Область техники, к которой относится изобретение
Устройство относится к измерительной технике и предназначено для измерения положения точки нулевого момента (ТНМ) человека при ходьбе без сгибания стопы.
Критерий ТНМ является одним из базовых критериев, применяемых для сохранения баланса наземных антропоморфных роботов во время ходьбы. В то же время для создания моделей энергоэффективных походок антропоморфного шагающего бипедального робота необходимы знания о траектории перемещения ТНМ человека, чья походка является во много раз менее энергозатратной по сравнению с существующими на сегодняшний день моделями перемещения двуногих шагающих роботов.
G01L 5/00. Способы или устройства для измерения сил, например удара, работы, механической мощности или вращающего момента, предназначенные для специальных целей
Уровень техники
Найдено аналогичное решение - Системы, включающие пьезоэлектрические датчики, установленные между слоями из жесткого пластика (различных типов) или других механически подобных материалов. Датчик может дополнительно поддерживаться с помощью опорных элементов. Некоторые опорные элементы охватывают всю обувь, другие лишь часть подошвы. Съемный монтаж формируется за счет механического сцепления частей, что позволяет преобразователю быть сделанным модульным образом для использования с различными обувными датчиками или датчиками стельки, тем самым позволяя большему числу пациентов быть проанализированному и обработанному посредством использования настоящего изобретения. Также раскрыта цифровая схема интегратора сигнала заряда. US 4814661 - Системы для измерения и анализа сил, действующих во время передвижения человека от патентообладателя Washington State University Research Foundation, Inc.
Признаки, которые совпадают с объектом
В данном устройстве также задействовано 4 датчика. Подошва устройства не сгибается.
Отличительные признаки объекта разработки от аналога
Рассматриваемое устройство в патенте US 4814661 имеет другой тип датчиков - пьезоэлектрический, в разработанном устройстве используются тензодатчики (FSR). Преимуществом использования тензодатчиков является удобство считывания информации и получение более точных результатов. Цель использования устройства в патенте US 4814661 - медицинская диагностика и соответственно устройство имеет другую форму подошвы – овальную, разработанное устройство - прямоугольную. Целью разработанного устройства является измерение ТНМ человека без сгибания стопы с прямоугольной подошвой. Прямоугольная подошва обусловлена тем, что антропоморфный робот имеет аналогичную подошву. У устройства в патенте US 4814661 отсутствует передача данных по беспроводной связи в реальном времени, разработанное устройство имеет следующие преимущества: отсутствие проводов, соединяющих устройство и дисплей, и возможность размещения дисплея в любом удобном месте в пределах дальности сигнала WI-FI.
Найдено аналогичное решение - Обувь с виртуальным интеллектом и системой анализа заболеваний стоп предоставлена в виде портативной пары устройств, с виду напоминающих обувь, в каждом из которых присутствует миниатюрный электронный модуль и коврик из датчиков, являющийся неотъемлемой частью обуви, а также воздушный пакет, механически предохраняющий электронный модуль благодаря амортизации. Миниатюрный электронный модуль содержит передающий контур с датчиком давления, температуры, зуммером предупреждения о заполненной памяти, которая получает переменные сигналы напряжения при изменении давления и температуры, конвертирует их в Омы сопротивления и градусы Цельсия соответственно. Электрические сигналы могут передаваться как инфракрасный световой сигнал. Встроенный коврик из датчиков представляет собой тонкий, гибкий, плоский, прочный, и диэлектрический материал, так что массив размещенных на нем семидесяти четырех датчиков, расположенных в виде геометрического узора, тем самым обеспечивает достаточную точность сбора данных о давлении, оказываемом каждой ногой или ногами постоянно и мгновенно в статическом и динамическом случае, как в случае постоянного ношения, так и кратковременного, во время различных видов деятельности. Сочетание пары ботинок представляет собой корпусы для размещения электроники, цифрового сканера ноги, портативного инфракрасного модуля и центрального анализатора данных, выявляющего заболевания стоп для обеспечения точной информации. Полученная от каждого человека информация может быть сохранена и проанализирована с целью диагностики заболеваний ноги или ног. Обувь с виртуальным интеллектом и системой анализа заболеваний стоп является повседневной, и в конечном итоге может быть использована любым человеком. Благодаря ей возможно получать информацию о состоянии ног, вносить изменения в биомеханику ходьбы, изменяя обувь, и т.п. US 6195921 - Обувь с виртуальным интеллектом и системой анализа заболеваний стоп от патентообладателя Vinncente Hoa Gia Truong.
