Изобретение относится к атомной энергетике и может быть использовано для проведения подъёмно-транспортных работ в реакторном зале атомной станции.
Известно устройство для перегрузки чехлов с отработавшим ядерным топливом, содержащее захватное устройство, подвешенное на двух независимых канатах на сдвоенных блоках внутри защитной камеры, блоки подъемной лебедки, тросовые барабаны, установленные стационарно на перекрытии (RU 2455715, G21C19/32, 2012). Отличительной особенностью известного устройства является то, что в сквозном отверстии перекрытия установлен защитный корпус, на верхнем торце защитного корпуса выполнена выемка, в которую установлена защитная плита с возможностью регулирования ее положения. Зазоры между защитным корпусом и защитной плитой заполнены биологической защитой, блоки подъемной лебедки установлены на защитной плите и состоят из трех групп парных блоков. К недостаткам известного устройства можно отнести следующие. Во-первых, доступ к захватному устройству затруднен наличием защитной камеры, во-вторых, устройство предназначено только для перегрузки чехлов с ОЯТ и, в-третьих, отсутствует возможность одновременного выполнения нескольких подъёмно-транспортных операций.
Известен аппарат для монтажных работ и эксплуатации ядерного реактора, состоящий из двух подъемных механизмов (каждый с барабанной лебедкой и прикрепленным зубчатым механизмом). Каждый из упомянутых механизмов имеет независимые подъемные тросы, соединяющиеся в единый блок и соответствующий барабан. Каждый из этих механизмов также имеет средства крепления к другому тросу подъемного механизма для распределения нагрузки между упомянутыми подъемными механизмами, механизм переключения скоростей, подвижный механизм для выборочного регулирования разницы подъемной скорости двух подъемных механизмов, соединение для передачи момента (привод) минимум для одного механизма, что обеспечит разные расстояния между упомянутым механизмом и механизмом переключения скоростей, мотор (привод), общий для обоих подъемных механизмов, перемещающаяся в горизонтальной плоскости жесткая связка (сцепка) между двумя подъемными механизмами, которая обеспечивает разные расстояния между упомянутыми механизмами, и вышеупомянутым блоком для тросов с «компенсирующим «устройством» выборочно применяющимся в случае необходимости (US 3984084, G21C 19/00, 1976). Известное устройство характеризуется недостаточной надежностью и невысокой производительностью, что связано с оснащением обоих подъемных механизмов общим мотором-приводом и наличием только двух подъемных скоростей.
Наиболее близким к заявляемому устройству является устройство для проведения подъёмно-транспортных работ в реакторном зале атомной станции, включающее мостовой кран, установленный на крановые пути (Н.А. Доллежаль, И.Я. Емельянов. Канальный ядерный энергетический реактор. М.: Атомиздат, с. 182). Устройство позволяет осуществлять практически любые подъёмно-транспортные работы в реакторном зале. Однако производительность устройства является недостаточной, особенно когда необходимо выполнять несколько подъёмно-транспортных операций параллельно.
Техническая проблема заключается в создании устройства для проведения подъемно-транспортных работ в реакторном зале атомной станции, лишённого указанного недостатка. Технический результат заключается в повышении производительности работ.
Для решения технической проблемы, а также для достижения заявленного технического результата предлагается устройство для проведения подъёмно-транспортных работ в реакторном зале атомной станции, включающее мостовой кран, установленный на крановые пути. Отличительной особенностью предлагаемого устройства является то, что оно дополнительно содержит тросовый манипулятор, оборудованный блоком управления, узлом подвеса с крановыми весами, по меньшей мере, двумя тросовыми лебёдками, размещенными ниже крановых путей, а блок управления связан с крановыми весами и лебёдками.
Тросовые лебедки могут быть закреплены на пролётной балке мостового крана, при этом тросы каждой из лебедок соединены с узлом подвеса.
Тросовые лебёдки могут быть закреплены на неподвижных станинах, находящихся в реакторном зале, при этом тросы, по меньшей мере, двух лебедок проходят до узла подвеса через блоки, размещенные на подвижных каретках. Причём опорные катки кареток контактируют с рельсовой дорогой, размещенной непосредственно под крановыми путями, а корпусы кареток соединены с дополнительными лебёдками при помощи тросов, предназначенных для перемещения кареток по рельсовой дороге.
Блок управления может быть выполнен с возможностью управлять работой каждой из лебедок как в автономном, так и автоматическом режиме для обеспечения возможности перемещения груза в заданном направлении.
Тросовые лебёдки могут быть выполнены с регулируемой скоростью вращения грузового барабана.
