Область техники
Настоящее изобретение относится к способу и устройству для обнаружения контакта между руками и рулевым колесом моторного средства.
Обнаружение того, существует ли контакт между руками водителя и рулевым колесом, которое называется обнаружением "наложенных/снятых рук" для краткости, становится очень важным в виду увеличивающегося распространения сложных систем помощи вождению (например, в случае помощи соблюдения полосы движения). Эти системы предназначены только для того, чтобы помогать водителю, но не предполагают замену водителю, который больше не имеет какого-либо управления транспортным средством, в частности, если водитель отпустил рулевое колесо транспортного средства. Однако водитель может быть очень искушен, чтобы отпускать рулевое колесо в такой ситуации при наличии систем помощи.
Следовательно, по причинам безопасности, необходимо проверять, находится ли по меньшей мере одна из рук водителя в контакте с рулевым колесом, для того, чтобы также иметь возможность вмешиваться вручную при необходимости, или это не так.
Если водитель больше не имеет какого-либо контакта с рулевым колесом, возможны различные меры. Например, водитель может принимать оптическое и/или акустическое предупреждение, системы помощи могут отключаться, возможно, с некоторой задержкой, или транспортное средство может автоматически тормозить управляемым образом, в то же время соблюдая полосу движения и включая аварийную световую сигнализацию.
В этом отношении, обнаружение "наложенных/снятых рук" соответствует приблизительно "(аварийному) тормозу умершего", который уже известен долгое время в отрасли рельсовых транспортных средств и должен управляться водителем с некоторыми интервалами для того, чтобы гарантировать, что водитель жив, находится в сознании и может реагировать на окружающие раздражители.
Обнаружение того, держит или нет водитель по меньшей мере одну руку на рулевом колесе, является простым в тех ситуациях, в которых водитель выполняет движение активного руления. Такое движение рулевого управления может быть обнаружено посредством датчиков угла поворота рулевого колеса и усилия на рулевом колесе, которые в наши дни обязательны для других динамических систем вождения.
Однако это становится более трудным, если необходимы относительно небольшие ручные вмешательства в руление, например, на относительно длинных прямых участках или при использовании автоматических систем помощи в рулении. В этих ситуациях только палец руки водителя может управлять рулевым колесом, например.
В любом случае, необходимо, чтобы обнаружение "наложенных/снятых рук" было выполнено очень надежным образом. Например, даже легкое руление с помощью пальца на прямом участке тем не менее должно иметь возможность обнаруживаться как состояние "наложенных рук".
Уровень техники
DE 101 21 693 C2 раскрывает практическое применение обнаружения рук водителя на рулевом колесе с помощью электронной схемы на основе изменения емкостного сопротивления в резонансном контуре (принцип бесконтактного переключателя). Однако такие бесконтактные переключатели требуют дополнительных электродов, которые могут быть интегрированы, в принципе, в нагревающие провода нагревателя рулевого колеса согласно упомянутому документу. Однако подогреватели рулевого колеса не являются широко распространенным оборудованием, характерным для моторных транспортных средств. Кроме того, емкостные датчики, в принципе, относительно ненадежны и зачастую не могут определять, находятся ли руки фактически в контакте с рулевым колесом или находятся только поблизости от него.
В этом контексте, целью настоящего изобретения было предоставление способа и устройства для обнаружения контакта между руками и рулевым колесом моторного транспортного средства, причем этот способ или устройство делают возможным различение между состоянием "наложенных рук" и "снятых рук" очень надежным образом без необходимости в дополнительном аппаратном обеспечении.
Вышеупомянутая цель достигается посредством способа, имеющего признаки пункта 1 патентной формулы, и посредством устройства согласно пункту 7 патентной формулы, которое предназначено, чтобы выполнять упомянутый способ.
Полезные усовершенствования изобретения описаны в зависимых пунктах формулы изобретения.
