Предлагаемое изобретение относится к области двигателестроения и может найти применение при стендовых испытаниях и в эксплуатации газотурбинных двигателей, а также для создания систем диагностики.
Осевая сила воспринимается радиально-упорным подшипником ротора и передается через силовые элементы опоры на корпусные детали двигателя. Величина осевой силы, характер ее изменения от запуска до максимального режима работы двигателя является важным параметром, влияющим на работоспособность подшипника и двигателя в целом. Наиболее опасными для него являются режимы работы, на которых осевая сила, действующая на радиально-упорный подшипник, принимает минимальные значения.
Известны расчетные методики определения осевой силы, но из-за невозможности учета всех важных влияющих факторов они имеют недопустимо высокие для практики погрешности и могут дать лишь качественную оценку (Скубачевский Г.С. Авиационные газотурбинные двигатели. Конструкция и расчет деталей. М.: Машиностроение, 1981. - С. 38-47).
В настоящее время наиболее достоверным и широко используемым является способ прямого измерения осевой силы путем статического тензометрирования, включающий определение минимальных и максимального значений осевой силы при работе двигателя.
Наиболее близким является способ определения режимов работы газотурбинного двигателя, на которых осевая сила, действующая на радиально-упорный подшипник, принимает минимальные и максимальное значения, при котором измеряют сигналы с датчиков, установленных вблизи радиально-упорного подшипника, определяют режимы работы двигателя, соответствующие минимальным и максимальному значениям осевой силы (Иноземцев А.А., Сандрацкий В.Л. Газотурбинные двигатели. Пермь, ОАО «Авиадвигатель», 2006, С. 166-169 п. 4.1.1.6 - Осевая сила).
В известном способе измеряют статические сигналы с тензодатчиков, установленных на тензометрических кольцах, установка которых требует доработки опоры и подшипника (изменение их конструкции). Это снижает надежность доработанной опоры (на ограниченное число пусков) и неприемлемо для условий эксплуатации, кроме того увеличиваются затраты на реализацию способа.
Техническим результатом, на достижение которого направлен предлагаемый способ, является повышение надежности работы подшипника и двигателя в целом, снижение трудоемкости и затрат на реализацию способа за счет сохранения неизменной материальной части (не требуется внесения конструктивных изменений в опору), расширение области его использования, включая эксплуатацию двигателей.
Технический результат достигается тем, что в способе определения режимов работы газотурбинного двигателя, на которых осевая сила, действующая на радиально-упорный подшипник, принимает минимальные и максимальное значения, при котором измеряют сигналы с датчиков, установленных вблизи радиально-упорного подшипника, определяют режимы работы двигателя, соответствующие минимальным и максимальному значениям осевой силы, в отличие от известного предварительно определяют частоту вращения сепаратора подшипника, измеряют динамические сигналы с датчиков вибрации, установленных в осевом и вертикальном направлениях, преобразуют их в амплитудно-частотные спектры осевой и радиальной вибрации, строят график изменения амплитуды осевой вибрации с частотой вращения ротора от времени, исключают из рассмотрения участки графика, на которых повышение амплитуды осевой вибрации вызвано отсутствием влияния осевой силы, определяют максимальную амплитуду осевой вибрации, которая соответствует максимальному значению осевой силы, действующей на радиально-упорный подшипник, и определяют соответствующий ей режим работы двигателя, выбирают участки графика, на которых происходит снижение осевой вибрации, при этом в спектре радиальной вибрации при наборе и снижении частоты вращения ротора выполняют поиск дискретной составляющей на предварительно определенной частоте вращения сепаратора подшипника, наличие которой соответствует минимальному значению осевой силы, действующей на радиально-упорный подшипник, и определяют соответствующие ей режимы работы двигателя.
Повышение амплитуды осевой вибрации может быть вызвано несоосностью ротора в опорах.
При несоосности ротора в опорах в спектре осевой вибрации появляется составляющая на удвоенной частоте вращения ротора, амплитуда которой превышает амплитуду составляющей на частоте вращения ротора.
Режимы работы, соответствующие появлению составляющей на частоте вращения сепаратора радиально-упорного подшипника, могут быть определены по частоте вращения ротора в спектре радиальной вибрации или по тахограмме.
