Способ опознавания транспортного средства и устройство опознавания транспортных средств относятся к опознаванию транспортных средств и могут использоваться, например, в пунктах учета движения для определения состава транспортного потока. Наиболее целесообразно использование этого изобретения на дорогах, имеющих большое количество проезжих полос.
Известны способ и устройства опознавания транспортного средства (определения типа транспортного средства), в которых тип транспортного средства определяется по весу с помощью тензодатчиков, которые располагают на проезжей полосе дороги. Но такой способ опознавания транспортного средства является очень грубым и не позволяет, например, отличить автобус от грузового автомобиля такого же веса.
Известны способы и устройства опознавания транспортного средства по его изображению или изображению его номера, но это очень сложные и очень дорогие устройства, содержащие фото- или видеокамеры и очень сложное и дорогое устройство обработки и анализа изображений.
Известны способы и устройства опознавания транспортного средства (например, выпускаемый Саратовским научно-производственным центром «РОСДОРТЕХ» Пункт учета движения передвижной ПУДП-1), в которых с одной стороны дороги на другую передают несколько световых лучей и по характеристикам перекрывания этих лучей транспортным средством определяют тип этого транспортного средства. Но такие способы и устройства невозможно использовать даже при средней интенсивности движения на дорогах, состоящих из большого количества проезжих полос (практически невозможно при количестве полос больше 2).
Способов и устройств, близких по технической сущности к заявляемым способу и устройству, не обнаружено.
Целью изобретения является снижение стоимости и сложности устройства опознавания транспортных средств при той же достоверности опознания.
Поставленная цель достигается тем, что получают информацию о расстоянии/расстояниях между по меньшей мере одной точкой поверхности транспортного средства и по меньшей мере одной известной точкой пространства, анализируют по меньшей мере эту информацию и по результатам анализа принимают решение о транспортном средстве. Получать информацию о расстоянии/расстояниях между по меньшей мере одной точкой поверхности транспортного средства и по меньшей мере одной известной точкой пространства, анализировать по меньшей мере эту информацию и по результатам анализа принимать решение о транспортном средстве могут автоматически. Автоматически анализировать по меньшей мере информацию о расстоянии/расстояниях между по меньшей мере одной точкой поверхности транспортного средства и по меньшей мере одной известной точкой пространства и по результатам анализа принимать решение о транспортном средстве могут путем работы компьютера или/и контроллера по соответствующей программе. Точки, о расстоянии между которыми получают информацию, могут быть расположены на линии или вблизи линии, перпендикулярной горизонтальной плоскости. Анализировать информацию о расстоянии/расстояниях между по меньшей мере одной точкой поверхности транспортного средства и по меньшей мере одной известной точкой пространства могут путем того, что с помощью этой информации получают информацию по меньшей мере об одной части профиля транспортного средства и анализируют эту информацию. Недостающую информацию по меньшей мере об одной части профиля транспортного средства могут получать путем аппроксимации. Получать информацию о