Сущность изобретения
Согласно первому аспекту изобретения обеспечен способ для обнаружения контакта между руками и рулевым колесом транспортного средства, актуатор для выборочного приложения усилия на рулевом колесе и по меньшей мере один датчик для измерения текущего усилия на рулевом колесе и/или угла поворота рулевого колеса связаны с рулевым колесом, содержащий следующие этапы, на которых a) актуатор воспроизводит тестовую импульсную последовательность на рулевом колесе; b) датчик усилия на рулевом колесе и/или датчик угла поворота рулевого колеса измеряет(ют) реакцию перемещения рулевого колеса на тестовую импульсную последовательность; c) реакция перемещения рулевого колеса используется, чтобы принимать решение, находится или нет по меньшей мере одна из рук водителя в контакте с рулевым колесом.
Дополнительным усовершенствованием первого аспекта является то, что если этап c) не обнаруживает, что по меньшей мере одна из рук водителя находится в контакте с рулевым колесом, способ выполняется снова, предпочтительно с более сильной и/или длительной тестовой импульсной последовательностью, и при этом принимается решение, что ни одна из рук водителя не находится в контакте с рулевым колесом, только после предварительно определенного числа итераций, предпочтительно после третьей итерации, самое раннее.
Еще одним усовершенствованием первого аспекта является то, что способ прерывается преждевременно, и определяется, что по меньшей мере одна рука находится в контакте с рулевым колесом, как только датчик угла поворота рулевого колеса и/или датчик усилия на рулевом колесе обнаруживает(ют) перемещение рулевого колеса и/или усилие на рулевом колесе, которые могут быть характерны для перемещения рулевого колеса водителем, и/или как только определяется операция элемента управления, скомпонованного на рулевом колесе.
Еще одним усовершенствованием первого аспекта является то, что тестовые импульсные последовательности формируются, относительно профиля и амплитуды сигнала, таким образом, что они не влияют постоянно на угол поворота рулевого колеса, и/или при этом применение тестовой импульсной последовательности, по существу, не может восприниматься водителем, по меньшей мере, во время первого запуска способа.
Еще одним усовершенствованием первого аспекта является то, что тестовая импульсная последовательность формируется посредством периодического сигнала, имеющего профиль сигнала, который, по существу, симметричен в обоих направлениях руления.
Еще одним усовершенствованием первого аспекта является то, что частота тестовой импульсной последовательности соответствует, по существу, резонансной частоте крутильных колебаний рулевого колеса, которые не гасятся водителем.
Согласно второму аспекту изобретения обеспечено устройство для обнаружения контакта между руками и рулевым колесом транспортного средства, актуатор для выборочного приложения усилия на рулевом колесе и по меньшей мере один датчик для измерения текущего усилия на рулевом колесе и/или угла поворота рулевого колеса связаны с рулевым колесом, при этом устройство имеет блок управления, который предназначен, чтобы выполнять вышеуказанный способ.
