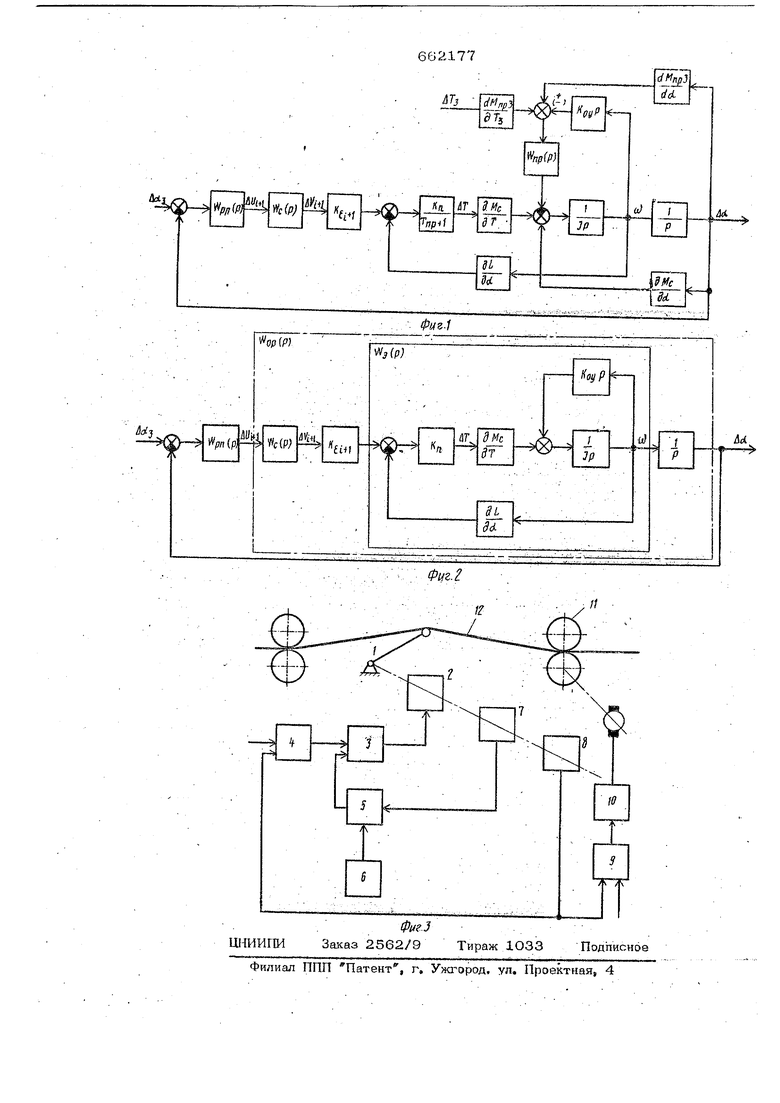
Коррекция момонтй привода пегледержатепя ,по ускорению (обратная связь по ускорению) с постоянным коэффициентом передачи (, c®hs-l: jf о) лишь смещает диапазон возможных значений Тд в сторону больших (при отрицательной обратной связи) или меньших (при положительной обратной связи) значений, не уменьшая вепичйкы диапазона, В состав объекта регулирования контура положения входит замкнутая система регулирования скорости прокатных; валков с передаточной функ шей We (Р). - , -: Поскольку контур регулирования скорости прокатных валков является подчиненным по отношению к контуру регулирования йойожения петле держателя, то coi ласио общей методике расчета систем под чиненного регулирования, передаточную функдаю WC(P) можно представить в виде апериодического звена с( Т р.Т где KQ - коэффициент усиления замкнутого контура скорости прокатных валков; Т - постоянная времени замкнутого контура скорости. В качестве некомпенсируемой постоянной времени контура положения Т. при мем сумму, . . Топ- с- эИзвестно, что быстродействие систем определяется частотой србза Шор эначетте которой можно определить из выра 5КЕНИЯ. -tdCTe- Tg c xjn- где С| - коэффициент, зависящий от выбр анной степени демпфирования. При оптимизации контура положений по техническому или симметричному оптимуму коэффициент d принимают равны двум (d 2). При изменении величину Постоянной частота Среза Контура долмга выбираться дйя наихудшего (по условиям устойчивости) сочетания параметров процесса прокатки т.е. для максимального значения Тд , соответствующ го прокатке с максимальной скоростью полосы минимального сечения (я «(, Следствием этого является снижение .быс родействия системы регулирования. Этот недостаток всего П1ЮЯ1)ляотся на BbicoKocKopocTW.ix станах с 1иироким со()амеитом щюкатывпямых полос, т.е. там, где требования к динамическим свойствам истемы наиболее жесткие. Целью изобретения является увепичение быстродействия системы регулирования натяжения полосы при изменении параметров процесса прокатки в широком диапазоне. Цель достигается тем, чтосигнал коррекции вращающего момента по ускорению петледержателя Изменяют пропорционёль- но разности сигнала, пропорционального моменту инерции петледержателя, и отношения сигнала, пропорционального сеченйю полосы в мёжклетевом промежутка к сигналу скорости полосы в этом же межклетевом промел утке. . . Для этого коэффициент передачи KQ цепи коррекции вращаюи его момента привода петледержателя по ускорению изменяют в соогветсгвии с формулой $ , . у где 3 - суммарный момент инерции петпедержателя и его привода; В - коэффициент пропорциональности} S - сечейие полосы в межклетеврм промежутке; скорости полосы в межклетёвом промежутке Коэффициент В определяется из вырйженияTi-T К . Ч. 9Т Эс. где Тхч „. - желаемое значение постоянной времени Тд .; : . Структурная схема известного способа автоматического регулирования натягжения построена на основе следующей системы уравнений: 1 (д/ пр-лАЛ), .з; .oL} пр-з зт. /5.dc±KQ,ptAJ; ,,,AV,,-Kg.AV,) ..); Kg..-(its;), .)AU.