Область техники
[0001] Настоящее изобретение относится к технике управления, предназначенной для приведения в действие электродвигателя (в дальнейшем именуемого двигателем) от коммерческого источника питания в рамках способа управления, в котором запускают двигатель с использованием преобразователя мощности, синхронизируют преобразователь мощности и коммерческий источник питания и переключают режим управления двигателя с привода от преобразователя мощности к приводу от коммерческого источника питания.
Уровень техники
[0002] В системе для привода двигателя от коммерческого источника питания или магистральной сети, операция пуска облегчается в режиме пуска с непосредственным подключением к линии (пуск при полном напряжении). В этом случае, однако, пусковой вращающий момент достигает 200%~300% от оценочного или номинального вращающего момента, и пусковой ток достигает 600%~800% от номинального тока двигателя. Поэтому операция пуска в этом режиме требует большой мощности коммерческого источника питания, достаточной для необходимого пускового тока.
[0003] Для уменьшения мощности коммерческого источника питания имеется режим пуска двигателя с использованием преобразователя мощности (ниже называемого инвертором INV), содержащего секцию прямого преобразования для преобразования переменного тока (ас) в постоянный (dc) и секцию обратного преобразования для преобразования постоянного тока в переменный и синхронизации выхода инвертора INV с коммерческим источником питания.
[0004] Инвертор INV выполняет функцию управления выходным напряжением или выходным током. Соответственно, способ с использованием инвертора INV может уменьшить пусковой ток до нижнего значения, которое ниже, чем уровень тока при способе запуска с непосредственным подключением к линии, и следовательно уменьшает необходимую мощность коммерческого источника питания.
[0005] При операции запуска двигателя с использованием инвертора INV система синхронизирует выходную частоту и выходное напряжение инвертора INV с выходной частотой и выходным напряжением коммерческого источника питания и переключает работу двигателя с привода от инвертора, или привода с использованием инвертора INV, на привод от коммерческого источника питания, или привод с использованием коммерческого источника питания. Эта операция поясняется на фиг. 1, где схематично показано устройство для управления синхронизацией преобразователя мощности.
[0006] Во время пуска двигателя система управляет инвертором INV, выключая переключатель S1 "включен/выключен" (разомкнутое/замкнутое состояние) коммерческого источника 1 питания и включая переключатель 2 "включен/выключен" инвертора INV, и таким образом подавая электричество из инвертора INV в двигатель М. При подаче мощности из инвертора INV двигатель М увеличивает свою угловую скорость.
[0007] Затем, после того, как угловая скорость двигателя М достигнет заранее заданного значения, система подает мощность из коммерческого источника 1 питания в двигатель М, включая переключатель "включен/выключен" S1 коммерческого источника 1 питания и выключая переключатель "включен/выключен" S2 инвертора INV.
[0008] Когда во время переключения от привода инвертора INV к приводу коммерческого источника 1 питания выход коммерческого источника 1 питания и выход инвертора INV не синхронизированы, возникает возможность перегрузки по току и напряжению и остановки инвертора 1 с выходом из строя средств переключения. Поэтому необходимо точно синхронизировать выходное напряжение коммерческого источника 1 питания и выхода инвертора INV.
[0009] В документах 1 и 2 раскрыт способ переключения, кратко поясняемый ниже. Этот способ переключения включает операцию регулировки фазы после того, как частота выходного напряжения инвертора INV синхронизирована с частотой выходного напряжения коммерческого источника 1 питания, и операцию переключения режима привода на привод от коммерческого источника 1 питания путем наложения выходного напряжения инвертора INV и выходного напряжения коммерческого источника 1 питания, когда после регулировки фазы принято решение, что выходное напряжение инвертора INV синхронизировано с выходным напряжением коммерческого источника 1 питания.
[0010] На фиг. 16 показана ситуация, в которой, на стадии совпадения, или согласования, по частоте вектор выходного напряжения (фаза) инвертора INV опережает вектор выходного напряжения коммерческого источника 1 питания. Частоту можно варьировать для регулировки фазы различными способами. В любом случае для регулировки фазы необходимо некоторое время.
[0011] Однако при переключении, которое выполняется в состоянии синхронизации по фазе во время периода перекрытия выходного напряжения инвертора INV и выходного напряжения коммерческого источника 1 питания, если имеется девиация от фактической фазы вследствие погрешности управления, фазовый сдвиг между фазой выходного напряжения инвертора INV и фазой выходного напряжения коммерческого источника 1 питания стремится превысить допустимый диапазон и вызвать перекрестный ток, о котором будет сказано ниже. Следовательно, могут иметь место избыточный ток и избыточное напряжение, что может привести к отказу и остановке преобразователя INV.
[0012] В патентном документе 1 предложено устройство для решения этой проблемы. Однако это устройство из патентного документа 1 недостаточно эффективно для предотвращения избыточного тока, потому что управление током в инверторе INV не производится непосредственно во время операции переключения.
[0013] Поэтому задачей устройства для управления синхронизацией является выполнение более точного управления током и обеспечение стабильных рабочих характеристик при переключении с привода от преобразователя мощности к приводу от коммерческого источника питания.
Документы, относящиеся к известному уровню техники
Патентные документы
[0014]
Патентный Документ 1: JP 2006-149136 А
Патентный Документ 2: JP 2007-228738 А
Сущность изобретения
[0015] Согласно одному аспекту настоящего изобретения, разработанного с учетом вышеуказанных проблем, присущих известным техническим решениям, устройство управления синхронизацией преобразователя мощности для подачи электричества из коммерческого источника питания в двигатель содержит: первый переключатель "включен/выключен", установленный между коммерческим источником питания и двигателем; последовательную цепь, которая включена параллельно первому переключателю "включен/выключен" и которая содержит преобразователь мощности, реактор переменного тока и второй переключатель "включен/выключен"; секцию управления синхронизацией, предназначенную для управления преобразователем мощности от момента пуска двигателя до тех пор, пока выходное напряжение коммерческого источника питания и выходное напряжение преобразователя мощности не будут синхронизированы друг с другом; и секцию управления на основе синхронного тока коммерческого источника питания, предназначенную для управления преобразователем мощности после установления синхронизации между выходным напряжением коммерческого источника питания и выходным напряжением преобразователя мощности; при этом устройство управления синхронизацией преобразователя мощности выполнено с возможностью переключения управления от первого управления преобразователем мощности с помощью секции управления синхронизацией ко второму управлению преобразователем мощности с помощью секции управления на основе синхронного тока коммерческого источника питания; при этом секция управления синхронизацией управляет работой преобразователя мощности в режиме управления V/f путем установки первого переключателя "включен/выключен" в разомкнутое состояние, а второго переключателя "включен/выключен" в замкнутое состояние; при этом секция управления на основе синхронного тока коммерческого источника питания управляет работой преобразователя мощности в режиме управления V/f путем установки первого переключателя "включен/выключен" в разомкнутое состояние, а второго переключателя "включен/выключен" в замкнутое состояние сразу после переключения от первого управления с помощью секции управления синхронизацией преобразователя мощности, чтобы затем изменить управление преобразователем мощности на управление током на основе измеренного тока на выходе преобразователя мощности, а затем подавать электроэнергию в двигатель как из преобразователя мощности, так и из коммерческого источника питания путем установки первого переключателя "включен/выключен" в замкнутое состояние, а затем обеспечить подачу электроэнергии из коммерческого источника питания в двигатель путем установки второго переключателя "включен/выключен" в разомкнутое состояние.
[0016] Согласно еще одному аспекту настоящего изобретения, секция управления на основе синхронного тока коммерческого источника питания содержит: секцию преобразования трех фаз в две фазы, предназначенную для преобразования трехфазных измеренных токов, которые представляют собой измеренные значения трехфазных выходных токов преобразователя мощности, в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания; переключатель перехода, предназначенный для вывода измеренного тока вдоль оси d и измеренного тока вдоль оси q в виде командного тока вдоль оси d и командного тока вдоль оси q во время режима управления V/f, и вывода предыдущего командного тока вдоль оси d, который представляет собой предыдущее значение командного тока вдоль оси d на одну выборку назад, и предыдущего командного тока вдоль оси q, который представляет собой предыдущее значение командного тока вдоль оси q на одну выборку назад, в качестве командного тока вдоль оси d и командного тока вдоль оси q во время управления током; секцию управления током, выдающую командное напряжение вдоль оси d и командное напряжение вдоль оси q в соответствии с девиацией между током, измеренным вдоль оси d, и командным током вдоль оси d и девиацией между измеренным током вдоль оси q и командным током вдоль оси q; и; и секцию преобразования двух фаз в три фазы, предназначенную для преобразования командного напряжения вдоль оси d и командного напряжения вдоль оси q в трехфазные командные напряжения в соответствии с элементом информации о фазе коммерческого источника питания.
[0017] Согласно еще одному аспекту настоящего изобретения, секция управления на основе синхронного тока коммерческого источника питания содержит: секцию преобразования трех фаз в две фазы, предназначенную для преобразования трехфазных измеренных токов, которые представляют собой измеренные значения трехфазных выходных токов преобразователя мощности, в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания; переключатель перехода, предназначенный для вывода измеренного тока вдоль оси d и измеренного тока вдоль оси q в виде командного тока вдоль оси d и командного тока вдоль оси q во время режима управления V/f, и вывода предыдущего командного тока вдоль оси d, который представляет собой предыдущее значение командного тока вдоль оси d на одну выборку назад, и предыдущего командного тока вдоль оси q, который представляет собой предыдущее значение командного тока вдоль оси q на одну выборку назад, в качестве командного тока вдоль оси d и командного тока вдоль оси q во время управления током; секцию преобразования двух фаз в три фазы, предназначенную для преобразования командного напряжения вдоль оси d и командного напряжения вдоль оси q в трехфазные командные напряжения в соответствии с элементом информации о фазе коммерческого источника питания; и секцию управления током, предназначенную для вывода командного трехфазного напряжения в соответствии с девиацией между измеренными трехфазными токами и командными трехфазными токами.
[0018] Согласно еще одному аспекту настоящего изобретения, секция управления на основе синхронного тока коммерческого источника питания содержит: секцию преобразования трех фаз в две фазы, предназначенную для преобразования трехфазных измеренных токов, которые представляют собой измеренные значения трехфазных выходных токов преобразователя мощности, в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания; переключатель перехода, предназначенный для вывода измеренного тока вдоль оси d и измеренного тока вдоль оси q в виде командного тока вдоль оси d и командного тока вдоль оси q во время режима управления V/f, и вывода предыдущего командного тока вдоль оси d, который представляет собой предыдущее значение командного тока вдоль оси d на одну выборку назад, и предыдущего командного тока вдоль оси q, который представляет собой предыдущее значение командного тока вдоль оси q на одну выборку назад, в качестве командного тока вдоль оси d и командного тока вдоль оси q во время управления током; секцию управления током, выдающую командное напряжение вдоль оси d и командное напряжение вдоль оси q в соответствии с девиацией между током, измеренным вдоль оси d, и командным током вдоль оси d и девиацией между измеренным током вдоль оси q и командным током вдоль оси q; секцию компенсации ошибки выходного напряжения, предназначенную для вывода разности, полученной путем вычитания произведения, полученного умножением индуктивности реактора переменного тока, компоненты угловой частоты и измеренного тока вдоль оси q, из командного напряжения вдоль оси d в качестве финального командного напряжения вдоль оси d, и для вывода суммы, полученной сложением произведения индуктивности реактора переменного тока, компоненты угловой частоты и измеренного тока вдоль оси d с командным напряжением вдоль оси q в качестве финального командного напряжения вдоль оси q, и секцию преобразования двух фаз в три фазы, предназначенную для преобразования финального командного напряжения вдоль оси d и финального командного напряжения вдоль оси q в трехфазные командные напряжения в соответствии с элементом информации о фазе коммерческого источника питания.
[0019] Согласно еще одному аспекту настоящего изобретения, секция управления на основе синхронного тока коммерческого источника питания содержит: секцию преобразования трех фаз в две фазы, предназначенную для преобразования трехфазных измеренных токов, которые представляют собой измеренные значения трехфазных выходных токов преобразователя мощности, в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания; переключатель перехода, предназначенный для вывода измеренного тока вдоль оси d и измеренного тока вдоль оси q в виде командного тока вдоль оси d и командного тока вдоль оси q во время режима управления V/f, и вывода предыдущего командного тока вдоль оси d, который представляет собой предыдущее значение командного тока вдоль оси d на одну выборку назад, и предыдущего командного тока вдоль оси q, который представляет собой предыдущее значение командного тока вдоль оси q на одну выборку назад, в качестве командного тока вдоль оси d и командного тока вдоль оси q во время управления током; секцию управления током, выдающую командное напряжение вдоль оси d и командное напряжение вдоль оси q в соответствии с девиацией между током, измеренным вдоль оси d, и командным током вдоль оси d и девиацией между измеренным током вдоль оси q и командным током вдоль оси q; секцию компенсации ошибки выходного напряжения, предназначенную для вывода разности, полученной путем вычитания произведения, полученного умножением индуктивности реактора переменного тока, компоненты угловой частоты и командного тока вдоль оси q из командного напряжения вдоль оси d, в качестве финального командного напряжения вдоль оси d, и для вывода суммы, полученной сложением произведения индуктивности реактора переменного тока, компоненты угловой частоты и командного тока вдоль оси d с командным напряжением вдоль оси q, как финального командного напряжения вдоль оси q, и секцию преобразования двух фаз в три фазы, предназначенную для преобразования финального командного напряжения вдоль оси d и финального командного напряжения вдоль оси q в трехфазные командные напряжения в соответствии с элементом информации о фазе коммерческого источника питания.
