентифицированную задачу на подсистему 20 расчета траектории. Операция оценки параметров 100 полета затем повторяется, но теперь не оценивается аварийная ситуация более низкого приоритета.
Таки образом, когда обнаружена аварийная ситуация, система непрерывно осуществляет мониторинг аварийной ситуации с более высокими уровнями приоритета и обеспечивает новые команды, если она из таких ситуаций обнаружена. Поэтому новые команды заменяют существующие команды.
Необязательно, и это не показано на Фиг. 2, когда обнаружена потеря связи, и это является новой ситуацией, система 10 диагностики и присвоения приоритетов проверяет, нужна ли связь для завершения оставшейся части существующей полетной задачи. Предпочтительно сохраненный заранее определенный план полета может содержать метаданные, указывающие, что по меньшей мере часть полета человек-оператор должен обладать возможностью связи с БЛА (например, это может позволить оператору принимать видео данные в потоковом режиме вживую или управлять устройствами на БЛА или самим БЛА).
Если связь не нужна, то способ возвращается к этапу 100. Если связь нужна, способ переходит к этапу 155, на котором пользовательская настройка задачи может быть проверена для определения того, какую задачу использовать для расчета траектории в аварийной ситуации.
Одним из способов обнаружения аварийной ситуации по пределу по дальности является использование обычной концепции минимального остатка топлива. Он состоит в оценке количества топлива в топливном баке 2 с пороговым количеством топлива (минимальный остаток топлива). Когда количество топлива, сохраненного топливном баке 2, падает до порогового, может быть определена аварийная ситуация по недостатку топлива.
Более сложный необязательный альтернативный способ использования модуля 5 аварийного реагирования состоит в расчете количества сохраненного ресурса, требуемого для полета до точки прекращения полета. Сохраненным ресурсом может быть топливо, сохраненное в топливном баке 2, или, когда БЛА приводится в движение электродвигателем с питанием от аккумуляторной батареи, величина заряда батареи. Предпочтительно подсистема 20 расчета траектории по существу непрерывно рассчитывает количество ресурса (топливо или заряд батареи), требуемого для полета до точки прекращения. Например, оно может быть рассчитано на этапах 165 и 168 по Фиг. 2.
Это рассчитанное количество ресурса можно сравнить с сохраненным количеством ресурса (топливо, сохраненное в топливном баке 2 или сохраненный заряд аккумуляторной батареи). Предпочтительно при этом также приводится коэффициент безопасности, чтобы аварийная ситуация по пределу по дальности могла быть обнаружена, когда количество сохраненного ресурса больше, чем количество ресурса, требуемого для полета до точки прекращения полета, на фиксированное "резервное" количество.
На Фиг. 2 показана аварийная ситуация по лимиту резерва в виде дополнительной ситуации на этапе 140. Эта аварийная ситуация обнаруживается, когда количество сохраненного ресурса меньше, чем количество ресурса, требуемое для полета в точку прекращения полета плюс фиксированное "резервное" количество. Что касается предела по дальности, эта аварийная ситуация связана с задачей определения наиболее экономичной траектории. Однако в этом случае точки прекращения полета с самой низшей категорией не учитываются.
В альтернативном варианте аварийная ситуация недостатка топлива может быть обнаружена, когда количество топлива, требуемого для полета до точки прекращения полета, больше, чем заранее определенное число в процентах количества топлива, сохраненного в топливном баке 2.
Предпочтительно подсистема 20 расчета траектории используется для оценки топлива, требуемого для выполнения плана полета или траектории в аварийной ситуации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА АТМОСФЕРНОГО ВОЗДУХА | 2011 |
|
RU2471209C1 |
| СИСТЕМА ЗАПРАВКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ТОПЛИВОМ В ПОЛЕТЕ | 2021 |
|
RU2777576C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВАРИЙНЫХ УСЛОВИЯХ | 2019 |
|
RU2725640C1 |
| Способ посадки группы беспилотных летательных аппаратов со случайной структурой на посадочную платформу | 2021 |
|
RU2776621C1 |
| УСТРОЙСТВО ПОДЗАРЯДКИ АККУМУЛЯТОРА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2794005C1 |
| Беспилотный летательный аппарат и способ посадки такого аппарата | 2022 |
|
RU2808061C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАНЕВРОВ ПРОИЗВОЛЬНОЙ КОНФИГУРАЦИИ НА КОНЕЧНОМ УЧАСТКЕ ТРАЕКТОРИИ ПЛАНИРУЮЩЕГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2554568C2 |
| Способ интеллектуальной поддержки экипажа летательного аппарата при выполнении им этапа полета | 2020 |
|
RU2751377C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ ВЫПОЛНЕНИЮ ЗАДАЧ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2012 |
|
RU2497063C2 |
Группа изобретений относится к способу пилотирования беспилотного летательного аппарата (БЛА), системе аварийного реагирования и БЛА. Для пилотирования БЛА определяют множество аварийных ситуаций и определяют уровень приоритета и задачу для соответствующей ситуации, измеряют эксплуатационные параметры для выявления аварийной ситуации, указывают БЛА траекторию движения, созданную в соответствии с задачей, связанной с уровнем приоритета. Система аварийного реагирования содержит входное устройство приема эксплуатационных параметров, процессор, выходное устройство. Беспилотный летательный аппарат содержит вышеуказанную систему аварийного реагирования. Обеспечивается изменение плана полета БЛА при возникновении аварийных ситуаций. 3 н. и 16 з.п. ф-лы, 4 ил.
