Од
Изобретение относится к измерительной технике и может быть использована в гироскопическом приборостроении.
Известны способы определения осевой нагрузки на радиально-упорный шарикоподшипник, основанные на измерении параметров шарикоподшипника, ;за8исяи1их от величины ос.евой нагрузки, и на ождении последней по предварительно полученному закону , зависимости этой нагрузки от упомянутых параметров шарикоподшипника.
Известен способ определения осево нагрузки, закш)чающийся в измерении таких кинематических параметров подшипника, как частоты вращения сепаратора и кольца, определении этих частот и нахождении по ней осевой на грузки на подшипник Сll. Недостатком данного способа является то, что в нем предусматривают установку одного или двух датчиков нпосредственно в подшипниковом узле, что допустимо только в исследовательских целях. В производственных условиях и при работе с малогабаритными подшипниками применение указанного способа ограничено.
Наиболее близок к предлагаемому способ определения осевого усилия предварительного натяга подшипников быстровращающегося двигателя, заключающийся в том, что исследуемый дви-гатель подвергают вибрациям в осевом направлении, определяют инерционную силу и с помощью предварительно -получен ной зависимости измеряемого параметра от инерционной силы определяют осевое усилие предварительного натяга подшипников двигателя .
Однако точность известного способ является невысокой .-ввиду того, что для определения осевой нагрузки используется параметр, не влияющий непосредственно на ее величину, а именно из спектра вибраций вращающегося двигателя выделяют частоту гармонической составляющей от изменения контактного угла подшипника. Но величина этого угла зависит не только от осевой нагрузки на подшипник, но и от толщины масляной пленки, приработки, степени износа подшипника. По известному способу при определеНИИ осевой нагрузки на подшипник бывшего в употреблении ротора или после его приработки изделие обычно демонтируют.
Цель изобретения - обеспечение возможности определения усилия в реальных условиях.
Поставленная цель достигается тем, что согласно способу определения осевого усиЛия предварительного натяга подшипников быстровращающегося двигателя, который заключается в том, что исследуемый двигатель подвергают
0 вибрациям в осевом направлении, определяют инерционную силу и с помощью предварительно полученное зависимости измеряемого параметра от инерционной силы определяют осевое усилие предварительного натяга подшипников двигателя, после вибрации двигателя определяют амплитудное значение инерционных сил ротора при разных амплитудных вибрациях, измеряют деформации от этих сил нелинейной пружины,
создающей осевой предварительный натяг подшипников, определяют отношение амплитуды инерционной силы ротора к амплитуде деформации пружины и жесткость пружины при нулевом значении инерционной силы, по которой, пользуясь предварительно полученной зависимостью осевого усилия от смещения пружины и производной этой завиQ симости по деформации, определяют осевое усилие предварительного натяга подшипников двигателя.