[0020] Согласно еще одному аспекту настоящего изобретения, секция управления на основе синхронного тока коммерческого источника питания содержит: секцию преобразования трех фаз в две фазы, предназначенную для преобразования трехфазных измеренных токов, которые представляют собой измеренные значения трехфазных выходных токов преобразователя мощности, в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания; переключатель перехода, предназначенный для вывода измеренного тока вдоль оси d и измеренного тока вдоль оси q в виде командного тока вдоль оси d и командного тока вдоль оси q во время режима управления V/f, и вывода предыдущего командного тока вдоль оси d, который представляет собой предыдущее значение командного тока вдоль оси d на одну выборку назад, и предыдущего командного тока вдоль оси q, который представляет собой предыдущее значение командного тока вдоль оси q на одну выборку назад, в качестве командного тока вдоль оси d и командного тока вдоль оси q во время управления током; секцию управления током, выдающую командное напряжение вдоль оси d и командное напряжение вдоль оси q в соответствии с девиацией между током, измеренным вдоль оси d, и командным током вдоль оси d и девиацией между измеренным током вдоль оси q и командным током вдоль оси q; секцию компенсации ошибки выходного напряжения, предназначенную для вычисления значения компенсации падения напряжения путем умножения индуктивности реактора переменного тока, компоненты угловой частоты и тока в нагрузке привода во время синхронизации на основе коммерческого источника с вычислением θcomp=tan-1 (командный ток вдоль оси d/командный ток вдоль оси q) в соответствии с командным током вдоль оси d и командным током вдоль оси q, для вычисления компоненты компенсации падения напряжения вдоль оси d путем умножения значения компенсации падения напряжения и sin(θcomp), для вычисления компоненты компенсации падения напряжения вдоль оси q путем умножения значения компенсации падения напряжения и cos(θcomp) с выводом разности, полученной вычитанием компоненты компенсации падения напряжения вдоль оси d из командного напряжения вдоль оси d, как финального командного напряжения вдоль оси d, и вывода суммы, полученной сложением компоненты компенсации падения напряжения вдоль оси q и командного напряжения вдоль оси q, как финального командного напряжения вдоль оси q; и секцию преобразования двух фаз в три фазы, предназначенную для преобразования финального командного напряжения вдоль оси d и финального командного напряжения вдоль оси q в трехфазные командные напряжения в соответствии с элементом информации о фазе коммерческого источника питания; при этом по меньшей мере одно из тока в нагрузке привода во время синхронизации на основе коммерческого источника питания и угловой частотной составляющей является постоянным значением.
[0021] Согласно еще одному аспекту настоящего изобретения, секция компенсации погрешности выходного напряжения устанавливает ток вдоль оси q или командный ток вдоль оси q равным нулю, если абсолютная величина тока вдоль оси q и командный ток вдоль оси q меньше или равен заранее заданному значению.
[0022] Согласно еще одному аспекту настоящего изобретения, устройство для управления синхронизацией преобразователя мощности дополнительно содержит переключатель перехода, предназначенный для приема командного напряжения вдоль оси d, командного напряжения вдоль оси q, финального командного напряжения вдоль оси d, и финального командного напряжения вдоль оси q и для вывода финального командного напряжения вдоль оси d и финального командного напряжения вдоль оси q в секцию преобразования двух фаз в три фазы во время режима управления V/f, и командного напряжения вдоль оси d и командного напряжения вдоль оси q в секцию преобразования двух фаз в три фазы во время управления током.
[0023] Согласно еще одному аспекту настоящего изобретения, секция управления на основе синхронного тока коммерческого источника питания содержит: фильтр нижних частот, предназначенный для удаления высокочастотной компоненты (компонентов) в измеренном токе вдоль оси d и измеренном токе вдоль оси q и для подачи измеренного тока вдоль оси d и измеренного тока вдоль оси q в переключатель перехода.
[0024] Согласно еще одному аспекту настоящего изобретения, секция управления на основе синхронного тока коммерческого источника питания уменьшает командный ток вдоль оси d и командный ток вдоль оси q после заранее заданного временного периода от переключения до управления током.
[0025] Согласно еще одному аспекту настоящего изобретения, секция управления на основе синхронного тока коммерческого источника питания уменьшает командный ток вдоль оси q до нуля, а после этого уменьшает командный ток вдоль оси d до нуля.
[0026] Согласно еще одному аспекту настоящего изобретения, секция управления на основе синхронного тока коммерческого источника питания изменяет элемент информации о фазе коммерческого источника питания плавно от фазы выходного напряжения преобразователя мощности к фазе выходного напряжения коммерческого источника питания, когда имеется ошибка или разность между фазой выходного напряжения преобразователя мощности и фазой выходного напряжения коммерческого источника питания.
[0027] Согласно еще одному аспекту настоящего изобретения, секция преобразования двух фаз в три фазы преобразует командное напряжение вдоль оси d и командное напряжение вдоль оси q к трехфазным командным напряжениям в соответствии с фазой выходного напряжения преобразователя мощности во время режима управления V/f, и преобразует командное напряжение вдоль оси d и командное напряжение вдоль оси q к трехфазным командным напряжениям в соответствии с элементом информации о фазе коммерческого источника питания во время управления током, а секция преобразования трех фаз в две фазы преобразует трехфазные измеренные токи в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с фазой выходного напряжения преобразователя мощности во время режима управления V/f, и преобразует трехфазные измеренные токи в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания во время управления током.
[0028] Согласно настоящему изобретению, в устройстве управления синхронизацией для инвертора можно выполнить управление током более точно и переключить работу от привода от преобразователя мощности к приводу от коммерческого источника питания с большей стабильностью.
Краткое описание чертежей
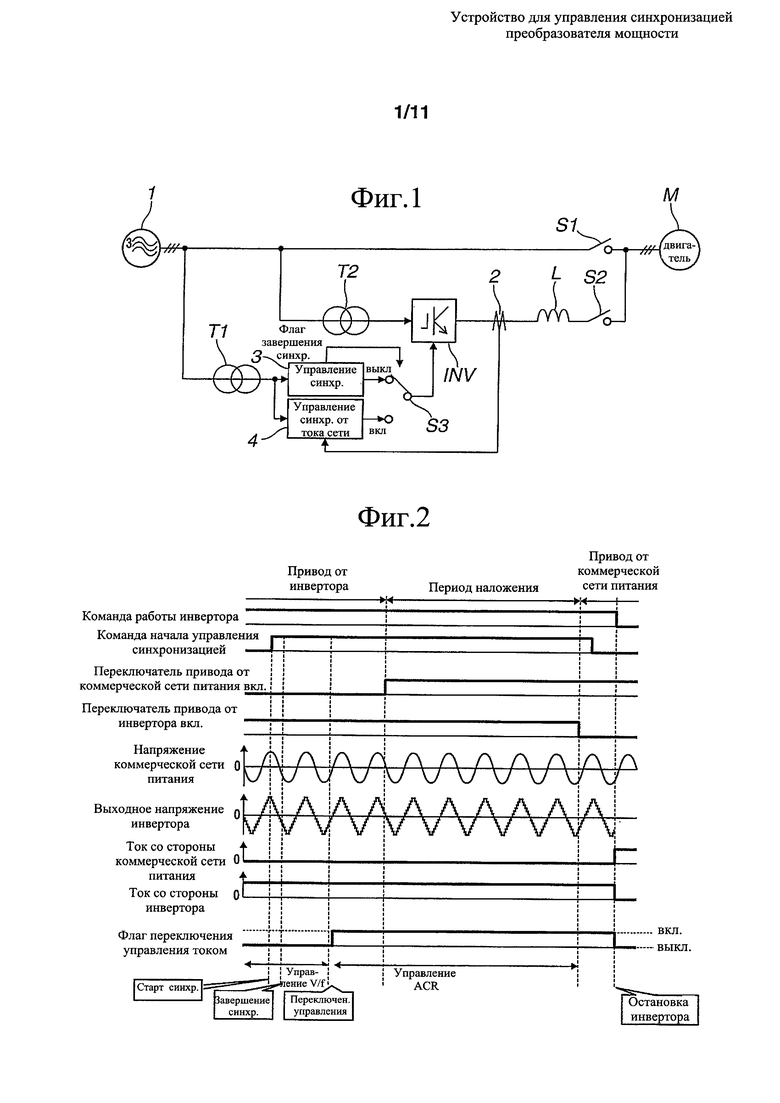
[0029] На фиг. 1 схематично показано устройство управления синхронизацией преобразователя мощности согласно первому варианту выполнения настоящего изобретения.
На фиг. 2 показаны временные графики, иллюстрирующие операции по управлению синхронизацией согласно первому варианту выполнения настоящего изобретения.
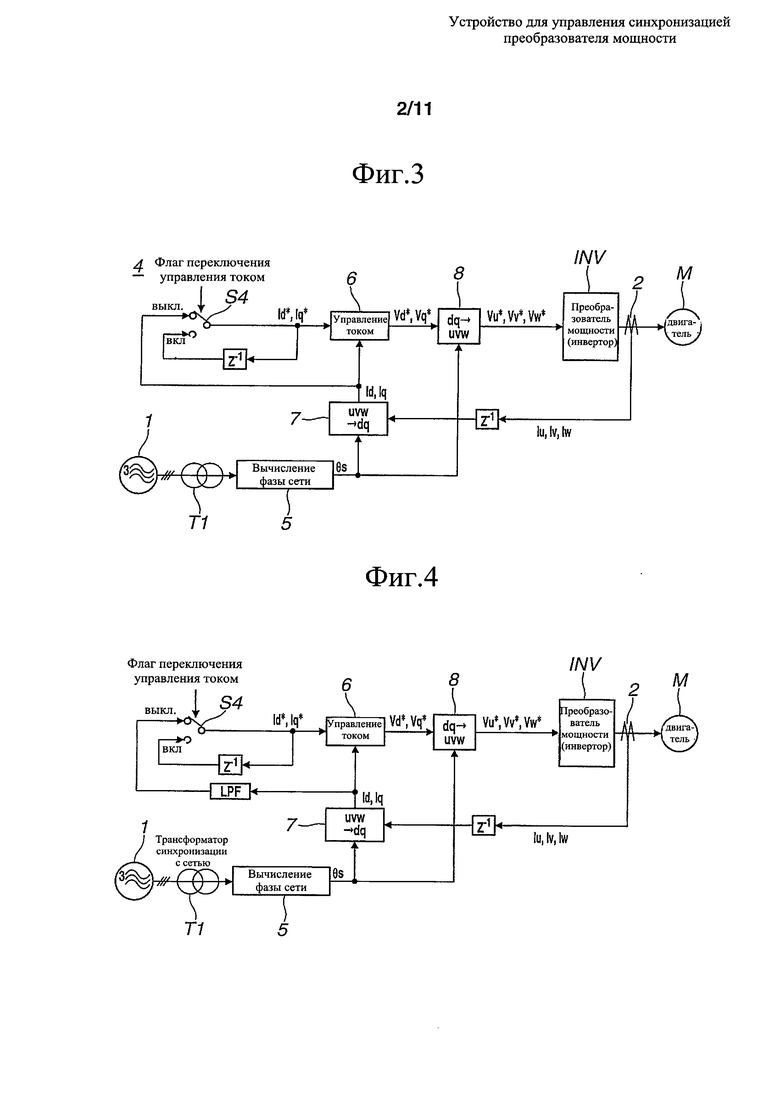
На фиг. 3 показана блок-схема секции управления на основе синхронного тока коммерческого источника питания согласно первому варианту выполнения настоящего изобретения.
На фиг. 4 показана блок-схема секции управления на основе синхронного тока коммерческого источника питания согласно второму варианту выполнения настоящего изобретения.
На фиг. 5 показана блок-схема секции управления на основе синхронного тока коммерческого источника питания согласно третьему варианту выполнения настоящего изобретения.
На фиг. 6 показана блок-схема секции процесса уменьшения согласно третьему варианту выполнения настоящего изобретения.
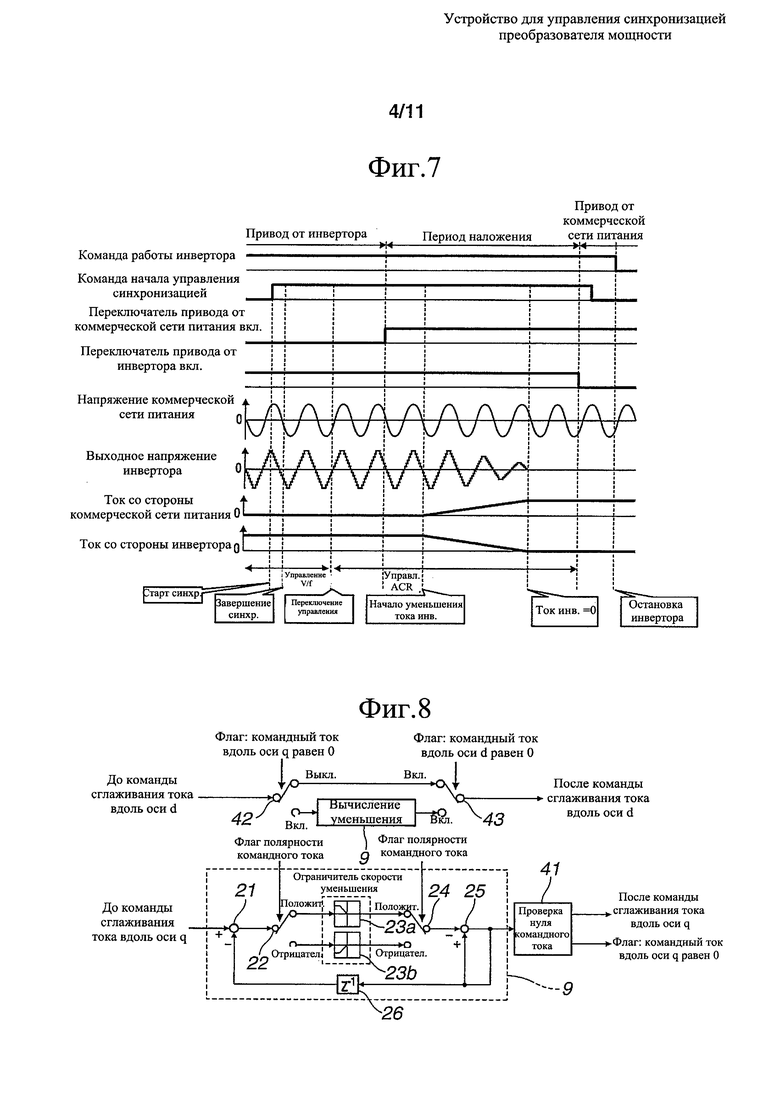
На фиг. 7 показаны временные графики, иллюстрирующие операции по управлению синхронизацией согласно третьему варианту выполнения настоящего изобретения.