Оснащение устройства проведения подъёмно-транспортных работ тросовым манипулятором, оборудованным блоком управления, узлом подвеса с крановыми весами, по меньшей мере, двумя тросовыми лебёдками, размещенными ниже крановых путей, позволяет увеличить объём подъёмно-транспортных работ, выполняемых в единицу времени.
Закрепление тросовых лебедок на пролётной балке мостового крана с одновременным соединением троса каждой из лебедок с узлом подвеса позволяет осуществлять перемещение тросового манипулятора при помощи мостового крана.
Закрепление лебёдок на неподвижных станинах, находящихся в реакторном зале, так, что тросы, по меньшей мере, двух лебедок проходят до узла подвеса через блоки, размещенные на подвижных каретках, опорные катки которых контактируют с рельсовой дорогой, размещенной непосредственно под крановыми путями, с одновременным соединением корпусов кареток с дополнительными лебёдками при помощи тросов, предназначенных для перемещения кареток по рельсовой дороге, позволяет обеспечить полную автономность тросового манипулятора от мостового крана и тем самым производить параллельные подъёмно-транспортные работы.
Выполнение блока управления с возможностью управлять работой каждой из лебедок как в автономном, так и автоматическом режиме для обеспечения возможности перемещения груза в заданном направлении позволяет повысить надежность и производительность работы тросового манипулятора.
Выполнение лебёдок с регулируемой скоростью вращения грузового барабана позволяет регулировать скорость выполнения подъёмно-транспортных работ.
Таким образом достигается технический результат.
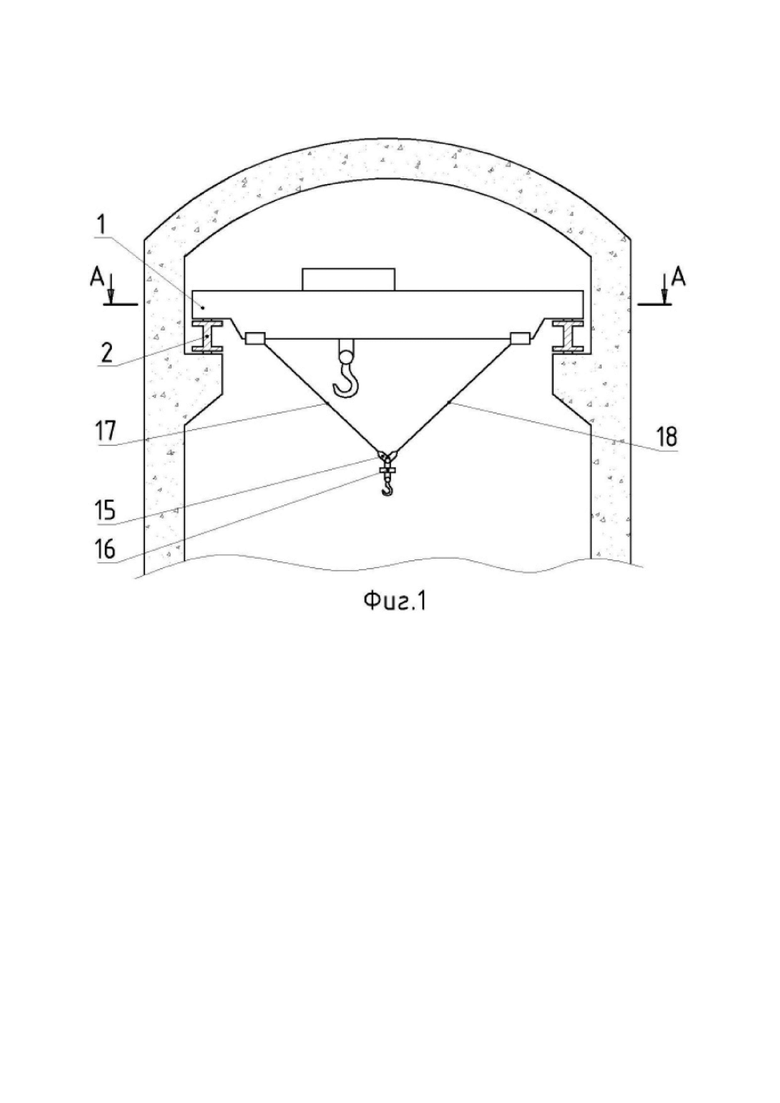
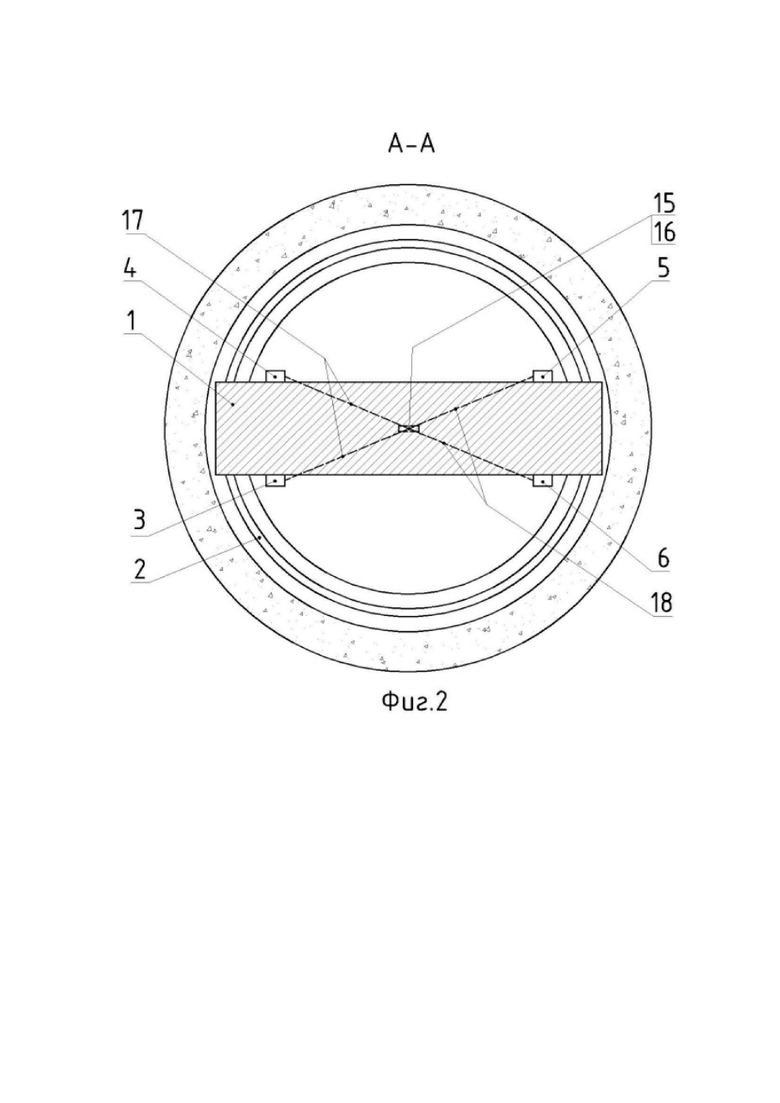
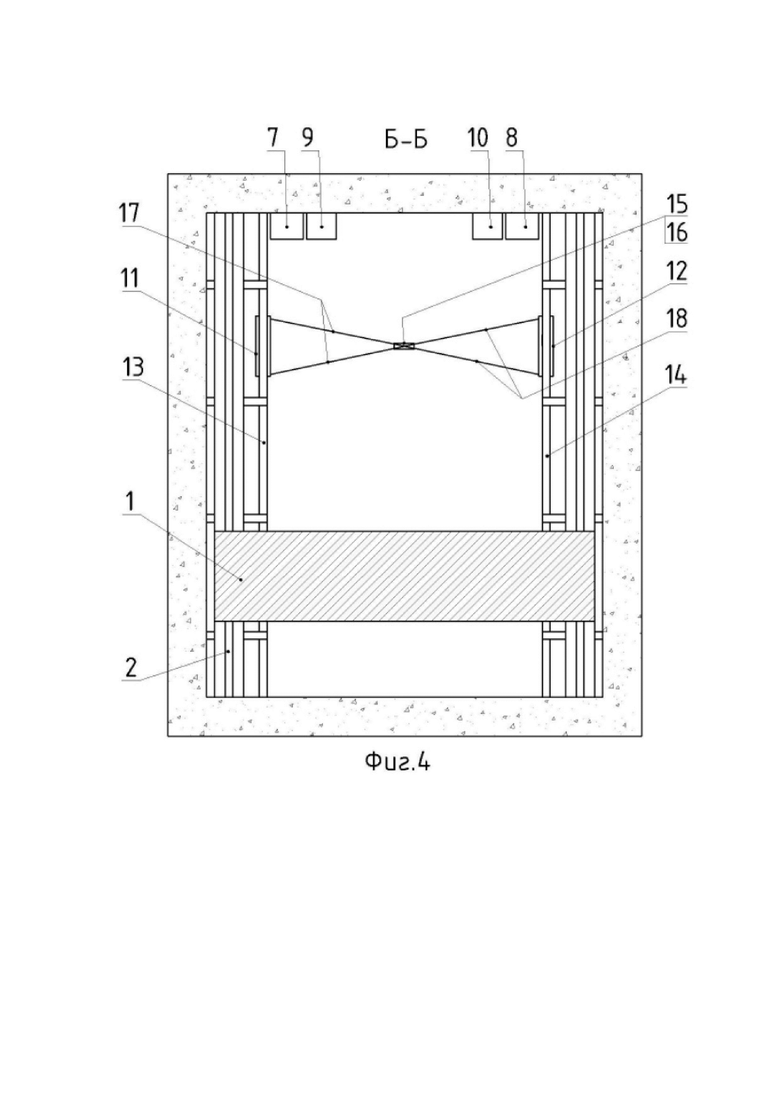