Датчики вибрации могут быть установлены на опору с радиально-упорным подшипником или на силовой корпус в плоскости опоры.
Способ поясняется чертежами, на которых изображены:
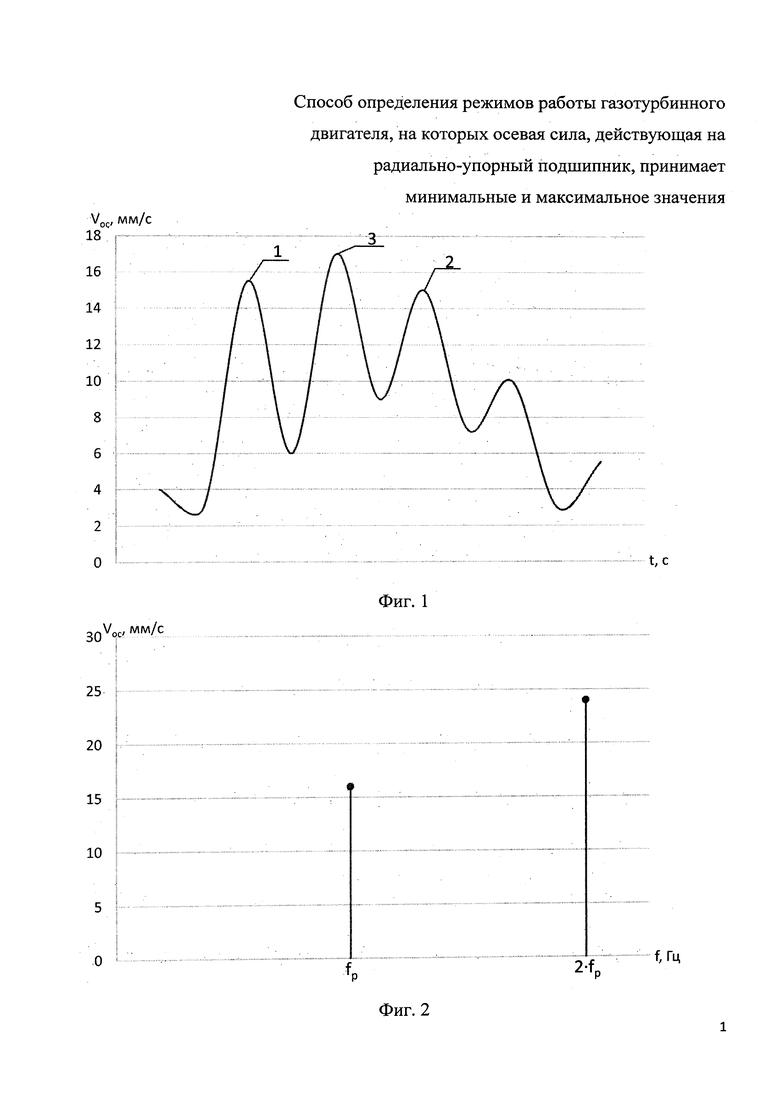
фиг. 1 - исходный график изменения амплитуды осевой вибрации с частотой вращения ротора от времени;
фиг. 2 - спектр осевой вибрации при наличии несоосности (перекоса) ротора в опорах;
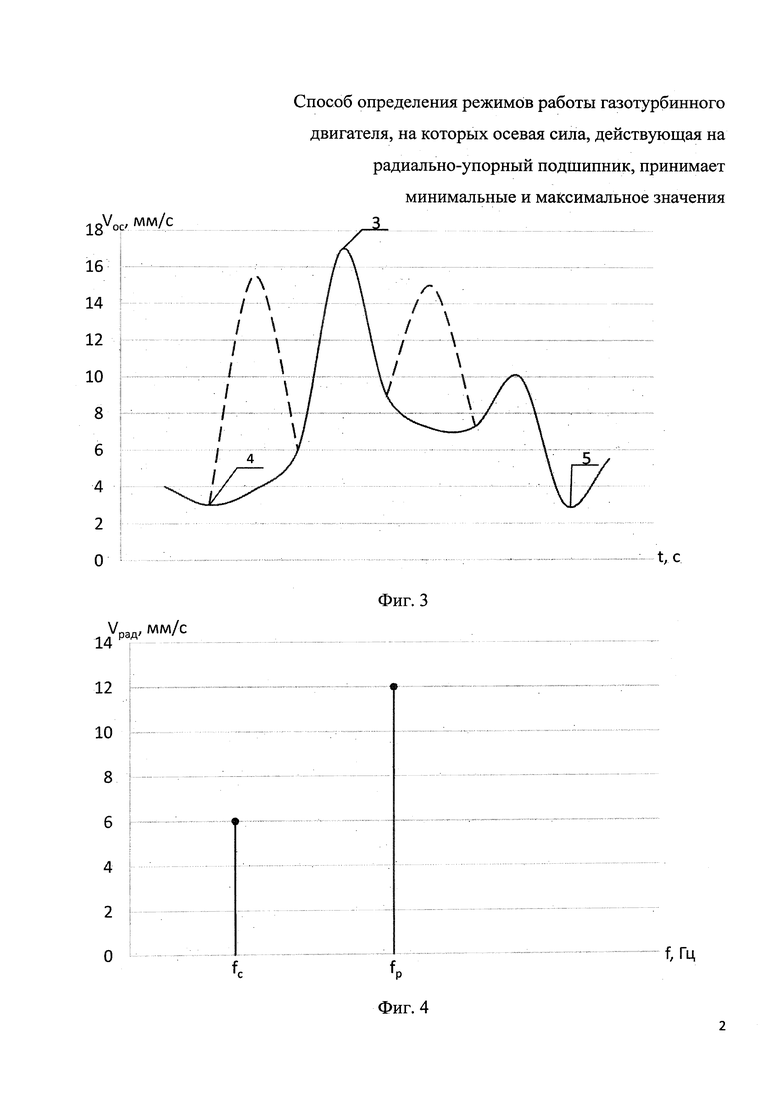
фиг. 3 - скорректированный график изменения амплитуды осевой вибрации с частотой вращения ротора от времени;
фиг. 4 - спектр радиальной вибрации при минимальном значении осевой силы, действующей на радиально-упорный подшипник.
Способ осуществляют следующим образом.
Предварительно определяют частоту вращения сепаратора  радиально-упорного подшипника, связанную с частотой вращения ротора (Генкин М.Д., Соколова А.Г. Виброакустическая диагностика машин и механизмов. М.: Машиностроение, 1987. С. 248).
радиально-упорного подшипника, связанную с частотой вращения ротора (Генкин М.Д., Соколова А.Г. Виброакустическая диагностика машин и механизмов. М.: Машиностроение, 1987. С. 248).