На фиг. 8 показана блок-схема секции процесса уменьшения согласно четвертому варианту выполнения настоящего изобретения.
На фиг. 9 показана блок-схема секции управления на основе синхронного тока коммерческого источника питания согласно пятому варианту выполнения настоящего изобретения.
На фиг. 10 показана блок-схема, демонстрирующая секцию ограничения скорости изменения согласно пятому варианту выполнения настоящего изобретения.
На фиг. 11 показаны координаты α-β и координаты d-q.
На фиг. 12 показаны координаты, вращающиеся синхронно с частотой первичной обмотки двигателя и фазой коммерческой источника питания.
На фиг. 13 схематично показана секция управления на основе синхронного тока коммерческого источника питания согласно шестому варианту выполнения настоящего изобретения.
На фиг. 14 показана блок-схема, демонстрирующая секцию выбора осей координат согласно шестому варианту выполнения настоящего изобретения.
На фиг. 15 схематично показана секция управления на основе синхронного тока коммерческого источника питания согласно седьмому варианту выполнения настоящего изобретения.
На фиг. 16 показан вектор выходного напряжения инвертора, при этом вектор напряжения коммерческого источника питания отложен в направлении оси α.
На фиг. 17 показана векторная диаграмма выходного напряжения инвертора.
На фиг. 18 показана блок-схема, демонстрирующая секцию управления на основе синхронного тока коммерческого источника питания согласно восьмому варианту выполнения настоящего изобретения.
На фиг. 19 показана блок-схема, демонстрирующая секцию компенсации ошибки выходного напряжения вдоль оси d согласно восьмому варианту выполнения настоящего изобретения.
На фиг. 20 показана блок-схема, демонстрирующая секцию компенсации ошибки выходного напряжения вдоль оси q согласно восьмому варианту выполнения настоящего изобретения.
На фиг. 21 показана блок-схема, демонстрирующая секцию компенсации ошибки выходного напряжения вдоль оси q согласно девятому варианту выполнения настоящего изобретения.
На фиг. 22 показана блок-схема, демонстрирующая секцию управления на основе синхронного тока коммерческого источника питания согласно десятому варианту выполнения настоящего изобретения.
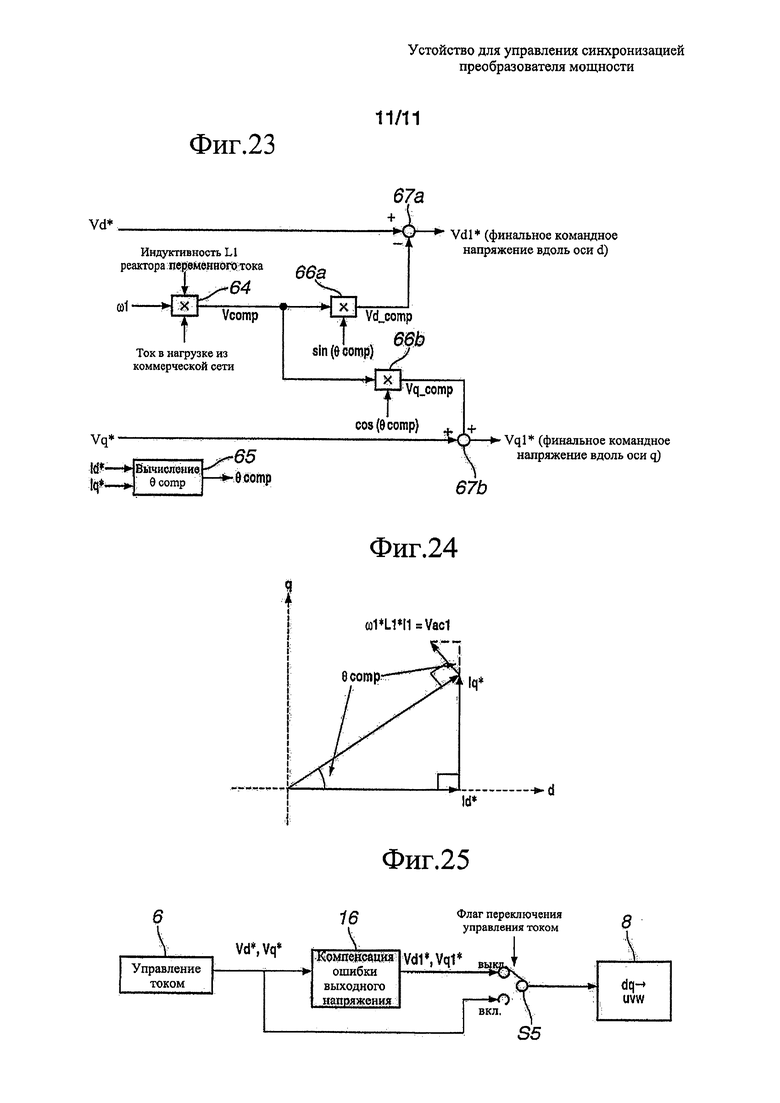
На фиг. 23 показана блок-схема, демонстрирующая секцию компенсации ошибки выходного напряжения согласно одиннадцатому варианту выполнения настоящего изобретения.
На фиг. 24 показана векторная диаграмма, демонстрирующая токи вдоль оси d и вдоль оси q и падение напряжения на реакторе переменного тока.
На фиг. 25 показана блок-схема, демонстрирующая часть секции управления на основе синхронного тока коммерческого источника питания согласно двенадцатому варианту выполнения настоящего изобретения.
Способы реализации настоящего изобретения
[0030] Ниже подробно описано устройство управления синхронизацией преобразователя мощности согласно настоящему изобретению на примере вариантов 1-12 его выполнения, которые показаны на фиг. 1-25.
[0031] [Вариант 1 выполнения настоящего изобретения]
На фиг. 1 схематично показано устройство управления синхронизацией преобразователя мощности согласно первому варианту выполнения настоящего изобретения. Коммерческий источник 1 питания или магистральная сеть представляет собой трехфазный источник переменного тока. Переключатель S1 типа "включен/выключен" (или "разомкнут/замкнут") для подключения коммерческого источника 1 питания установлен между коммерческим источником 1 питания и двигателем М. Последовательная цепь идет параллельно переключателю S1 "включен/выключен". Эта последовательная цепь представляет собой последовательную комбинацию входного трансформатора Т2, инвертора INV, реактора L переменного тока и переключателя S2 "включен/выключен" (или разомкнут/замкнут) для инвертора INV. На выходной стороне инвертора INV имеется датчик 2 тока, предназначенный для получения значения трехфазного измеренного тока Iu, Iv и Iw инвертора INV. Переключатели S1 и S2 "включен/выключен" включают или выключают для изменения питания двигателя между приводом от коммерческого источника питания, т.е. приводом от коммерческого источника 1 питания, и приводом от инвертора, т.е. приводом от инвертора INV.
[0032] Реактор L переменного тока предназначен для уменьшения тока, обусловленного разностью потенциалов и сдвигом фаз между выходным напряжением коммерческого источника 1 питания и выходным напряжением инвертора INV во время переключения между приводом от инвертора INV и приводом от коммерческого источника 1 питания.
[0033] Трансформатор Т1 синхронизации с коммерческим источником питания установлен так, что измеряет выходное напряжение коммерческого источника 1 питания. При использовании информации о коммерческом источнике 1 питания (амплитуда, фаза, частота и т.д. выходного напряжения коммерческого источника 1 питания), измеренного трансформатором Т1 синхронизации с коммерческим источником питания, секция 3 управления синхронизацией и секция 4 управления на основе синхронного тока коммерческого источника питания осуществляют управление синхронизацией инвертора INV. Переключатель S3 выполняет переключение в соответствии с флагом завершения синхронизации, выдаваемым секцией 3 управления синхронизацией. Пока флаг завершения синхронизации не установлен (во время от момента запуска двигателя до установления синхронизации между выходным напряжением коммерческого источника 1 питания и выходным напряжением преобразователя мощности), переключатель S3 находится в состоянии выкл., и поэтому секция 3 управления синхронизацией управляет инвертором INV. После того, как флаг завершения синхронизации установлен (после установления синхронизации между выходным напряжением коммерческого источника 1 питания и выходным напряжением преобразователя мощности), переключатель S3 находится в состоянии вкл., и поэтому секция 4 управления на основе синхронного тока коммерческого источника питания управляет инвертором INV.
[0034] В дальнейшем в этом описании ток, генерируемый разностью потенциалов и сдвигом фаз между выходным напряжением коммерческого источника 1 питания и выходным напряжением инвертора INV, называется перекрестным током. На фиг. 2 иллюстрируется управление синхронизацией тока коммерческого источника питания. Флаг завершения синхронизации (sync) установлен в момент "завершения синхронизации" (sync completion), показанный на фиг. 2.
[0035] На фиг. 3 показана блок-схема секции 4 управления на основе синхронного тока коммерческого источника питания. Как показано на фиг. 3, секция 4 управления на основе синхронного тока коммерческого источника питания содержит первый буфер Z-1, секцию 5 вычисления фазы коммерческого источника питания, секцию 7 преобразования трех фаз в две фазы, второй буфер Z-1, переключатель S4 перехода, секцию 6 управления током и секцию 8 преобразования двух фаз в три фазы. Первый буфер Z-1 выдает предыдущие значения для одной выборки предыдущих трехфазных измеренных токов Iu, Iv, Iw. Таким образом, предыдущие значения трехфазных измеренных токов Iu, Iv, Iw - это значения, полученные непосредственно в предыдущей выборке. Секция 5 вычисления фазы коммерческого источника питания вычисляет фазу θs или элемент θs информации о фазе выходного напряжения коммерческого источника 1 питания. В соответствии с элементом θs информации о фазе выходного напряжения коммерческого источника 1 питания, секция 7 преобразователя трех фаз в две фазы преобразует предыдущие значения трехфазных измеренных токов, Iu, Iv и Iw, полученные в предыдущей выборке, в измеренный ток Id вдоль оси d и измеренный ток Iq вдоль оси q. Второй буфер Z-1 выдает предыдущие значения командного тока Id* вдоль оси d и командного тока Iq* вдоль оси q, полученные в предыдущей выборке. В соответствии с флагом переключения управления током, переключатель S4 перехода выдает измеренный ток Id вдоль оси d и измеренный ток Iq вдоль оси q в качестве командного тока Id* вдоль оси d и командного тока Iq* вдоль оси q во время управления V/f, и выводит предыдущие значения командного тока Id* вдоль оси d и командного тока Iq* вдоль оси q (выходы второго буфера Z-1) в качестве командного тока Id* вдоль оси d и командного тока Iq* вдоль оси q во время управления током. Секция 6 управления током выдает командное напряжение Vd* вдоль оси d и командное напряжение Vq* вдоль оси q в соответствии с девиацией между измеренным током Id вдоль оси d и командным током Id* вдоль оси d и девиацией между измеренным током Iq вдоль оси q и командным током Iq* вдоль оси q. В соответствии с элементом θs информации о фазе коммерческого источника 1 питания секция 8 преобразования двух фаз в три фазы преобразует командное напряжение Vd* вдоль оси d и командное напряжение Vq* вдоль оси q в трехфазные командные напряжения Vu*, Vv* и Vw*. Инвертором INV управляют трехфазные командные напряжения Vu*, Vv* и Vw*, вырабатываемые секцией 8 преобразования двух фаз в три фазы. В примере на фиг. 2 флаг переключения тока включен или установлен в положение вкл. в момент одного цикла выходного напряжения инвертора после момента выбора «завершение синхронизации» (sync completion). Момент включения флага переключения управления током не ограничен моментом, показанным в примере на фиг. 2.
[0036] В качестве командных значений секция 6 управления током использует значения измеренного тока Id вдоль оси d и измеренного тока Iq вдоль оси q непосредственно перед переключением с управления V/f (управления, которое стремится сделать постоянным отношение выходное напряжение/выходная частота инвертора INV) к управлению током (управления ACR на фиг. 2). Поэтому до момента, когда флаг переключения управления током установлен, команды управления током определяют путем продолжения обновления измеренного тока Id вдоль оси d и измеренного тока Iq вдоль оси q. После включения флага переключения управления током предыдущие значения командного тока Id* вдоль оси d и командного тока Iq* вдоль оси q (то есть, значения измеренного тока Id вдоль оси d и измеренного тока Iq вдоль оси q непосредственно перед включением флага управления переключения током) остаются неизменными непрерывно.
