Область применения
Изобретение относится к области робототехники, измерительной техники, машиностроению, мобильным робототехническим комплексам. Устройство позволяет неразрушающим контактным способом анализировать возможность перемещения (сдвига, опрокидывания и пр.) препятствий (предметов) на пути следования автономного робототехнического комплекса. Устройство содержит зонд-манипулятор цилиндрической формы, на торцевой и боковой поверхности которого закреплены датчики нормальной составляющей силы, причем к датчикам подведены выводы, подключенные к измерительному интерфейсу системы автоматического управления. Анализ возможности устранения препятствия производится на основе измерительной информации, полученной с датчиков.
Устройство позволяет расширить функциональные возможности автономного робототехнического комплекса и повысить его адаптируемость к окружающей среде, увеличить степень автономности комплекса.
Уровень техники
Широко известны устройства и способы обнаружения препятствий и их обхода роботизированными системами [1-3]. Для этого используются анализ изображений [1], полученных с камер или иных видеодатчиков, оптическая [2, 3], ультразвуковая [3] локация и пр. Однако использование подобных устройств позволяет только обнаружить предмет, мешающий передвижению роботизированной системы и изменить траекторию движения. В случае плотно расположенных предметов последнее невозможно, но предметы могут представлять собой только мнимую преграду для передвижения комплекса (легкие объекты, относительно высокая трава и пр.).
Известны [4-6] медицинские роботы-манипуляторы, роботизированные системы и способы измерения усилия, прикладываемого к медицинскому инструменту. Однако использование сложных многокомпонентных силомоментных датчиков усложняет конструкцию и увеличивает ее стоимость.
Известны роботизированные системы, способные распознавать столкновения с препятствиями [7] или содержащие систему анализа ударов, которая способна отличать удар, вызванный наличием препятствия от ударов вследствие неровностей поверхности земли [8]. Однако недостатком подобных устройств является невозможность количественного определения силы воздействия со стороны препятствий и анализа смещения мешающего предмета и т.п.
Известен манипулятор антропоморфного робота [9]. Устройство содержит кисть, состоящую из пяти пальцев, фаланги которых шарнирно соединены между собой, механизм сгибания и разгибания всех пальцев и механизм лучеобразного разведения четырех пальцев. В каждой фаланге с внутренней стороны кисти установлены датчики усилия сжатия, в качестве примера которых рассматриваются тензодатчики. Кисть может быть помещена в оболочку типа «искусственная кожа», в которой расположены тактильные датчики. На ладони размещены предварительно обучаемый микроконтроллер, соединенный, в том числе с тензодатчиками и тактильными датчиками в «искусственной кожи», а также акселерометр, позволяющий определять ориентацию кисти в поле тяжести Земли. Использование тактильных датчиков и датчиков усилия сжатия позволяет фиксировать момент касания кистью предмета и осуществлять его адаптивный захват. Данное устройство является наиболее близким аналогом и может быть принято за прототип. Недостатком является конструкция данной системы, которая удобна для захвата предметов, имеющих соответствующие габариты, и фиксации касания, но неудобна и чрезмерно сложна для использования в качестве зондирующего устройства для анализа возможности устранения препятствия на пути следования.
Раскрытие изобретения
Целью настоящего изобретения является решение задачи расширения функциональных возможностей автономного робототехнического комплекса и повышения его адаптируемости к окружающей среде, увеличения степени автономности комплекса, снижения степени участия человека в управлении комплексом.
Технический результат в предлагаемом устройстве заключается в осуществлении анализа возможности перемещения (сдвига, опрокидывания и пр.) препятствий (предметов) на пути следования автономного робототехнического комплекса неразрушающим контактным способом.
Технический результат достигается тем, что устройство для анализа возможности неразрушающего перемещения или преодоления препятствий робототехнического комплекса, имеющее датчики силы, отличающееся тем, что содержит зонд-манипулятор в виде стержня, один конец которого выполнен с возможностью установки на робототехнический комплекс, причем на торцевой поверхности закреплен по крайней мере один датчик нормальной составляющей силы и на боковой поверхности закреплен по крайней мере один датчик нормальной составляющей силы, при этом к датчикам подведены выводы, подключенные к измерительному интерфейсу системы автоматического управления.
Описание чертежей
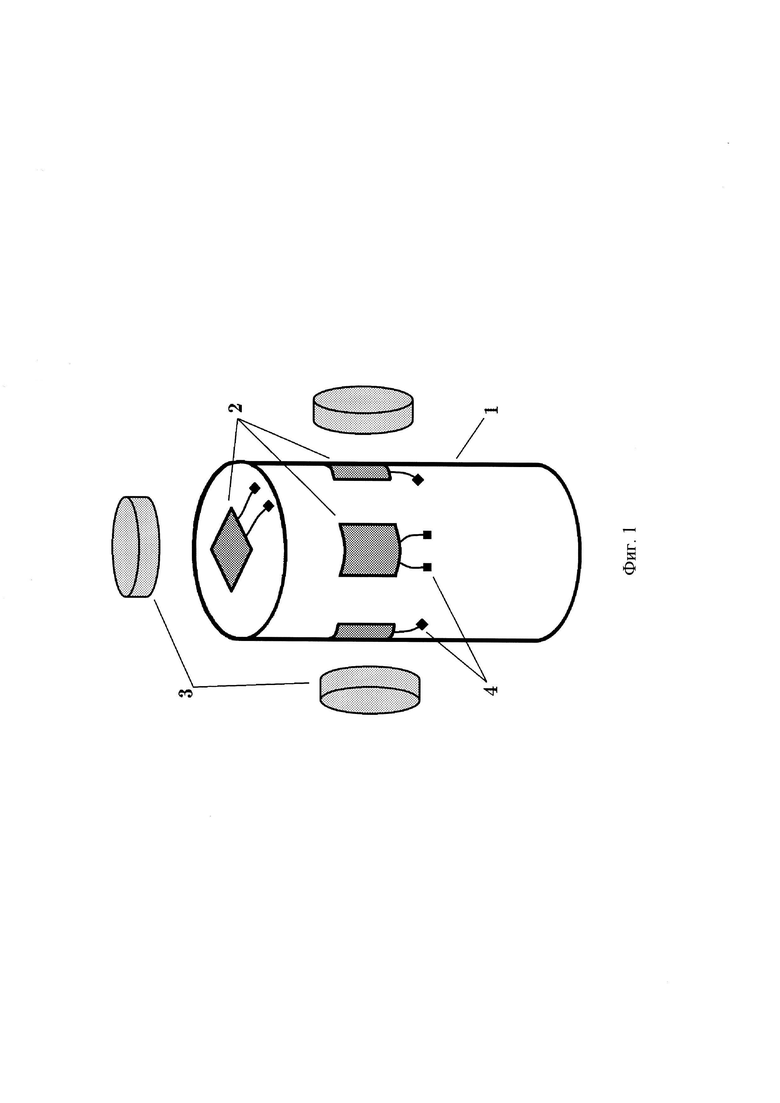
На фиг. 1 представлена схема предлагаемого устройства.