Признаки, которые совпадают с объектом. Расположение датчиков на стопе.
Отличительные признаки объекта разработки от аналога. У данного устройства множество датчиков в отличие от разработанного, что обусловлено спецификой применения данного устройства - измерение распределения давления в стопе. Для разработанного устройства такое большое количество сенсоров нецелесообразно и нерентабельно, поскольку целью является измерение местонахождения только одной точки - ТНМ. У данного устройства отсутствует передача данных по беспроводной связи в реальном времени: информация хранится внутри устройства и может считываться по беспроводной инфракрасной связи, но не в реальном режиме времени, поэтому разработанное устройство имеет преимущество - получение и отображение данных в реальном времени. Устройство в патенте US 6195921 используется в медицине, имеет другую форму подошвы - овальная вместо прямоугольной. Подошва устройства в патенте US 6195921 гибкая - это обувь, которая применяется для медицинской диагностики, у разработанного устройства - жесткая, используется только в лабораторных условиях для получения измерения ТНМ человека при передвижении без сгибания стопы с прямоугольной подошвой, поскольку робот также имеет прямоугольную подошву, которая не сгибается во время ходьбы. Устройство в патенте имеет другой тип датчиков - пьезоэлектрический, в разработанном устройстве - тензодатчики.
Найдено аналогичное решение - Полезная модель представляет собой обувь, измеряющую силу давления стоп, которая используется для расчета положения ТНМ, относится к технической области робототехники и датчиков, в частности к обуви, измеряющей силу и используемой для измерения положения ТНМ, и к технической области, в которой такие параметры, как распределение сил давления в подошве, силы трения и т.п. могут быть измерены во время ходьбы человека.
Полезная модель включает пару ботинок, подошва каждого из которых снабжена множеством датчиков типа "шип" и характеризуется тем, что датчик обуви типа "шип" содержит эластичный корпус, печатную плату и нижнюю пластину; упругое тело связано с нижней пластиной, которая соединена с самим ботинком; печатная плата расположена в упругом теле. Полезная модель представляет собой обувь, измеряющую силу давления стоп, которая используется для расчета положения ТНМ, преимуществами которой являются: простая структура и широкий спектр приложений; модель может удовлетворить требования к различным дорожным условиям и типам ходьбы, никак не влияя на нормальную ходьбу человека. CN 201233287 - Обувь для измерения положения ТНМ на основе измерения сил давления стопы.
Признаки, которые совпадают с объектом. Общая цель измерения ТНМ человека.
Отличительные признаки объекта разработки от аналога. Устройство в патенте CN 201233287 имеет другой тип датчиков "датчики-шипы" (Spike sensor), в разработанном устройстве используются тензодатчики (FSR). Преимуществом использования тензодатчиков является простота и удобство использования.
Найдено аналогичное решение - Устройство для определения положения центра тяжести человека, включающее основание, грузовую платформу для размещения на ней человека, установленную на упомянутом основании, по меньшей мере три датчика нагрузки, из которых по меньшей мере два датчика нагрузки расположены под платформой у одной ее кромки и по меньшей мере один датчик нагрузки расположен под платформой у кромки, противолежащей первой, а также по меньшей мере одно устройство для измерения и регистрации выходного сигнала по меньшей мере одного датчика нагрузки. RU 2271145 - УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ЧЕЛОВЕКА от патентообладателя Густов Сергей Юрьевич.
Признаки, которые совпадают с объектом. Похожая схема расположения датчиков.
Отличительные признаки объекта разработки от аналога. Устройство в патенте RU 2271145 имеет другую форму реализации, используется грузовая платформа для размещения на ней человека с применением пьезоэлектрических датчиков в отличие от разработанного устройства, конструкция которого представляет собой прямоугольные подошвы с использованием FSR датчиков, данная конструкция позволяет получить более точные данные.