[0037] Командные трехфазные напряжения Vu*, Vv* и Vw* инвертора INV во время завершения синхронизации равны значениям, полученным регулировкой амплитуды напряжения и фазы коммерческого источника 1 питания, а следовательно даны следующим выражением (1).
[0038]
[0039] В этом математическом выражении, V - эффективное значение напряжения, θ - фаза выходного напряжения инвертора INV, и V установлено равным эффективному значению выходного напряжения коммерческого источника 1 питания. В этом случае трехфазные измеренные токи Iu, Iv и Iw, текущие через двигатель М, определены как следующие математические выражения (2).
[0040]
[0041] В этом выражении I - эффективное значение измеренного тока.
[0042] В этом случае секция 7 преобразования трех фаз в две фазы выполняет координатное преобразование трехфазных измеренных токов Iu, Iv и Iw к измеренному току Id вдоль оси d и измеренному току Iq вдоль оси q с использованием формулы преобразования координат, определяемой математическим выражением (3). Фаза θs коммерческого источника 1 питания используется в качестве элемента информации о фазе, необходимой для преобразования координат.
[0043]

[0044] В этом выражении θs - элемент информации о фазе коммерческого источника 1 питания.
[0045] Измеренный ток Id вдоль оси d и измеренные ток Iq вдоль оси q даются следующим выражением (4).
[0046]

[0047] Во время переключения с привода от инвертора INV к приводу от коммерческого источника 1 питания синхронизация между выходным напряжением инвертора INV и выходным напряжением коммерческого источника 1 питания завершается. Поэтому разность между фазой выходного напряжения коммерческого источника 1 питания и фазой выходного напряжения инвертора INV является незначительной, а следовательно предположение, что они равны друг другу, не оказывает почти никакого влияния на управление.
[0048] Соответственно, предполагается, что θ=θs. В этом случае измеренный ток Id вдоль оси d и измеренный ток Iq вдоль оси q даются следующим выражением (5).
[0049]

[0050] Секция 6 управления током вырабатывает командное напряжение Vd* вдоль оси d и командное напряжение Vq* вдоль оси q, выполняя пропорциональное и интегральное управление (управление PI) на основе разности между командным током Id* вдоль оси d и измеренным током Id вдоль оси d и разности между командным током Iq* вдоль оси q и измеренным током Iq вдоль оси q. Когда на входы секции 6 управления током поданы Id=√3I и Iq=0, как в выражении (5), командное напряжение Vd* вдоль оси d и командное напряжение Vq* вдоль оси q, выработанные секцией 6 управления током, определяются следующим выражением (6).
[0051]

[0052] Затем секция 8 преобразования двух фаз в три фазы преобразует командное напряжение Vd* вдоль оси d и командное напряжение Vq* вдоль оси q в командные трехфазные напряжения Vu*, Vv* и Vw* с использованием формулы преобразования координат, даваемой следующим выражением (7), где θs - фаза коммерческого источника 1 питания.
[0053]

[0054] В этом случае командные трехфазные напряжения Vu*, Vv* и Vw* даются следующим выражением (8).
[0055]

[0056] Инвертором INV управляют так, чтобы выходные напряжения инвертора INV были равны командным трехфазным напряжениям Vu*, Vv* и Vw* соответственно. В этом примере инвертор INV вырабатывает выходные напряжения, управляя переключением "включен/выключен" переключающего устройства (устройств) в инверторе с использованием сигнала (сигналов) сравнения между командными трехфазными напряжениями Vu*, Vv* и Vw* и волновым сигналом (сигналами) в конфигурации треугольника.
[0057] В этом случае выходное напряжение инвертора INV и выходное напряжение коммерческого источника 1 питания почти синхронны друг относительно друга по амплитуде напряжения и фазе, в результате чего не создается почти никакого перекрестного тока.
[0058] Как показано выше, устройство управления синхронизацией для преобразователя мощности согласно первому варианту выполнения настоящего изобретения обеспечивает надежное переключение с привода от инвертора INV к приводу от коммерческого источника 1 питания. Кроме того, при управлении током, в рамках которого измеряют выходной ток инвертора INV и поддерживают командный ток, устройство управления синхронизацией согласно первому варианту выполнения настоящего изобретения позволяет повысить точность управления и усилить ограничение перекрестного тока по сравнению с патентным документом 1.
[0059] Поэтому при работе по переключению с привода от преобразователя мощности к приводу от коммерческого источника питания преобразователь мощности может работать стабильно без отказов и остановки из-за перегрузки по току или напряжению. Соответственно, повышается надежность системы привода двигателя.
[0060] [Вариант 2 выполнения настоящего изобретения]
Во втором варианте выполнения настоящего изобретения к секции 4 управления на основе синхронного тока коммерческого источника питания из первого варианта выполнения настоящего изобретения добавлен фильтр нижних частот (LPF).
[0061] На фиг. 4 показана блок-схема секции 4 управления на основе синхронного тока коммерческого источника питания согласно второму варианту выполнения настоящего изобретения.
[0062] Как показано на фиг. 4, во втором варианте выполнения настоящего изобретения фильтр LPF нижних частот установлен между секцией 7 преобразования трех фаз в две фазы и переключателем S4 перехода. Измеренный ток Id вдоль оси d и измеренный ток Iq вдоль оси q могут включать компонент смещения вследствие остаточного магнитного потока НСТ [холловского датчика], используемого в качестве датчика тока, и ошибки по току датчика 2 тока, и 1-ой и 2-ой гармонических компонентов выходной частоты, генерируемых вследствие сдвига усиления по чувствительности. Кроме того, шум, накладываемый на датчик 2 тока, налагается также на измеренный ток Id вдоль оси d и измеренный ток Iq вдоль оси q.
[0063] Если эти помехи накладываются, измеренный ток Id вдоль оси d и измеренный ток Iq вдоль оси q отклоняются от правильных значений, которые следует использоваться в качестве командного тока Id* вдоль оси d и командного тока Iq* вдоль оси q. Соответственно, в случае управления током инвертор INV может быть не в состоянии сгенерировать ток, превышающий вращающий момент нагрузки, и двигатель М может остановиться.
[0064] Фильтр нижних частот LPF имеет функцию предотвращения прохождения высокочастотных компонент в измеренном токе Id вдоль оси d и измеренном токе Iq вдоль оси q. Поэтому фильтр нижних частот LPF устраняет вышеуказанные помехи, которые существуют в форме высокочастотной компоненты.
[0065] Как сказано выше, второй вариант выполнения настоящего изобретения обеспечивает те же самые операции и эффекты, что и первый вариант выполнения настоящего изобретения. Кроме того, второй вариант выполнения настоящего изобретения позволяет устранить помехи, даже если вследствие наличия компоненты сдвига из-за остаточного магнитного потока в датчике 2 тока имеют место ошибка в схеме и 1-ая и 2-ая гармонические составляющие выходной частоты, обусловленные этим сдвигом измеренного усиления.
[0066] [Вариант 3 выполнения настоящего изобретения]
На фиг. 5 показана блок-схема секции 4 управления синхронизации тока коммерческого источника питания согласно третьему варианту выполнения настоящего изобретения. В третьем варианте выполнения настоящего изобретения, как показано на фиг. 5, между переключателем S4 перехода и секцией 6 управления током установлена секция 9 процесса уменьшения. После наложения выходного напряжения инвертора INV и выходного напряжения коммерческого источника 1 питания переключатель S2 "включен/выключен", показанный в фиг. 1, разомкнут для работы инвертора. В этом случае, если ток на стороне коммерческого источника питания почти равен нулю, а ток на стороне инвертора почти равен току двигателя во время размыкания переключателя S2 "включен/выключен", то ток на стороне коммерческого источника питания мгновенно сильно вырастает вследствие переключения подачи электроэнергии от инвертора к коммерческому источнику питания, и операция переключения может стать неустойчивой. Поэтому секция 9 процесса уменьшения постепенно уменьшает ток на стороне инвертора во время размыкания переключателя S2 "включен/выключен".
[0067] На фиг. 6 секция 9 процесса уменьшения показана подробно. Вычитатель 21 вычитает предыдущее выходное значение описанного ниже вычитателя 25, которое представляет собой выходной сигнал из переключателя S4 перехода при предыдущем выборке. Переключатель 22 проверяет полярность командного тока Id* вдоль оси d или командного тока Iq* вдоль оси q в соответствии с флагом полярности командного тока, указывающим полярность командного тока Id* вдоль оси d или командного тока Iq* вдоль оси q, и поворачивает контакт переключателя 22 к положительной стороне или отрицательной стороне в соответствии с этой полярностью. Когда командный ток Id* вдоль оси d или командный ток Iq* вдоль оси q положителен, ограничитель 23а скорости уменьшения уменьшает командный ток Id* вдоль оси d или командный ток Iq* вдоль оси q со скоростью уменьшения от положительного значения до нуля. Когда командный ток Id* вдоль оси d или командный ток Iq* вдоль оси q отрицателен, ограничитель 23b скорости уменьшения уменьшает командный ток Id* вдоль оси d или командный ток Iq* вдоль оси q со скоростью уменьшения от отрицательного значения до нуля.
[0068] Переключатель 24 работает аналогично переключателю 22. Вычитатель 25 вычитает значение с выхода переключателя 24 из значения с выхода вычитателя 25. Буфер 26 выдает на выходе предыдущее значение из вычитателя 25, полученное на одну выборку раньше.
[0069] Вышеуказанный флаг полярности командного тока установлен в зависимости от полярности командного тока до сглаживания, как показано на фиг. 6. Когда командный ток до сглаживания - положителен, флаг полярности командного тока положителен, и соответственно переключатели 22 и 24 включены в положительную сторону. Когда командный ток до сглаживания отрицателен, флаг полярности командного тока отрицателен, и соответственно переключатели 22 и 24 включены в отрицательную сторону.
[0070] Секция 9 процесса уменьшения, сконструированная как показано на фиг. 6, имеется как для командного тока Id* вдоль оси d, так и командного тока Iq* вдоль оси q.
[0071] На фиг. 7 показаны временные графики, иллюстрирующие операции по управлению синхронизацией согласно третьему варианту выполнения настоящего изобретения. В этом примере уменьшение скорости не выполняют в период с момента переключения к управлению током до момента «начало уменьшения тока инвертора» (INV CURRENT DECREASE START), который является моментом истечения заранее заданного периода времени с момента переключения к управлению током, как показано на фиг. 7. Кроме того, переключатель S1 "включен/выключен" коммерческого источника 1 питания включают с момента переключения к управлению током до момента «начало уменьшения тока инвертора».
[0072] Устройство управления синхронизацией преобразователя мощности согласно третьему варианту выполнения настоящего изобретения способно обеспечить те же самые операции и эффекты, что и первый и второй варианты выполнения настоящего изобретения. Кроме того, поскольку ток на стороне инвертора во время размыкания переключателя S2 "включен/выключен" для инвертора INV почти равен нулю, можно предотвратить неустойчивую работу во время переключения с привода от инвертора INV к приводу от коммерческого источника 1 питания.
[0073] [Вариант 4 выполнения настоящего изобретения]
В третьем варианте выполнения настоящего изобретения командный ток Id* вдоль оси d и командный ток Iq* вдоль оси q уменьшали одновременно. В отличие от этого, в четвертом варианте выполнения настоящего изобретения командный ток Iq* вдоль оси q уменьшают до нуля, а затем командный ток Id* вдоль оси d уменьшают до нуля.
[0074] Ток Id вдоль оси d представляет собой ток, управляющий магнитным потоком. Без магнитного потока двигатель М не может создать вращающий момент и вращаться. Поэтому способ указанного уменьшения согласно четвертому варианту выполнения настоящего изобретения может сделать операцию по переключению более устойчивой.
[0075] На фиг. 8 подробно показана секция 9 процесса уменьшения согласно четвертому варианту выполнения настоящего изобретения. Секция 41 проверки нуля командного тока установлена со стороны выхода секции 9 процесса уменьшения на стороне оси q. Секция 41 проверки нуля командного тока предназначена для определения, уменьшился или нет до нуля командный ток Iq* вдоль оси q и выдачи флага нуля командного тока вдоль оси q. Кроме того, секция 41 проверки нуля командного тока принимает сигнал с выхода вычитателя 25 и выдает этот сигнал с выхода вычитателя 25 непосредственно в качестве командного тока вдоль оси q после сглаживания. Вышеуказанный флаг полярности командного тока устанавливают в зависимости от полярности командного тока вдоль оси q до сглаживания (фиг. 8), как в третьем варианте выполнения настоящего изобретения.
[0076] На стороне оси d со стороны входа имеются переключатели 42 и 43, а со стороны выхода - секция 9 процесса уменьшения соответственно. Каждый из переключателей 42 и 43 на сторонах входа и выхода выполнен так, чтобы включаться, когда со стороны секции 41 проверки нуля командного тока вдоль оси q подается флаг нуля командного тока вдоль оси q. Когда командный ток Iq* вдоль оси q становится равным нулю, то есть, Iq*=0, секция 41 проверки нуля командного тока, показанная в нижней части фиг. 8, устанавливает флаг нуля командного тока, и следовательно переключатели 42 и 43, показанные в верхней части фиг. 8, переходят в состояние вкл. (ON) (сторона, обращенная к секции 9 процесса уменьшения).
Кроме того, можно выполнить процесс уменьшения с использованием конструкции, которая сначала уменьшает ток вдоль оси d, а затем уменьшает ток вдоль оси q.