На опору ротора двигателя без ее доработки вблизи радиально-упорного подшипника устанавливают датчики вибрации (вибропреобразователи): в осевом (вдоль оси двигателя) и радиальном (вертикальном) направлениях, с которых регистрируют динамические сигналы. При отсутствии возможности установки датчиков вибрации непосредственно на опору допускается их установка на силовой корпус вблизи подшипника в плоскости опоры, что снижает затраты на реализацию способа при уменьшении уровня полезного сигнала на фоне шумов.
Измеряют динамические сигналы с датчиков вибрации и преобразуют их в амплитудно-частотные спектры осевой и радиальной вибрации.
По результатам спектрального анализа строят график изменения амплитуды осевой вибрации с частотой вращения ротора от времени (фиг. 1). На графике находят участки 1, 2 и 3, на которых наблюдается повышение (появление пиков) амплитуды осевой вибрации. Исключают из рассмотрения участки 1 и 2, на которых повышение амплитуды осевой вибрации вызвано отсутствием влияния осевой силы, т.е. происходит не по причине изменения осевой силы (осевая вибрация изменяется непропорционально изменению осевой силы), а, например, из-за несоосности (перекоса) ротора в опорах, механического люфта и т.п. (Генкин М.Д., Соколова А.Г. Виброакустическая диагностика машин и механизмов. М.: Машиностроение, 1987. С. 72).