Краткое описание чертежей
Представлены чертежи, поясняющие изобретение:
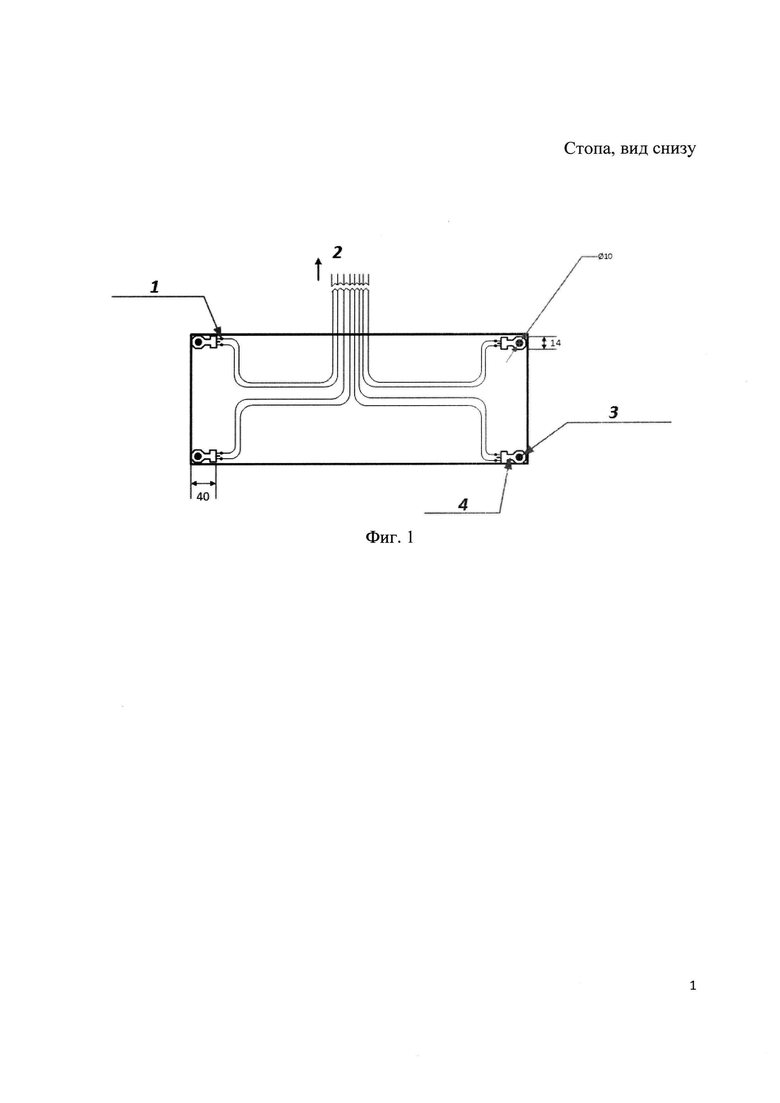
Фиг. 1 - Стопа, вид снизу. По краям платформы расположены резистивные
датчики силы.