[0077] Как показано выше, четвертый вариант выполнения настоящего изобретения может обеспечить те же самые операции и эффекты, как и с первого по третий варианты выполнения настоящего изобретения. Кроме того, четвертый вариант выполнения настоящего изобретения может обеспечить более устойчивую работу по переключению с привода от инвертора INV к приводу от коммерческого источника 1 питания по сравнению с третьим вариантом выполнения настоящего изобретения.
[0078] [Вариант 5 выполнения настоящего изобретения]
На фиг. 9 показана блок-схема секции 4 управления на основе синхронного тока коммерческого источника питания согласно пятому варианту выполнения настоящего изобретения.
[0079] Фаза выходного напряжения инвертора INV управляется фазой выходного напряжения коммерческого источника 1 питания после переключения к управлению током. Однако во время управления V/f фаза выходного напряжения инвертора INV управляется фазой θ, определяемой вычислением частоты на выходе инвертора INV.
[0080] Поэтому возникает зазор или девиация между фазой выходного напряжения коммерческого источника 1 питания и фазой выходного напряжения инвертора INV во время периода от завершения синхронизации до начала управления током (период от "завершения синхронизации" (sync completion) до "переключения управления" (control changeover), показанный на фиг. 2 и фиг. 7). Вследствие этого зазора в фазе точность управления током может уменьшиться и вызвать перегрузку по току во время периода перекрытия, показанного на фиг. 2 и фиг. 7.
[0081] Поэтому секция 4 управления на основе синхронного тока коммерческого источника питания согласно пятому варианту выполнения настоящего изобретения дополнительно содержит секцию 10 вычисления выходной частоты для вычисления частоты на выходе инвертора INV, секцию 11 вычисления фазы для вычисления фазы θ выходного напряжения инвертора INV и секцию 12 ограничения скорости изменения для поддерживания зазора или девиации между фазой выходного напряжения θ1 коммерческого источника 1 питания и фазой θ выходного напряжения инвертора INV во время переключения и постепенного уменьшения этого зазора до нуля путем введения ограничения на скорость изменения.
[0082] На фиг. 10 более подробно показана секция 12 ограничения скорости изменения. Секция 12 ограничения скорости изменения содержит секцию 51 вычитания, переключатель 52, переключатели 53 и 56, ограничитель скорости уменьшения, секцию 55 вычисления абсолютного значения, буфер Z-1 и секцию 57 вычитания. Секция 51 вычитания вычисляет разность (θ-θ1) между фазой θ1 выходного напряжения коммерческого источника 1 питания и фазой θ выходного напряжения инвертора INV, вычисленной секцией 11 вычисления фазы на фиг. 9. Переключатель 52 выводит разность между фазой θ1 выходного напряжения коммерческого источника 1 питания и фазой θ выходного напряжения инвертора INV во время периода, когда флаг завершения синхронизации установлен в состояние выкл., и выводит предыдущее значение с выхода переключателя 56, полученное на одну выборку раньше во время периода, когда флаг завершения синхронизации установлен в состояние вкл. Каждый из переключателей 53 и 56 повернут к положительной стороне, когда флаг проверки полярности ошибки положителен, и к отрицательной стороне, когда флаг проверки полярности ошибки отрицателен. Ограничитель скорости уменьшения содержит ограничитель 54а скорости уменьшения с положительной стороны, предназначенный для уменьшения со стороны положительных значений до нуля, и ограничитель 54b скорости уменьшения с отрицательной стороны для уменьшения со стороны отрицательных значений до нуля. Секция 55 вычисления абсолютного значения вычисляет абсолютное значение на выходе ограничителя 54b скорости уменьшения с отрицательной стороны. Буфер Z-1 предназначен для вывода предыдущего значения с выхода переключателя 56, полученного на одну выборку раньше. Секция 57 вычитания вычитает выходное значения переключателя 56 из элемента θs информации о фазе коммерческого источника 1 питания.
[0083] С момента, когда флаг завершения синхронизации включен в момент «завершения синхронизации» (sync completion), разность между фазой θ1 выходного напряжения коммерческого источника 1 питания и фазой θ выходного напряжения с выхода секции 11 вычисления фазы уменьшается от значения непосредственно перед этим посредством ограничителя 54а, 54b скорости уменьшения. Оценивают полярность разности (θ-θ1) фаз, и флаг полярности ошибки фазы устанавливают положительным, если разность фаз положительна, и отрицательным, если разность фаз отрицательна. Ограничитель 54а скорости уменьшения уменьшает сдвиг фаз от положительного значения до нуля, если флаг полярности ошибки фазы установлен положительным, и ограничитель 54b скорости уменьшения уменьшает сдвиг фаз от отрицательного значения до нуля, если флаг полярности погрешности фазы установлен отрицательным. Секция 55 вычисления абсолютного значения вычисляет абсолютное значение сигнала на выходе ограничителя 54b скорости уменьшения. Когда сдвиг фаз уменьшается до нуля либо со стороны положительных значений, либо со стороны отрицательных значений, ограничитель 54а или в 54b скорости уменьшения выводит ноль. Результат, полученный вычитанием выходного сигнала для этого процесса (выход переключателя 56), как фаза θ1 из коммерческого источника 1 питания, выводится в качестве элемента θs информации о фазе, используемого в секции 7 преобразования трех фаз в две фазы и секции 8 преобразования двух фаз в три фазы, показанных на фиг. 9.
[0084] Таким образом, когда генерируется ошибка между фазой θ выходного напряжения инвертора INV и фазой θ1 выходного напряжения коммерческого источника 1 питания, система постепенно изменяет элемент θs информации о фазе коммерческого источника 1 питания, используемый в секции 7 преобразования трех фаз в две фазы и элементе 8 преобразования двух фаз в три фазы от фазы θ выходного напряжения инвертора INV к фазе θ1 выходного напряжения коммерческого источника 1 питания.
[0085] Уменьшение скорости не производят во время периода перед завершением синхронизации «sync completion», показанного на фиг. 2 и 7.
[0086] Как сказано выше, пятый вариант выполнения настоящего изобретения может обеспечить те же самые операции и эффекты, что и первый -четвертый варианты выполнения настоящего изобретения. Кроме того, секция 12 ограничения скорости изменения может предотвратить резкое изменение тока во время перекрытия друг с другом привода от инвертора INV и привода от коммерческого источника 1 питания. Соответственно, пятый вариант выполнения настоящего изобретения может предотвратить отказ и остановку и обеспечить устойчивую работу.
[0087] [Вариант 6 выполнения настоящего изобретения]
В первом варианте выполнения настоящего изобретения и пятом варианте выполнения настоящего изобретения при переходе от координатной системы фазы выходной частоты инвертора INV к системе координат фазы выходного напряжения коммерческого источника 1 питания учитывают только фазу. В шестом варианте выполнения настоящего изобретения в отличие от этого преобразование от одной системы координат к другой выполняют с учетом фазы и величины напряжения. На фиг. 11 показано соотношение между вектором напряжения трехфазного переменного тока, системой координат α-β и системой координат d-q.
[0088] Система координат α-β - это система координат после преобразования от трех фаз к двум фазам, она называется фиксированной системой координат. Система координат d-q - это система координат, которая вращается в системе координат α-β с некоторой скоростью. В общем случае эта система координат - система координат, которая вращается синхронно с частотой первичной обмотки двигателя М и называется вращательной системой координат.
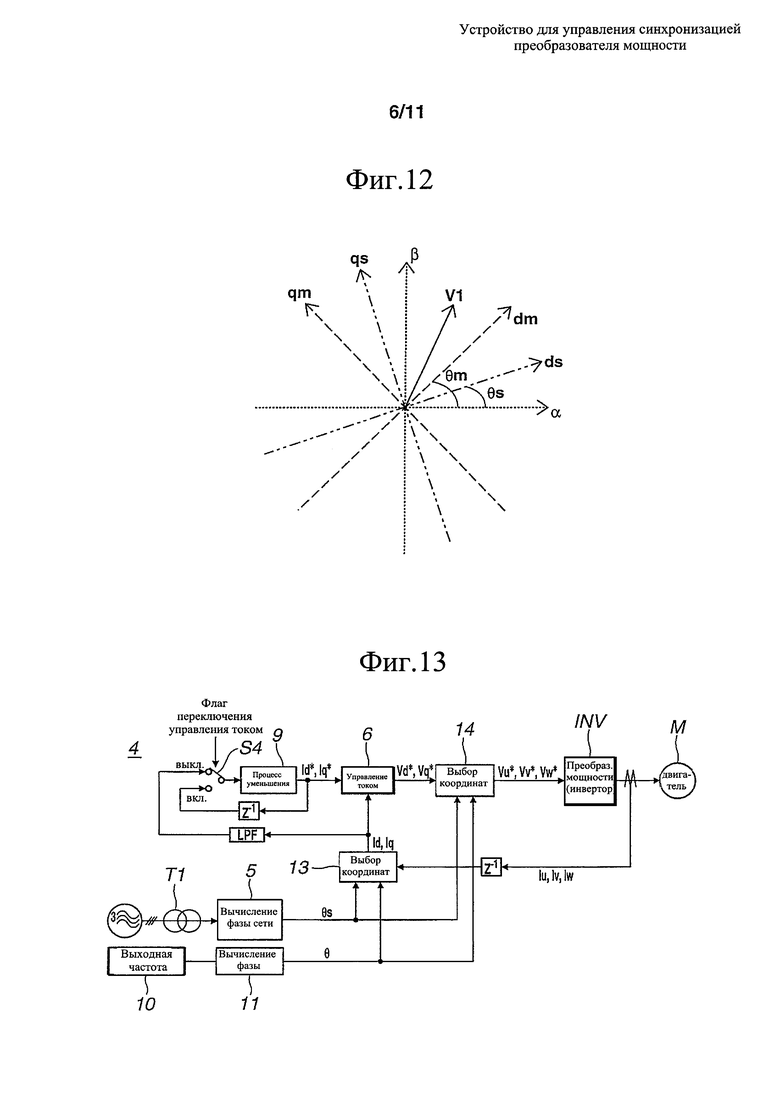
[0089] На фиг. 12 показана система координат dm-qm, которая определена как система координат, вращающаяся синхронно с частотой первичной обмотки двигателя М, и система координат ds-qs, которая определена как система координат, вращающаяся синхронно с фазой напряжения коммерческого источника 1 питания.
[0090] Фаза частоты первичной обмотки двигателя М обозначена как θm, а элемент информации о фазе, представляющий фазу коммерческого источника 1 питания, обозначен как θs. Вектор V1 напряжения определен, как показано на фиг. 12. В этом случае вектор V1 напряжения распределен между системой координат dm-qm и системой координат ds-qs. В этом случае напряжение вдоль оси d системы координат dm-qm обозначено как Vdm, а напряжение вдоль оси q обозначено как Vqm. Напряжение вдоль оси d в системе координат ds-qs обозначено как Vds, а напряжение вдоль оси q обозначено как Vqs.
[0091] В операции изменения фазы, используемой для преобразования координат от фазы частоты на выходе инвертора INV к фазе выходного напряжения коммерческого источника 1 питания (в момент «переключения управления» (control changeover) на фиг. 2 и фиг. 7), можно достигнуть изменения фазы выходного напряжения коммерческого источника 1 питания при сохранении величины вектора напряжения в первичной обмотке двигателя М (напряжения, поданного в двигатель М) путем изменения напряжение вдоль оси d от Vdm до Vds и изменения напряжения вдоль оси q от Vqm до Vqs.
[0092] Посредством этой операции система может сделать более стабильным напряжение, подаваемое в двигатель М, во время операции переключения.
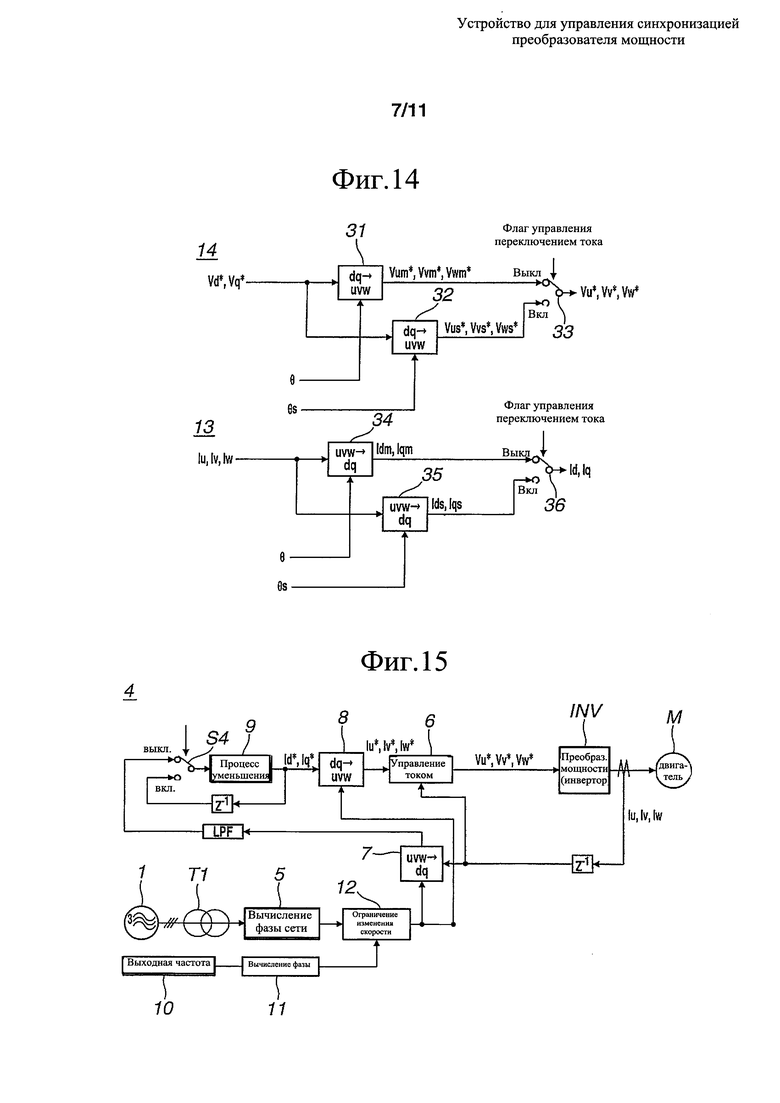
[0093] На фиг. 13 показана блок схема секции 4 управления на основе синхронного тока коммерческого источника питания согласно шестому варианту выполнения настоящего изобретения. В шестом варианте выполнения настоящего изобретения имеются секции 13 и 14 выбора осей координат вместо секции 7 преобразования трех фаз в две фазы и секции 8 преобразования двух фаз в три фазы. Описанные выше операции выполняются в секциях 13 и 14 выбора осей координат. На фиг. 14 подробно показана блок-схема секций 13 и 14 выбора осей координат. На фиг. 14 секция 14 выбора осей координат содержит секции 31 и 32 преобразования двух фаз в три фазы, а секция 13 выбора осей координат содержит секции 34 и 35 преобразования трех фаз в две фазы. Для соответствующих преобразований координат секция 32 преобразования двух фаз в три фазы и секция 35 преобразования трех фаз в две фазы используют элемент θs информации о фазе коммерческого источника 1 питания. Для соответствующих преобразований координат секция 31 преобразования двух фаз в три фазы и секция 34 преобразования трех фаз в две фазы используют фазу θ выходного напряжения инвертора INV. Флаг переключения управления током устанавливают в момент «переключение управления» (control changeover), показанный на фиг. 2 или фиг. 7.