-, ( гдя ЦЗД- угповая скорость и положение петпедержатепя; О - суммарный момент инерции петпэдержателя и его привода; MC- статический момент на валу петладержателя; уставка момента привода пэтледержателя, соответственно; ТДз - натяжение и уставка натяжения, соответственно; , - передаточный коэффициент и постоянная времени системы валки поярса - относительное обжатие в выходной клети меяскпетевого промежутка; 3, , опережение;л окружная скорость прокатных валков; - напряжение уставкк скорости прокатных вапков; . коэффициент передачи цепи кор рекции )аращаюшего момента привода п тпедержатепя по ускорению; Vpn(p)- передаточнаяфункция регупятора положёная петледержатепя; ),(р лередаточные функции системы регулирования скорости ирокатньсх валков и системы регулирования врашаюшего момента приводного даигйтепя (пе гпедержаге пя. Для безразличной характеристики сис темы справедливо ЭМпр-а ЭМс . gMc ad. Qoc Для упрощения анализа динамики сйстёмь регулирования прен ебрегаем постоянной времени полосы Тр 0. Будем считать, что быстродействие системы регулирования момента приводного двигателя.петледержателя достаточно велико, в связи с чем постоянными времени замкнутого контура регулирования момента также можно пренебречь и считать пР,-Чр- После преобразований с учетом 18, 19, 20 структурная схема примет вид, приведенный на фиг. 2, в которой пёре даточная функция звена /(Р) будет . иметь вид. . , Для конкретного стана в рабочем диапазоне углов подъема петледержателя эь ченияЛ, ггИт-г.можно c4HtaTb посто- о т ал янными. С учетом выражений 2 и 21 передаточная функция объекта регулирования WPP (Р) контура положения петледвржателя будет иметь вид. ; KcKg.l WopCp-) °РРСТер Я(Т Подставив выражение 6 в 22 с учетом 7, получим Тз-т. Таким образом, при изменении коэффициента передачи Кры в соответствии с выражением 6 величина постоянной времени эквивалентного звена Т становится постояшюй, не зависящей от площади попе;речного сечения и скорости полосы в меж; клетевом промежутке. Из этого следует, что частота среза контура положения петледержатепя может, быть выбрана не для наихудшего случая, а для определенного значения эквивалентной постоянной времени Ш „---7---.-, (25) Поскольку принимают Т- -i т, „р сохранении той же степени Яёмпфиованиа это приводит к увеличению частосреза койтура положения пeтпeдёt5жaтe я, а следовательно, и к увеличению быс- одействия системы. На фиг. 1 и фиг. 2 приведены полная упрошенная структурные схемы системы егулирования натяжени;я, поясняющие изестный и предлагаемый способы регуливания; на фиг. 3 - блок-схема системы гулирования натяжения полосы, реалкзущая предлагаемый способ. Основные элементы блок-схемы: петлержатель 1, приводной двигатель 2 пет- держателя, система 3 регулирования П);ИЦ,ТЮЩО1-О МОМОИТа приводного ЛВИГЭТ пя 1тотпгп ржптг:пя С вхо/нгым сумматором, уст 1ойстпо 4 форкяфовшптя уставки враlU.iKiiuoro момоптп, миожитопыюо устрой(лво Гт, вьппюпитопыюо устройство G, ио- мгритопь 7 ускорения петпедоржатспя (в качестве нзморитепя ускорения может испот зоваться датчик скорости или ЭЦС двигателя петпедержателя .с дифферендиру- юшнм устройством на выходе), датчик 8 положения петпедержателя, регулятор 9 положения петпедержателя, система 10 регулирования скорости прокатных валкоа 11, попоса 12, Регугафоваиие натяжения полосы 12 в мсжкпетсвом промежутке происходит путем воздействия на скорость прокат1 ых вапков 11 через регулятор 9 положения и систему 10 регулирования скорости вал Ков по положетгаю петледержателя 1, ко торое определяется датчиком по ожешш 8 Равновесие системы иаступает при ра венсгве момента, создаваемого нагяжение полосы 12, относительно оси пегпедержателя 1, и вращающего момента привод™ иого двигателя 2 ггетледержатёля Момент приводного двигателя 2 регутфуется системой 3 регулирования вращающего мо«мента. Уставка .