Краткое описание чертежей
Изобретение обсуждается более подробно в качестве примера ниже с помощью чертежей, на которых:
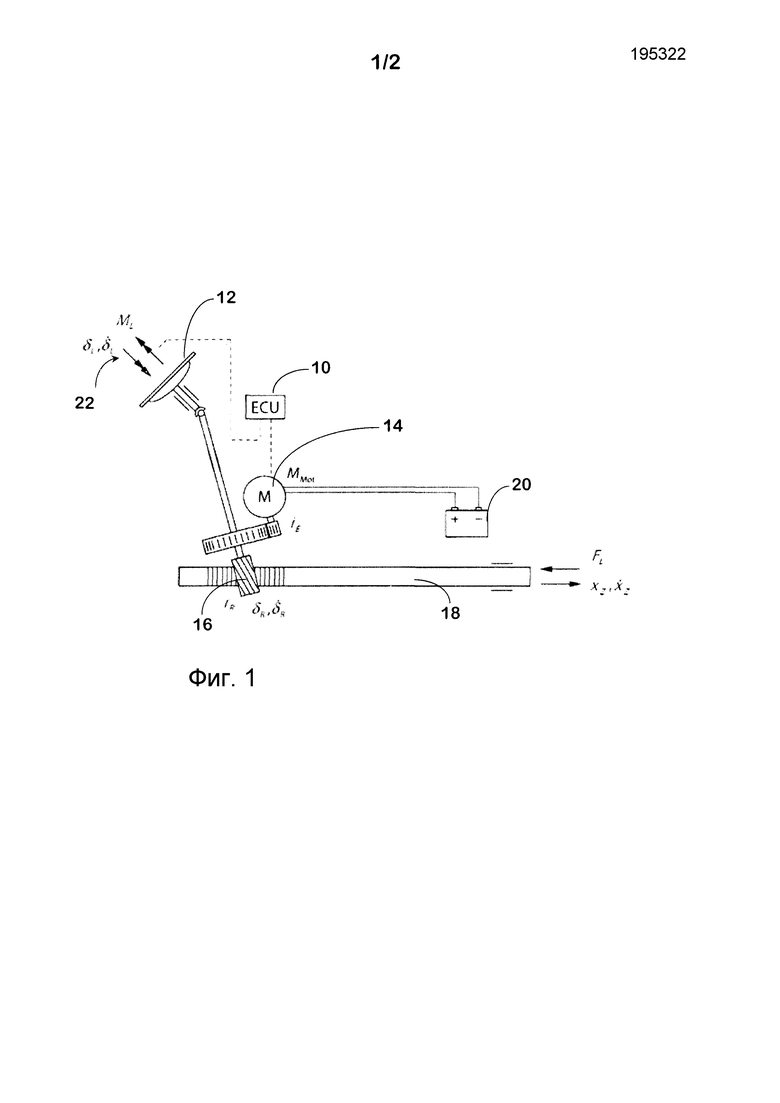
фиг. 1 показывает базовый эскиз системы рулевого управления с актуатором помощи, и
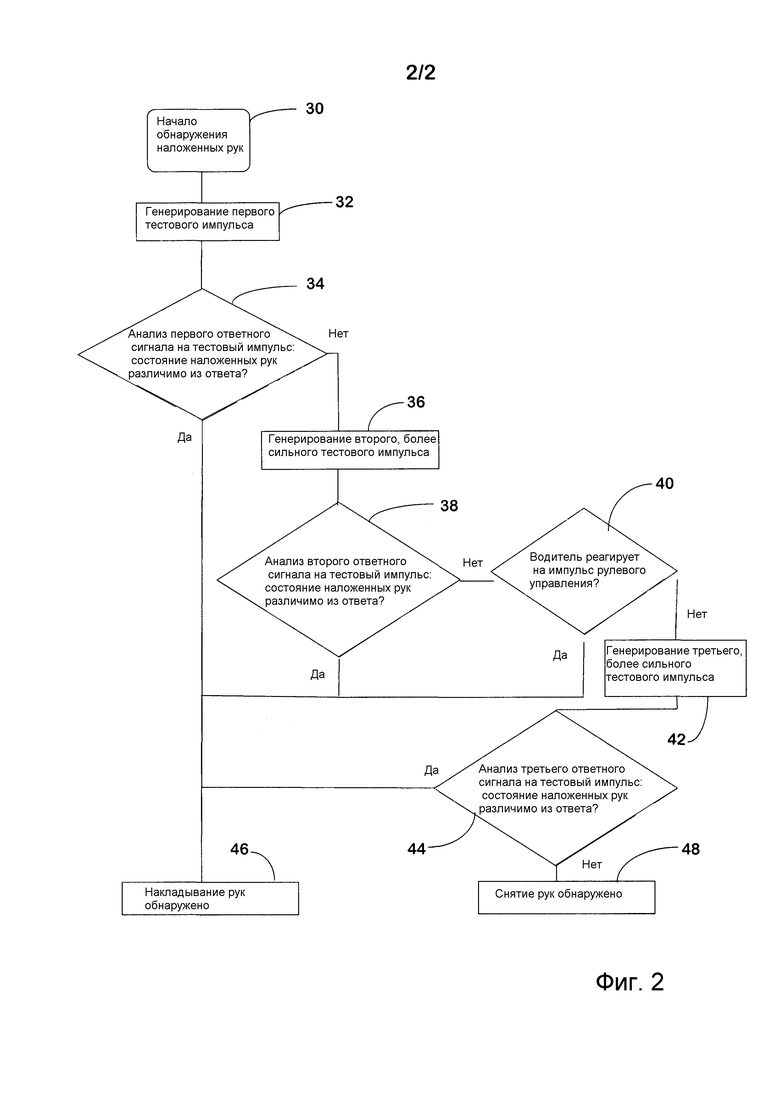
фиг. 2 показывает схематичную блок-схему последовательности операций одной возможной реализации способа обнаружения согласно изобретению.