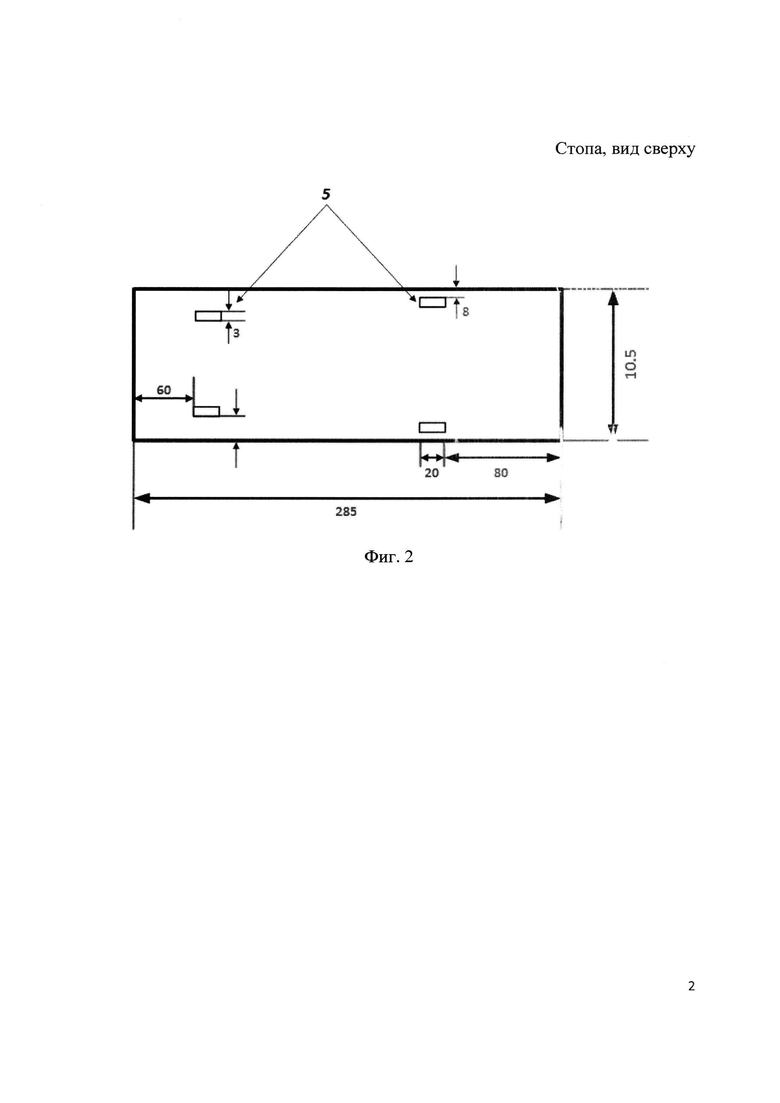
Фиг. 2 - Стопа, вид сверху.
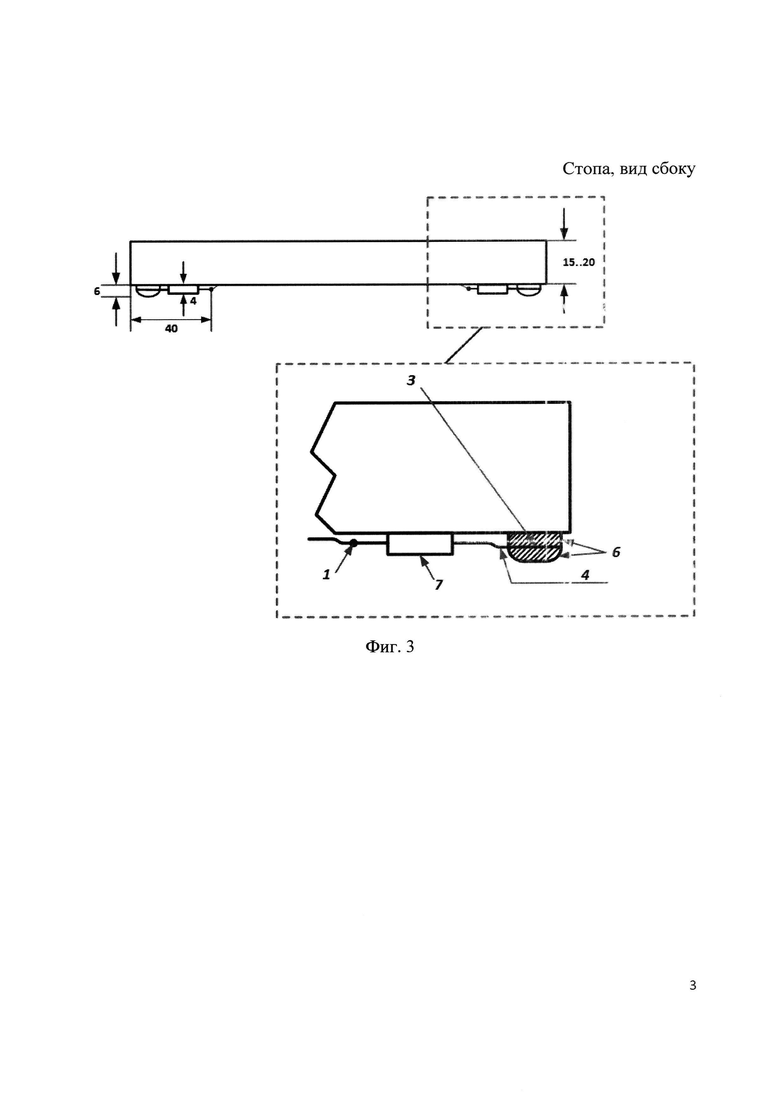
Фиг. 3 - Стопа, вид сбоку. Чувствительная часть сенсора располагается между двумя подложками из резины.