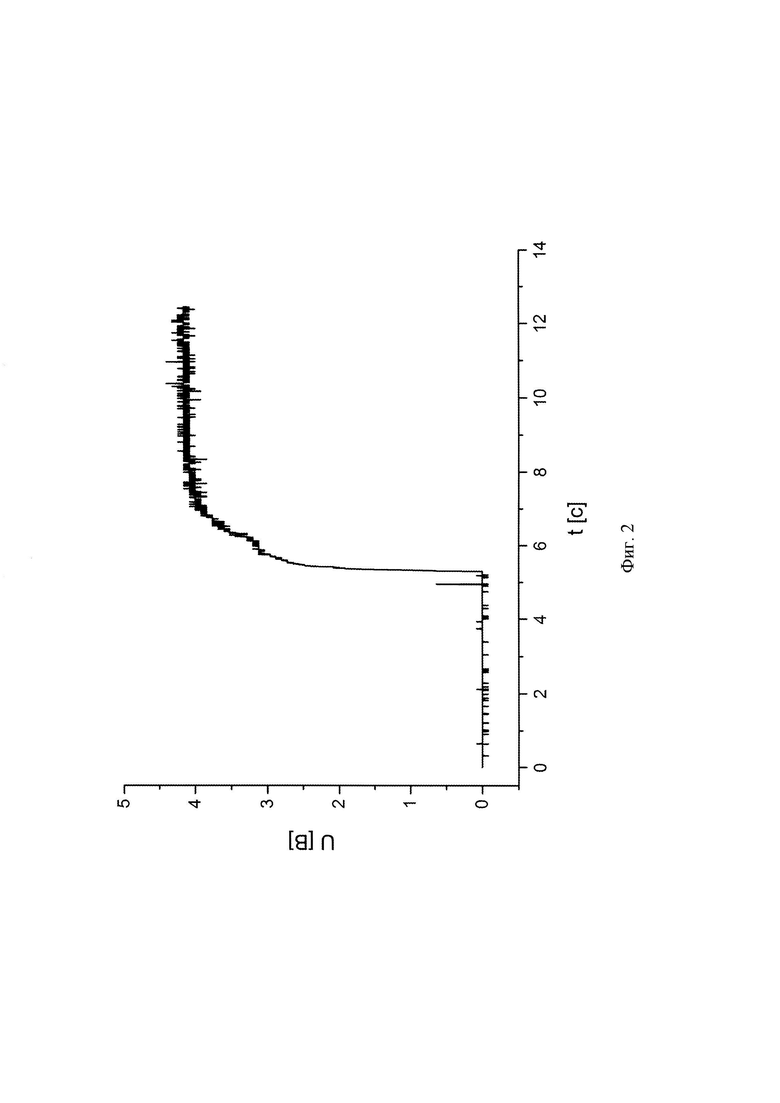
На фиг. 2 показана зависимость напряжения на резисторе от времени в случае упора зонда-манипулятора в неподвижный предмет с постоянным (предельным) усилием.
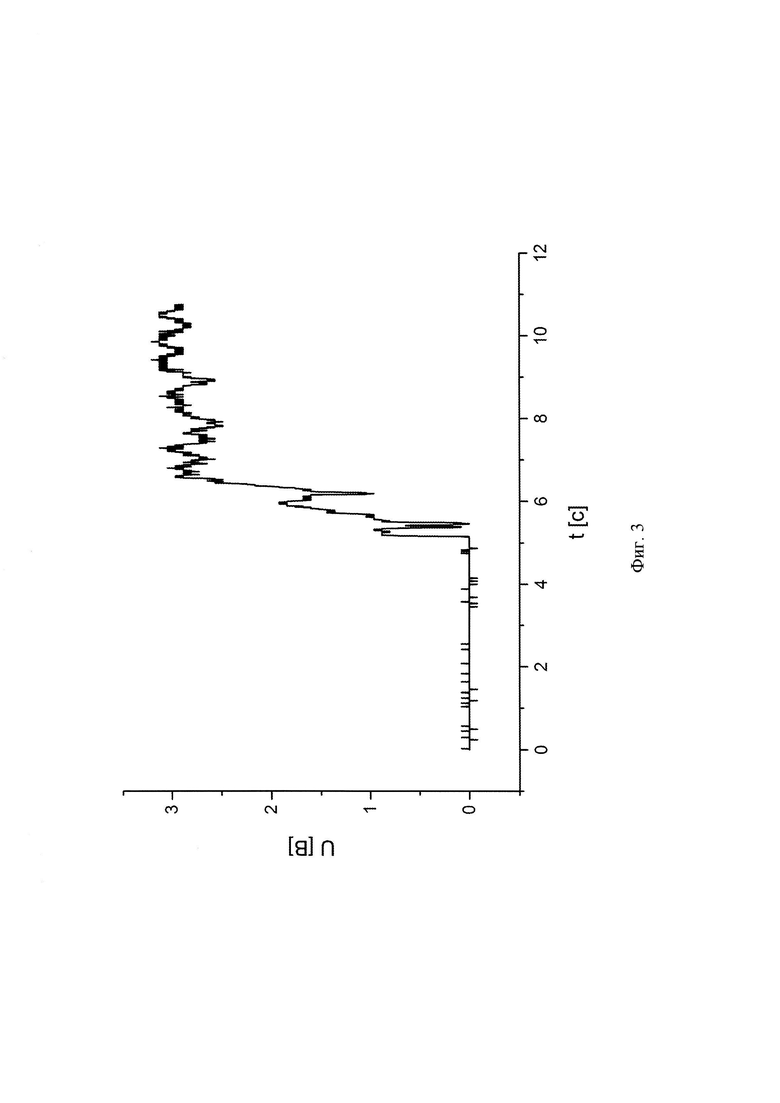
На фиг. 3 показана зависимость напряжения на резисторе от времени в случае толкания зондом-манипулятором сдвигаемого предмета с постоянным усилием.