[0094] До переключения к управлению током (управление ACR) переключатели 33 и 36 перехода на фиг. 14 установлены в положение вкл., и следовательно преобразования координат выполняются в секции 31 преобразования двух фаз в три фазы и секции 34 преобразования трех фаз в две фазы с использованием фазы θ выходного командного напряжения инвертора INV. После переключения к управлению током (управление ACR) переключатели 33 и 36 перехода на фиг. 14 установлены в положение вкл., и следовательно преобразования координат выполняют в секции 32 преобразования двухфазный-трехфазный и секции 35 преобразования трехфазный-двухфазный с использованием элемента θs информации о фазе коммерческого источника 1 питания.
[0095] Таким образом, шестой вариант выполнения настоящего изобретения может обеспечить те же самые операции и эффекты, что и первый-пятый варианты выполнения настоящего изобретения. Кроме того, можно поддерживать величину вектора напряжения в первичной обмотке двигателя М неизменной и выполнить изменение фазы выходного напряжения коммерческого источника 1 питания при постоянной величине этого вектора.
[0096] [Вариант 7 выполнения настоящего изобретения]
На фиг. 15 показана секция управления на основе синхронного тока коммерческого источника питания согласно седьмому варианту выполнения настоящего изобретения. Управление токами может быть выполнено в форме трехфазного тока без выполнения преобразования координат. В этом случае, как показано на фиг. 5, командный ток Id* вдоль оси d и командный ток Iq* вдоль оси q преобразуют в командные трехфазные токи Iu*, Iv* и Iw* с помощью секции 8 преобразования двух фаз в три фазы. Затем секция 6 управления током вычисляет командные трехфазные напряжения Vu*, Vv*, Vw* в соответствии с девиацией между командным трехфазным током Iu*, Iv*, Iw* и трехфазным измеренным током Iu, Iv, Iw.
[0097] Седьмой вариант выполнения настоящего изобретения может обеспечить те же самые операции и эффекты, что и с первого по шестой варианты выполнения настоящего изобретения. Кроме того можно опустить вычисление преобразования координат во время управления током и упростить конструкцию системы управления током.
[0098] [Вариант 8 выполнения настоящего изобретения]
Выходное напряжение инвертора INV уменьшается вследствие падения напряжения, обусловленного реактором L переменного тока, подключенным на выходе инвертора INV. Это падение напряжения на реакторе L переменного тока вызывает разность потенциалов и сдвиг фаз между выходным напряжением инвертора INV и напряжением коммерческого источника питания, и в конечном счете вызывает перекрестный ток. Восьмой вариант выполнения настоящего изобретения обеспечивает компенсацию этого падения напряжения, обусловленного реактором L переменного тока, чтобы предотвратить появление перекрестного тока.
[0099] На фиг. 17 показана векторная диаграмма выходного напряжения инвертора INV. Слева на фиг. 17 показано состояние нагрузки привода, а справа на фиг. 17 показано регенеративное состояние нагрузки. В качестве примера взят индукционный электродвигатель (двигатель).
[0100] На фиг. 17 используются следующие обозначения: I1: ток в первичной обмотке, Id: измеренный ток вдоль оси d, Iq: измеренный ток вдоль оси q, ω1: компонент угловой частоты инвертора INV (=2π × частота на выходе инвертора INV), L1: индуктивность реактора L переменного тока, Ls: реактивное сопротивление утечки в двигателе, R1: активное сопротивление двигателя, V1: выходное напряжение на контактах двигателя, Е2: индуцированное напряжение на двигателе, Vac1: падение напряжения на реакторе L переменного тока.
[0101] На фиг. 17, V1+Vac1 - выходное напряжение инвертора INV, a V1 - напряжение на клеммах двигателя. Как показано на фиг. 17, возникает разность между напряжением V1+Vac1 на выходе инвертора и напряжением V1 на клеммах двигателя. Коммерческий источник 1 питания связан с двигателем М через электромагнитный контактор. Соответственно, мер для согласования величины и фазы напряжения коммерческого источника 1 питания и выходного напряжения V1+Vac1 инвертора INV друг с другом недостаточно, чтобы уменьшить указанную разность напряжений и предотвратить перекрестный ток. Можно уменьшить перекрестный ток путем компенсации падения напряжения Vac1 реактора L переменного тока.
[0102] В состоянии нагрузки привода и состоянии регенеративной нагрузки на фиг. 17 падение напряжения Vac1 на реакторе L переменного тока разделяется на направленное вдоль оси d и вдоль оси q. В этом случае компонента напряжения вдоль оси d полного падения напряжения Vac1 на реакторе L переменного тока равна ω1×L1×(-Iq), а компонента напряжения вдоль оси q полного падения напряжения Vac1 на реакторе L переменного тока равна ω1×L1×Id. Компонента ω1×L1×(-Iq) падения напряжения вдоль оси d накладывается на командное напряжение Vd* вдоль оси d, которое представляет собой выход схемы управления током, а компонент ω1×L1×Id падения напряжения вдоль оси q накладывается на командное напряжение Vq* вдоль оси q.
[0103] На фиг. 18 показана блок схема секции 4 управления на основе синхронного тока коммерческого источника питания согласно восьмому варианту выполнения настоящего изобретения. Секция 4 управления на основе синхронного тока коммерческого источника питания согласно восьмому варианту выполнения настоящего изобретения в дополнение к компонентам секции 4 управления на основе синхронного тока коммерческого источника питания согласно седьмому варианту выполнения настоящего изобретения дополнительно содержит секцию 15 вычисления частоты и секцию 16 компенсации ошибки выходного напряжения.
[0104] Секция 16 компенсации ошибки выходного напряжения компенсирует падение напряжения на реакторе L переменного тока. Частотная составляющая, используемая в секции 16 компенсации ошибки выходного напряжения, получается дифференцированием элемента θs информации о фазе, выдаваемого секцией 12 ограничения скорости изменения. Кроме того, компонент угловой частоты ω1 получают умножением элемента θs информации о фазе на 2π в секции 15 вычисления частоты.
[0105] Секция 16 компенсации ошибки выходного напряжения имеется для каждой из осей: оси d и оси q. На фиг. 19 подробно показана секция 16 компенсации ошибки выходного напряжения для оси d, а на фиг. 20 подробно показана секция 16 компенсации ошибки выходного напряжения для оси q.
[0106] Как показано на фиг. 19, секция 16 компенсации ошибки выходного напряжения вдоль оси d содержит умножитель 61а, производящий умножение компонента угловой частоты ω1, индуктивности L1 реактора переменного тока и измеренного тока Iq вдоль оси q, и вычитатель 62а, производящий вычитание выхода ω1×L1×Iq умножителя 61а умножителя из командного напряжения Vd* вдоль оси d и вывод результата вычитания в качестве финального командного напряжения Vd1* вдоль оси d.
[0107] Как показано на фиг. 20, секция 16 компенсации ошибки выходного напряжения вдоль оси q содержит умножитель 61b, производящий умножение компонента угловой частоты ω1, индуктивности L1 реактора переменного тока и измеренного тока Id вдоль оси d, и сумматор 62b, производящий суммирование выхода ω1×L1×Id умножителя 61а и командного напряжения Vq* вдоль оси q и вывод результата вычитания в качестве финального командного напряжения Vq1* вдоль оси q.
[0108] Таким образом, компенсацию выходного напряжения выполняют в соответствии с компонентом вдоль оси d, равным ω1×L1×(-Iq) падения напряжения Vac1, и компонентом вдоль оси q, равным ω1×L1×Id падения напряжения Vac1.
[0109] В восьмом варианте выполнения настоящего изобретения система или устройство управления измеряет ток на выходе инвертора INV и выполняет управление током, чтобы поддерживать ток равным величине командного тока. Поэтому, точность управления высока, а следовательно система управления может эффективно предотвратить перекрестный ток во время операции по переключению по сравнению с устройством, описанным в документе 3, где раскрыто техническое решение для переключения синхронизации.
[0110] Поэтому переключение привода от инвертора INV к приводу от коммерческого источника 1 питания проходит гладко и устойчиво без отказов и остановки преобразователя мощности вследствие перегрузки по току и напряжению, в результате надежность системы привода двигателя повышается.
[0111] Кроме того, по сравнению с первым по седьмой вариантами выполнения настоящего изобретения система учитывает падение напряжения Vac на реакторе L переменного тока и следовательно дополнительно предотвращает перегрузку по току и повышает надежность системы привода двигателя.
[0112] [Вариант 9 выполнения настоящего изобретения]
В девятом варианте выполнения настоящего в секции 16 компенсации ошибки выходного напряжения имеется средство создания зоны нечувствительности. Когда ток вдоль оси q становится равным нулю в состоянии без нагрузки, полярность может полностью измениться из-за наложения шума на измеренный ток. В случае инверсии полярности коррекция может отклониться от компоненты, для которой требуется компенсация. Поэтому имеется зона нечувствительности, позволяющая воздержаться от компенсации компоненты, обусловленной током вдоль оси q при отсутствии нагрузки или при незначительной нагрузке (то есть, когда измеренный ток (токи) Iu, Iv, Iw ниже, чем заранее заданное значение).
[0113] На фиг. 21 показана секция 16 компенсации ошибки выходного напряжения со средством 63 создания зоны нечувствительности и без средства 63 создания зоны нечувствительности. Как показано на фиг. 21, средство 63 создания зоны нечувствительности принимает командный ток Iq вдоль оси q и подает выходной сигнал в умножитель 61а. Выход средства 63 создания зоны нечувствительности равен нулю, когда абсолютная величина Iq меньше или равна заранее заданной величине, и равна Iq, когда абсолютная величина Iq больше заранее заданной величины. В других отношениях девятый вариант выполнения настоящего изобретения идентичен по конструкции восьмому варианту выполнения настоящего изобретения.
[0114] Как сказано выше, девятый вариант выполнения настоящего изобретения может обеспечить те же самые операции и эффекты, что и восьмой вариант выполнения настоящего изобретения. Кроме того, даже если на измеренный ток (токи) Iu, Iv, Iw, накладывается шум, когда измеренный ток (токи) Iu, Iv, Iw ниже заранее заданной величины, можно предотвратить нежелательный сдвиг вследствие шумов, который придется компенсировать вследствие инверсии полярности.
[0115] [Вариант 10 выполнения настоящего изобретения]
В секции 16 компенсации ошибки выходного напряжения согласно восьмому варианту выполнения настоящего изобретения используются командные напряжения Vd* и Vq*, компонент ω1 угловой частоты и измеренные токи Id и Iq. Однако желательно компенсировать падение напряжения Vac1 на реакторе L переменного тока с использованием информации о командных токах Id* и Iq* вместо измеренных токов Id и Iq.