расстоянии/расстояниях между по меньшей мере одной точкой поверхности транспортного средства и по меньшей мере одной известной точкой пространства могут по меньшей мере в один известный момент времени. Могут получать информацию о скорости движения транспортного средства и использовать эту информацию для определения геометрических параметров транспортного средства и/или для анализа. Для получения информации о скорости движения транспортного средства могут использовать информацию о времени, в течение которого разнесенные на известное расстояние датчики расстояния выдают информацию о расстоянии, меньшем или большем критического, или/и использовать информацию о моментах времени начала или конца выдачи этими датчиками информации о расстоянии, меньшем или большем критического. Для анализа, или/и для синхронизации, или/и для формирования информации о критическом расстоянии могут использовать информацию о расстоянии/расстояниях между по меньшей мере одной известной точкой пространства и дорогой. Получать информацию о расстоянии/расстояниях между по меньшей мере одной точкой поверхности транспортного средства и по меньшей мере одной известной точкой пространства могут путем того, что измеряют высоту/высоты по меньшей мере одной известной точки пространства над поверхностью транспортного средства по меньшей мере в один известный момент времени. Устройство опознавания транспортных средств содержит по меньшей мере один датчик расстояния, выход которого соединен с соответствующим входом аналитического устройства, выход которого является выходом устройства. По меньшей мере один датчик расстояния может быть расположен выше транспортных средств. По меньшей мере один датчик расстояния может являться датчиком расстояния между точками, расположенными на линии или вблизи линии, перпендикулярной горизонтальной плоскости. По меньшей мере один датчик расстояния может являться датчиком высоты. Аналитическое устройство может содержать в своем составе по меньшей мере одно устройство обработки сигналов или/и по меньшей мере один аналого-цифровой преобразователь. В качестве или в составе аналитического устройства может быть применен по меньшей мере один контроллер или/и по меньшей мере один компьютер. По меньшей мере один датчик расстояния может являться оптическим или ультразвуковым. По меньшей мере над одной проезжей полосой дороги может быть расположен/расположены по меньшей мере один датчик расстояния. Над каждой проезжей полосой дороги может быть расположен/расположены по меньшей мере один датчик расстояния. С целью получения информации о скорости движения или/и другой информации по меньшей мере над одной проезжей полосой дороги может быть расположено два датчика расстояния. По меньшей мере один датчик расстояния может быть расположен над обочиной/обочинами дороги. По меньшей мере один датчик расстояния может быть расположен над обочиной/обочинами дороги на высоте, большей высоты транспортных средств. С целью снижения стоимости устройства каждый второй датчик расстояния, расположенный над той же проезжей полосой дороги, что и первый, или расположенный над обочиной дороги, может быть хуже по точности и дешевле первого.
Краткое описание чертежей
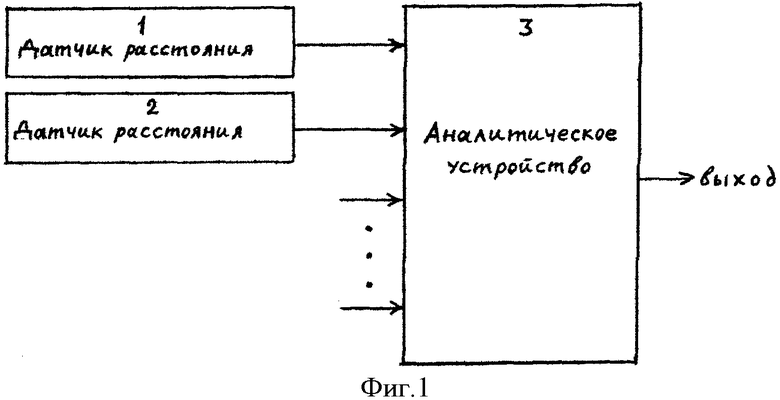
Фиг.1 - пример подключения датчиков расстояния 1 и 2, расположенных над одной проезжей полосой дороги.
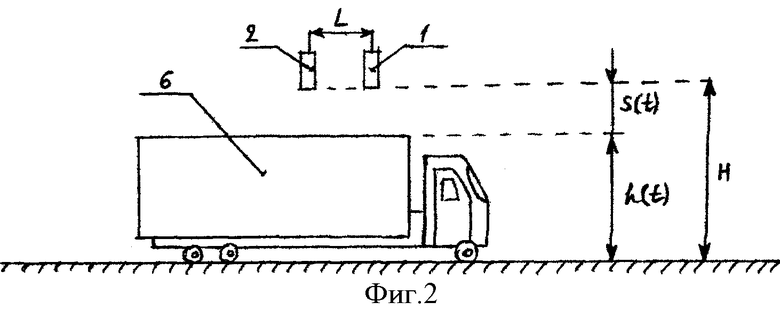
Фиг.2 - пример расположения датчиков расстояния 1 и 2 над одной проезжей полосой дороги.