На фиг. 1 и фиг. 2 представлены соответственно продольный разрез и поперечное сечение заявляемого устройства в варианте, когда тросовые лебедки закреплены на пролётной балке мостового крана, на фиг. 3 и фиг. 4 представлены соответственно продольный разрез и поперечное сечение заявляемого устройства в варианте, когда лебёдки закреплены на неподвижных станинах, находящихся в реакторном зале, так, что тросы, по меньшей мере, двух лебедок проходят до узла подвеса через блоки, размещенные на подвижных каретках, опорные катки кареток контактируют с рельсовой дорогой, размещенной непосредственно под крановыми путями, а корпусы кареток соединены с дополнительными лебёдками при помощи тросов, предназначенных для перемещения кареток по рельсовой дороге, где 1 - мостовой кран, 2 - крановые пути, 3, 4, 5 и 6 - тросовые лебёдки, установленные на пролётной балке мостового крана, 7, 8, 9 и 10 — тросовые лебёдки, закреплённые на неподвижных станинах, 11 и 12 — подвижные каретки, 13, 14 — участки рельсовой дороги, 15 — узел подвеса, 16 — весы, 17, 18 - тросы.
Устройство работает следующим образом. В случае когда тросовые лебёдки 3, 4, 5 и 6 установлены на пролётной балке мостового крана (фиг.1), они перемещаются по залу вместе с мостовым краном. В случае когда тросовые лебёдки 7, 8, 9 и 10 закреплены на неподвижных станинах (фиг.2), узел подвеса подводят по одной координате к месту подъёмно-транспортных работ при помощи передвижения подвижных кареток 11 и 12 по участкам рельсовой дороги 13 и 14 при помощи лебёдок 7 и 8, соединённых с корпусами кареток тросами 18, а по другой координате - при помощи лебедок 9 и 10, осуществляющих перемещение тросов 17. Расположение лебедок 7, 8, 9 и 10 зависит от конкретных условий зала. Блок управления соединен с лебедками, крановыми весами и пультом управления (не показан). В блоке управления заложен программно-аппаратный комплекс, который анализирует показания датчиков лебедок, команды от пульта управления, показания весов, расположенных на узле подвеса, и в зависимости от этих параметров выдает команды двигателям лебедок. При совместной работе тросового манипулятора, оснащенного неподвижными лебёдками