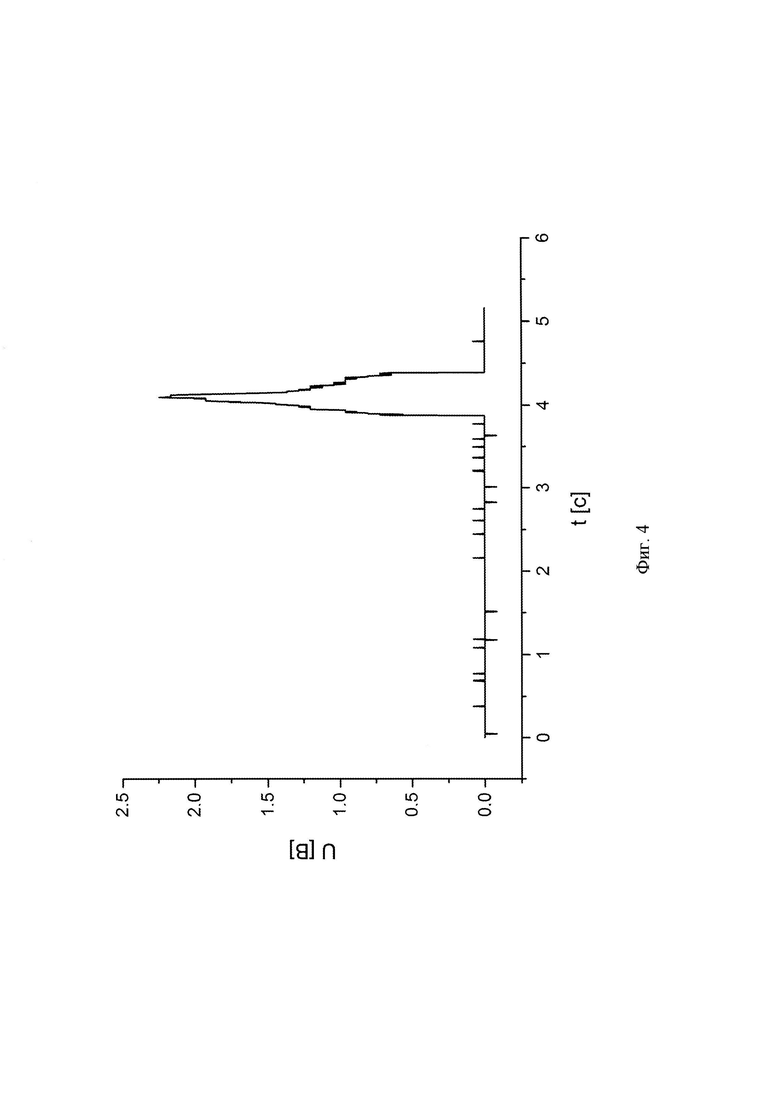
На фиг. 4 показана зависимость напряжения на резисторе от времени в случае толкания зондом-манипулятором предмета с постоянным усилием и последующим опрокидыванием предмета.