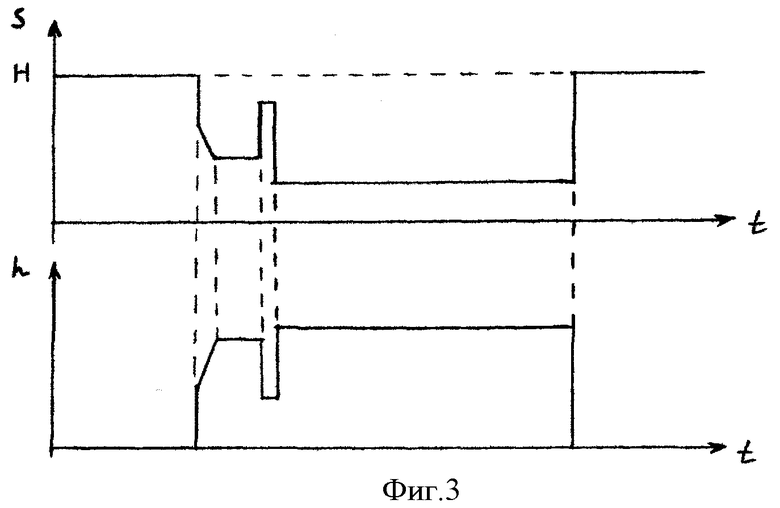
Фиг.3 - временные диаграммы соответственно сигнала расстояния S(t) на выходе датчика расстояния 1 и сигнала высоты h(t).
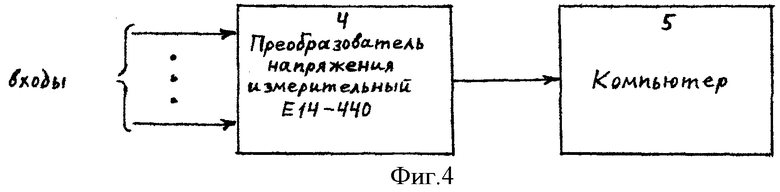
Фиг.4 - пример структурной схемы аналитического устройства 3.
Осуществление изобретения
Ниже приведен пример устройства опознавания транспортных средств, предназначенного для работы в составе автоматизированного пункта учета движения на дороге, имеющей N проезжих полос. С помощью этого устройства определяется состав транспортного потока по каждой проезжей полосе дороги и в целом по всей дороге.
Это устройство опознавания транспортного средства содержит:
- 2N датчиков расстояния (где N - число проезжих полос дороги), предназначенных для формирования сигналов, содержащих информацию о расстоянии (на фиг.1 показан пример подключения датчиков расстояния 1 и 2, расположенных над одной проезжей полосой дороги);
- аналитическое устройство 3, предназначенное для анализа или для обработки и анализа поступивших на него сигналов.
Выходы всех датчиков расстояния соединены с соответствующими входами аналитического устройства 3. Датчики расстояния могут быть, например, оптические (на инфракрасных лучах) или ультразвуковые. Над каждой полосой дороги располагают (например, вертикально) два датчика расстояния, разнесенные друг от друга вдоль дороги на известное расстояние L. На фиг.2 приведен пример расположения датчиков расстояния 1 и 2 над одной проезжей полосой дороги. Поскольку второй из этих датчиков (допустим, что это датчик расстояния 2) нужен для определения скорости движения транспортного средства, для определения которой не требуется высокая точность измерения расстояния (требуется только определять факт того, что измеренное расстояние больше или меньше критического), то в качестве него можно использовать дешевый датчик расстояния с большой погрешностью измерения (погрешность измерения может составлять примерно до 0,5 метра).