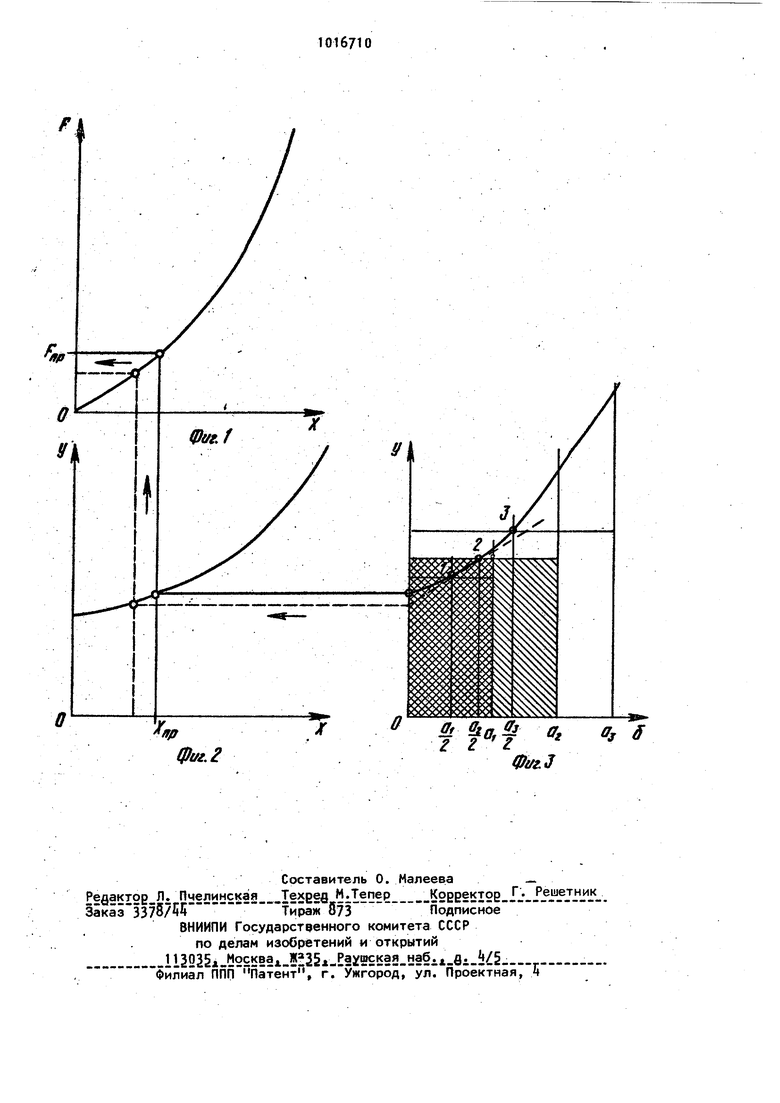
На фиг. 1 дана характеристика Fy,. создающая осевой натяг подшипников нелинейной пружины, в виде упругой крышки подшипникового узла (Fnp усилие предварительного натяга); на Лиг. 2 - производная харакдеристики
-ЗГ;
(iCj по деформации у (к) §7
на фиг. 3 зависимость .yCtfj ; где сГ половина амплитуды а переменной со ставля1ощей деформации пружины сГ
X - Т ХЛР
где Хр - предварительная деф.ормация пружинъ.
Предложенный способ включает следующие операции: вибрацию исследуемого двигателя в осевом направлении, определение амплитудного значения инерционных сил ротора при разных амплитудных вибрациях, измерение деформации от этих сил нелинейной пружины, создающей предварительный натяг подшипников, определение отношения амплитуды инерционной силы ротора к амплитуде деформации пружины, жесткости пружины при нулевом значении инерционной силы, а также осевого усилия предварительного натяга подшипников двигателя, используя 3 J варительно полученную зависимость осевого усилия от смещения пружины и производную этой зависимости по деформации. Пример. Определяют осевое усилие предварительного натяга шарик подшипников малогабаритного гиродвигателя с массой ротора w 0,028 кг. Перед сборкой гиродвигателя снимают упругую характеристику F (х) крышки его подшипникового узла путем нагружения ее в осевом направлении усилие до 2 кг и измерения деформации в пре делах 0-0, 015 мм. Характеристика является жесткой, когда по мере увелич ния деформации жесткость увеличивает ся Затем путем графического диффере цирования получают производную этой характеристики- по деформации y(xj, причем масштаб обоих графиков по оси X - одинаков. I Собранный гиродвигатель устанавли .вают в вертикальном положении на вибростенд ВЭД-10 и подвергают вибт рации на частоте 300 Гц с амплиту-; дои А 0, А. 0,07; А 0,10 мм. При этом амплитудные значения инерционной силы ротора F 0,Q6;F« 0,711; pQ 1,015 кг. Одновременно при помощи бесконтактного емкостного датчика и прибора ИВЕ-1р измеряют амплитуду вызванной инерционной силой ротора деформации крышки подшипникового узла: а 0,0037; а 0,0063; 0,0085 м Определяют усредненные значения жесткости крышки в интервалах изменения ее деформации от постоянного значения, обусловленного предвари- тельным натягок, для каждого амплитудного значения а , а а « как отношение амплитуд инерционной силы и деформации, кг/мки: рР ч,- 0 5 0,1097 -1 y-i ТТ 0,1128; у ,,дЦ т о , р Введение понятия средней mectKOCTM в некотором интервале изменения деформации равносильно замене соответствующего участка нелинейной упругой характеристики отрезком прямой, угловой коэффициент которой равен этому усредненному значению жесткости. Истинная упругая характеристика имеет касательную с таким же угловым коэффициентом в точке, лежащей в непосредственной близости от середины интервала изменения деформации, поэтому абсциссы точек 1, 2 и 3 на графике /(с) с ординатами у- , Уз приняты равными соответственно , а,/2 и аз/2. Через точки 1, 2 и 3 проводят . СПЛОШНУ10 линию с целью определения жесткости пружины при -нулевом значении инерционной силы у р путем экстраполяции графика y(cf} ДО пересечения его с осью У. Полученную величину проектируют на кривую у(х), а затем на кривую РЫ) и на ось F . В результа- те определяют, что усилие предварительного натяга Рпр nJjS кг. Таким образом, предлагаемый способ позволяет о реальных условиях ра-. боты двигателя..