Подробное описание
Способ согласно изобретению подходит для использования в транспортном средстве, в котором актуатор для выборочного приложения усилия на рулевом колесе и датчики для измерения текущего усилия на рулевом колесе и/или угла поворота рулевого колеса связаны с рулевым колесом. Такие актуаторы в наши дни зачастую уже предусмотрены в качестве стандарта как для помощи усилию на рулевом колесе (рулевое управление с усилителем), так и для выполнения вмешательств в рулевое управление через системы помощи (например, помощи соблюдения полосы движения). Соответствующие датчики угла поворота рулевого колеса и/или усилия на рулевом колесе также уже реализованы на регулярной основе в качестве стандартных в традиционных транспортных средствах.
Предусмотрены следующие этапы в рамках способа согласно изобретению:
a) актуатор воспроизводит тестовую импульсную последовательность на рулевом колесе;
b) датчик усилия на рулевом колесе и/или датчик угла поворота рулевого колеса измеряет(ют) реакцию перемещения рулевого колеса на тестовую импульсную последовательность; и
c) реакция перемещения рулевого колеса используется, чтобы принимать решение, находится или нет по меньшей мере одна из рук водителя в контакте с рулевым колесом.
Изобретение основано на том факте, что нарушение угла поворота рулевого колеса, вызванное тестовым импульсом, формирует различную реакцию в случае свободного рулевого колеса без контакта по меньшей мере одной из рук водителя в сравнении с "удерживаемым" рулевым колесом.
Если этап c) не обнаруживает, что по меньшей мере одна из рук водителя находится в контакте с рулевым колесом, полезное усовершенствование изобретения может предусматривать то, что способ должен выполняться снова предпочтительно с более сильной и/или более длительной тестовой импульсной последовательностью, и должно быть принято решение, что ни одна из рук водителя не находится в контакте с рулевым колесом, только после предварительно определенного числа итераций, предпочтительно после третьей итерации, самое раннее. Это тип стратегии эскалации. Эта стратегия эскалации делает возможным, прежде всего, воспроизведение тестовой импульсной последовательности с самой низкой возможной интенсивностью с результатом, который едва воспринимается или вовсе не воспринимается водителем.
Однако, поскольку эта интенсивность возможно недостаточна, чтобы различать рулевое колесо, которое удерживается лишь очень "слабо", от рулевого колеса, которое было отпущено, проверка повторяется несколько раз, например по меньшей мере три раза, с более высокой интенсивностью и/или продолжительностью тестового сигнала каждый раз. Состояние "снятых рук" считается обнаруженным, только когда перемещению рулевого колеса не "мешает" водитель, даже с более высокой интенсивностью.
Способ обнаружения, описанный выше, предпочтительно прерывается преждевременно, как только датчик угла поворота рулевого колеса и/или датчик усилия на рулевом колесе обнаруживает(ют) перемещение рулевого колеса и/или усилие на рулевом колесе, которые могут быть характерны перемещению рулевого колеса водителем. В таком случае определяется, что по меньшей мере одна рука находится в контакте с рулевым колесом.