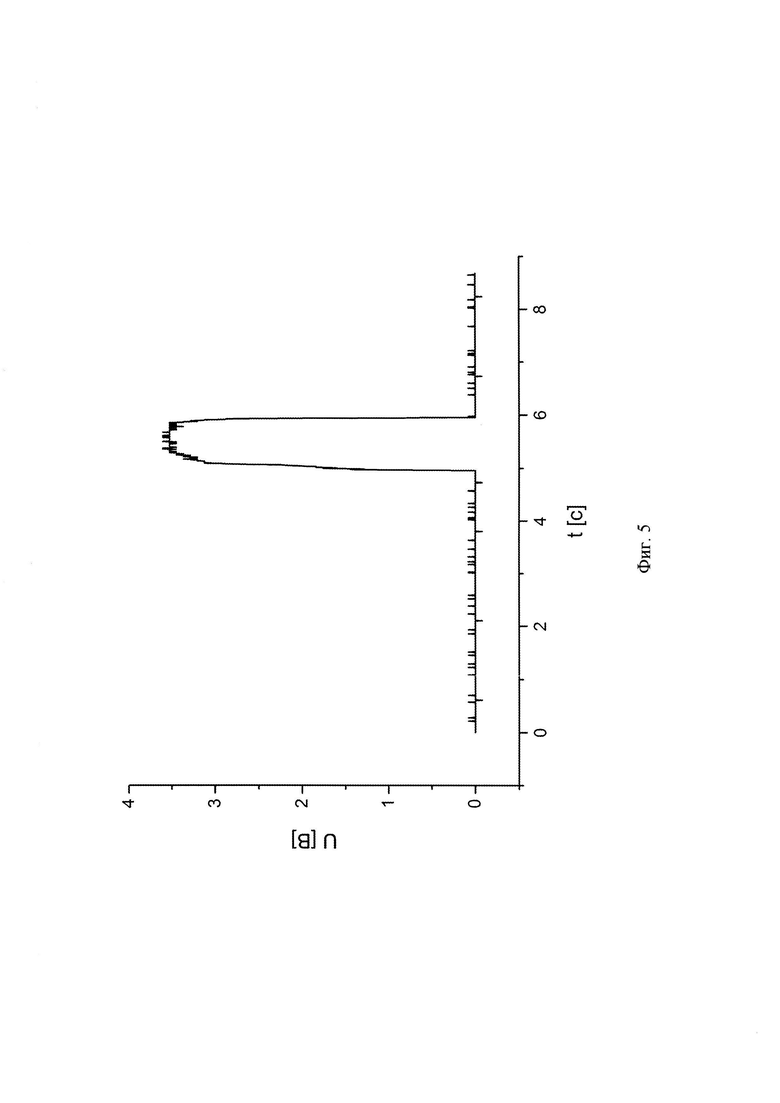
На фиг. 5 показана зависимость напряжения на резисторе от времени в случае толкания зондом-манипулятором более массивного предмета (по сравнению со случаем на Фиг. 4) с постоянным усилием и последующим опрокидыванием предмета.
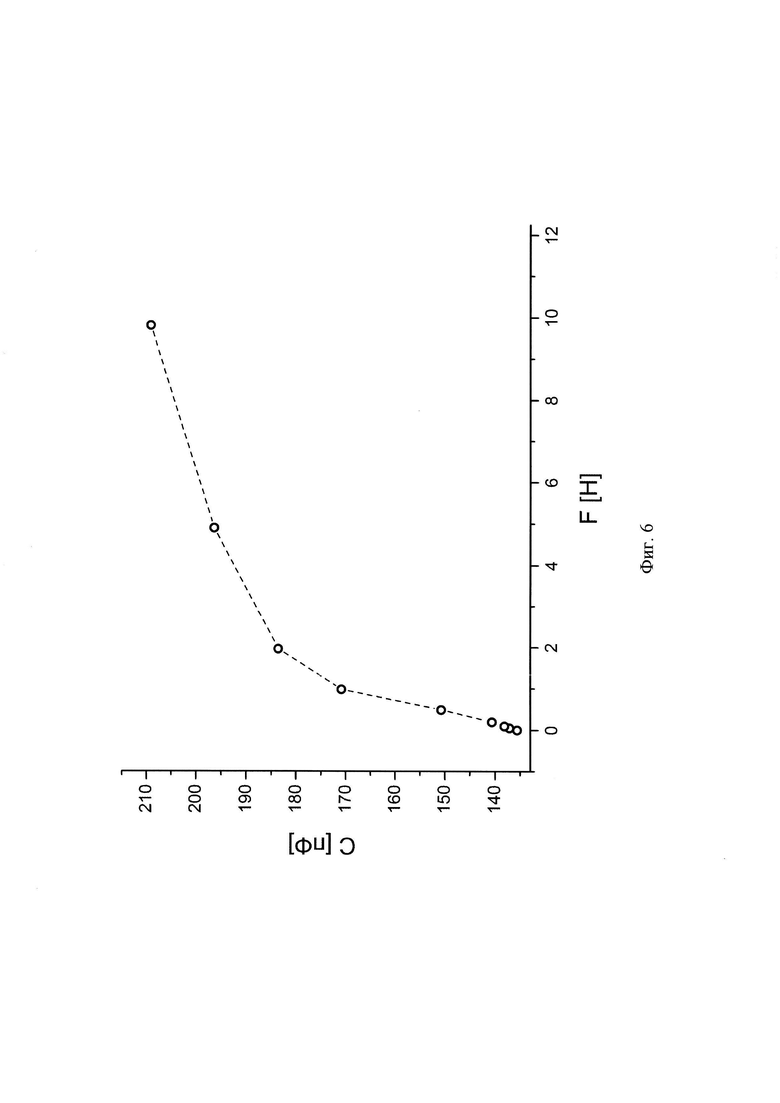
На фиг. 6 показана зависимость величины емкости изготовленного емкостного датчика нажима с площадью 10×7 мм2 от приложенной силы F.