Повышение амплитуды осевой вибрации при наличии несоосности ротора в опорах соответствует появлению в спектре осевой вибрации (фиг. 2) составляющей на удвоенной частоте вращения ротора, амплитуда которой превышает амплитуду составляющей на частоте вращения ротора. Доминирование составляющей на удвоенной частоте вращения ротора по сравнению с составляющей на частоте вращения ротора (в моменты, соответствующие участкам 1 и 2) является диагностическим признаком несоосности (перекоса) ротора в опорах.
По графику с исключенными из рассмотрения участками 1 и 2 (фиг. 3) определяют максимальную амплитуду (участок 3) осевой вибрации с частотой вращения ротора, которая соответствует максимальному значению осевой силы, действующей на радиально-упорный подшипник. Определяют режим работы двигателя, соответствующий максимальному значению осевой силы.
Принимают, что значения осевой вибрации, приведенные на скорректированном графике фиг. 3 (из которого исключили участки, которые уровни вибрации зависят не от осевой силы), пропорциональны значениям осевой силы, действующей на радиально-упорный подшипник. Это используют для оценки по уровню осевой вибрации относительного изменения значения осевой силы при последующей работе двигателя.
На графике фиг. 3 выбирают участки 4 и 5, на которых наблюдается снижение (появление впадин) осевой вибрации с частотой вращения ротора. Один из этих участков (4) наблюдается при наборе частоты вращения ротора, а второй (5) - при ее снижении.
При наборе и снижении частоты вращения ротора в мгновенном спектре радиальной вибрации (фиг. 4) в моменты появления впадин выполняют поиск дискретной составляющей на предварительно определенной частоте вращения сепаратора подшипника. Появление этой составляющей соответствует минимальному значению осевой силы, действующей на радиально-упорный подшипник.
Определяют режимы работы двигателя, соответствующие минимальным значениям осевой силы, действующей на радиально-упорный подшипник, которые могут быть определены по спектру вибрации или тахограмме.
С целью предотвращения повреждения двигателя, найденные режимы его работы, соответствующие минимальным значениям осевой силы, делают переходными без стабилизации и измерения на них контрольных точек.
Способ был реализован при стендовых испытаниях газотурбинного двигателя, который был препарирован датчиками вибрации МВ-44, установленными на корпусе двигателя в плоскости опоры в осевом и вертикальном направлениях.
Предварительно определили частоту вращения сепаратора  радиально-упорного подшипника по формуле:
радиально-упорного подшипника по формуле:
где  - частота вращения ротора, Гц;
- частота вращения ротора, Гц;
d - диаметр тела качения, мм;
D0 - диаметр окружностей центров тел качения, мм;
ϕ - угол контакта шариков по беговой дорожке, град.
По результатам расчета частота вращения сепаратора подшипника составила по отношению к частоте вращения ротора:  .
.
Измеряемые с датчиков вибрации сигналы преобразовывали в амплитудно-частотные спектры осевой и радиальной вибрации.
Построили график изменения амплитуды осевой вибрации Voc с частотой вращения ротора от времени t (фиг. 1). На графике выбрали участки 1 и 2, на которых наблюдалось повышение амплитуды осевой вибрации (пики), вызванное несоосностью ротора в опорах, что подтверждалось наличием в спектре осевой вибрации Voc (фиг. 2) составляющей на удвоенной частоте вращения ротора  , амплитуда которой превышала амплитуду составляющей на частоте вращения ротора
, амплитуда которой превышала амплитуду составляющей на частоте вращения ротора  . Участки 1 и 2 графика исключили из рассмотрения, поскольку на них осевая вибрация была вызвана не осевой силой, а несоосностью ротора в опорах при проходе опорной критической частоты вращения ротора 210 Гц (12600 об/мин).
. Участки 1 и 2 графика исключили из рассмотрения, поскольку на них осевая вибрация была вызвана не осевой силой, а несоосностью ротора в опорах при проходе опорной критической частоты вращения ротора 210 Гц (12600 об/мин).
По фиг. 3 нашли максимальную (пик) 3 амплитуду осевой вибрации 17 мм/с на частоте вращения ротора 310 Гц, которая соответствовала максимальному значению осевой силы, действующей на радиально-упорный подшипник, и определили соответствующий ей режим работы двигателя 18600 об/мин. Полученные результаты использовали в ходе последующих испытаний для оценки по уровню осевой вибрации относительного изменения значений осевой силы.