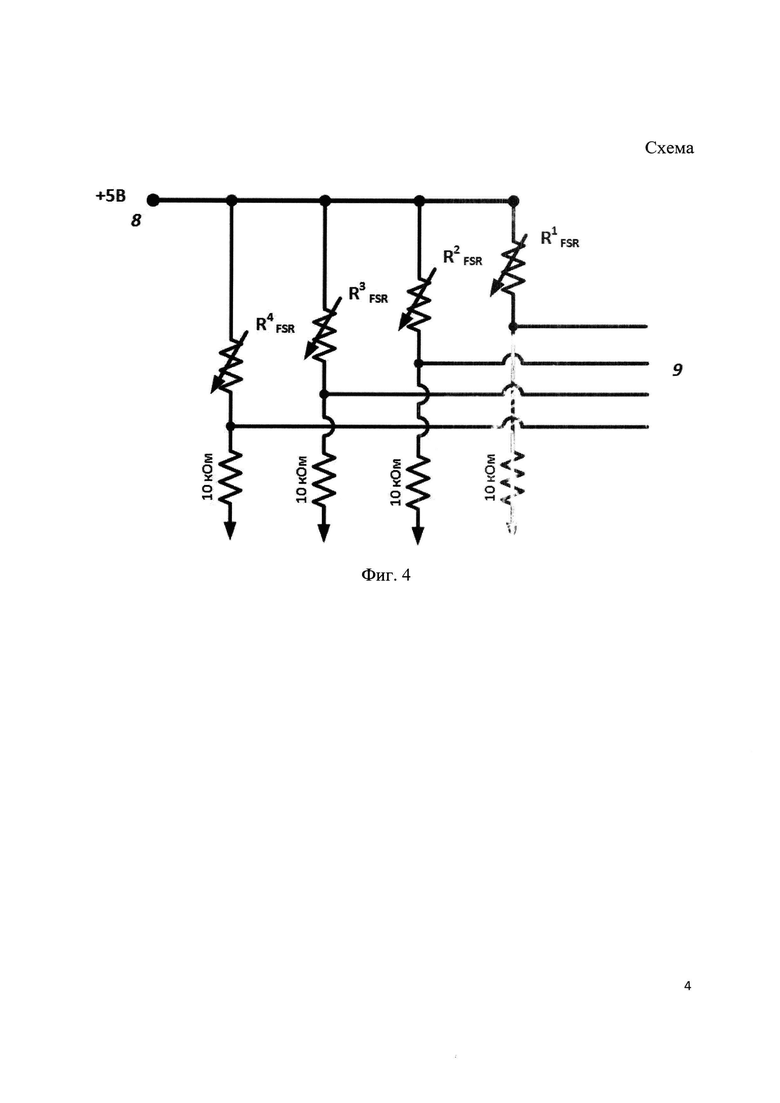
Фиг. 4 - Схема подключения измерительных датчиков FSR-типа.
Раскрытие и осуществление изобретения.
Устройство состоит из двух подошв прямоугольной формы, по углам которых размещены 4 (четыре) резистивных (FSR) датчика силы FlexiForce А201 (4) производства компании Tekscan, обладающие следующими характеристиками: длина датчика - 50,8 мм, толщина датчика - 0,2 мм, диаметр чувствительной области (3) - 9,7 мм, максимальная сила - 1110 H, температурный диапазон - от -40 до 60 градусов Цельсия. Материал, из которого изготовлены подошвы - полиамид. В подошве сделаны две пары прорезей (5), через которые пропускаются эластичные ремни для фиксации подошвы на ноге. Чувствительная часть сенсора (3) располагается между двумя подложками из резины (6). Верхняя подложка жестко крепится к нижней поверхности стопы.