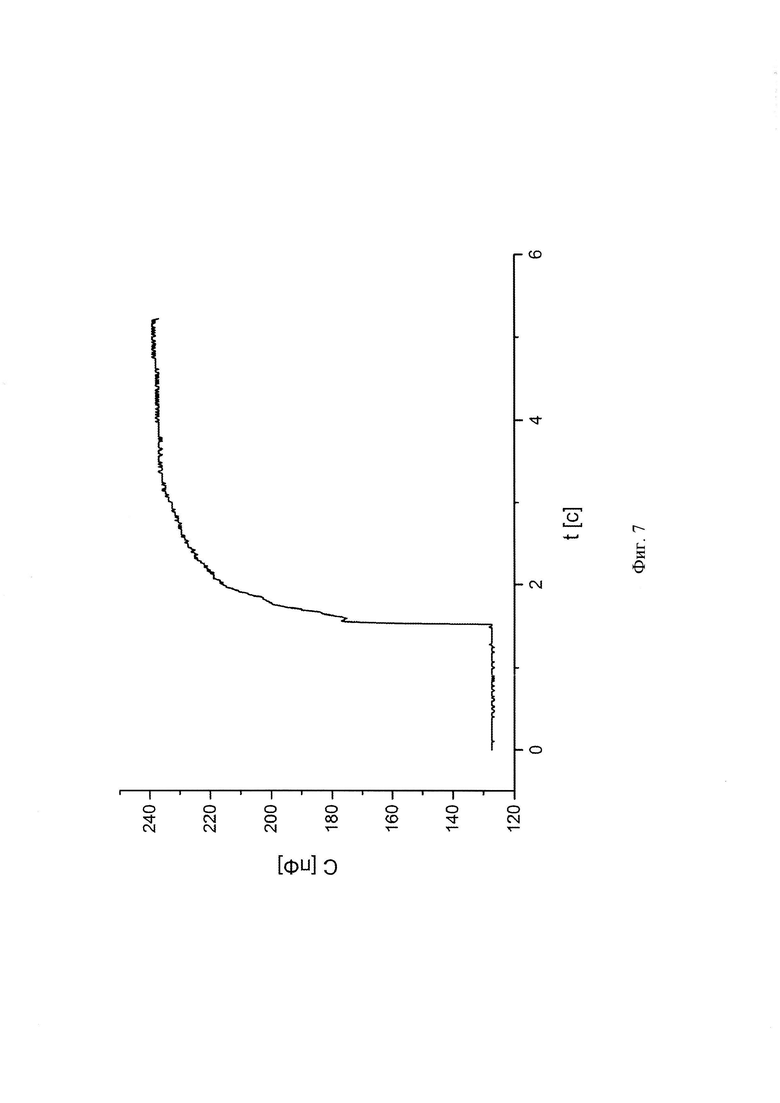
На фиг. 7 приведена зависимость измеренной емкости датчика с размерами 10×7 мм2, установленного на зонд-манипулятор, от времени в случае упора зонда-манипулятора в неподвижный предмет с постоянным (предельным) усилием.
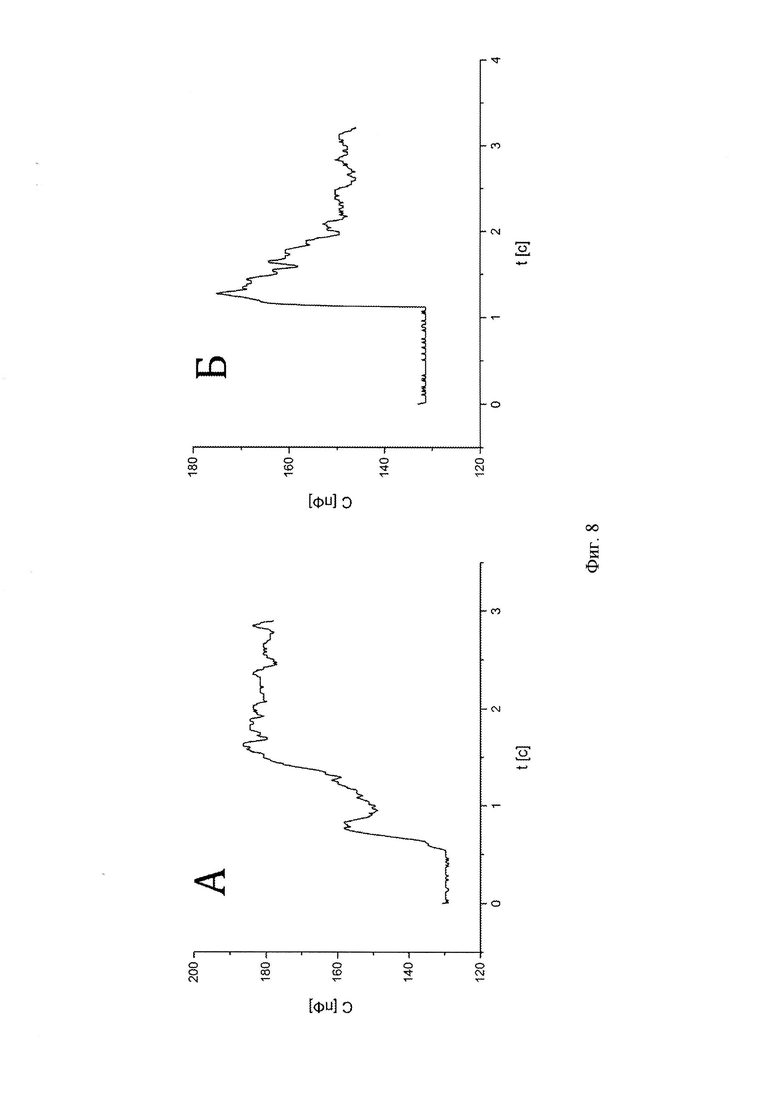
На фиг. 8 приведены зависимости измеренной емкости датчика размерами 10×7 мм2, установленного на зонд-манипулятор, от времени в случае толкания зондом-манипулятором сдвигаемого предмета с постоянным усилием (А, Б - более тяжелый и более легкий предметы, соответственно).