По графику фиг. 3 выбрали участки, на которых наблюдалось снижение (впадины) амплитуды осевой вибрации: 4 - при наборе частоты вращения ротора и 5 - при ее снижении. При этом в спектре радиальной вибрации Vрад (фиг. 4) при наборе частоты вращения была зафиксирована составляющая на частоте вращения сепаратора подшипника  , которой соответствовала частота вращения ротора
, которой соответствовала частота вращения ротора  , а при снижении частоты вращения ротора эта составляющая была зафиксирована на частоте вращения сепаратора подшипника
, а при снижении частоты вращения ротора эта составляющая была зафиксирована на частоте вращения сепаратора подшипника  , которой соответствовала частота вращения ротора
, которой соответствовала частота вращения ротора  . По спектру вибрации на частоте роторной составляющей
. По спектру вибрации на частоте роторной составляющей  определили режимы работы двигателя, соответствующие минимальным значениям осевой силы: при наборе частоты вращения - 9900 об/мин, при ее снижении - 11315 об/мин. Их сделали переходными без стабилизации и измерения на них контрольных точек, что позволило снизить риск повреждения деталей газотурбинного двигателя.
определили режимы работы двигателя, соответствующие минимальным значениям осевой силы: при наборе частоты вращения - 9900 об/мин, при ее снижении - 11315 об/мин. Их сделали переходными без стабилизации и измерения на них контрольных точек, что позволило снизить риск повреждения деталей газотурбинного двигателя.
Способ позволяет определить опасные режимы работы газотурбинного двигателя, соответствующие минимальным значениям осевой силы, действующей на радиально-упорный шарикоподшипник, без внесения изменений в конструкцию опоры, что повышает надежность работы двигателя в целом без увеличения затрат на реализацию способа и расширяет область его использования. Кроме того, способ позволяет по максимальному уровню осевой вибрации оценить относительное изменение значений осевой силы в ходе дальнейшей работы двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЖИМОВ РАБОТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ, СООТВЕТСТВУЮЩИХ МИНИМАЛЬНЫМ ЗНАЧЕНИЯМ ОСЕВОЙ СИЛЫ, ДЕЙСТВУЮЩЕЙ НА РАДИАЛЬНО-УПОРНЫЙ ПОДШИПНИК | 2016 |
|
RU2624089C1 |
| Способ вибрационной диагностики подшипниковых опор в составе газотурбинных двигателей с применением технического микрофона | 2015 |
|
RU2613047C1 |
| Способ определения осевого усилия предварительного натяга подшипников быстровращающегося двигателя | 1981 |
|
SU1016710A1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕЖРОТОРНОГО ПОДШИПНИКА ДВУХВАЛЬНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2478923C2 |
| Способ диагностики технического состояния газотурбинного двигателя | 2023 |
|
RU2812379C1 |
| Многосегментный радиальный подшипник скольжения | 2016 |
|
RU2614463C1 |
| Способ вибрационной диагностики подшипниковых опор в составе газотурбинных двигателей по изменению размаха амплитуды роторных частот | 2015 |
|
RU2614908C1 |
| Способ повышения эффективности диагностирования предпомпажного состояния компрессора газотурбинного двигателя | 2022 |
|
RU2790899C1 |
| ОПОРА РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2414612C1 |
| Способ контроля вязких жидкостей | 1987 |
|
SU1404899A1 |
Изобретение относится к области двигателестроения и может найти применение при стендовых испытаниях и в эксплуатации газотурбинных двигателей, а также для создания систем диагностики. Техническим результатом, на достижение которого направлен предлагаемый способ, является повышение надежности работы подшипника и двигателя в целом, снижение трудоемкости и затрат на реализацию способа за счет сохранения неизменной материальной части (не требуется внесения конструктивных изменений в опору), расширение области его использования, включая эксплуатацию двигателей. Предварительно определяют частоту вращения сепаратора подшипника, измеряют динамические сигналы с датчиков вибрации, установленных в осевом и вертикальном направлениях, преобразуют их в амплитудно-частотные спектры осевой и радиальной вибрации, строят график изменения амплитуды осевой вибрации с частотой вращения ротора от времени, исключают из рассмотрения участки графика, на которых повышение амплитуды осевой вибрации вызвано отсутствием влияния осевой силы, определяют максимальную амплитуду осевой вибрации, которая соответствует максимальному значению осевой силы, действующей на радиально-упорный подшипник, и определяют соответствующий ей режим работы двигателя, выбирают участки графика, на которых происходит снижение осевой вибрации, при этом в спектре радиальной вибрации при наборе и снижении частоты вращения ротора выполняют поиск дискретной составляющей на предварительно определенной частоте вращения сепаратора подшипника, наличие которой соответствует минимальному значению осевой силы, действующей на радиально-упорный подшипник, и определяют соответствующие ей режимы работы двигателя. 4 з.п. ф-лы, 4 ил.