независимо от того, насколько изменился предварительный натяг после момента сборки в результате приработки, износа, изменения температуры и т.д., определять усилия предварительного натяга подшипйиков быстровращающегося двигателя с высокой точностью. фиг. г Ot &п г г ffj ff г Фl/tЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВАРИТЕЛЬНОГО ОСЕВОГО НАТЯГА ПОДШИПНИКОВЫХ ОПОР РОТОРА | 2014 |
|
RU2583337C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЫСОКОСКОРОСТНЫМ МОТОР-ШПИНДЕЛЕМ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 2012 |
|
RU2509627C1 |
| СПОСОБ ДИНАМИЧЕСКОГО МОНИТОРИНГА ВЫСОКОМОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745382C1 |
| Способ сборки подшипниковой опоры с предварительным натягом | 1985 |
|
SU1247710A1 |
| Устройство для контроля качества сборки роторов с подшипниками качения | 1980 |
|
SU966522A1 |
| Электромеханическое устройство с повышенным кинетическим моментом ротора-маховика (варианты) | 2022 |
|
RU2796643C1 |
| Устройство для намотки волокна | 1983 |
|
SU1121246A1 |
| Способ определения предварительного осевого натяга шарикоподшипников гиродвигателя | 1979 |
|
SU777430A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПАРАМЕТРИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2020 |
|
RU2748870C1 |
| Способ приработки радиально-упорных подшипников в дуплексе | 1989 |
|
SU1663256A1 |
СПОСОБ ОПРЕДЕЛЕНИЯ ОСЕВОГО УСИЛИЯ ПРЕДВАРИТЕЛЬНОГОНАТЯГА ПОДИИПНИКОВ БЫСТРОВРАЩАЩЕГОСЯ ДВИГА- ТЕЛЯ, заключающийся в том, что исследуемый двигатель подвергают вибрациям в осевом направлении, определяют инерционную силу и с помощью . предварительно полученной зависимоети измеряемого параметра от инерционной силы определяют осевое услиие предварительного натяга Подшипников двигателя, отличающийся тем, что, с целью обеспечения возможности определения усилия в реальных условиях, определяют амплитудное значение инерционных сил ротора при разных амплитудных вибрациях, измеряют деформации от этих сил нелинейной пружины, создающей осе.вой предварительный натяг подшипников, определяют отношение амплитуды инерционной силы ротора к амплитуде деформации пружины и жес;ткость пружины при нуле вом значении инерционной силы, по которой, пользуясь предварительно полученной зависимостью осевого усилия от смещения пружины и производной этой зависимости по деформации,.опре 1еляют осевое усилие предварительного натяга подшипников двигателя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения осевой нагрузки | 1976 |
|
SU567969A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ii | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСЕВОЙ НАГРУЗКИ НА ШАРИКОПОДШИПНИКИ БЫСТРОВРАШАЮШЕГОСЯДВИГАТЕЛЯ | 0 |
|
SU289319A1 |