На выходе сенсора находится переходник FlexiForce Male Berg Connector (7), представляющий собой стандартное комплектующее изделие, выпускаемое компанией Tekscan, к выводам которого (1) припаяны провода, объединяющиеся в гибкую шину. С помощью гибкой шины проводов датчики каждой стопы подключаются к плате микроконтроллера Arduino Uno (V.3) (2), обладающей следующими характеристиками: микроконтроллер - ATmega328, рабочее напряжение - 5B, цифровые входы/выходы - 14 (из них 6 могут использоваться в качестве ШИМ-выходов), тактовая чистота - 16 МГц, где сигнал с каждого датчика считывается и преобразуется в цифровую форму.
FSR датчики (4) подключаются к аналоговым входам Arduino Uno (9) по схеме делителя напряжения, при этом каждый датчик занимает одно из плеч соответствующего ему делителя напряжения.
Плата Arduino соединена с WI-FI модулем Arduino WiFi Shield, который позволяет отправлять данные с сенсоров на персональный компьютер по беспроводной связи. Таким образом, элементы питания (8), платы Arduino Uno и Arduino WiFi Shield образуют блок считывания и первичной обработки данных. Он расположен возле голеностопа человека и жестко закреплен эластичной лентой.
Компьютер, оснащенный WI-FI интерфейсом, осуществляет прием и окончательную обработку данных. Специальных требований к компьютеру не предъявляется, за исключением того, что компьютер должен иметь не менее 2 Гб оперативной памяти и двухъядерный процессор с частотой процессора не менее 2 ГГц, а также дисплей для отображения информации. Тип операционной системы не имеет особого значения, поскольку для разработки программного обеспечения использовался язык C++ и библиотека QT4.
Специально разработанное программное обеспечение осуществляет мониторинг порта компьютера, отвечающего за беспроводной канал. Способ обработки данных следующий. Полученные данные накапливаются и при получении полного пакета данных для всех восьми сенсоров производится расчет положения ТНМ в соответствии со следующим алгоритмом:
1. Получение пакета данных, соответствующего показаниям всех восьми сенсоров.
2. Конвертирование полученных данных из кодов АЦП в значения напряжения, затем на основе полученных значений расчет мгновенного значения R сопротивления FSR датчика.
3. Расчет значения силы давления на основании в соответствии с функцией калибровки F=F(R).
4. Расчет координат X и Y ТНМ в соответствии с формулой (I).
5. Визуализация новой точки траектории ТНМ на дисплее ПК.
Расчет положения ТНМ производится по формуле:
 ,
,
где Pi - показания i-го датчика силы,
Xi - координата i-го датчика силы,
Pо - общая сумма всех сил, действующих на датчики.
В результате работы алгоритма траектория ТНМ прорисовывается на экране.