Альтернативно или дополнительно, операция элемента управления (например, кнопок или переключателей указателя), скомпонованного на рулевом колесе, может также считаться индикацией (указанием) того, что по меньшей мере одна из рук водителя находится, по меньшей мере, достаточно близко к рулевому колесу.
Как уже упомянуто выше, тестовые импульсные последовательности формируются, относительно профиля и амплитуды сигнала, таким образом, что они не влияют постоянно на угол поворота рулевого колеса, и/или применение тестовой импульсной последовательности, по существу, не может восприниматься водителем, по меньшей мере, во время первого запуска способа.
Тестовая импульсная последовательность предпочтительно формируется посредством периодического сигнала, имеющего профиль сигнала, который, по существу, симметричен в обоих направлениях руления. В простейшем случае, это может быть два коротких участка прямоугольного сигнала с положительной и отрицательной амплитудой, но также вероятны синусоидальные сигналы в течение одного или более периодов.
Если тестовые сигналы периодичные, частота тестовой импульсной последовательности может предпочтительно соответствовать, по существу, резонансной частоте для крутильных колебаний рулевого колеса, которые не гасятся рукой водителя. В этом случае, желаемое обнаружение может выполняться очень выборочным образом, после того как первоначально резонансная система "расстроена" посредством действия водителя.
Согласно фиг. 1, типичная система рулевого управления моторного транспортного средства с электромеханическим усилителем рулевого управления имеет рулевое колесо 12, которое, известным образом, преобразует вращательное движение рулевого колеса 12 в поступательное движение рулевой тяги 18 через шестерню 16 рулевого управления, в результате чего усилие FL на рулевом колесе прикладывается, и рулевая тяга 18 отклоняется на расстояние xz со скоростью 
Управление осуществляется, среди прочего, на основе параметров датчика, которые содержат текущий крутящий момент ML рулевого колеса, абсолютный угол поворота рулевого колеса и угловую скорость δL, 
Даже если электромотор 14, прежде всего, предназначен, чтобы прикладывать дополнительный крутящий момент руления для того, чтобы помогать водителю, крутящий момент, прикладываемый посредством электромотора 14, также влияет на рулевое колесо 12. Следовательно, электромотор 14 может быть использован, чтобы генерировать тестовую импульсную последовательность, воздействия которой на перемещение рулевого колеса затем анализируются. Это может быть короткий, отдельный импульс, например прямоугольный импульс. Так что этот импульс не приводит в результате к какому-либо нежелательному изменению абсолютного угла поворота рулевого колеса, целесообразно, однако, использовать периодические импульсные последовательности, в которых блокировки рулевого управления осуществляются в обоих направлениях руления, с результатом в том, что воздействие тестовых импульсов усредняется.
Влияние тестовых импульсов обнаруживается с помощью датчика 22 усилия на рулевом колесе и/или угла поворота рулевого колеса, в таком случае датчик угла поворота рулевого колеса должен предпочтительно иметь очень низкое разрешение вследствие незначительных отклонений, предпочтительно используемых в качестве тестовых сигналов, с результатом в том, что оценка, прежде всего, выполняется посредством датчика усилия на рулевом колесе.
Измеренная реакция на тестовую сигнальную последовательность отличается в зависимости от того, гасится ли вращательное перемещение рулевого колеса 12 посредством контакта по меньшей мере одной из рук водителя, или может ли система рулевого колеса колебаться свободно.
В последнем случае, усилия на рулевом колесе, измеренные в ответ на тестовые сигналы, будут выше, чем в первом случае. Следовательно, можно различать отсюда, является ли состояние состоянием наложенных рук. Вследствие того факта, что сигнал рулевого колеса может целевым образом анализироваться на реакцию на тестовый сигнал посредством походящей обработки сигнала (например, анализ Фурье), обнаружение является, в принципе, очень надежным и в значительной степени независимым от возмущающих воздействий.