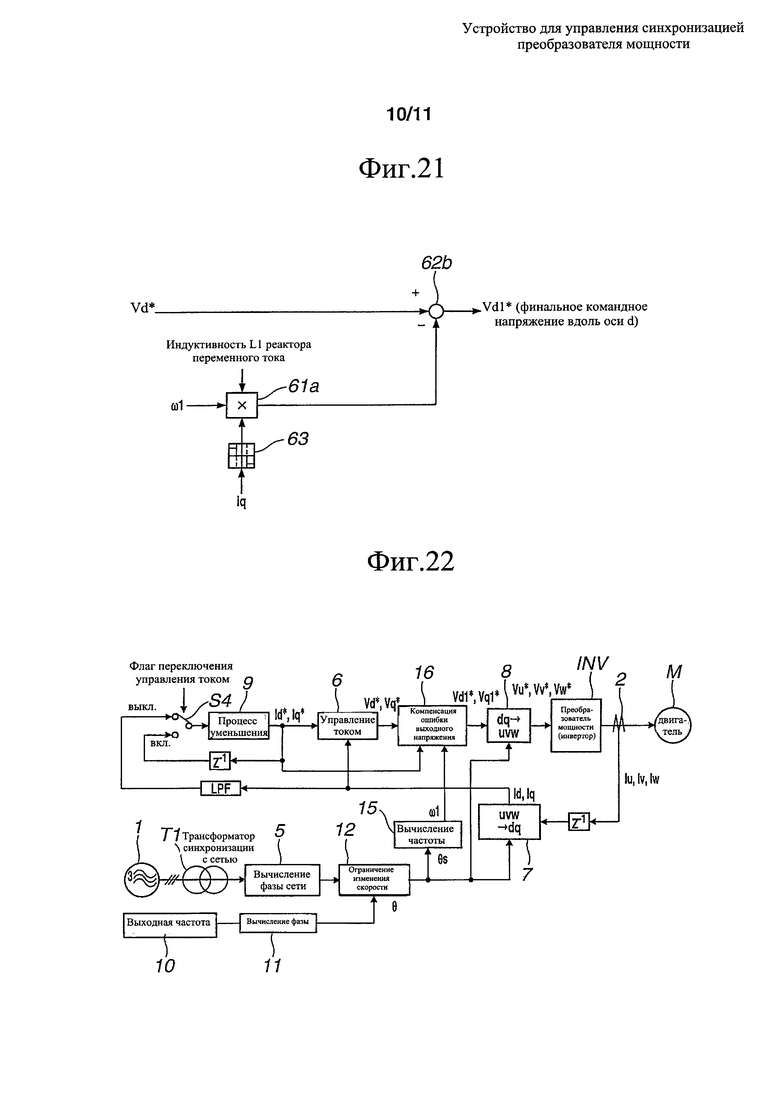
[0116] На фиг. 22 показана блок-схема секции 4 управления на основе синхронного тока коммерческого источника питания согласно десятому варианту выполнения настоящего изобретения. Можно считать, что путем управления током измеренные токи, Id и Iq сделаны равными командным токам Id* и Iq*. Кроме того, величины измеренных токов Id и Iq непосредственно перед переключением с управления V/f на управление током используются в качестве командных токов Id* и Iq*. Поэтому можно считать, что командные токи Id* и Iq* эквивалентны измеренным токам.
[0117] Как объяснено выше, десятый вариант выполнения настоящего изобретения может обеспечить те же самые операции и эффекты, что и восьмой и девятый варианты выполнения настоящего изобретения. Кроме того, при использовании командных токов Id* и Iq* можно избавиться от возмущений, которые могут входить в измеренные токи Id и Iq.
[0118] [Вариант 11 выполнения настоящего изобретения]
На фиг. 23 показана секция 16 компенсации ошибки выходного напряжения согласно одиннадцатому варианту выполнения настоящего изобретения. В одиннадцатом варианте выполнения настоящего изобретения компенсация падения напряжения на реакторе L переменного тока учитывается как постоянное значение.
[0119] Как показано на фиг. 23, секция 16 компенсации ошибки выходного напряжения согласно одиннадцатому варианту выполнения настоящего изобретения содержит умножитель 64, секцию 65 вычисление θcomp, умножители 66а, 66b, вычитатель 67а и сумматор 67b.
[0120] Умножитель 64 вычисляет значение Vcomp компенсации падения напряжения путем перемножения индуктивности L1 реактора L переменного тока, компоненты ω1 угловой частоты и тока I в условиях нагрузки привода во время синхронизации с коммерческим источником питания. Секция 65 вычисление θcomp вычисляет θcomp с использованием командного тока Id* вдоль оси d и командного тока Iq* вдоль оси q.
[0121] Умножитель 66а вычисляет компоненту Vd_comp компенсации падения напряжения вдоль оси d путем умножения значения Vcomp компенсации падения напряжения и sin(θcomp). Умножитель 66b вычисляет компоненту Vq_comp компенсации падения напряжения вдоль оси q путем умножения значения Vcomp падения напряжения на cos(θcomp).
[0122] Вычитатель 67а вычитает компоненту Vd_comp компенсации падения напряжения вдоль оси d из командного напряжения Vd* и выводит результат вычитания в качестве результирующей командного напряжения Vd1* вдоль оси d. Сумматор 67b прибавляет компонент Vq_comp компенсации падения напряжения вдоль оси q к командному напряжению Vq* вдоль оси q и выводит результат суммирования в качестве результирующего командного напряжения Vq1* вдоль оси q.
[0123] Можно вычислить величину компенсации падения напряжения с использовании выражения (9), как показано на фиг. 17 для восьмого варианта выполнения настоящего изобретения, если известны индуктивность L1 реактора L переменного тока и условия работы под нагрузкой во время синхронизации с коммерческим источником 1 питания (а именно, ток I=√(Id2+Iq2) и компонента ω1 угловой частоты. При использовании этого способа можно компенсировать падение напряжения Vac1 реактора L переменного тока, не используя датчик 2 тока и секцию 15 вычисления частоты, показанную на фиг. 18. Величина компенсации падения напряжения обозначена как Vcomp.
[0124]

[0125] Командный ток Id* вдоль оси d и командный ток Iq* вдоль оси q использованы для проекции на ось d и ось q. На фиг. 24 изображена векторная диаграмма, показывающая только командные токи Id* и Iq* вдоль оси d и вдоль оси q и падение напряжения Vac1 на реакторе L переменного тока. Нет никаких существенных различий в работе привода и регенерации. Соответственно, показана только работа при нагрузке привода.
[0126] Отношение для проекций на ось d и ось q определяется выражением (10):
[0127]

[0128] Преобразование к компонентам компенсации напряжения вдоль оси d и вдоль оси q может быть выполнено путем вычисления следующих математических выражений (11) и (12) с использованием θcomp, определенного выражением (10), как очевидно из фиг. 24. Как видно из выражений (11) и (12), компонента компенсации напряжения вдоль оси d равна Vd_comp, а компонента компенсации напряжения вдоль оси q равна Vq_comp.
[0129]

[0130]

[0131] Полученные таким образом компоненты компенсации накладываются соответственно на командное напряжение Vd* вдоль оси d и командное напряжение Vq* вдоль оси q, выдаваемые средствами управления током.
[0132] В одиннадцатом варианте выполнения настоящего изобретения компонента Vd_comp компенсации падения напряжения вдоль оси d и компонента Vq_comp компенсации падения напряжения вдоль оси q определены согласно вышеуказанным математическим выражениям (11) и (12), если считать компоненту ω1 угловой частоты, командный ток Id* вдоль оси d и командный ток Iq* вдоль оси q постоянными. Альтернативно, предпочтительно использовать способ определения компонентов компенсации, определяя один из этих параметров как постоянное значение и определяя другой параметр (параметры) из измеренной величины (величин), как показано на фиг. 18.
[0133] Как объяснено выше, одиннадцатый вариант выполнения настоящего изобретения может обеспечить те же самые операции и эффекты, что и восьмой-десятый варианты выполнения настоящего изобретения. Кроме того, можно скомпенсировать падение напряжения Vac1 на реакторе L переменного тока без потребности в датчике 2 тока и в секции 18 вычисления частоты.
[0134] [Вариант 12 выполнения настоящего изобретения]
В двенадцатом варианте выполнения настоящего изобретения компенсацию выходного напряжения выполняют во время управления V/f перед завершением синхронизации. Когда используется двенадцатый вариант выполнения настоящего изобретения, секция 6 управления током, секция 16 компенсации ошибки выходного напряжения и секция 8 преобразования двух фаз в три фазы, показанные на фиг. 18 и фиг. 22, соединены, как показано на фиг. 25.
[0135] Таким образом, как показано на фиг. 25, в двенадцатом варианте выполнения настоящего изобретения между секцией 16 компенсации ошибки выходного напряжения и секцией 8 преобразования двух фаз в три фазы установлен переключатель S5 перехода. Переключатель S5 перехода принимает командное напряжение Vd* вдоль оси d и командное напряжение Vq* вдоль оси q и финальные командные напряжения Vd1* и Vq1* вдоль оси d и вдоль оси q.
[0136] Переключатель S5 перехода связан со стороной Выкл. во время периода, в течение которого флаг переключения управления током установлен в нуль (то есть, во время управления V/f). В этом состоянии переключатель S5 перехода выдает финальное командное напряжение Vd1* вдоль оси d и финальное командное напряжение Vq1* вдоль оси q в секцию 8 преобразования двух фаз в три фазы. Во время периода, когда флаг переключения управления током установлен в единицу (то есть, во время управления ACR), переключатель S5 перехода связан со стороной Вкл. и выдает командное напряжение Vd* вдоль оси d и командное напряжение Vq* вдоль оси q в секцию преобразования двух фаз в три фазы.
[0137] Если компенсация ошибки выходного напряжения была выполнена перед завершением синхронизации, то после переключения к управлению током не требуется компенсации ошибки выходного напряжения.
[0138] Во время управления током (управление ACR) инвертер INV выводит напряжение, включая падение напряжения Vac1 на реакторе L. В этом случае элемент информации об измеренном токе содержит компонент падения напряжения Vac1 на реакторе L переменного тока, а следовательно не требуется компенсации ошибки напряжения.
[0139] Согласно двенадцатому варианту выполнения настоящего изобретения можно опустить сложные вычисления во время управления током, упростить конструкцию и снизить объем вычислений во время управления током.
[0140] Хотя выше изобретение было описано в отношении некоторых вариантов его выполнения, оно не ограничено вариантами его выполнения, описанными выше. В рамках технической концепции настоящего изобретения возможны модификации и вариации вариантов выполнения настоящего изобретения, описанных выше. Эти модификации и вариации находятся в объеме пунктов формулы изобретения.




Изобретение относится к области электротехники и может быть использовано для приведения в действие электродвигателя от коммерческого источника питания. Техническим результатом является повышение точности управления током и обеспечение стабильных рабочих характеристик при переключении питания привода от преобразователя мощности к питанию привода от коммерческого источника питания. В устройстве для управления синхронизацией преобразователя мощности секция (3) управления синхронизацией управляет работой преобразователя мощности (INV) в режиме управления V/f путем установки первого переключателя "включен/выключен" (S1) в разомкнутое состояние, а второго переключателя "включен/выключен" (S2) в замкнутое состояние. Секция (4) управления на основе синхронного тока коммерческого источника питания управляет работой преобразователя мощности (INV) в режиме управления V/f, устанавливая первый переключатель (S1) "включен/выключен" в разомкнутое состояние, а второй переключатель (S2) "включен/выключен" в замкнутое состояние, пока угловая скорость двигателя М не достигает заранее заданного значения, и изменяет управление преобразователем мощности на управление током, основанным на токе, измеренном датчиком (2) тока, после того, как угловая скорость двигателя М достигла заранее заданного значения. После этого электроэнергия подается в двигатель как из преобразователя мощности (INV), так и коммерческого источника (1) питания путем установки первого переключателя (S1) "включен/выключен" в замкнутое состояние, а после этого электроэнергия подается в двигатель М из коммерческого источника (1) питания путем установки второго переключателя (S2) "включен/выключен" в разомкнутое состояние. Таким образом, устройство управления преобразователем мощности осуществляет точное управление током и надежно меняет режим привода с привода от преобразователя мощности к приводу от коммерческого источника питания. 12 з.п. ф-лы, 25 ил.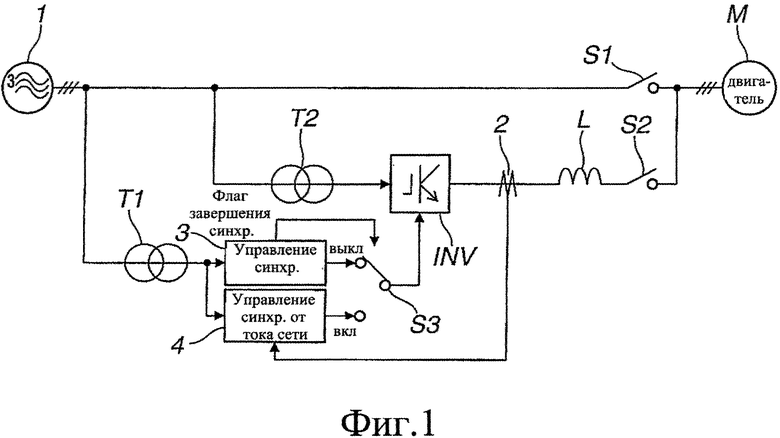
1. Устройство управления синхронизацией преобразователя мощности для подачи электричества из коммерческого источника питания в двигатель, содержащее:
первый переключатель "включен/выключен", установленный между коммерческим источником питания и двигателем;
последовательную цепь, которая включена параллельно первому переключателю "включен/выключен" и которая содержит преобразователь мощности, реактор переменного тока и второй переключатель "включен/выключен";
секцию управления синхронизацией, предназначенную для управления преобразователем мощности от момента пуска двигателя до тех пор, пока выходное напряжение коммерческого источника питания и выходное напряжение преобразователя мощности не будут синхронизированы друг с другом; и
секцию управления на основе синхронного тока коммерческого источника питания, предназначенную для управления преобразователем мощности после установления синхронизации между выходным напряжением коммерческого источника питания и выходным напряжением преобразователя мощности;
при этом устройство управления синхронизацией преобразователя мощности выполнено с возможностью переключения управления от первого управления преобразователем мощности, осуществляемого с помощью секции управления синхронизацией, ко второму управлению преобразователем мощности, осуществляемому с помощью секции управления на основе синхронного тока коммерческого источника питания;
при этом секция управления синхронизацией выполнена с возможностью управлять работой преобразователя мощности в режиме управления V/f путем установки первого переключателя "включен/выключен" в разомкнутое состояние, а второго переключателя "включен/выключен" в замкнутое состояние;
а секция управления на основе синхронного тока коммерческого источника питания выполнена с возможностью управлять работой преобразователя мощности в режиме управления V/f путем установки первого переключателя "включен/выключен" в разомкнутое состояние, а второго переключателя "включен/выключен" в замкнутое состояние сразу после переключения от первого управления, осуществляемого с помощью секции управления синхронизацией преобразователя мощности, чтобы затем изменить управление преобразователем мощности на управление током на основе измеренного тока на выходе преобразователя мощности, и затем подавать электроэнергию в двигатель как из преобразователя мощности, так и из коммерческого источника питания путем установки первого переключателя "включен/выключен" в замкнутое состояние, а затем обеспечить подачу электроэнергии из коммерческого источника питания в двигатель путем установки второго переключателя "включен/выключен" в разомкнутое состояние.