| название | год | авторы | номер документа |
|---|---|---|---|
| Образовательно-исследовательский комплекс робот малый антропоморфный | 2019 |
|
RU2718513C1 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА ВОЗМОЖНОСТИ НЕРАЗРУШАЮЩЕГО ПЕРЕМЕЩЕНИЯ ИЛИ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2021 |
|
RU2783801C1 |
| УСТРОЙСТВО РЕГИСТРАЦИИ ПАРАМЕТРОВ ПЕРЕРАСПРЕДЕЛЕНИЯ МАССЫ НОСИМОГО ГРУЗА БИОМЕХАНИЧЕСКИХ АНТРОПОМОРФНЫХ СРЕДСТВ (ПАССИВНЫХ ЭКЗОСКЕЛЕТОВ) | 2017 |
|
RU2660510C1 |
| НИЖНЯЯ ЧАСТЬ ОБОЛОЧКИ СКАФАНДРА | 2002 |
|
RU2225333C2 |
| СИСТЕМА ДИАГНОСТИКИ ОПОРНО-ДВИГАТЕЛЬНОЙ ФУНКЦИИ ЧЕЛОВЕКА | 1996 |
|
RU2116046C1 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2296668C2 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2272705C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА ЧЕЛОВЕКА И СТЕЛЬКА, ПРЕДНАЗНАЧЕННАЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531697C1 |
| Мобильный шагающий робот | 2023 |
|
RU2834558C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ ШАГАЮЩИМ КОПИРУЮЩИМ РОБОТОМ | 1997 |
|
RU2134193C1 |
Устройство определения положения точки нулевого момента (ТНМ) при ходьбе человека без сгибания стопы представляет собой две прямоугольной формы подошвы с креплениями к ноге человека. По краям каждой подошвы размещено 4 тензодатчика, чувствительные части которых располагаются между двумя подложками из резины. Тензодатчики подключены гибкой шиной проводов к плате микроконтроллера. Сигнал с каждого датчика считывается и преобразуется в цифровую информацию для дальнейшей передачи на компьютер, где происходит расчет траектории ТНМ человека при ходьбе в целях дальнейшего использования полученных данных в процессе создания математической модели передвижения антропоморфного шагающего бипедального робота для обучения ходьбе антропоморфного робота. Технический результат – повышение точности определения положения точки нулевого момента при ходьбе человека без сгибания стопы. 4 ил.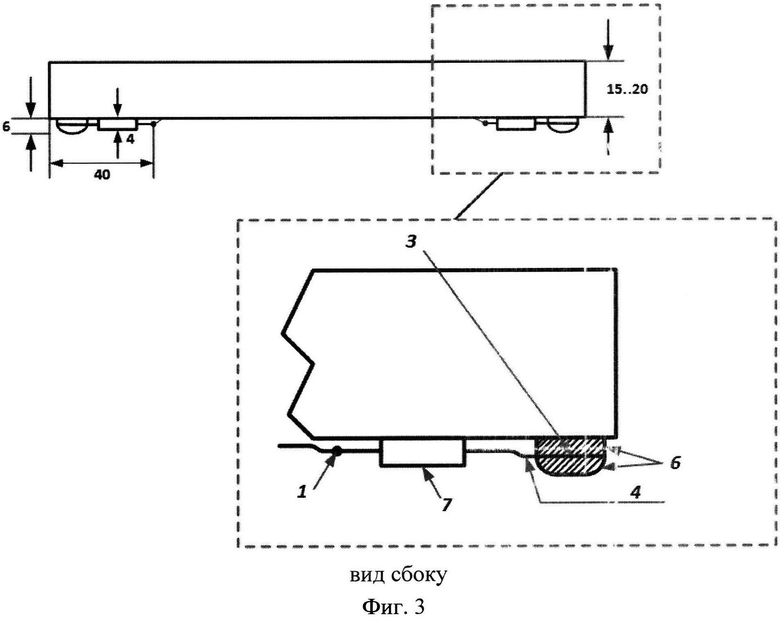
Устройство определения положения точки нулевого момента (ТНМ) при ходьбе человека без сгибания стопы состоит из двух подошв, выполненных из материала полиамида, отличающихся прямоугольной формой, по углам которых размещены 4 резистивных тензодатчика силы, при этом чувствительная часть сенсора располагается между двумя подложками из резины, при этом подложка жестко крепится к нижней поверхности стопы, и на конце сенсора находится переходник, к выходам которого припаяны провода, объединяющиеся в гибкую шину, посредством которой датчики каждой стопы подключаются к плате микроконтроллера, где сигнал с каждого датчика считывается и преобразуется в цифровую форму, при этом плата соединена с вай-фай модулем, который по беспроводной сети отправляет данные с сенсоров на компьютер, где происходит расчет траектории ТНМ для дальнейшего использования полученных данных в процессе создания математической модели передвижения антропоморфного шагающего бипедального робота для обучения ходьбе антропоморфного робота.
| CN 101554894 A, 14.10.2009 | |||
| CN 101329206 A, 24.12.2008 | |||
| KR 2009060755 A, 15.06.2009 | |||
| US 8126594 B2, 28.02.2012. |