с мостовым краном 1, в случае пересечения путей перемещения грузов вдоль реакторного зала достаточно опустить крюк тросового манипулятора с грузом ниже груза, подвешенного на крюке мостового крана. Если тросовый манипулятор, оснащённый неподвижными лебёдками, не используется (например при перегрузках или при работе блока на мощности), достаточно снять крановые весы 16 и расцепить узел повеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом | 2023 |
|
RU2835999C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ДЛИННОМЕРНЫХ ГРОМОЗДКИХ ГРУЗОВ | 2009 |
|
RU2470802C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ДЛИННОМЕРНЫХ КРУПНОГАБАРИТНЫХ ГРУЗОВ | 2008 |
|
RU2451634C2 |
| Устройство комплекса дирижабля-крана | 2022 |
|
RU2798252C1 |
| Манипулятор для проведения ремонтных работ в коллекторе парогенератора ядерного реактора типа ВВЭР | 2017 |
|
RU2662655C1 |
| Кран-манипулятор с тросовыми приводами | 2022 |
|
RU2791750C1 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ МОНТАЖА И ДЕМОНТАЖА ПРОВОДОВ КОНТАКТНОЙ ПОДВЕСКИ ПОД ЗАДАННЫМ НАТЯЖЕНИЕМ И СПОСОБЫ МОНТАЖА ПРОВОДОВ КОНТАКТНОЙ ПОДВЕСКИ ПРИ ПОМОЩИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2097218C1 |
| Кран для установки пролетных строений мостов | 1952 |
|
SU95728A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ОПУСКАНИЯ ШАНДОРОВ В ОТВЕРСТИЯ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 1934 |
|
SU46192A1 |

Изобретение относится к атомной энергетике и может быть использовано для проведения подъёмно-транспортных работ в реакторном зале атомной станции. Устройство для проведения подъёмно-транспортных работ в реакторном зале атомной станции включает мостовой кран, установленный на крановые пути. Устройство дополнительно содержит тросовый манипулятор, оборудованный блоком управления, узлом подвеса с крановыми весами, по меньшей мере, двумя тросовыми лебёдками, размещенными ниже крановых путей. Блок управления связан с крановыми весами и лебёдками. Изобретение позволяет повысить производительность подъемно-транспортных работ. 4 з.п. ф-лы, 4 ил.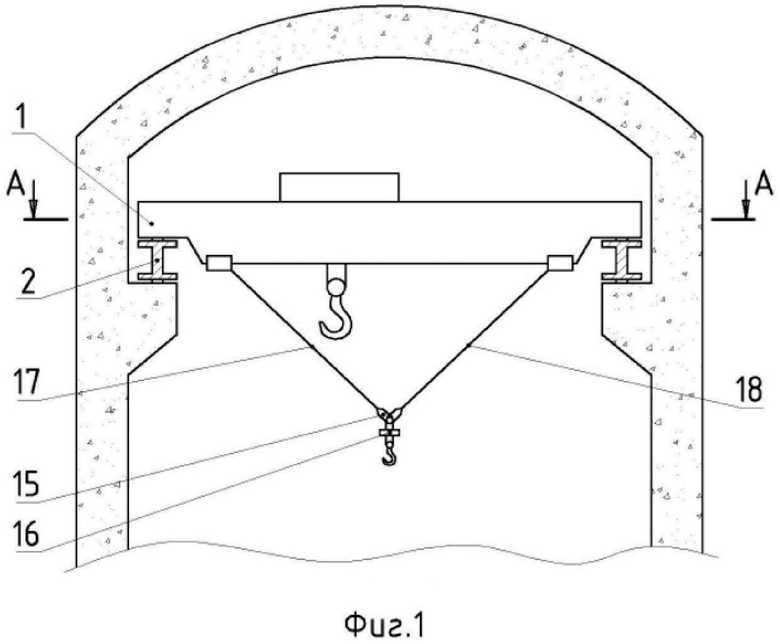