В качестве или в составе аналитического устройства 3 может быть применен, например, контроллер или компьютер, работающий по соответствующей программе. Если при этом используемые датчики расстояния формируют аналоговые выходные сигналы (например, сигнал S(t), показанный на фиг.3), то аналитическое устройство 3 должно содержать на своих входах, соединенных с выходами этих датчиков, по меньшей мере один аналого-цифровой преобразователь. Для подключения датчиков расстояния к компьютеру может быть использован, например, выпускаемый ЗАО «Л-КАРД» (117105, г.Москва, Варшавское шоссе, д.5, корп.4, стр.2) преобразователь напряжения измерительный Е14-440, который может преобразовывать до 32 аналоговых сигналов в цифровой вид и передавать их в компьютер через порт USB. На фиг.4 приведен пример выполнения аналитического устройства 3, содержащего преобразователь напряжения измерительный Е14-440 (на фиг.4 блок 4), аналоговые входы которого являются входами аналитического устройства 3, а выход соединен с входом компьютера 5, монитор которого является визуальным выходом аналитического устройства 3 и соответственно устройства опознавания транспортных средств. Аналогично преобразователь напряжения измерительный Е14-440 может быть использован для подключения датчиков расстояния к контроллеру, выход которого будет являться выходом аналитического устройства 3 и соответственно устройства опознавания транспортных средств.
Работает заявленное устройство и соответственно выполняется заявленный способ следующим образом.
Когда под датчиками расстояния 1 и 2 не проезжает транспортное средство, выходной сигнал каждого из них содержит информацию о расстоянии между ним и дорогой (если датчик расстояния расположен вертикально, то информацию о высоте его расположения над дорогой Н), т.е. что измеренное расстояние больше критического (критическое расстояние выбирается немного меньше расстояния между датчиком расстояния и дорогой, например, на 0,3 м). Выходные сигналы датчиков расстояния 1 и 2 поступают на соответствующие входы аналитического устройства 3, которое анализирует эту информацию в соответствии с запрограммированным в нем алгоритмом анализа и выдает сигнал об отсутствии транспортного средства.
Когда по проезжей полосе, над которой расположены датчики расстояния 1 и 2, проезжает транспортное средство 6 (см. фиг.2), выходной сигнал каждого из этих датчиков содержит информацию о расстоянии S(t) между ним (т.е. между известной точкой пространства) и находящейся в данный момент времени под ним точкой или частью поверхности транспортного средства 6. Эти сигналы поступают в аналитическое устройство 3, которое анализирует эту информацию в соответствии с запрограммированным в нем алгоритмом анализа и определяет с помощью нее следующую информацию:
1. Наличие транспортного средства 6 (оно определяется по факту того, что измеренное датчиками 1 и 2 расстояние меньше критического, критическое расстояние выбирается меньше расстояния между датчиками и дорогой, например, на 0,3 м).
2. Направление движения транспортного средства 6 (оно определяется по тому, какой из датчиков (1 или 2) отреагировал на движение транспортного средства 6 первым). Определение направления движения транспортного средства не является обязательным и может не выполняться.
3. Скорость движения транспортного средства 6 V, которая может быть вычислена по формуле
V=L/t12,
где L - расстояние между датчиками 1 и 2, t12 - время между началами или концами реагирования датчиков 1 и 2 на транспортное средство 6.
4. Полный или частичный профиль транспортного средства 6, в том числе геометрические параметры элементов этого профиля и длину транспортного средства 6. Высоту над дорогой любой точки поверхности транспортного средства 6, расстояние между которой и датчиком расстояния 1 измеряет датчик 1, можно вычислить по формуле
h(t)=H-S(t),
где Н - высота над дорогой датчика расстояния 1. На фигуре 3 приведены временные диаграммы соответственно сигнала расстояния S(t) на выходе датчика расстояния 1 и вычисленного сигнала высоты h(t) при проезде под этим датчиком транспортного средства 6, изображенного на фиг.2. Изображение временной диаграммы сигнала высоты h(t) совпадает с изображением профиля транспортного средства 6. Используя вычисленную скорость транспортного средства 6 и временную диаграмму сигнала S(t) или h(t), можно вычислить геометрические параметры профиля и длину транспортного средства 6. Недостающую информацию по меньшей мере об одной части профиля транспортного средства 6 можно получить путем аппроксимации.