1. Способ пилотирования беспилотного летательного аппарата, включающий этапы, осуществляемые с использованием контроллера, составляющего часть беспилотного летательного аппарата, и включающие:
определение множества аварийных ситуаций;
связывание каждой аварийной ситуации из множества аварийных ситуаций с соответствующим уровнем приоритета;
связывание каждой аварийной ситуации с соответствующей задачей;
измерение множества эксплуатационных параметров беспилотного летательного аппарата для обнаружения присутствия одной из множества аварийных ситуаций;
когда обнаружена одна или более аварийных ситуаций:
создание траектории для определенной аварийной ситуации, имеющей наивысший связанный уровень приоритета, при этом траектория создается в соответствии с определенной задачей, связанной с определенной аварийной ситуацией, которая имеет наивысший связанный уровень приоритета; и
указание беспилотному летательному аппарату следовать по указанной траектории.
2. Способ по п. 1, дополнительно включающий следующие этапы:
сохранение множества точек прекращения полета; и
идентификация имеющегося вспомогательного набора из множества точек прекращения полета, в которых возможна посадка,
при этом этап создания траектории включает создание траектории, оканчивающейся в одной из имеющихся точек вспомогательного набора.
3. Способ по п. 2, дополнительно включающий следующие этапы:
связывание каждой из множества точек прекращения полета с соответствующей категорией,
при этом этап создания траектории, оканчивающейся в одной из имеющихся точек вспомогательного набора, содержит:
выбор точек прекращения полета из имеющегося вспомогательного набора, которые связаны с наивысшей категорией; и
создание траектории, оканчивающейся в одной из выбранных точек прекращения полета.
4. Способ по п. 1, в котором:
беспилотный летательный аппарат содержит двигатель для обеспечения движения;
эксплуатационные параметры включают скорость на выходе двигателя; и
определенной аварийной ситуацией является отказ двигателя.
5. Способ по п. 4, в котором отказ двигателя связан с наивысшим уровнем приоритета.
6. Способ по п. 4, в котором определенная задача состоит в обеспечении наиболее эффективной траектории планирования до точки прекращения полета.
7. Способ по п. 1, в котором:
беспилотный летательный аппарат содержит средство для обеспечения электрического питания;
эксплуатационные параметры включают уровень тока, обеспечиваемого средством подачи электрического питания;
а способ дополнительно включает этап определения порогового тока; и
определенной аварийной ситуацией является уровень тока ниже порогового значения тока.
8. Способ по п. 7, в котором уровень тока связан со вторым наивысшим уровнем приоритета.
9. Способ по п. 7, в котором определенной задачей является скорейшее возвращение в точку прекращения полета.
10. Способ по п. 1, в котором:
беспилотный летательный аппарат содержит сохраненный ресурс;
эксплуатационные параметры включают количество сохраненного ресурса;
а способ включает этап определения порогового количества сохраненного ресурса; и
определенной аварийной ситуацией является количество сохраненного ресурса ниже порогового количества.
11. Способ по п. 10, в котором определенная аварийная ситуация является третьим наивысшим уровнем приоритета.
12. Способ по п. 10, в котором этап определения порогового количества включает:
идентификацию точки прекращения полета;
создание траектории, оканчивающейся в идентифицированной точке прекращения полета; и
определение минимального количества сохраненного ресурса, требуемого для достижения траектории.
13. Способ по п. 10, в котором определенной задачей является наиболее экономичный возврат в точку прекращения полета.
14. Способ по п. 1, в котором:
беспилотный летательный аппарат содержит систему связей, выполненную с возможностью приема управляющего сигнала от удаленной станции;
эксплуатационные параметры включают мощность управляющего сигнала;
а способ включает этап определения пороговой мощности сигнала; и
определенной аварийной ситуацией является мощность управляющего сигнала ниже пороговой мощности сигнала.
15. Способ по п. 14, в котором определенная аварийная ситуация является самым низким уровнем приоритета.
16. Способ по п. 14, в котором определенной задачей является наиболее экономичный возврат в точку прекращения полета.
17. Система аварийного реагирования для беспилотного летательного аппарата, содержащая:
входное устройство, выполненное с возможностью приема множества эксплуатационных параметров беспилотного летательного аппарата;
процессор, выполненный с возможностью:
обнаружения наличия одной или более аварийных ситуаций с использованием множества эксплуатационных параметров;
идентификации соответствующего уровня приоритета, связанного с каждой из указанных одной или более аварийных ситуаций;
идентификации задачи, связанной с определенной аварийной ситуацией из указанных одной или более аварийных ситуаций, которая связана с наивысшим уровнем приоритета;
создания траектории на основе задачи; и
выходное устройство, выполненное с возможностью вывода указанной траектории.
18. Система аварийного реагирования по п. 17, предназначенная для осуществления способа по п. 1.
19. Беспилотный летательный аппарат, содержащий систему аварийного реагирования по п. 17.
| US 7158877 B2, 02.01.2007 | |||
| US 8521340 B2, 07.12.2005 | |||
| DE 19909573 A1, 07.09.2000 | |||
| СИСТЕМА КОНТРОЛЯ И ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННЫХ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ МАЛОЙ АВИАЦИИ В ВОЗДУШНОМ ПРОСТРАНСТВЕ КРУПНЫХ ГОРОДОВ И КРИТИЧЕСКИ ВАЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2343530C1 |
| БОРТОВАЯ АКТИВНАЯ СИСТЕМА БЕЗОПАСНОСТИ ПОЛЕТОВ | 2001 |
|
RU2223542C2 |