1. Способ определения режимов работы газотурбинного двигателя, на которых осевая сила, действующая на радиально-упорный подшипник, принимает минимальные и максимальное значения, при котором измеряют сигналы с датчиков, установленных вблизи радиально-упорного подшипника, определяют режимы работы двигателя, соответствующие минимальным и максимальному значениям осевой силы, отличающийся тем, что предварительно определяют частоту вращения сепаратора подшипника, измеряют динамические сигналы с датчиков вибрации, установленных в осевом и вертикальном направлениях, преобразуют их в амплитудно-частотные спектры осевой и радиальной вибрации, строят график изменения амплитуды осевой вибрации с частотой вращения ротора от времени, исключают из рассмотрения участки графика, на которых повышение амплитуды осевой вибрации вызвано отсутствием влияния осевой силы, определяют максимальную амплитуду осевой вибрации, которая соответствует максимальному значению осевой силы, действующей на радиально-упорный подшипник, и определяют соответствующий ей режим работы двигателя, выбирают участки графика, на которых происходит снижение осевой вибрации, при этом в спектре радиальной вибрации при наборе и снижении частоты вращения ротора выполняют поиск дискретной составляющей на предварительно определенной частоте вращения сепаратора подшипника, наличие которой соответствует минимальному значению осевой силы, действующей на радиально-упорный подшипник, и определяют соответствующие ей режимы работы двигателя.
2. Способ по п. 1, отличающийся тем, что повышение амплитуды осевой вибрации вызвано несоосностью ротора в опорах.
3. Способ по п. 2, отличающийся тем, что при несоосности ротора в опорах в спектре осевой вибрации появляется составляющая на удвоенной частоте вращения ротора, амплитуда которой превышает амплитуду составляющей на частоте вращения ротора.
4. Способ по п. 1, отличающийся тем, что режимы работы, соответствующие появлению составляющей на частоте вращения сепаратора радиально-упорного подшипника, определяют по частоте вращения ротора в спектре радиальной вибрации или по тахограмме.
5. Способ по п. 1, отличающийся тем, что датчики вибрации устанавливают на опору с радиально-упорным подшипником или на силовой корпус в плоскости опоры.
| Иноземцев А.А | |||
| и др | |||
| Газотурбинные двигатли | |||
| Пермь, ОАО"АВИАДВИГАТЕЛЬ", 2006, с | |||
| Рельсовый башмак | 1921 |
|
SU166A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ ВИБРАЦИОННОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДШИПНИКОВОЙ ОПОРЫ РОТОРА ДВУХВАЛЬНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2551447C1 |
| СПОСОБ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДШИПНИКОВ В СОСТАВЕ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2575243C1 |
| СПОСОБ ВИБРОДИАГНОСТИРОВАНИЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ В ЭКСПЛУАТАЦИИ ПО ИНФОРМАЦИИ БОРТОВЫХ УСТРОЙСТВ РЕГИСТРАЦИИ | 2014 |
|
RU2556477C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОСЕВЫХ СИЛ НА РАДИАЛЬНО-УПОРНОМ ПОДШИПНИКЕ РОТОРА ТУРБОМАШИНЫ | 2011 |
|
RU2474710C1 |
| US 5735666 A1, 07.04.1998 | |||
| Замок для соединения смежных щитов разборно-переставной мелкощитовой опалубки | 1986 |
|
SU1444491A1 |