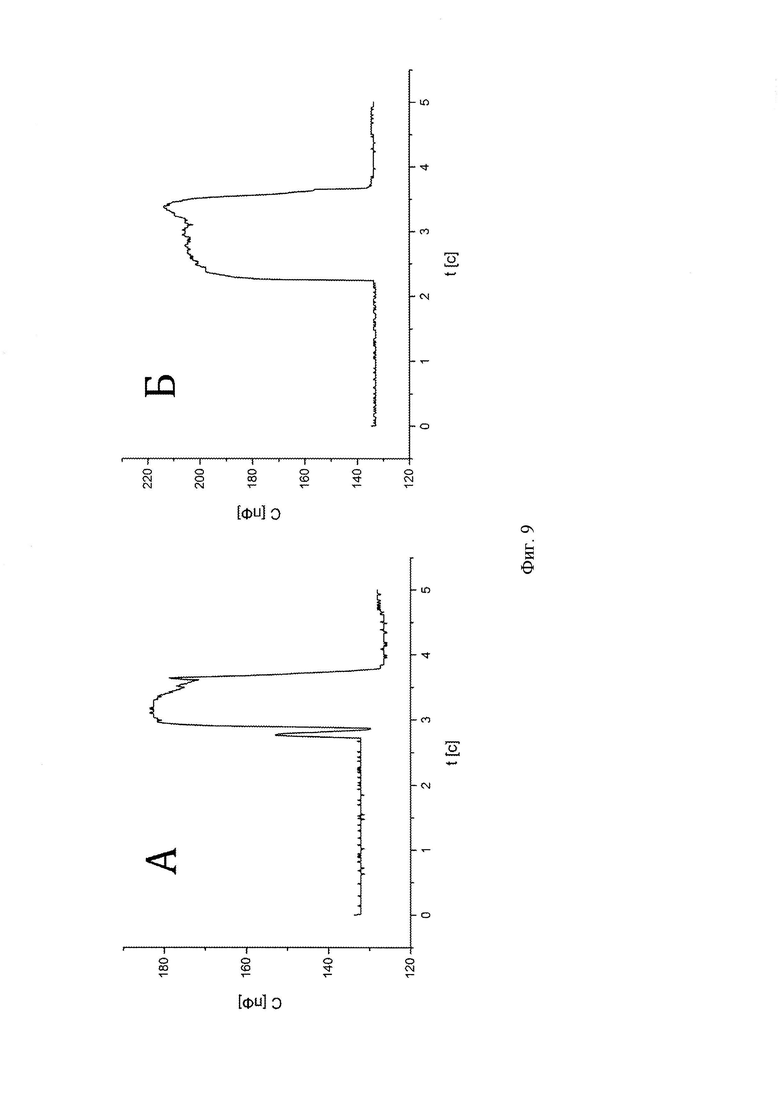
На фиг. 9 приведены зависимости измеренной емкости датчика, установленного на зонд-манипулятор, от времени в случае толкания зондом-манипулятором с постоянным усилием и последующим опрокидыванием предмета (Фиг. 9А - более легкий предмет, Фиг. 9Б - более массивный).
Осуществление изобретения
Устройство состоит из следующих элементов, показанных на чертеже (Фиг. 1). Зонда-манипулятора 1 в виде стержня, на торцевой и боковой поверхности которого закреплены датчики нормальной составляющей силы 2 (силы нажима). Конец зонда-манипулятора, на котором отсутствуют датчики, выполнен с возможностью установки на робототехнический комплекс. Датчики накрываются мягкими накладками 3 из силикона, резины или иного материала для обеспечения контакта с препятствием в области расположения датчиков, а также для более равномерного распределения силы по площади датчика. Выводы датчиков 4 подключаются к измерительному интерфейсу системы автоматического управления контактным способом, либо к системе, способной передавать измерительную информацию с них беспроводным способом.
Устройство работает следующим образом. Роботизированный комплекс при обнаружении органами технического зрения препятствия приближается к нему, затем с помощью зонда-манипулятора 1, либо жестко закрепленного на корпусе комплекса, либо установленного в специальном механическом манипуляторе («механическая рука» и пр.), осуществляет попытку механического воздействия на препятствие. Воздействие может, например, заключаться в попытке отодвинуть препятствие с помощью органов передвижения комплекса (движителя) или попытке сдвинуть препятствие толканием зонда-манипулятором и пр. При этом возникает механический контакт между препятствием и зондом-манипулятором, сила воздействия комплекса на препятствие порождает силу противодействия, которая воздействует на датчики нормальной составляющей силы 2. Следует отметить, что деликатное перемещение предметов может быть осуществлено с помощью механических манипуляторов типа «рука» и т.п., однако их использование невозможно в случае относительно легких, но габаритных предметов, плотно расположенных легких объектов и т.п.
В качестве датчиков силы могут быть использованы любые подходящие датчики, использующие различные физические принципы. Для увеличения вероятности воздействия силы именно на области расположения датчиков используются мягкие накладки 3 из силикона, резины или иного подобного материала. Накладки, деформируясь, передают силу на датчики, одновременно распределяя ее на большую площадь. Это актуально в случае препятствий с выраженными резко выступающими элементами. При этом используются несколько датчиков - один расположенный на торцевой поверхности зонда-манипулятора, остальные - на его боковой поверхности. Использование датчиков на боковой поверхности позволяет осуществлять зондирование не только с помощью поступательного движения, но и с помощью вращательного, будь то поворот зонда с помощью механической руки или иного органа или поворот корпуса всего комплекса в целом. Величина нормальной силы, действующая на датчик, преобразуется в электрический сигнал и поступает на интерфейс системы автоматического управления комплексом и анализируется. По характеру изменения сигнала с активного датчика, который взаимодействует с препятствием, система управления определяет характер взаимодействия с предметом (статичный, сдвигаемый и т.п.). Дополнительно при этом могут использоваться данные с других инструментов комплекса - акселерометров, фиксирующих перемещение комплекса в целом или механического манипулятора, в котором закреплено устройство, органов технического зрения, отслеживающих изменение положение предмета и т.п.
Образцы устройства были изготовлены следующим образом. В качестве зонда-манипулятора использовались цилиндрические стержни из диэлектрического материала (полиэтилен и т.п.), на торцевую и боковую поверхности которых наклеивались датчики силы нажатия. Один из образцов зонда был изготовлен на основе резистивных датчиков FSR (Force-sensing resistor) [10]. Для снятия сигнала с датчиков использовалась простейшая электрическая цепь, состоящая из последовательно включенного датчика и постоянного резистора номиналом 10 кОм [10]. При увеличении силы нажатия сопротивление датчика уменьшается, напряжение на резисторе при этом увеличивается. Сигнал напряжения может быть оцифрован с помощью АЦП.