5. Тип транспортного средства 6 (т.е. опознает транспортное средство 6), который определяется путем анализа по запрограммированному алгоритму анализа полного или частичного профиля транспортного средства 6.
Процесс анализа может быть засинхронизирован, например, в момент времени определения наличия транспортного средства 6, т.е. в момент времени, в который измеренное датчиком 1 или 2 расстояние становится меньше критического.
После определения типа транспортного средства 6, т.е. после его опознания, аналитическое устройство 3 (например, компьютер) формирует на своем выходе сигнал о типе транспортного средства 6. Кроме этого сигнала аналитическое устройство 3 также может формировать на своем выходе сигналы о номере проезжей полосы, и/или о направлении движения, и/или о скорости движения, и/или о профиле, и/или о длине транспортного средства 6. Эти сигналы могут подаваться, например, на монитор.
Аналогично аналитическое устройство 3 определяет наличие, направление движения, скорость движения, профиль и тип каждого проезжающего транспортного средства по каждой проезжей полосе дороги, над которой расположены соответствующие датчики расстояния, и формирует на своем выходе сигналы, содержащие эту информацию о каждом проезжающем транспортном средстве и о номере проезжей полосы, по которой оно проезжает. Аналитическое устройство 3 может также формировать на своем выходе сигналы, содержащие информацию о количестве проехавших в каждом направлении транспортных средств в каждой классификационной группе (т.е. транспортных средств одного типа) и общем количестве проехавших в каждом направлении транспортных средств. Все выходные сигналы аналитического устройства 3 могут подаваться, например, на монитор.
Если информация о направлении движения, скорости движения и длине транспортных средств не требуется, то над каждой проезжей полосой дороги достаточно располагать только датчик расстояния 1, выходной сигнал которого будет соответствовать профилю проезжающего под ним транспортного средства, но не содержать информацию об истинной пропорции длин элементов профиля в вертикальном и горизонтальном направлении, которая не является необходимой для опознавания транспортного средства. Если этот сигнал подать на вход аналитического устройства 3 и с помощью него провести анализ по соответствующему алгоритму информации, содержащейся в этом сигнале, то можно определить тип проехавшего транспортного средства, т.е. опознать транспортное средство.
С целью снижения отрицательного влияния помех аналитическое устройство 3 может содержать по меньшей мере на одном своем входе по меньшей мере одно устройство обработки сигналов (например, частотный фильтр, не пропускающий помехи, частотный спектр которых не совпадает с частотным спектром полезных сигналов).
Только по одному измеренному расстоянию между одной точкой поверхности транспортного средства и одной известной точкой (например, по измеренной высоте расположения датчика расстояния 1 относительно крыши транспортного средства, т.е. по измеренному расстоянию между точкой на крыше транспортного средства и датчиком расстояния 1) можно опознать, например, легковой автомобиль, так как его высота меньше, чем у грузового автомобиля или автобуса, и соответственно расстояние между его крышей и датчиком расстояния 1 больше, чем между крышей грузового автомобиля или автобуса и датчиком расстояния 1.
Датчики/датчик расстояния могут быть расположены над обочиной/обочинами дороги, а не над проезжими полосами дороги или не только над проезжими полосами дороги. При этом высота их/его расположения относительно дороги может быть больше высоты транспортных средств. Опознавание транспортных средств в этом случае может производиться по их полному или частичному профилю, полученному с помощью датчиков/датчика расстояния под углом относительно вертикальной плоскости.
Изобретение относится к области опознавания транспортных средств и может использоваться, например, в пунктах учета движения для определения состава транспортного потока. Наиболее целесообразно использование изобретения на дорогах, имеющих большое количество проезжих полос. Согласно предложенному способу определяют наличие транспортного средства путем того, что измеряют расстояние по меньшей мере от одной известной точки пространства до поверхности. Когда измеренное расстояние становится меньше критического, считают наличие транспортного средства определенным. Далее измеряют расстояния по меньшей мере от одной известной точки пространства до точек поверхности транспортного средства по меньшей мере в один известный момент времени относительно момента определения наличия транспортного средства. При необходимости определяют скорость движения транспортного средства. С помощью полученной информации определяют геометрические параметры транспортного средства и принимают решение о его типе. Изобретение направлено на снижение стоимости и сложности устройства опознавания транспортных средств при той же достоверности опознания. 9 з.п. ф-лы, 4 ил.