Фиг. 2 схематично иллюстрирует возможную последовательность способа согласно изобретению, причем в этом случае отдельные этапы могут быть исключены или выполняться в другом порядке, если это полезно. Соответствующие этапы реализованы известным образом в качестве программного алгоритма внутри электронного блока 10 управления (ECU), блок управления также очевидно способен одновременно выполнять другие задачи управления.
Переходя от начала обнаружения наложенных/снятых рук на этапе 30, этап 32, прежде всего, генерирует короткий первый тестовый импульс, например, один период синусоидальной волны, с частотой, которая настолько близка, насколько возможно, к частоте незатухающих собственных крутильных колебаний системы рулевого управления. Эта частота в типичном случае является настолько высокой, что ощутимые воздействия на рулевое управление или курс транспортного средства не возникают. Затем (или в то же время, в зависимости от продолжительности и скорости тестового импульса) этап 34 анализирует, имеет ли сигнал усилия на рулевом колесе, измеренный датчиком усилия на рулевом колесе, настолько высокие амплитуды, соответствующие тестовому сигналу, что можно предположить, что рулевое колесо было отпущено. Иначе, обнаружение уже закончилось, и оканчивается на этапе 46 утверждением, что существует состояние наложенных рук.
Обнаружение посредством воспроизведения тестового сигнала с собственной частотой системы рулевого колеса полезно настолько, насколько в случае рулевого колеса, которое "расстроено" по меньшей мере одной из рук водителя, затухающее колебание создается и затем воспринимается менее четко водителем, тогда как в случае свободного рулевого колеса колебание сильнее, но тогда не воспринимается водителем нарушающим образом вследствие отсутствия тактильного контакта с рулевым колесом.
Если состояние наложенных рук не обнаружено на этапе 34, второй, более сильный тестовый импульс генерируется на этапе 36, и реакция ответного сигнала опять анализируется (этап 38) для того, чтобы подтверждать противоположный результат. Если четкое обнаружение наложенных рук все еще невозможно даже посредством этого, третий, даже более сильный тестовый импульс генерируется на этапе 42 для хорошего измерения, и реакция на упомянутый импульс проверяется на этапе 44. Если указание контакта руки с рулевым колесом не обнаружено здесь, этап 48 окончательно обнаруживает состояние снятых рук, которое может затем приводить в результате − как описано вначале − к оптическим и/или акустическим предупреждениям водителю или вмешательствам в различные системы транспортного средства.
Как указано на этапе 40, обнаружение аналогично немедленно заканчивается, и состояние наложенных рук обнаруживается, как только обнаруживается активный импульс руления водителем. По причинам ясности это явно проиллюстрировано только для этапа 38; соответствующее наблюдение для преждевременного окончания проверки предпочтительно выполняется в любое время.
В целом, вышеописанное обнаружение наложенных/снятых рук не должно выполняться постоянно. Интервал, типично в 10 с, между проверками достаточен для многих применений, с результатом в том, что, если рулевое колесо ненадолго отпускается, измерения еще напрямую не выполняются, что в ином случае могло бы быть воспринято водителем как постоянная опека. Пауза в несколько секунд может также быть вставлена в каждом случае между отдельными этапами эскалации, с результатом в том, что всегда проходит несколько секунд, прежде чем обнаруживается состояние снятых рук.
Вследствие того факта, что тестовые сигнальные последовательности усиливаются в ходе эскалации, воспринимаемый первый тестовый сигнал почти всегда является слабым для водителя, если рулевое колесо используется правильно. Более сильные тестовые сигналы во время эскалации возможно более четко заметны; однако, поскольку такие эскалации могут происходить реже, с другой стороны, водитель едва ли будет от них раздражаться.