На Фиг. 2 приведена зависимость напряжения на резисторе от времени в случае упора зонда-манипулятора в неподвижный предмет с постоянным (предельным) усилием. В начальный момент, когда сила нажима увеличивается, сигнал с резистора также растет, достигая предельного значения ~ 4 В.
На Фиг. 3 приведена зависимость напряжения на резисторе от времени в случае толкания зондом-манипулятором сдвигаемого предмета с постоянным усилием. Аналогично случаю недвижимого предмета, в начальный момент, когда сила нажима увеличивается, сигнал с резистора также растет, достигая значения ~ 3 В, меньшего, нежели чем в случае недвижимого предмета. Кроме того, при движении предмета возникают колебания силы нажатия, что приводит к появлению колебаний сигнала, существенно превышающих шумы. Подобное может наблюдаться и в момент касания, когда сила нажатия увеличивается (Фиг. 3).
На Фиг. 4 приведена зависимость напряжения на резисторе от времени в случае толкания зондом-манипулятором предмета с постоянным усилием и последующим опрокидыванием предмета. Сначала сила нажатия увеличивается, затем, когда предмет начинает падать, сигнал уменьшается до нуля.
На Фиг. 5 приведена зависимость напряжения на резисторе от времени в случае толкания зондом-манипулятором более массивного предмета (по сравнению со случаем на Фиг. 4) с постоянным усилием и последующим опрокидыванием предмета. Данная кривая отличается от случая (Фиг. 4) наличием «плато», которое соответсвует постоянной силе нажатия на уже наклоняющийся, но стремящийся вернуться в исходное положение, предмет.
В случае крайне легких предметов (например, лист бумаги) сигнал остается близким к нулю.
Как видно, кривые отличаются друг от друга, что позволяет различать данные события. В случае перемещения предмета (толкания) дополнительно может быть использована информация от других датчиков роботизированной системы, отслеживающих перемещение (акселерометры и т.п.). Решение задач различения взаимодействия с объектами в случае конкретной роботизированной системы может быть проведено с помощью машинного обучения.
Во втором варианте использовались емкостные датчики нормальной составляющей силы на основе алюминия, покрытого оксидной пленкой, предложенные в [11]. Одно из преимуществ использования емкостных датчиков - существенно меньшее энергопотребление, вызванное крайне незначительными омическими потерями в проводниках, потерями в диэлектрике и потерями на излучение электромагнитных волн. Это имеет принципиальное значение для автономных роботизированных систем, питающихся от аккумуляторных батарей.
Датчики представляют собой алюминиевые пластины из фольги, покрытые окисью алюминия. Окись алюминия деформируется при приложении нормально действующей силы, при этом, являясь превосходным диэлектриком, изолирует пластины от гальванического контакта. С возрастанием силы нажатия на плоскость датчика его электрическая емкость увеличивается. Относительная диэлектрическая проницаемость окиси алюминия составляет порядка 10, что позволяет дополнительно увеличить на порядок начальную емкость полученного конденсатора. Для герметизации элементов датчика и для предохранения элементов датчика от механических, химических воздействий и загрязнения используется пакет из плотной и жесткой полимерной пленки. Использование пакета также позволяет плотно прижать пластины друг к другу с небольшой начальной силой.
Образцы датчика были изготовлены следующим образом. В качестве обкладок использовались две пластины из алюминиевой фольги с размерами порядка 10×7 мм2. Предварительно обе полосы анодировались в 20%-м растворе серной кислоты при плотности тока 10-15 мА/см2. Каждая обкладка имела электрический вывод, соединенный с небольшим участком неанодированного алюминия с помощью пайки. Полученные пластины складывались и жестко запечатывались в герметичный пакет из жесткой полимерной пленки.
На Фиг. 6 приведена зависимость величины емкости изготовленного датчика от приложенной силы F. Измерения емкости проводились LCR-метром на частоте 100 кГц с разрешением по электрической емкости 0.01 пФ. При начальной величине емкости около 135 пФ ее значение достигает ~210 пФ при приложении силы F=10 Н. Чувствительность не является постоянной, для малых значений приложенной силы ее величина больше, что позволяет более точно измерять слабые силы до ~ 1 Н. После снятия нагрузки датчик восстанавливает начальную емкость с разбросом менее 1%.
Для снятия сигнала с датчика использовалась электрическая цепь на основе емкостного делителя напряжения, образованного датчиком и опорным конденсатором. На делитель подавался импульс напряжения, сформированный на цифровом выходе контроллера. При этом измерялась величина напряжения на опорном конденсаторе, подключенном к высокоомному аналоговому входу микроконтроллера. Подбирая емкость опорного конденсатора можно оптимизировать цепь для работы в диапазоне выходных значений датчика. Измеренная и оцифрованная АЦП величина напряжения может быть пересчитана в емкость датчика или может быть проведена прямая калибровка отчетов АЦП в зависимости от приложенной нагрузки. Величина опорной емкости составляла 527 пФ, начальная емкость ненагруженного датчика составляла около 135 пФ.
На Фиг. 7 приведена зависимость измеренной емкости датчика, установленного на зонд-манипулятор, от времени в случае упора зонда-манипулятора в неподвижный предмет с постоянным (предельным) усилием. В начальный момент, когда сила нажима увеличивается, величина емкости также растет, достигая предельного значения ~ 240 пФ.