1. Устройство для проведения подъёмно-транспортных работ в реакторном зале атомной станции, включающее мостовой кран, установленный на крановые пути, отличающееся тем, что устройство дополнительно содержит тросовый манипулятор, оборудованный блоком управления, узлом подвеса с крановыми весами, по меньшей мере, двумя тросовыми лебёдками, размещенными ниже крановых путей, а блок управления связан с крановыми весами и лебёдками.
2. Устройство по п. 1, отличающееся тем, что тросовые лебедки закреплены на пролётной балке мостового крана, при этом тросы каждой из лебедок соединены с узлом подвеса.
3.. Устройство по п. 1, отличающееся тем, что тросовые лебёдки закреплены на неподвижных станинах, находящихся в реакторном зале, при этом тросы, по меньшей мере, двух лебедок проходят до узла подвеса через блоки, размещенные на подвижных каретках, причём опорные катки кареток контактируют с рельсовой дорогой, размещенной непосредственно под крановыми путями, а корпусы кареток соединены с дополнительными лебёдками при помощи тросов, предназначенных для перемещения кареток по рельсовой дороге.
4. Устройство по п. 2 или 3, отличающееся тем, что блок управления выполнен с возможностью управлять работой каждой из лебедок как в автономном, так и автоматическом режиме для обеспечения возможности перемещения груза в заданном направлении.
5. Устройство по п. 1, отличающееся тем, что лебёдки выполнены с регулируемой скоростью вращения грузового барабана.
| ДОЛЛЕЖАЛЬ Н.А | |||
| и др | |||
| Канальный ядерный энергетический реактор | |||
| Москва, Атомиздат, 1980, с.182 | |||
| RU 2066488 C1, 10.09.1996 | |||
| ОПУСКАЕМЫЙ ПОД ПЕРЕКРЫТИЕ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2000 |
|
RU2247693C2 |
| US 3773616 A1, 20.11.1973 | |||
| US 5043132 A, 27.08.1991. | |||