Группа изобретений относится к области транспортного машиностроения. Способ для обнаружения контакта между руками водителя и рулевым колесом заключается в том, что электромотор воспроизводит тестовую импульсную последовательность. Датчик измеряет реакцию перемещения рулевого колеса. Реакция перемещения рулевого колеса используется электронным блоком управления, чтобы принимать решение. Устройство для обнаружения контакта между руками водителя и рулевым колесом транспортного средства содержит электромотор и датчик для измерения текущего усилия на рулевом колесе и/или угла поворота рулевого колеса, связанные с рулевым колесом. Устройство имеет электронный блок управления. Электронный блок управления осуществляет управление электромотором и указанным датчиком. Достигается повышение надежности определения контакта рук водителя с рулевым колесом. 2 н. и 5 з.п. ф-лы, 2 ил.
1. Способ для обнаружения контакта между руками и рулевым колесом (12) транспортного средства, связанным с электромотором (14) для выборочного приложения усилия на рулевом колесе и с по меньшей мере одним датчиком (22) для измерения текущего усилия на рулевом колесе и/или угла поворота рулевого колеса, содержащий следующие этапы, на которых:
a) электромотор (14), управляемый электронным блоком (10) управления, воспроизводит (32) тестовую импульсную последовательность на рулевом колесе (12);
b) упомянутый по меньшей мере один датчик (22) для измерения текущего усилия на рулевом колесе и/или угла поворота рулевого колеса, управляемый электронным блоком (10) управления, измеряет реакцию перемещения рулевого колеса на тестовую импульсную последовательность;
c) реакция перемещения рулевого колеса используется электронным блоком (10) управления, чтобы принимать решение, находится или нет по меньшей мере одна из рук водителя в контакте с рулевым колесом (12).
2. Способ по п.1, при этом если этап c) не обнаруживает, что по меньшей мере одна из рук водителя находится в контакте с рулевым колесом (12), способ выполняется снова, предпочтительно с более сильной и/или длительной тестовой импульсной последовательностью, и при этом принимается решение, что ни одна из рук водителя не находится в контакте с рулевым колесом (12), только после предварительно определенного числа итераций, предпочтительно после третьей итерации, самое раннее.
3. Способ по п.1 или 2, при этом способ прерывается преждевременно, и определяется, что по меньшей мере одна рука находится в контакте с рулевым колесом (12), как только датчик угла поворота рулевого колеса и/или датчик (22) усилия на рулевом колесе обнаруживает перемещение рулевого колеса и/или усилие на рулевом колесе, которые могут быть характерны для перемещения рулевого колеса водителем, и/или как только определяется операция элемента управления, скомпонованного на рулевом колесе.
4. Способ по п.1 или 2, при этом тестовые импульсные последовательности формируются, относительно профиля и амплитуды сигнала, таким образом, что они не оказывают постоянного влияния на угол поворота рулевого колеса, и/или при этом применение тестовой импульсной последовательности, по существу, не может восприниматься водителем, по меньшей мере, во время первого запуска способа.
5. Способ по п.1 или 2, при этом тестовая импульсная последовательность формируется посредством периодического сигнала, имеющего профиль сигнала, который, по существу, симметричен в обоих направлениях руления.
6. Способ по п.1 или 2, при этом частота тестовой импульсной последовательности соответствует, по существу, резонансной частоте крутильных колебаний рулевого колеса (12), которые не гасятся водителем.
7. Устройство для обнаружения контакта между руками водителя и рулевым колесом (12) транспортного средства, содержащее электромотор (14) для выборочного приложения усилия на рулевом колесе и по меньшей мере один датчик (22) для измерения текущего усилия на рулевом колесе и/или угла поворота рулевого колеса, связанные с рулевым колесом (12), при этом устройство имеет электронный блок (10) управления, осуществляющий управление электромотором (14) и по меньшей мере одним датчиком (22) для измерения текущего усилия на рулевом колесе и/или угла поворота рулевого колеса, который предназначен для того, чтобы выполнять способ по одному из предшествующих пунктов.
| JP H10236182 A, 08.09.1998 | |||
| DE 3919990 A1, 21.12.1989 | |||
| JP 2002160658 A, 04.06.2002 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО РУЛЕВОГО УПРАВЛЕНИЯ | 2005 |
|
RU2384449C2 |