На Фиг. 8 приведены зависимости измеренной емкости датчика, установленного на зонд-манипулятор, от времени в случае толкания зондом-манипулятором сдвигаемого предмета с постоянным усилием (А, Б - более тяжелый и более легкий предметы, соответственно). Аналогично случаю недвижимого предмета, в начальный момент, когда сила нажима увеличивается, емкость возрастает, достигая значения меньшего, нежели в случае неподвижного предмета. Кроме того, при движении предмета возникают колебания силы нажатия, что приводит к появлению колебаний сигнала, существенно превышающих шумы. Подобное может наблюдаться и при касании, когда сила нажатия увеличивается (Фиг. 8А). Для более легкого предмета (Фиг. 8Б) установившееся стационарное значение емкости меньше предельного, что объясняется большим усилием для начального сдвига предмета из состояния покоя.
На Фиг. 9 приведены зависимости измеренной емкости датчика, установленного на зонд-манипулятор, от времени в случае толкания зондом-манипулятором с постоянным усилием и последующим опрокидыванием предмета (Фиг. 9А - более легкий предмет, Фиг. 9Б - более массивный). Кривые содержат «плато», которое соответствует постоянной силе нажатия на уже наклоняющийся, но стремящийся вернуться в исходное положение, предмет. При опрокидывании предмета величина емкости уменьшается до исходного значения, соответствующему ненагруженному состоянию.
В случае крайне легких предметов (например, лист бумаги) сигнал остается близким к нулю. Как видно, кривые отличаются друг от друга, что позволяет различать данные события. В целом, характер кривых идентичен случаю использования FSR датчика. Решение задач различия взаимодействия с объектами также может быть проведено с помощью машинного обучения.
Библиография
1. Патент РФ №2705049 «Устройство управления высокоадаптивным автономным мобильным роботом», дата публикации 01.11.2019, заявка: 2019103170, 05.02.2019.
2. Патент РФ №2591912 «Модуль обнаружения препятствий и робот-уборщик, включающий в себя таковой», дата публикации 20.07.2016, заявка: 2014153133/02, 07.06.2013.
3. Патент РФ №2709523, «Система определения препятствий движению робота», дата публикации 18.12.2019, заявка: 2019104608, 19.02.2019.
4. Патент РФ №135957, «Робот-манипулятор», дата публикации 27.12.2013, заявка: 2013124984/02, 30.05.201.
5. Патент РФ №2518806, «Роботизированная хирургическая система минимального инвазивного вмешательства и способ ее управления», дата публикации 10.06.2014, заявка: 2012122482/02, 31.05.2012.
6. Патент РФ №2462342, «Оценка усилия для роботизированной хирургической системы минимального инвазивного вмешательства», дата публикации 27.09.2012, заявка: 2009119356/02, 25.10.2007.
7. Патент РФ №2116608, «Мобильный носитель поискового оборудования и способ управления им», дата публикации 27.07.1998, заявка: 97116031/02, 29.09.1997.
8. Патент РФ №2103860, «Автономная газонокосилка», дата публикации 10.02.1998, заявка: 93005091/13, 23.09.1991.
9. Патент РФ №151487, «Манипулятор антропоморфного робота», дата публикации 10.04.2015, заявка: 2012146299/02, 30.10.2012.
10. Yaniger S. I. Force sensing resistors: A review of the technology //Electro International, 1991. - IEEE, 1991. - C. 666-668.
11. Патент РФ №2483283 «Емкостный датчик деформации», дата публикации 09.11.2021, заявка: 2020140559, 08.12.2020.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ ДЛЯ ПОИСКА И МАРКИРОВКИ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 2024 |
|
RU2822025C1 |
| Образовательно-исследовательский комплекс робот малый антропоморфный | 2019 |
|
RU2718513C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| Мобильный робототехнический комплекс | 2015 |
|
RU2612115C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
Изобретение относится к области робототехники, измерительной техники, машиностроению, мобильным робототехническим комплексам. Технический результат заключается в обеспечении анализа возможности перемещения (сдвига, опрокидывания и пр.) препятствий (предметов) на пути следования автономного робототехнического комплекса неразрушающим контактным способом. Устройство содержит зонд-манипулятор цилиндрической формы, на торцевой и боковой поверхностях которого закреплены датчики нормальной составляющей силы, причем к датчикам подведены выводы, подключенные к измерительному интерфейсу системы автоматического управления. Анализ возможности устранения препятствия производится на основе измерительной информации, полученной с датчиков, обеспечивающих преобразование во времени величины нормальной силы, действующей на датчик при толкании зондом препятствия с постоянным усилием, в электрический сигнал, по характеру изменения во времени которого определяется характер взаимодействия с препятствием. 9 ил.
Устройство для анализа возможности неразрушающего перемещения или преодоления препятствий робототехническим комплексом, имеющее датчики силы, отличающееся тем, что содержит зонд-манипулятор в виде стержня, один конец которого выполнен с возможностью установки на робототехнический комплекс, причем на торцевой поверхности закреплен по крайней мере один датчик нормальной составляющей силы и на боковой поверхности закреплен по крайней мере один датчик нормальной составляющей силы, снабженные мягкими накладками и обеспечивающие преобразование во времени величины нормальной силы, действующей на датчик при толкании зондом препятствия с постоянным усилием, в электрический сигнал, при этом к датчикам подведены выводы, подключенные к измерительному интерфейсу системы автоматического управления комплексом, обеспечивающей анализ и определение характера взаимодействия с препятствием по характеру изменения во времени данного сигнала.
| ОЦЕНКА УСИЛИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2462342C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫСОКОАДАПТИВНЫМ АВТОНОМНЫМ МОБИЛЬНЫМ РОБОТОМ | 2019 |
|
RU2705049C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ ПОГРУЗОЧНО-ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2703086C2 |
| МОДУЛЬ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ И РОБОТ-УБОРЩИК, ВКЛЮЧАЮЩИЙ В СЕБЯ ТАКОВОЙ | 2013 |
|
RU2591912C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