врашающего момента приводного двигателя формируется специальным устройством 4 в функций уставгеи натяжения и положения петледержателя и подается на входной сумматорсистемы 3. На другой вход сумматора сг1стеглы 3 через множйгепьное устройство .5 с измеригеля. ускорения 7 заводится сигнал, который осуществляет коррекцию вращающего момента Приводного двип атепя петледе жатепя по ускорению пегледержателя. На второй, вход множительного устройства 5 с выхода вычислительного утзаройства 6 подается сигнал, пропорциональны К(,и результате чего с:игнал коррекхши вращающего момента изменяется в функд сечёнйя и скорости nonocbt в межклетевом |) соотвптствни с продаожониой юр-мупой изоб1-|5тоиия. Сигнал на выходе ычнспитопьного устройства 6 формируется о уравнению 22. Формула и а о б р е т е н и я Способ автоматического регулирования натяжения полосы в межкпетевом проме жутке прокатного стана путем изменения соотнои-гення скоростей прокатных вапков смежных клетей в зависимости от изме- . ряемой величины угла подъема нетледерЖателя, вращающий момент приводного шигaтeля которого изменяет в зависимости от величины уставки натяжения полосы и измеренной величины угла подъема петледержатепя и корректируют по веЛичине ускорения петпедержателя, отличающийся тем, что, с целью увеличения быстродействия системы регулгфования натяжения полосы при изменении параметров процесса прокатки в широком диапазоне, скгтшл коррекции вращающего момента по ускоретппо петледержатепя изменяют пропорционально разности сигнала, пропорционального MoMeifty инерции петледержателя, и отноше гая сигнала, пропорционального Сечению полосы в межклетевом промежутке, к сигналу скорости rioпосы в этом же межклетевом промежутке. Источп икй информации, принятые во вниматше при экспертизе 1.Каретников В. Ф., Лацидус Н.И. Система автоматтгческой стабилизации натяжйния полосы непрерывного широкополосного стана горячей прокатки. Труд V Всесоюзной конференции. по автоматизированному электроприводу, т IJF.M.,Энергия, 1971, с, 110. 2.Отчет ВНИИМетмаш HP 36-76. Исследование электромеханических петледержателей стана 2000 НЛМЗ, 1974.
йЛ1
М

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПРОКАТЫВАЕМОЙ ПОЛОСЫ В ПЕРВОМ МЕЖКЛЕТЕВОМ ПРОМЕЖУТКЕ ЧИСТОВОЙ ГРУППЫ СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2016 |
|
RU2646305C1 |
| Устройство для измерения межклетевого натяжения на непрерывном стане горячей прокатки | 1980 |
|
SU876230A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ В МЕЖКЛЕТЕВОМ ПРОМЕЖУТКЕ ШИРОКОПОЛОСНОГО СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2010 |
|
RU2446026C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕТЛЕДЕРЖАТЕЛЯ ПРИ ЗАПРАВКЕ ПОЛОСЫ В КЛЕТИ ЧИСТОВОЙ ГРУППЫ СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2016 |
|
RU2643157C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МЕЖКЛЕТЕВОГО НАТЯЖЕНИЯ ПОЛОСЫ | 1999 |
|
RU2147951C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПРОКАТКИ В НЕПРЕРЫВНОЙ ГРУППЕ КЛЕТЕЙ | 2011 |
|
RU2477187C2 |
| Способ автоматического управления электроприводами петледержателей чистовой непрерывной группы клетей стана горячей прокатки | 1982 |
|
SU1041189A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ В ПРОЦЕССЕ ПРОКАТКИ МЕЖДУ КЛЕТЯМИ МНОГОКЛЕТЬЕВОГО СТАНА С ПЕЧНЫМИ МОТАЛКАМИ | 2002 |
|
RU2268800C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СКОРОСТЕЙ СМЕЖНЫХ КЛЕТЕЙ ШИРОКОПОЛОСНОГО СТАНА ГОРЯЧЕЙ ПРОКАТКИ ПО ЗАДАННОМУ МЕЖКЛЕТЕВОМУ НАТЯЖЕНИЮ ПОЛОСЫ И ВЕЛИЧИНЕ ПЕТЛИ | 1998 |
|
RU2126304C1 |
| ЮЭИАЯ В. М. Котов и Г. Е. Люльки-.,-.- ^ :. ..':^Институт автоматики | 1970 |
|
SU279551A1 |
..- Фиг-1