1. Способ опознавания транспортных средств, характеризующийся тем, что
определяют наличие транспортного средства путем того, что измеряют расстояние по меньшей мере от одной известной точки пространства до поверхности, и, когда измеренное расстояние становится меньше критического, считают наличие транспортного средства определенным,
измеряют расстояния по меньшей мере от одной известной точки пространства до точек поверхности транспортного средства по меньшей мере в один известный момент времени относительно момента определения наличия транспортного средства,
при необходимости определяют скорость движения транспортного средства,
с помощью полученной информации определяют геометрические параметры транспортного средства и принимают решение о его типе.
2. Способ по п.1, отличающийся тем, что скорость движения транспортного средства определяют путем того, что измеряют время прохождения транспортного средства между известными точками пространства, а затем, используя значения измеренного времени прохождения транспортного средства между известными точками пространства и известного расстояния между этими точками, вычисляют скорость движения транспортного средства.
3. Способ по п.2, отличающийся тем, что время прохождения транспортного средства между известными точками пространства измеряют путем того, что измеряют время, в течение которого разнесенные на известное расстояние датчики расстояния выдают информацию о расстоянии, меньшем или большем критического, и/или измеряют время между моментами времени начала или конца выдачи этими датчиками информации о расстоянии, меньшем или большем критического.
4. Способ по любому из пп.1-3, отличающийся тем, что для формирования информации о критическом расстоянии используют информацию о расстоянии по меньшей мере между одной известной точкой пространства и дорогой.
5. Способ по п.4, отличающийся тем, что критическое расстояние выбирают меньше расстояния по меньшей мере между одной известной точкой пространства и дорогой.
6. Способ по п.1, отличающийся тем, что определяют геометрические параметры транспортного средства и принимают решение о его типе автоматически.
7. Способ по п.6, отличающийся тем, что определяют геометрические параметры транспортного средства и принимают решение о его типе автоматически путем работы компьютера и/или контроллера по соответствующей программе.
8. Способ по любому из пп.1, 2, 3, 6, 7, отличающийся тем, что точки, между которыми измеряют расстояние, располагают на линии или вблизи линии, перпендикулярной горизонтальной плоскости, при этом в первом случае измерение расстояний от известных точек пространства до точек поверхности транспортного средства производят путем измерения высоты известных точек над поверхностью транспортного средства.
9. Способ по любому из пп.1, 2, 3, 6, 7, отличающийся тем, что геометрические параметры транспортного средства определяют путем получения информации по меньшей мере об одной части профиля транспортного средства.
10. Способ по п.9, отличающийся тем, что недостающую информацию по меньшей мере об одной части профиля транспортного средства получают путем аппроксимации.
| US 5839085 А, 17.11.1998 | |||
| СИСТЕМЫ ОПОЗНАВАНИЯ И НАВЕДЕНИЯ ПРИ ПАРКОВКЕ ВОЗДУШНЫХ СУДОВ | 2000 |
|
RU2268498C2 |
| МНОГОЗОНОВАЯ СТАЦИОНАРНО-ПЕРЕДВИЖНАЯ СИСТЕМА КОНТРОЛЯ ЗА ДВИЖЕНИЕМ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2137203C1 |
| Устройство для определения типа и счета транспортных средств | 1983 |
|
SU1128284A1 |
| Устройство для определения типа и счета транспортных средств | 1982 |
|
SU1064289A1 |
| Устройство для определения типа и счета транспортных средств | 1982 |
|
SU1048499A1 |
| Устройство для опознавания и счета движущихся транспортных средств | 1977 |
|
SU691915A1 |