2. Устройство по п. 1, в котором секция управления на основе синхронного тока коммерческого источника питания содержит:
секцию преобразования трех фаз в две фазы, предназначенную для преобразования трехфазных измеренных токов, которые представляют собой измеренные значения трехфазных выходных токов преобразователя мощности, в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания;
переключатель перехода, предназначенный для вывода измеренного тока вдоль оси d и измеренного тока вдоль оси q в виде командного тока вдоль оси d и командного тока вдоль оси q во время режима управления V/f, и вывода предыдущего командного тока вдоль оси d, который представляет собой предыдущее значение командного тока вдоль оси d на одну выборку назад, и предыдущего командного тока вдоль оси q, который представляет собой предыдущее значение командного тока вдоль оси q на одну выборку назад, в качестве командного тока вдоль оси d и командного тока вдоль оси q во время управления током;
секцию управления током, выдающую командное напряжение вдоль оси d и командное напряжение вдоль оси q в соответствии с девиацией между током, измеренным вдоль оси d, и командным током вдоль оси d и девиацией между измеренным током вдоль оси q и командным током вдоль оси q; и
секцию преобразования двух фаз в три фазы, предназначенную для преобразования командного напряжения вдоль оси d и командного напряжения вдоль оси q в трехфазные командные напряжения в соответствии с элементом информации о фазе коммерческого источника питания.
3. Устройство по п. 1, в котором секция управления на основе синхронного тока коммерческого источника питания содержит:
секцию преобразования трех фаз в две фазы, предназначенную для преобразования трехфазных измеренных токов, которые представляют собой измеренные значения трехфазных выходных токов преобразователя мощности, в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания;
переключатель перехода, предназначенный для вывода измеренного тока вдоль оси d и измеренного тока вдоль оси q в виде командного тока вдоль оси d и командного тока вдоль оси q во время режима управления V/f, и вывода предыдущего командного тока вдоль оси d, который представляет собой предыдущее значение командного тока вдоль оси d на одну выборку назад, и предыдущего командного тока вдоль оси q, который представляет собой предыдущее значение командного тока вдоль оси q на одну выборку назад, в качестве командного тока вдоль оси d и командного тока вдоль оси q во время управления током;
секцию преобразования двух фаз в три фазы, предназначенную для преобразования командного напряжения вдоль оси d и командного напряжения вдоль оси q в трехфазные командные напряжения в соответствии с элементом информации о фазе коммерческого источника питания; и
секцию управления током, предназначенную для вывода командного трехфазного напряжения в соответствии с девиацией между измеренными трехфазными токами и командными трехфазными токами.
4. Устройство по п. 1, в котором секция управления на основе синхронного тока коммерческого источника питания содержит:
секцию преобразования трех фаз в две фазы, предназначенную для преобразования трехфазных измеренных токов, которые представляют собой измеренные значения трехфазных выходных токов преобразователя мощности, в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания;
переключатель перехода, предназначенный для вывода измеренного тока вдоль оси d и измеренного тока вдоль оси q в виде командного тока вдоль оси d и командного тока вдоль оси q во время режима управления V/f, и вывода предыдущего командного тока вдоль оси d, который представляет собой предыдущее значение командного тока вдоль оси d на одну выборку назад, и предыдущего командного тока вдоль оси q, который представляет собой предыдущее значение командного тока вдоль оси q на одну выборку назад, в качестве командного тока вдоль оси d и командного тока вдоль оси q во время управления током;
секцию управления током, выдающую командное напряжение вдоль оси d и командное напряжение вдоль оси q в соответствии с девиацией между током, измеренным вдоль оси d, и командным током вдоль оси d и девиацией между измеренным током вдоль оси q и командным током вдоль оси q;
секцию компенсации ошибки выходного напряжения, предназначенную для вывода разности, полученной путем вычитания произведения, полученного умножением индуктивности реактора переменного тока, компоненты угловой частоты и измеренного тока вдоль оси q, из командного напряжения вдоль оси d в качестве финального командного напряжения вдоль оси d, и для вывода суммы, полученной сложением произведения индуктивности реактора переменного тока, компоненты угловой частоты и измеренного тока вдоль оси d с командным напряжением вдоль оси q в качестве финального командного напряжения вдоль оси q, и
секцию преобразования двух фаз в три фазы, предназначенную для преобразования финального командного напряжения вдоль оси d и финального командного напряжения вдоль оси q в трехфазные командные напряжения в соответствии с элементом информации о фазе коммерческого источника питания.
5. Устройство по п. 1, в котором секция управления на основе синхронного тока коммерческого источника питания содержит:
секцию преобразования трех фаз в две фазы, предназначенную для преобразования трехфазных измеренных токов, которые представляют собой измеренные значения трехфазных выходных токов преобразователя мощности, в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания;
переключатель перехода, предназначенный для вывода измеренного тока вдоль оси d и измеренного тока вдоль оси q в виде командного тока вдоль оси d и командного тока вдоль оси q во время режима управления V/f, и вывода предыдущего командного тока вдоль оси d, который представляет собой предыдущее значение командного тока вдоль оси d на одну выборку назад, и предыдущего командного тока вдоль оси q, который представляет собой предыдущее значение командного тока вдоль оси q на одну выборку назад, в качестве командного тока вдоль оси d и командного тока вдоль оси q во время управления током;
секцию управления током, выдающую командное напряжение вдоль оси d и командное напряжение вдоль оси q в соответствии с девиацией между током, измеренным вдоль оси d, и командным током вдоль оси d и девиацией между измеренным током вдоль оси q и командным током вдоль оси q; секцию компенсации ошибки выходного напряжения, предназначенную для вывода разности, полученной путем вычитания произведения, полученного умножением индуктивности реактора переменного тока, компоненты угловой частоты и командного тока вдоль оси q из командного напряжения вдоль оси d, в качестве финального командного напряжения вдоль оси d, и для вывода суммы, полученной сложением произведения индуктивности реактора переменного тока, компоненты угловой частоты и командного тока вдоль оси d с командным напряжением вдоль оси q, как финального командного напряжения вдоль оси q, и
секцию преобразования двух фаз в три фазы, предназначенную для преобразования финального командного напряжения вдоль оси d и финального командного напряжения вдоль оси q в трехфазные командные напряжения в соответствии с элементом информации о фазе коммерческого источника питания.
6. Устройство по п. 1, в котором секция управления на основе синхронного тока коммерческого источника питания содержит:
секцию преобразования трех фаз в две фазы, предназначенную для преобразования трехфазных измеренных токов, которые представляют собой измеренные значения трехфазных выходных токов преобразователя мощности, в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания;
переключатель перехода, предназначенный для вывода измеренного тока вдоль оси d и измеренного тока вдоль оси q в виде командного тока вдоль оси d и командного тока вдоль оси q во время режима управления V/f, и вывода предыдущего командного тока вдоль оси d, который представляет собой предыдущее значение командного тока вдоль оси d на одну выборку назад, и предыдущего командного тока вдоль оси q, который представляет собой предыдущее значение командного тока вдоль оси q на одну выборку назад, в качестве командного тока вдоль оси d и командного тока вдоль оси q во время управления током;
секцию управления током, выдающую командное напряжение вдоль оси d и командное напряжение вдоль оси q в соответствии с девиацией между током, измеренным вдоль оси d, и командным током вдоль оси d и девиацией между измеренным током вдоль оси q и командным током вдоль оси q;
секцию компенсации ошибки выходного напряжения, предназначенную для вычисления значения компенсации падения напряжения путем умножения индуктивности реактора переменного тока, компоненты угловой частоты и тока в нагрузке привода во время синхронизации на основе коммерческого источника, с вычислением θcomp=tan-1 (командный ток вдоль оси d/командный ток вдоль оси q) в соответствии с командным током вдоль оси d и командным током вдоль оси q, для вычисления компоненты компенсации падения напряжения вдоль оси d путем умножения значения компенсации падения напряжения и sin(θcomp), для вычисления компоненты компенсации падения напряжения вдоль оси q путем умножения значения компенсации падения напряжения и cos(θcomp), с выводом разности, полученной вычитанием компоненты компенсации падения напряжения вдоль оси d из командного напряжения вдоль оси d, как финального командного напряжения вдоль оси d, и вывода суммы, полученной сложением компоненты компенсации падения напряжения вдоль оси q и командного напряжения вдоль оси q, как финального командного напряжения вдоль оси q; и
секцию преобразования двух фаз в три фазы, предназначенную для преобразования финального командного напряжения вдоль оси d и финального командного напряжения вдоль оси q в трехфазные командные напряжения в соответствии с элементом информации о фазе коммерческого источника питания,
при этом по меньшей мере одно из тока в нагрузке привода во время синхронизации на основе коммерческого источника питания и угловой частотной составляющей является постоянным значением.
7. Устройство по одному из пп. 4-6, в котором секция компенсации погрешности выходного напряжения выполнена с возможностью устанавливать ток вдоль оси q равным нулю, если абсолютная величина тока вдоль оси q меньше или равна заранее заданному значению, при этом ток вдоль оси q представляет собой или измеренный ток вдоль оси q, или командный ток вдоль оси q.
8. Устройство по одному из пп. 4-7, которое дополнительно содержит переключатель перехода, предназначенный для приема командного напряжения вдоль оси d, командного напряжения вдоль оси q, финального командного напряжения вдоль оси d, и финального командного напряжения вдоль оси q и для вывода финального командного напряжения вдоль оси d и финального командного напряжения вдоль оси q в секцию преобразования двух фаз в три фазы во время режима управления V/f, и командного напряжения вдоль оси d и командного напряжения вдоль оси q в секцию преобразования двух фаз в три фазы во время управления током.
9. Устройство по одному из пп. 2-6, в котором секция управления на основе синхронного тока коммерческого источника питания содержит фильтр нижних частот, предназначенный для удаления высокочастотной компоненты измеренного тока вдоль оси d и измеренного тока вдоль оси q и для подачи измеренного тока вдоль оси d и измеренного тока вдоль оси q в переключатель перехода.
10. Устройство по одному из пп. 2-7, в котором секция управления на основе синхронного тока коммерческого источника питания выполнена с возможностью уменьшать командный ток вдоль оси d и командный ток вдоль оси q после заранее заданного временного периода от переключения до управления током.
11. Устройство по п. 10, в котором секция управления на основе синхронного тока коммерческого источника питания выполнена с возможностью уменьшать командный ток вдоль оси q до нуля, а после этого уменьшать командный ток вдоль оси d до нуля.
12. Устройство по одному из пп. 2-9, в котором секция управления на основе синхронного тока коммерческого источника питания выполнена с возможностью плавно изменять элемент информации о фазе коммерческого источника питания от фазы выходного напряжения преобразователя мощности к фазе выходного напряжения коммерческого источника питания, когда имеется ошибка или разность между фазой выходного напряжения преобразователя мощности и фазой выходного напряжения коммерческого источника питания.
13. Устройство по одному из пп. 2-12, в котором секция преобразования двух фаз в три фазы выполнена с возможностью преобразовывать командное напряжение вдоль оси d и командное напряжение вдоль оси q в трехфазное командное напряжение в соответствии с фазой выходного напряжения преобразователя мощности во время режима управления V/f, и
преобразовывать командное напряжение вдоль оси d и командное напряжение вдоль оси q в трехфазное командное напряжение в соответствии с элементом информации о фазе коммерческого источника питания во время управления током,
а секция преобразования трех фаз в две фазы выполнена с возможностью преобразовывать трехфазные измеренные токи в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с фазой выходного напряжения преобразователя мощности во время режима управления V/f и преобразовывать трехфазные измеренные токи в измеренный ток вдоль оси d и измеренный ток вдоль оси q в соответствии с элементом информации о фазе коммерческого источника питания во время управления током.
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| RU 2132110 С1, 20.06.1999 | |||
| DE 3133311 A1, 10.03.1983 | |||
| JP 2006149136 A, 08.06.2006 | |||
| Хлопкоочистительная машина | 1950 |
|
SU89682A1 |
| JP 3678781 B2, 02.08.2005 | |||
| US 5387855 A, 07.02.1995 | |||
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ И СПОСОБ ЕГО ПРИМЕНЕНИЯ ДЛЯ ПОЛУЧЕНИЯ ОДНОРОДНЫХ СМЕСЕЙ | 2002 |
|
RU2214303C1 |
| ПОРТАТИВНЫЙ СВЕТИЛЬНИК, СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ СВЕТА, ИСПУСКАЕМОГО ПОРТАТИВНЫМ СВЕТИЛЬНИКОМ, И УСТРОЙСТВО СВЯЗИ | 2013 |
|
RU2667503C2 |

